Изобретение относится к вычислительной технике и является управляющей системой, предназначенной для сбора информации от корабельных систем и комплексного представления информации на мониторах, а также для управления поворотными устройствами электронно-оптических визиров.
Известна корабельная управляющая система [1], состоящая из нескольких электронно-вычислительных машин (ЭВМ), системных интерфейсных магистралей, мультиплексных каналов информационного обмена (МКИО). Основным недостатком этой системы является отсутствие аппаратных средств сопряжения с объектами управления (ОУ) и системами, обеспечивающими использование ОУ.
Известна корабельная система выработки данных и управления [2], содержащая накопитель, пульт управления (ПУ), устройство сопряжения с источниками информации и обеспечивающими системами - аппаратно-программный контур сопряжения с источниками информации и обеспечивающими системами (АПКС с ИИ и ОС), внешнюю радиальную информационную сеть (ВРИС), два устройства сопряжения с ОУ - аппаратно-программного контура сопряжения с ОУ (АПКС с ОУ), восемь каналов ввода-вывода и имитатор ОУ, в которой:
- в состав ПУ входят сенсорный манипулятор, ключи блокировки, клавиатура, НГМД, монитор;
- в состав ВРИС входят первый и второй коммутаторы ВРИС и радиальные каналы связи;
- АПКС с ИИ и ОС состоит из двух микропроцессорных вычислительных устройств (ЭВМ), каждое из которых содержит центральный процессор (ЦП), оперативное запоминающее устройство (ОЗУ), перепрограммируемое постоянное запоминающее устройство (ППЗУ), контроллер мультиплексного канала информационного обмена (МКИО), контроллер релейного обмена (РО), два контроллера ВРИС, две локальные сети (ЛС), и двух комплектов блоков сопряжения, каждый из которых содержит три блока МКИО и один блок РО;
- каждый АПКС с ОУ содержит ЭВМ, состоящую из ЦП, контроллера каналов ARINC, ОЗУ, ППЗУ, двух контроллеров ВРИС и двух ЛС, комплект блоков сопряжения, содержащего четыре блока канала ARINC;
- каждый канал ввода-вывода содержит блок блокировки цепей связи (ЦС), модуль контроля аналоговых параметров, коммутатор цепей связи и блок усилителей релейных сигналов (PC).
Основными недостатками данной системы являются:
- невозможность взаимодействовать с разнотипными ОУ;
- малое количество одновременно подготавливаемых к работе ОУ;
- перегрузка ВРИС при данной организации системы и, как следствие, невозможность одновременной подготовки к работе и использования большого количества ОУ.
Известна интегрированная мостиковая система (ИМС) разработки группы компаний «Транзас»[3], включающая несколько радаров, соединенных с многофункциональными дисплеями, интегратор навигационной информации с комплексом датчиков навигационных данных, коммутатор радиосвязи, несколько автоматизированных рабочих мест операторов (судоводитель, инженер-механик, штурман и т.д.), снабженных гибкоперестраиваемыми многофункциональными дисплеями, несколько электронно-вычислительных машин, связанных между собой посредством системных интерфейсных магистралей и мультиплексных каналов информационного обмена. К числу недостатков данной системы следует отнести ограниченный набор подключаемого оборудования в соответствии с требованиями, устанавливаемыми для торговых судов гражданского назначения. К числу недостатков данной системы следует отнести тот факт, что система не обеспечивает сопряжения с электронными визирами, навигационным комплексом по мультиплексному каналу, сопряжение с гидроакустической станцией обнаружения подводных объектов и метеорологическим комплексом, а также отсутствие возможности контролировать состав особо важных навигационных параметров при нахождении командира на ходовом посту корабля, т.е. вне операторского места.
Известно решение навигационного комплекса для высокоскоростных судов [4], состоящего из приемоиндикатора, измерителей скорости и курса, автопрокладчика вычислителя, навигационного пульта управления, эхолота и индикатора, в котором навигационный пульт управления соединен с радиолокационной станцией и авторулевым, при этом комплекс дополнительно содержит электронную картографическую навигационную систему, блок сопряжения с рулевым приводом и магистраль обмена информацией, соединенную своими входами-выходами с входами-выходами приемоиндикатора, измерителей скорости и курса, автопрокладчика, вычислителя, навигационного пульта управления, электронной картографической навигационной системой, радиолокационной станцией, блоком сопряжения с рулевым приводом и эхолотом, при этом приемоиндикатор выполнен в виде совмещенного приемоиндикатора радионавигационных и спутниковых навигационных систем [4]. Данный комплекс имеет узкое применение в качестве преимущественно навигационного-измерительного оборудования и предназначен для использования на отдельном классе судов. Система также как и в предыдущем случае не обеспечивает сопряжения с системами внешнего наблюдения, системой обнаружения подводных объектов, возможности полного и комплексного контроля основных навигационных параметров и прогнозирования состояния судового оборудования и его дистанционной диагностики.
Также известны вычислительные устройства и системы различного назначения для передачи информации между узлами распределенных вычислительных систем, например, многопроцессорная корабельная система обработки данных [5], содержащая микропроцессоры, устройство обмена информацией, блоки ввода-вывода, внешние запоминающие устройства, первую и вторую интерфейсные магистрали обмена, пульт управления, блоки ввода данных от корабельных источников. Система имеет недостаточную надежность в случае отказа отдельных элементов, а также очевидные недостатки тестового контроля, не полностью проверяющего функционирование входящих в состав системы узлов.
Известна также корабельная автоматизированная система управления [6], содержащая центральный прибор управления и связи, в состав которого входят две ЭВМ, адаптер цифрового ввода-вывода, адаптер мультиплексного канала, адаптер последовательного канала обмена, каналы релейного обмена, адаптеры локальной вычислительной сети. Указанное устройство имеет следующие недостатки:
- структурная организация не обеспечивает высокого уровня надежности устройства, т.к. при отказе ЭВМ пропадает связь с источниками и объектами управления;
- отсутствует дублирование внешних связей корабельных обеспечивающих систем и связей с объектами управления;
- ограничения связи между ЭВМ по магистральной вычислительной сети.
Наиболее близким по технической сущности аналогом (прототипом) к заявляемому изобретению является устройство корабельной системы управления [7], содержащее центральный прибор управления, соединенный с основным и резервным контурами сопряжения с корабельными системами, в каждый из которых включены объединенные между собой по внутренней интерфейсной магистрали модуль вычислитель, модуль мультиплексных каналов обмена, модуль релейного обмена, адаптер переключения локальной вычислительной сети, модуль коммутатор локальной вычислительной сети, причем внешние входы-выходы модуля мультиплексных каналов обмена основного и резервного контуров сопряжения подключены соответственно к основным и резервным мультиплексным каналам корабельной обеспечивающей системы, внешние входы-выходы модулей релейного обмена основного и резервного контуров сопряжения объединены и подключены к исполнительным механизмам и сигнализаторам корабельной системы, первый и второй сетевые входы-выходы адаптера переключения локальной вычислительной сети каждого из контуров сопряжения подключены соответственно ко входам модулей коммутаторов локальной вычислительной сети своего и параллельного контуров сопряжения, внешние сетевые входы-выходы модуля коммутатора локальной вычислительной сети основного и резервного контуров сопряжения через основную и резервную радиальные локальные вычислительные сети соответственно подключены к устройствам корабельной системы управления.
К недостаткам известной корабельной системы управления с устройством сопряжения следует отнести недостаточную эффективность при обработке и трансляции информации в режиме реального времени, заключающуюся в том, что данные навигационного комплекса, входящего в состав корабельной обеспечивающей системы, принимаются в формате мультиплексного канала, преобразуются в устройстве сопряжения в формат данных локальной вычислительной сети, по которой передаются в устройства сопряжения с объектами управления. Такая организация обработки загружает модуль вычислитель и приводит к перегрузке локальной вычислительной сети и снижению потоковой скорости передачи данных.Также недостатком устройства являются невозможность приема переменных аналоговых данных от датчиков корабельной системы, преобразования их в цифровую форму и обработки вычислителем устройства, отсутствие сопряжения с системами внешнего наблюдения, системой обнаружения подводных объектов и невозможность осуществления полного и комплексного контроля основных навигационных параметров и прогнозирования состояния судового оборудования и его дистанционной диагностики.
Целью заявляемого технического решения является создание интегрированной мостиковой системы, обладающей универсальностью и более широкими функциональными возможностями.
Технический результат, достигаемый заявленным изобретением, заключается в повышении отказоустойчивости и надежности функционирования, возможности наращивания системы и расширения спектра подключаемых внешних и обеспечивающих корабельных систем.
Заявленный технический результат достигается тем, что корабельная интегрированная мостиковая система, содержащая пульт управления с устройством отображения информации, соединенная с основным и резервным контурами сопряжения с корабельными обеспечивающими системами, в каждый из которых включены объединенные между собой внутренней интерфейсной магистралью центральный процессор, модуль мультиплексных каналов обмена, адаптер локальной вычислительной сети, модуль коммутатор локальной вычислительной сети, причем сетевые входы-выходы платы-адаптера локальной вычислительной сети каждого из контуров сопряжения подключены соответственно ко входам модулей коммутаторов локальной вычислительной сети своего и параллельного контуров сопряжения, внешние сетевые входы-выходы модулей коммутаторов локальной вычислительной сети основного и резервного контуров сопряжения подключены к основным и устройствам корабельной системы управления, при этом, в отличие от прототипа, выполнена многосекционной, содержащей набор пультовых секций основного и резервного контура, состоящих из комплекса функционально объединенных аппаратно-программных средств и модулей, связанных между собой по основному и резервному каналам локальной сети и включающих, по меньшей мере, по две пультовые секции, подключенные к сопрягаемым внешним корабельным системам, и общую секцию системы питания конструктивно объединенных в интегрированный пульт, причем одна из пультовых секций основного и резервного контуров содержит связанные между собой по стандартным интерфейсам связи монитор, клавиатуру, манипулятор и устройство вычислительное (УВ) электронной картографической системы, выполненное с обеспечением возможности вывода и отображения на мониторе текущей информации об основных навигационных параметрах, а также содержит коммутатор локальной сети, выполненный с обеспечением возможности сопряжения с внешними корабельными системами и устройство распределения электропитания, вход которого связан с общей секцией системы питания, а выходы соединены со входами всех модулей обеих пультовых секций, при этом вторая пультовая секция в каждом из основного и резервного контуров содержит связанные между собой по стандартным интерфейсам связи монитор, клавиатуру, манипулятор и центральный прибор, входы-выходы которого выполнены с обеспечением возможности сопряжения с вешними корабельными системами сбора, передачи и вывода на монитор информации, по меньшей мере, о состоянии судового оборудования, причем центральные приборы основного и резервного контуров соединены между собой по резервному каналу локальной сети, а один из выходов соединен с выделенным цифровым табло навигационных параметров.
Центральный прибор может состоять из процессорной платы, по меньшей мере двух плат сопряжения с последовательными каналами, выполненных с обеспечением возможности передачи данных на цифровое табло навигационных параметров через выход, передачу команд управления на поворотное устройство электронно-оптического визира, прием данных от корабельной системы единого времени и прием формуляров целей (значения пеленга на цель и дистанции до цели) от навигационной радиолокационной станции, приема данных по формулярам целей от НРЛС, а также, прием данных от корабельного метеокомплекса, включающего по меньшей мере набор данных о текущем значении истинного ветра, текущем значении кажущегося ветра, давлении воздуха, температуре воздуха, влажности воздуха, высоте облаков и видимости, платы радар-процессора, выполненной с обеспечением возможности приема первичной радиолокационной информации, платы видеозахвата, выполненной с обеспечением возможности приема видеоизображения от электронного визира левого и правого борта, платы сопряжения с мультиплексным каналом, выполненной с обеспечением возможности приема навигационных данных, включающего по меньшей мере набор данных о текущем значении курса, скорости, координат, глубины под килем, значения бортовой качки и килевой качки, от навигационного комплекса по основному и резервному каналам, платы-адаптера локальной сети и объединительной платы.
Пультовые секции интегрированного пульта могут быть сопряжены по меньшей мере с одной навигационной радиолокационной станцией, системой автоматизированной автопрокладки, оптико-электронными системами видеонаблюдения, навигационного комплекса и/или некомплекскированных навигационных приборов, метеокомплексом, гидроакустической станцией, корабельной системой управления техническими средствами, с обеспечением возможности сбора, передачи и отображения текущей информации от сопряженных систем на мониторах пультовых секций и цифровом табло навигационных параметров.
Основной и резервный контуры могут быть выполнены с симметричной схемой вычислительных средств и содержать идентичный набор пультовых секций в каждом из контуров, с обеспечением возможности вывода на мониторы пультовых секций основного и резервного контура информации по выбору оператора, осуществляемому раздельно на каждой пультовой секции программно-аппаратным образом.
Цифровое табло навигационных параметров может быть выполнено в виде выносного устройства с устройством отображения информации, выполненным с гибкоперестраиваемым монитором сенсорным и/или аппаратным управлением, с возможностью отображения информации от любой пультовой секции основного или резервного контура, а также сопрягаемых корабельных систем по выбору оператора цифрового табло навигационных параметров.
Сущность изобретения поясняется чертежами фигур (фиг.1, фиг.2, фиг.3 и фиг.4), представляющих один из возможных вариантов выполнения ИМС, и для специалиста очевидно не являющихся исчерпывающим.
Фиг.1 - Структурная схема ИМС. Фиг.2 - Функциональная схема вычислительных устройств ИМС.
Фиг.3 - Алгоритмическая схема взаимодействия программных модулей функционального программного обеспечения центрального прибора при обмене информации с сопрягаемыми системами корабля.
Фиг.4 - Основные информационные поля интерфейса пользователя.
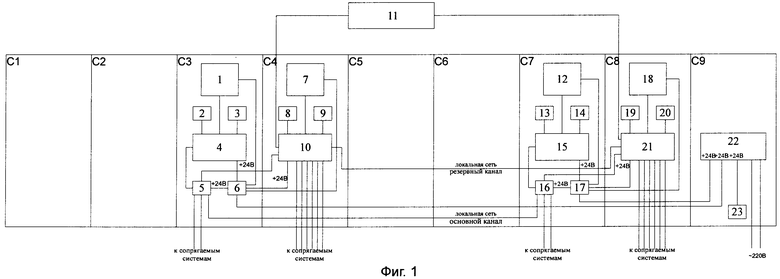
Как представлено на структурной схеме (фиг.1), ИМС в рассматриваемом примере реализации состоит из 9 пультовых секций (С1-С9), конструктивно объединенных в пульт интегрированный (ПИ) и цифрового табло навигационных параметров 11.
Основу ИМС составляет аппаратура, установленная в пультовых секциях, обозначаемых Сn, где n-порядковый номер пультовой секции:
Пультовая секция С3 содержит монитор 1, клавиатуру 2, манипулятор, выполненный, в частности, в виде трекбола 3, устройство 4 вычислительное (УВ) электронной картографической системы, коммутатор 5 локальной сети и устройство 6 распределения электропитания.
Пультовая секция С4 содержит монитор 7, клавиатуру 8, трекбол 9 и первый центральный прибор 10.
Пультовая секция С7 содержит монитор 12, клавиатуру 13, трекбол 14, устройство 15 вычислительное (УВ) электронной картографической системы резервной системы, коммутатор 16 локальной сети и устройство 17 распределения электропитания.
Пультовая секция С8 содержит монитор 18, клавиатуру 19, трекбол 20 и второй центральный прибор 21.
Общая секция С9 содержит систему электропитания, включающую блок 22 бесперебойного электропитания и аккумуляторные батареи 23.
Пультовые секции С1, С2, С5, С6 обеспечивают место для штатной установки в интегрированный пульт дополнительного встраиваемого оборудования, определяемого проектом корабля или функциональной необходимостью.
При включении системы блок 22 питания обеспечивает преобразование внешнего электропитания 220 В переменного тока во вторичное электропитание 24 В постоянного тока. Одновременно происходит подзаряд батарей 23. При пропадании внешнего электропитания блок 22 питания автоматически переключается на электропитание от батарей. Краткое время переключения обеспечивает продолжение работы всех устройств ИМС без перезагрузки.
Для распределения электропитания потребителей служат распределительные устройства 6 и 17.
Распределительное устройство 6 обеспечивает электропитанием монитор 1, устройство 4 вычислительное, коммутатор 5, монитор 7, первый центральный прибор 10.
Распределительное устройство 17 обеспечивает электропитанием монитор 12, УВ 15, коммутатор 16, монитор 18, второй центральный прибор 21.
Коммутаторы 5 и 16 обеспечивают сопряжение ИМС с внешними системами по интерфейсу Ethernet 100 Base/TX, а также - сопряжение двух блоков ЦП 10 и 21 по основному каналу локальной сети.
Прибор 4 УВ обеспечивает функционирование электронной навигационной информационной системы (ЭНИС), с обеспечением отображения на мониторе 1 текущего положения корабля на электронной навигационной карте и управления функциями программного обеспечения ЭНИС с помощью клавиатуры 2 и трекбола 3.
Прибор 15 УВ обеспечивает функционирование электронной картографической системы, с обеспечением отображения на мониторе 12 и управления с помощью клавиатуры 13 и трекбола 14.
Центральный прибор 10 обеспечивает сопряжение с различными корабельными системами, с отображением изображения на мониторе 7 графического интерфейса пользователя (см. рис.4) и управления функциями программного обеспечения (ПО) прибора ЦП с помощью клавиатуры 8 и трекбола 9.
Центральный прибор 21 обеспечивает сопряжение с различными корабельными системами, с обеспечением возможности отображения изображения на мониторе 18 и управления с помощью клавиатуры 19 и трекбола 20.
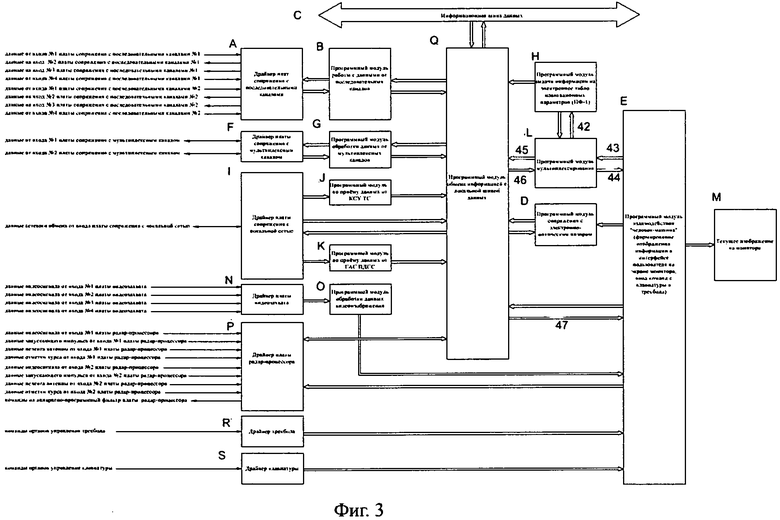
Функциональная схема вычислительных устройств ИМС - центральных приборов приведена на фиг.2.
Центральный прибор (ЦП) основной и резервных систем представляет собой промышленный компьютер с функциональным программным обеспечением, осуществляющим общее управление вычислительными процессами ИМС. При этом наличие 2 ЦП обеспечивает резервирование и бесперебойность работы ИМС в случае выхода из строя одного из контуров.
Первый центральный прибор 10 состоит из процессорной платы 24, платы 25 сопряжения с последовательными каналами №1, платы 26 сопряжения с последовательными каналами №2, платы 27 радар-процессора, платы 28 видеозахвата, платы 29 сопряжения с мультиплексным каналом, платы-адаптера 30 локальной сети, объединительной платы 31.
К первому центральному прибору 10 подключены клавиатура 8, трекбол 9, монитор 7.
Второй центральный прибор 21 состоит из процессорной платы 33, платы 34 сопряжения с последовательными каналами №1, платы 35 сопряжения с последовательными каналами №2, платы 36 радар-процессора, платы 37 видеозахвата, платы 38 сопряжения с мультиплексным каналом, платы-адаптера 39 локальной сети, объединительной платы 40.
Ко второму центральному прибору 21 подключены клавиатура 19, трекбол20, монитор 25.
К центральным приборам (ЦП) 10 и 21 подключено цифровое табло 11 навигационных параметров.
К первому прибору ЦП подключен коммутатор 32 первой локальной сети. Ко второму прибору ЦП подключен коммутатор 41 второй локальной сети.
Схема функционирования вычислительных средств симметрична, поэтому далее будет описана работа только «левой части» схемы.
Плата 25 сопряжения с последовательными каналами №1 обеспечивает передачу данных на цифровое табло 11 навигационных параметров через первый выход, передачу команд управления на поворотное устройство электронно-оптического визира левого борта (поз.А1, фиг.2), прием данных от корабельной системы единого времени (поз.А2, фиг.2) через второй вход, прием формуляров целей (значения пеленга на цель и дистанции до цели) от первой навигационной радиолокационной станции (НРЛС) (поз.А3, фиг.2) через третий вход.
Оператор ИМС может осуществлять наведение телекамер ВНЦУ и выбор текущей подключенной камеры (левый борт или правый борт корабля) с помощью соответствующих команд, вырабатываемых программой ЦП при воздействии оператора на соответствующие элементы графического интерфейса с помощью трекбола.
Плата 26 сопряжения с последовательными каналами №2 обеспечивает прием данных по формулярам целей от НРЛС (поз.А4 фиг.2) через первый вход, а также прием данных от корабельного метеокомплекса (текущее значение истинного ветра, текущее значение кажущегося ветра, давление воздуха, температура воздуха, влажность воздуха, высота облаков, видимость) (поз.А5, фиг.2) через второй вход.
Плата 27 радар-процессора обеспечивает прием первичной радиолокационной информации (ПРЛИ) - отраженные сигналы, принимаемые после излучения передатчика РЛС.
ПРЛИ от первой НРЛС (поз.А6, фиг.2) принимается на первый вход, ПРЛИ от второй НРЛС (поз.А7, фиг.2) принимается на второй вход. Переключение приема между первым и вторым входами осуществляется оператором вручную, при помощи выбора соответствующего элемента управления на графическом интерфейсе пользователя.
Плата 28 видеозахвата обеспечивает прием видеоизображения от электронного визира левого борта (поз.А8, фиг.2) на первый вход и электронного визира правого борта (поз.А9, фиг.2) на второй вход.
Плата сопряжения с мультиплексным каналом 29 обеспечивает прием навигационных данных (курс, скорость, координаты, глубина под килем, значение бортовой качки и килевой качки) от навигационного комплекса (поз.А10, фиг.2) по основному каналу на первый вход и резервному каналу на второй вход.
Первый коммутатор 32 обеспечивает прием информации от корабельной системы управления техническими средствами (КСУ ТС) (поз.А11, фиг.2) на первый вход и от гидроакустической станции обнаружения подводных диверсионных сил и средств (ГАС ПДСС) на второй вход.
КСУ ТС передает в ИМС информацию по срабатыванию датчиков пожарной и охранной сигнализации (охраняемых помещений корабля), а также данные по срабатыванию датчиков уровня воды, корабельным запасам топлива, воды, масла.
Гидроакустическая станция обнаружения подводных диверсионных сил и средств (ГАС ПДСС) передает в ИМС первичную гидроакустическую информацию по подводной обстановке и данные по формулярам целей ПДСС, выделенных оператором ГАС. Первичная информация представляет собой видеокадры ГАС ПДСС, сохраняемые раз в 2 сек с оригинальным разрешением и компрессируемые на стороне ГАС для уменьшения объема графика при их передаче. На стороне ИМС (в ЦП) данные видеокадры распаковываются и отображаются в соответствующем окне графического интерфейса оператора. Формуляры целей, выделенных оператором ГАС, отображаются в другом окне графического интерфейса оператора ЦП - на планшете ГАС. При этом вахтенный офицер корабля имеет наглядную информацию по ближней подводной обстановке, что повышает качество и скорость принимаемых им решений по защите корабля от ПДСС.
Кроме того, первый коммутатор 32 вместе со вторым коммутатором 41 обеспечивает сопряжение центральных приборов 10 и 21 по основному каналу локальной сети.
Основной канал локальной сети строится на базе двух неуправляемых коммутаторов 32 и 41 локальной сети.
Резервный канал связи между ЦП реализован с помощью прямой связи между процессорными платами двух ЦП по интерфейсу Ethernet 100 Base/T типа «точка-точка». В данном сегменте локальной сети передается весь массив информации, имеющийся на внутренней шине данных.
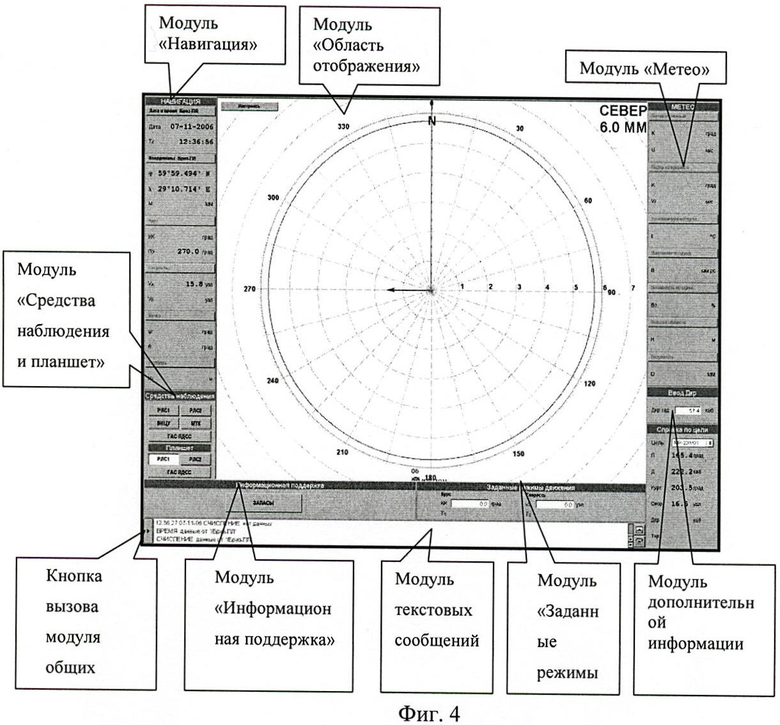
Процесс сбора и обмена информацией, осуществляемый в ИМС согласно заявляемому техническому решению, поясняется алгоритмической схемой взаимодействия программных модулей функционального программного обеспечения (ФПО) приборов ЦП, представленной на фиг.3.
При указании в описании аппаратных средств прибора ЦП приводятся ссылки на устройства, показанные на фиг.2. При указании в описании элементов графического интерфейса пользователя приводятся ссылки на элементы интерфейса, представленные на фиг.4.
В связи с симметричностью схемы вычислительных средств ИМС, в данном описании рассматривается функционирование только одного из приборов ЦП (поз.10 фиг.2). Второй прибор ЦП (поз.21 фиг.2) работает аналогично.
В рассматриваемом примере реализации в приборах ЦП используется операционная система (ОС) Linux. Драйверы плат прибора ЦП (A,I,N), a также, драйверы трекбола (R) и клавиатуры (S) поставляются в составе ОС.
Драйвер платы сопряжения с мультиплексным каналом (F) поставляется вместе с платой (поз.29 фиг.1).
Драйвер платы радар-процессора (Р) разработан в составе ФПО прибора ЦП.
Программные модули (B, C, D, E, G, H, J, K, L, M, O, Q) разработаны в составе ФПО ЦП.
После подачи питания на прибор ЦП (поз.10 фиг.2) автоматически запускается программа ФПО, записанная во флэш-памяти процессорной платы 24. После полного запуска программы, в оперативном запоминающем устройстве (ОЗУ) на процессорной плате 24 запускаются процессы, показанные на фиг.3.
После появления на экране монитора 7 основного видеокадра интерфейса пользователя (см. фиг.4) и авторизации пользователя путем ввода пароля система полностью готова к работе.
Драйверы (A, F, I, N, P) осуществляют сопряжение аппаратных устройств соответствующих плат 25, 26, 29, 30, 28, 27 (см. фиг.2) с функциональным программным обеспечением процессорной платы 24.
Драйвер плат сопряжения с последовательными каналами (А) осуществляет первичное преобразование данных, поступающих от систем А2 (корабельная система единого времени), A3 (первая навигационная РЛС), А4 (вторая навигационная РЛС), А5 (корабельный метеокомплекс) (см. фиг.2) на входы 2, 3, и платы 25 сопряжения с последовательными каналами и входы 1, 2 второй платы 26 сопряжения с последовательными каналами.
Драйвер плат сопряжения с последовательными каналами (А) осуществляет передачу команд оператора на управление системой А1 (поворотное устройство электронно-опрического визира левого борта), осуществляемых со входа 2 первой платы сопряжения с последовательными каналами 25.
Драйвер плат сопряжения с последовательными каналами (А) осуществляет передачу информации через вход 1 первой платы сопряжения с последовательными каналами 25 на вход цифрового табло 11 навигационных параметров.
Драйвер платы сопряжения с мультиплексным каналом (F) осуществляет первичное преобразование данных, поступающих от системы навигационного комплекса (поз.А10, фиг.2) на первый и второй входы платы 29 сопряжения с мультиплексным каналом.
Драйвер платы сопряжения с локальной сетью (I) осуществляет преобразование данных, приходящих на плату-адаптер 30 локальной сети от коммутатора 32 локальной сети, а также преобразует данные, формируемые ФПО для передачи в коммутатор локальной сети, с выдачей служебных команд по поддержанию связи в соответствии с протоколом Ethernet.
Драйвер платы видеозахвата (N) осуществляет первичное преобразование данных, поступающих от систем А8 (электронно-оптический визир левого борта) и А9 электронно-оптический визир правого борта) на первый и второй входы платы 28 видеозахвата.
Драйвер платы радар-процессора осуществляет первичное преобразование данных, поступающих от систем А6 (первой навигационной РЛС) и А7 (второй навигационной РЛС) на первый и второй входы платы 27 радар-процессора.
Драйвер трекбола (R) служит для преобразования сигналов от органов управления трекбола в команды, принимаемые программным модулем «человек - машина» (Е).
Драйвер клавиатуры (S) служит для преобразования сигналов от органов управления клавиатуры в команды, принимаемые программным модулем «человек - машина» (Е).
Программный модуль работы с данными от последовательных каналов (В) - предназначен для преобразования данных, выдаваемых драйвером (А), в унифицированный формат шины данных (С).
Шина данных (С) обеспечивает единое информационное поле при обмене данными между различными процессами ФПО центрального прибора, между центральными приборами, а также передача информации в приборы УВ.
Программный модуль сопряжения с электронно-оптическим визиром (D) обеспечивает преобразование команд на управление поворотным устройством, формируемых в программном модуле «человек - машина» (Е), и передачу их в шину данных, передачу команд по приоритету управления поворотным устройством.
Программный модуль обработки данных от мультиплексных каналов (G) предназначен для преобразования данных, выдаваемых драйвером (F), в унифицированный формат шины данных (С) и наоборот.
Программный модуль выдачи информации на электронное табло навигационных параметров (H) служит для выделения из общего потока именованных данных, формируемых модулем (L), данных, предназначенных для отображения на цифровом табло 11 навигационных параметров и передачи их в шину данных (С) с адресом СОМ-портов модулей отображения цифрового табло 11 навигационных параметров.
Программный модуль приема данных от КСУ ТС (J) обеспечивает выделение данных, передаваемых от КСУ ТС, в принимаемом драйвером (I) общем потоке данных и преобразование их в унифицированный формат шины данных (С).
Программный модуль приема данных от ГАС ПДСС (К) осуществляет выделение данных, передаваемых от ГАС ПДСС, в принимаемом драйвером (I) общем потоке данных и преобразование их в унифицированный формат шины данных (С).
Программный модуль обработки данных видеоизображения (О) обеспечивает преобразование данных, выдаваемых драйвером (N), и передачу их модуль (Е) для отображения в окне графического интерфейса.
Модуль сортировки данных (мультиплексирования) (L) предназначен для обеспечения унификации преобразования информации между пакетным и прикладным уровнями данных.
В рассматриваемом примере реализована следующая схема взаимодействия программных модулей при обмене информации с сопрягаемыми системами корабля.
Вводится соглашение об именовании величин. А именно, для всех прикладных величин составляется единое правило их именования в рамках ИМС. Например:
и так далее Вводится пространство имен прикладных данных:
/<ДОМЕН>/<ВЕЛИЧИНА>
где
ДОМЕН - наименование прибора или сопрягаемой системы
ВЕЛИЧИНА - наименование одного из параметров вырабатываемого сопрягаемой системой
например:
/КОМПАС/hdt - курс корабля, выработанный компасом
/НАВ.КОМПЛЕКС/hdt - курс корабля, выработанный корабельным навигационным комплексом
ПО уровня именованных данных предоставляет следующие сервисы:
- чтение данных по имени
- публикация/подписка (publish/subscribe) на именованные данные.
- публикация с выходом на уровень ввода/вывода.
В модуле (L) производится мультиплексирование общего потока данных, сформированных в модуле (Q), с выделением данных, подлежащих отображению в соответствии с приоритетом, заданным оператором. Необходимость мультиплексирования вызвана тем, что в общем потоке данных имеются различные данные одних и тех же величин, полученные из разных источников. Таким образом, имеется необходимость определения приоритетов при текущем отображении данных. Например, оператором с помощью программного модуля «человек - машина» (Е) назначается основным источником данных для отображения текущих координат корабля основной канал навигационного комплекса (вход 1 платы 29 сопряжения с мультиплексным каналом), а резервным - источник данных от резервного канала навигационного комплекса 2 (вход 2 платы 29 сопряжения с мультиплексным каналом). Заданная оператором конфигурация передается по логической линии связи 43 в программный модуль (L). После этого при наличии данных от первого источника данные о текущих координатах в модуле навигации (фиг.4) всегда отображаются от первого источника. В случае разрыва связи по основному каналу и отсутствия соответствующих именованных данных в шине (С), программный модуль выбирает для приема координат второго источника. Процедура «подписки» на данные осуществляется по логическому каналу связи 45. Принимаемые по текущей «подписке» данные передаются для последующего отображения в программный модуль (Е) по логическому каналу связи 44 и в программный модуль (Н) по логическому каналу связи 42.
Программный модуль обмена информацией с локальной шиной данных (Q) обеспечивает организацию общего механизма ввода-вывода информации, поступающей в шину данных (С) и передаваемой из шины данных.
Другая функция модуля (Q) - контроль наличия данных в шине (С). Функция реализована с помощью внутреннего тайминга, выдающего сигнал отсутствия/появления данных в шине в течение определенного времени (5 сек). Состав контролируемых данных и время реакции задаются один раз при конфигурации системы. В случае прерывания поступления каких-либо контролируемых данных в течение периода времени, превышающего заданный, по логической линии связи 47 в программный модуль взаимодействия «человек - машина» (Е) поступает сигнал отсутствия данных. Программный модуль взаимодействия «человек - машина» (Е) формирует сообщение в окне модуля текстовых сообщений (фиг.4) следующего содержания «Время XX час XX мин - нет связи с системой XXX» и передает его по логической линии связи 44 для отображения на мониторе (поз.29 фиг.2).
При возобновлении поступления данных от системы XXX программный модуль взаимодействия «человек - машина» (Е) формирует сообщение в окне модуля текстовых сообщений (фиг.4) следующего содержания «Время XX час XX мин - есть связь с системой XXX» и передает его по логической линии связи 26) для отображения на мониторе (поз.29 фиг.2).
После обработки данных в модуле (Q) они поступают в программный модуль мультиплексирования (L) по логической линии связи 46.
Обеспечение возможности выбора состава и характеристик контролируемой информации осуществляется с помощью программного модуля взаимодействия «человек - машина» (Е), выполненного с возможностью:
1. Формирования изображения на экране монитора.
2. Осуществления команд управления путем интерпретации действий оператора с трекболом и мышью, с отображением изменений в графическом интерфейсе. Команды связаны с выбором текущих источников информации путем нажатия виртуальных кнопок модуля «Средства наблюдения и планшет» (фиг.4), управлением поворотных устройств электронно-оптических визиров.
3. Ввода предельных значений для параметров, отображаемых в модулях «Навигация» и «Метео» (фиг.4), для активизации звуковой сигнализации в случае их превышения.
4. Обеспечения установки приоритетов источников информации в программном модуле (L) по логической линии связи 43.
Внешний вид основных информационных полей интерфейса пользователя (модуль N на фиг.3) показан на фиг.4.
Корабельная интегрированная мостиковая система (ИМС) работает следующим образом (фиг.1).
После подачи питания на ИМС и пультовые секции, образующие автоматизированные рабочие места командира и вахтенного офицера, производится выполнение центральными приборами 10 и 21 процедур самотестирования и процедур тестирования подключенных к ним устройств, после чего ИМС начинает принимать данные от сопряженных с ней корабельных систем (системы единого времени, первой и второй навигационной РЛС, корабельного метеокомплекса, электронно-оптического визира правого борта, электронно-оптического визира левого борта, навигационного комплекса, ГАС ПДСС, КСУ ТС), а также команды и данные, вводимые пользователем при помощи клавиатур 8 и 19 и трекболов 9, 20. Полученные данные отображаются на мониторах 7 и 18. Пользователи на основании представленных данных получают информацию:
- о внешней обстановке вокруг корабля (погодные условия, наличие других судов и кораблей, представляющих возможную опасность для кораблевождения), о текущих навигационных параметрах (координаты, курс, скорость, глубина под килем, значение текущего крена и дифферента), о текущем времени и принимают решения по управлению кораблем с целью обеспечения его безопасности при выполнении задач корабля при нахождении в море;
- по аварийным ситуациям на корабле (пожар, поступление воды) и принимают решения по борьбе с аварийными ситуациями;
- о наличии в радиусе действия ГАС ПДСС подводных диверсионных сил и средств противника и принимают решения по отражению атаки.
Информация, принимаемая ЦП от сопрягаемых систем, транслируется в локальную шину данных ИМС, реализованную на двух коммутаторах локальной сети (5 и 16).
Локальная шина данных ИМС обеспечивает резервирование получения информации центральными приборами от основных и резервных каналов сопрягаемых систем, выдачу навигационной информации (координаты, курс, скорость, глубина под килем, время), формуляров целей (пеленг и дистанция до цели) и первичной радиолокационной информации (ПРЛИ) в первое и второе устройства 4 и 15 вычислительные (УВ).
Включение первого и второго УВ производится одновременно с включением центральных приборов после подачи питания на ИМС и автоматизированные рабочие места командира и вахтенного офицера. После выполнения процедур самотестирования и процедур тестирования подключенных к ним устройств, первое и второе УВ начинают принимать из локальной шины данных ИМС от коммутаторов 5 и 16 информацию по текущим координатам, курсу, скорости, глубине под килем, времени), формулярам целей и ПРЛИ. Полученные данные отображаются на мониторах 1 и 12, вместе с отображением электронной навигационной карты, воспроизводимой из базы данных электронных карт, хранящейся в УВ. Пользователи на основании представленных данных получают информацию о текущем положении корабля на фоне навигационной карты, о навигационной безопасности плавания по проложенному маршруту, а также о положении других надводных целей, что обеспечивает принятие решений по безопасному управлению кораблем.
Ввод команд пользователей в УВ осуществляется с помощью клавиатур 2 и 13 и трекболов 3 и 14.
Таким образом, предлагаемая корабельная интегрированная мостиковая система обладает универсальностью, широкими функциональными возможностями и повышенной надежностью функционирования и отказоустойчивостью. Корабельная интегрированная мостиковая система позволяет наращивать функциональные возможности за счет установки дополнительных плат сопряжения в центральные приборы, а также подключения дополнительных преобразующих устройств, что позволит расширить состав сопрягаемых корабельных систем.
Источники информации
1. Патент РФ на изобретение №2163392, кл. МПК G06F 15/16, 2000 г.
2. Патент РФ на полезную модель №41382, кл. МПК G06F 15/16, 2004 г.
3. Сайт Российской группы компаний Транзас (г.Санкт-Петербург) в сети Интернет: http://www.transas.ru/products/onboard/produce/ins/ibs/structure/
4. Патент РФ на изобретение №2260191, кл. МПК G01S 7/08, 2004 г.
5. Патент РФ на полезную модель №4395, кл. МПК G06F 15/16, 1997 г.
6. Патент РФ на полезную модель №27871, кл. МПК G06F 15/16, 2002 г.
7. Патент РФ на полезную модель №51248, кл. МПК G06F 15/16, 2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная система навигации кораблей и судов обеспечения Военно-Морского Флота | 2020 |
|
RU2765606C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ОБРАБОТКИ СУДОВОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2010 |
|
RU2444782C2 |
| МНОГОУРОВНЕВАЯ МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2009 |
|
RU2406125C1 |
| Система обработки радиолокационной информации | 2023 |
|
RU2815274C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2007 |
|
RU2340950C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| КОМПЛЕКС СВЯЗИ ПОДВИЖНОГО ОБЪЕКТА, СОДЕРЖАЩИЙ АВИАЦИОННЫЙ ТЕРМИНАЛ | 2022 |
|
RU2791279C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
Изобретение относится к вычислительной технике, а в частности к управляющей системе, предназначенной для сбора информации от корабельных систем и комплексного представления информации на мониторах, а также для управления поворотными устройствами электронно-оптических визиров. Технический результат - повышение отказоустойчивости и надежности функционирования. Корабельная интегрированная мостиковая система выполнена многосекционной, содержащей набор пультовых секций основного и резервного контура, состоящих из комплекса функционально объединенных аппаратно-программных средств и модулей, связанных между собой по основному и резервному каналам локальной сети и включающих, по меньшей мере, по две пультовые секции, содержащие связанные между собой по стандартным интерфейсам связи монитор, клавиатуру, манипулятор и общую секцию системы питания, конструктивно объединенных в интегрированный пульт, причем одна из пультовых секций основного и резервного контуров содержит устройство вычислительное электронной картографической системы, а вторая пультовая секция содержит центральный прибор, причем центральные приборы основного и резервного контуров соединены между собой по резервному каналу локальной сети, а один из выходов соединен с выделенным цифровым табло навигационных параметров. 4 з.п. ф-лы, 4 ил.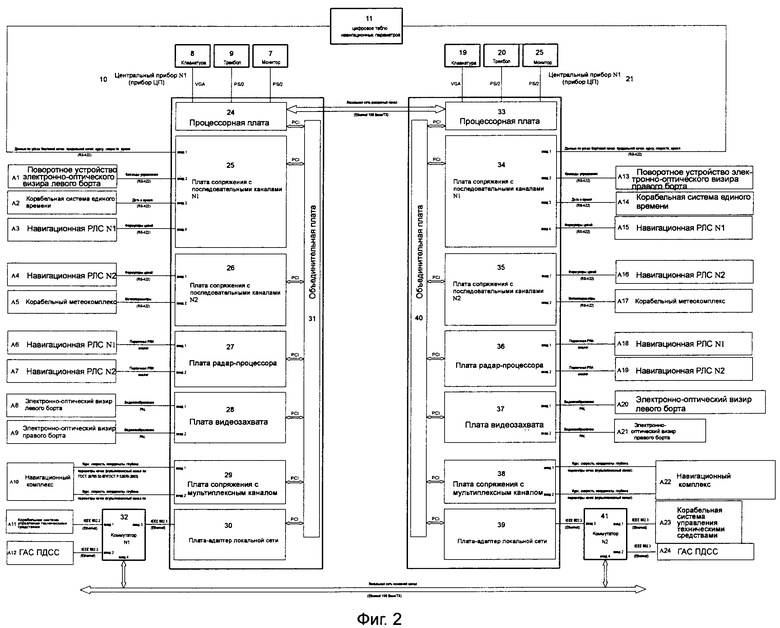
1. Корабельная интегрированная мостиковая система, содержащая пульт управления с устройством отображения информации, соединенная с основным и резервным контурами сопряжения с корабельными обеспечивающими системами, в каждый из которых включены объединенные между собой внутренней интерфейсной магистралью центральный процессор, модуль мультиплексных каналов обмена, адаптер локальной вычислительной сети, модуль-коммутатор локальной вычислительной сети, причем сетевые входы-выходы платы-адаптера локальной вычислительной сети каждого из контуров сопряжения подключены соответственно ко входам модулей коммутаторов локальной вычислительной сети своего и параллельного контуров сопряжения, внешние сетевые входы-выходы модулей коммутаторов локальной вычислительной сети основного и резервного контуров сопряжения подключены к основным и устройствам корабельной системы управления, отличающаяся тем, что выполнена многосекционной, содержащей набор пультовых секций основного и резервного контура, состоящих из комплекса функционально объединенных аппаратно-программных средств и модулей, связанных между собой по основному и резервному каналам локальной сети и включающих, по меньшей мере, по две пультовые секции, подключенные к сопрягаемым внешним корабельным системам, и общую секцию системы питания, конструктивно объединенных в интегрированный пульт, причем одна из пультовых секций основного и резервного контуров содержит связанные между собой по стандартным интерфейсам связи монитор, клавиатуру, манипулятор и устройство вычислительное (УВ) электронной картографической системы, выполненное с обеспечением возможности вывода и отображения на мониторе текущей информации об основных навигационных параметрах, а также содержит коммутатор локальной сети, выполненный с обеспечением возможности сопряжения с внешними корабельными системами и устройство распределения электропитания, вход которого связан с общей секцией системы питания, а выходы соединены со входами всех модулей обеих пультовых секций, при этом вторая пультовая секция в каждом из основного и резервного контуров содержит связанные между собой по стандартным интерфейсам связи монитор, клавиатуру, манипулятор и центральный прибор, входы-выходы которого выполнены с обеспечением возможности сопряжения с вешними корабельными системами, сбора, передачи и вывода на монитор информации, по меньшей мере, о состоянии судового оборудования, причем центральные приборы основного и резервного контуров соединены между собой по резервному каналу локальной сети, а один из выходов соединен с выделенным цифровым табло навигационных параметров.
2. Система по п.1, отличающаяся тем, что центральный прибор состоит из процессорной платы, по меньшей мере, двух плат сопряжения с последовательными каналами, выполненных с обеспечением возможности передачи данных на цифровое табло навигационных параметров через выход, передачу команд управления на поворотное устройство электронно-оптического визира, прием данных от корабельной системы единого времени и прием формуляров целей (значения пеленга на цель и дистанции до цели) от навигационной радиолокационной станции, приема данных по формулярам целей от НРЛС, а также прием данных от корабельного метеокомплекса, включающего, по меньшей мере, набор данных о текущем значении истинного ветра, текущем значении кажущегося ветра, давлении воздуха, температуре воздуха, влажности воздуха, высоте облаков и видимости, платы радар-процессора, выполненной с обеспечением возможности приема первичной радиолокационной информации, платы видеозахвата, выполненной с обеспечением возможности приема видеоизображения от электронного визира левого и правого борта, платы сопряжения с мультиплексным каналом, выполненной с обеспечением возможности приема навигационных данных, включающего, по меньшей мере, набор данных о текущем значении курса, скорости, координат, глубины под килем, значения бортовой качки и килевой качки, от навигационного комплекса по основному и резервному каналам, платы-адаптера локальной сети и объединительной платы.
3. Система по п.1, отличающаяся тем, что пультовые секции интегрированного пульта сопряжены, по меньшей мере, с одной навигационной радиолокационной станцией, системой автоматизированной автопрокладки, оптико-электронными системами видеонаблюдения, навигационного комплекса и/или некомплексированных навигационных приборов, метеокомплексом, гидроакустической станцией, корабельной системой управления техническими средствами, с обеспечением возможности сбора, передачи и отображения текущей информации от сопряженных систем на мониторах пультовых секций и цифровом табло навигационных параметров.
4. Система по п.1, отличающаяся тем, что основной и резервные контуры выполнены с симметричной схемой вычислительных средств и содержат идентичный набор пультовых секций в каждом из контуров, с обеспечением возможности вывода на мониторы пультовых секций основного и резервного контура информации по выбору оператора, осуществляемому раздельно на каждой пультовой секции, программно-аппаратным образом.
5. Система по п.1, отличающаяся тем, что цифровое табло навигационных параметров выполнено в виде выносного устройства с устройством отображения информации, выполненным с гибкоперестраиваемым монитором с сенсорным и/или аппаратным управлением, с возможностью отображения информации от любой пультовой секции основного или резервного контура, а также сопрягаемых корабельных систем по выбору оператора цифрового табло навигационных параметров.
| Прибор маятникового типа для сигнализирования о поперечных колебаниях единиц подвижного состава | 1936 |
|
SU51248A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для отжига металлических лент в электрической печи | 1929 |
|
SU25618A1 |

