Изобретение позволяет обеспечить оперативное управление оборудованием подвижного объекта.
В качестве подвижного объекта рассматривается любой современный летательный аппарат (ЛА), где проблема оперативного управления комплексом бортового оборудования (КБО) и различными типами авиационных средств поражения (АСП) стоит особенно остро.
В современных ЛА, оснащенных многочисленными обзорно-прицельными средствами (ОПС), обеспечивающих применение широкой номенклатуры АСП и выполняющих различные режимы их доставки, в кабине установлены многочисленные органы управления (ОУ), реализующие управление этими системами и режимами на фоне управления ЛА.
Для управления ЛА используются рукоятка управления положением летательным аппаратом (РУС) и рукоятка управления двигателем (РУД), а для управления КБО и АСП органы управления на боковых, в ряде случаев на центральном, пультах кабины. В ЛА последних поколений эти ОУ располагаются на кнопочном обрамлении экранов индикаторов.
Таким образом, для управления КБО и АСП оператору необходимо снять руки с ОУ ЛА, тем самым теряя контроль над ЛА. При этом необходимо отметить, что время активирования ОУ, расположенного на борту или приборной доске в кабине в несколько раз больше по времени, чем нажатие ОУ на рукоятках управления. Кроме того процедура управления КБО и АСП зачастую осложняется проблемой досягаемости до этих ОУ.
Для минимизации негативных последствий данной ситуации на всех современных ЛА на РУС и РУД устанавливаются ОУ для выдачи наиболее важных и оперативных команд управления КБО и АСП. Количество команд управления ограниченно, так как установка большого количества ОУ на РУС и РУД, приводит к увеличению размеров рукояток, затруднениям в работе с этими ОУ и возрастанию ошибочных действий летчика, особенно на экстремальных режимах и при боевом применении.
Таким образом, раздельное управление КБО и ЛА, когда при управлении КБО теряется контроль над ЛА, приводит к снижению боевой эффективности военных ЛА, особенно в дуэльных ситуациях, а также к росту предпосылок летных происшествий.
Известен «Автоматизированный способ дистанционного управления бортовым комплексом и системами ЛА» (патент RU №2137678, МПК: В64С 13/18, пр. 23.03.1998). Изобретение относится к авиации и может быть использовано для дистанционного управления оператором бортовым комплексом и системами ЛА (без отрыва рук от рычагов управления ЛА). В процессе управления оператору непрерывно «подсказываются» действия в соответствии с заранее запрограммированной иерархической последовательностью их выполнения. Для перевыбора запрограммированных ранее действий используется подвижный маркер, дистанционно перемещаемый по знакоместам обозначения многофункциональных кнопок на экране нажатием на переключатель «перевыбор» в стороны (влево, вправо, вверх, вниз) или с циклическим перебором функции многофункциональной кнопки нажатием на переключатель «перевыбор» прямо. В случае согласия с рекомендованными или ранее перевыбранными летчиком действиями для их исполнения он нажимает отдельную кнопку «согласие». Повышается производительность, точность, рациональность и безошибочность действий летчика, а также повышается точность пилотирования и безопасность полета в целом.
Для нажатия многофункциональной кнопки на периферии индикатора оператор снимает руку с рычага. Циклический перебор большого числа функций на экране индикатора требует высокой концентрации внимания оператора и, как следствие, чреват запаздыванием и ошибками управления, что ограничивает возможность использования способа.
Наиболее близким техническим решением к заявляемому является «Способ и система управления» (патент № RU 2240956, МПК: В64С 13/00, пр. 25.07.2002) в соответствии с которыми функционирование и режимы работы управляемых систем изменяют воздействием на многофункциональные тактильные органы, которые расположены на комплексных органах управления под кистями рук оператора. Амплитуда движения рук при этом незначительна. Изменение функций многофункциональных тактильных органов определяется воздействием оператора на тактильные переключатели. ЭВМ формирует команды на средства непосредственного управления системами, расположенные вне рабочего места оператора. Средства непосредственного управления бортовыми системами через их соответствующие вычислительно-логические элементы электрически связаны с пультовыми тактильными органами неоперативного управления. После отображения на визуальном индикаторе схематических изображений многофункциональных органов с видеоинформацией о возможных функциях этих органов при определении задачи или ситуации управления, вариантов функционирования и режимов работы управляемых систем поочередно воздействуют пальцами рук оператора на тактильные переключатели и многофункциональные тактильные органы до завершения настройки управляемых систем на требуемые варианты их функционирования и режимы работы. При этом руководствуются видеоинформацией об изменяемых положении и функциях многофункциональных тактильных органов. Система обеспечивает повышенную надежность, удобство и комфортность управления.
Функциональное назначение многофункциональных органов управления на РУС и РУД по патенту RU №2240956 определяется воздействием оператора на ОУ, размещенные в кабине оператора, для чего ему необходимо снимать руки с рукояток управления летательным аппаратом и двигателем. В ряде случаев ОУ могут находиться вне пределов легкой функциональной досягаемости, что затрудняет работу оператора при выполнении данных операций. При этом оператор отвлекается от обзора окружающей обстановки и теряет контроль над объектом.
Система управления по патенту RU №2240956 не может обеспечить управление сложными многофункциональными объектами, так как количество задач в каждом режиме работы не может быть более шести.
Это определено логикой работы многофункциональных ОУ. После выбора одной задачи многофункциональные ОУ автоматически переходят на управление этой задачей.
Задание числового значения параметра требует большого количества операций и значительных временных затрат, т.к. каждая цифра выбирается из перечня цифр с необходимостью фиксации каждой выбранной цифры.
На двухпозиционный переключатель на РУД оператор воздействует безымянным пальцем левой руки, что крайне неудобно и противоречит требованиям эргономики. В соответствии с ГОСТ 22614-77 воздействие на ОУ должно осуществляться большим и указательным пальцами рук оператора.
Задачей заявляемого изобретения является обеспечение оперативного управления оборудованием подвижного объекта.
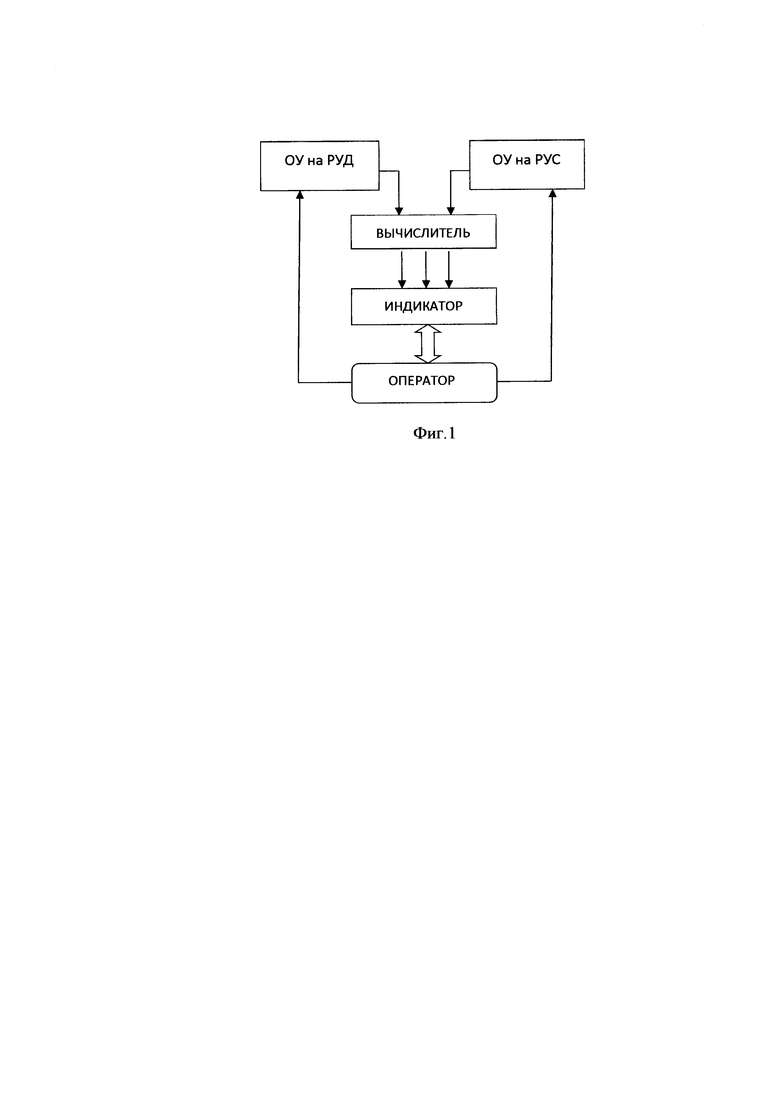
Для решения поставленной задачи предложена система оперативного управления оборудованием подвижного объекта, позволяющая осуществлять все действия по управлению без отрыва рук от рукояток управления подвижным объектом. Система включает в себя четырехпозиционный переключатель с осевым нажатием (4ПП-правый), установленный на рукоятке управления положением подвижного объекта и четырехпозиционный переключатель с осевым нажатием (4ПП-левый), установленный на рукоятке управления двигателем под правую и левую руку оператора соответственно, экран индикатора, информирующий о функциональном назначении обоих 4ПП и результатах действий оператора по управлению, вычислитель, который придает обоим 4ПП функции выбора задач управления оборудованием подвижного объекта и после выбора требуемой задачи по нажатию центральной кнопки любого 4ПП придает обоим 4ПП функции задания команд управления выбранной задачи, а после завершения решения задачи нажатием центральной кнопки любого 4ПП возвращает оба 4ПП к выбору следующей задачи управления, формируя при этом на экране индикатора информацию о текущем функциональном назначении обоих 4ПП и результатах управления.
В случае, когда оборудование подвижного объекта имеет сложную структуру, где количество задач управления велико, формируется два блока задач, для чего меняется назначение центральных кнопок обоих 4ПП, где при нажатии центральной кнопки 4ПП-правый осуществляется переход от задач к командам управления выбранной задачи и вновь осуществляется переход от команд управления к перечню задач по нажатию центральной кнопки 4ПП-правый, а при нажатии центральной кнопки 4ПП - левый осуществляется переход от одного блока задач к другому и обратно при повторном нажатии центральной кнопки 4ПП-левый.
На рукоятке управления двигателем расположена кнопка переключения режимов управления, которая нажимается и удерживается в нажатом состоянии в случае, если при решении ранее выбранной задачи требуется подача команды из перечня команд другой задачи, по сигналу с этой кнопки 4ПП-правый приобретает функции задания наиболее используемых команд, после выбора которых, кнопка переключения режимов управления отпускается и оба 4ПП приобретают функции, которые были до нажатия кнопки переключения режимов управления. На рукоятке управления двигателем расположена кнопка переключения режимов управления и кнопка фиксации действий оператора, на рукоятке управления положением подвижного объекта установлена кнопка отмены действий оператора и в случае, когда в вычислитель поступает сигнал от нажатой кнопки переключения режимов управления, то вычислитель придает обоим 4ПП функции наборного поля, а кнопкам в обрамлении индикатора присваивает индицируемый на экране двухзначный цифровой код, при наборе которого с использованием двух 4ПП, аббревиатура кнопки обозначается рамкой, которая работает в проблесковом режиме и после нажатия кнопки фиксации действий оператора, кнопка в обрамлении индикатора активируется, а при ошибочном наборе цифрового кода, он сбрасывается нажатием кнопки отмены действий оператора, при повторном нажатии кнопки переключения режимов управления оба 4ПП приобретают функции оперативного управления оборудованием подвижного объекта.
Применительно к подвижному объекту типа ЛА система позволяет обеспечить управление КБО и применение всех видов АСП без снятия рук с РУС и РУД.
Сущность предлагаемого изобретения поясняется чертежами:
Фигура 1 - структура предлагаемой системы оперативного управления КБО и АСП.
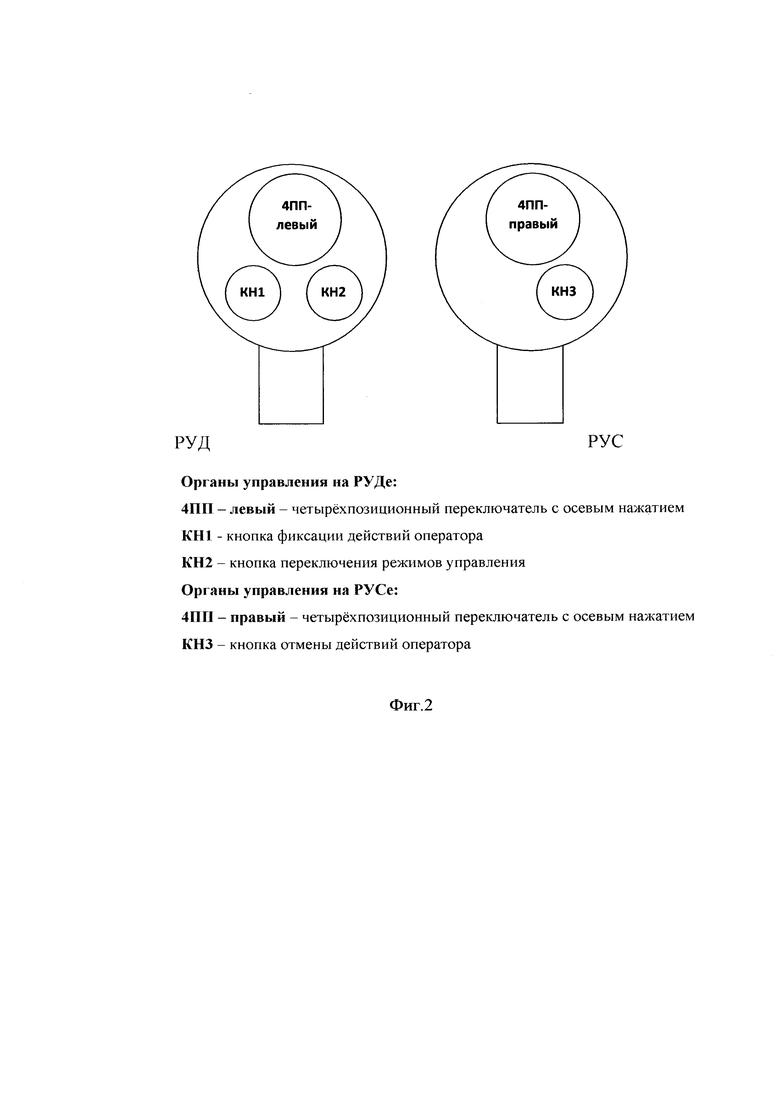
Фигура 2 - РУД и РУС с расположенными на них ОУ.
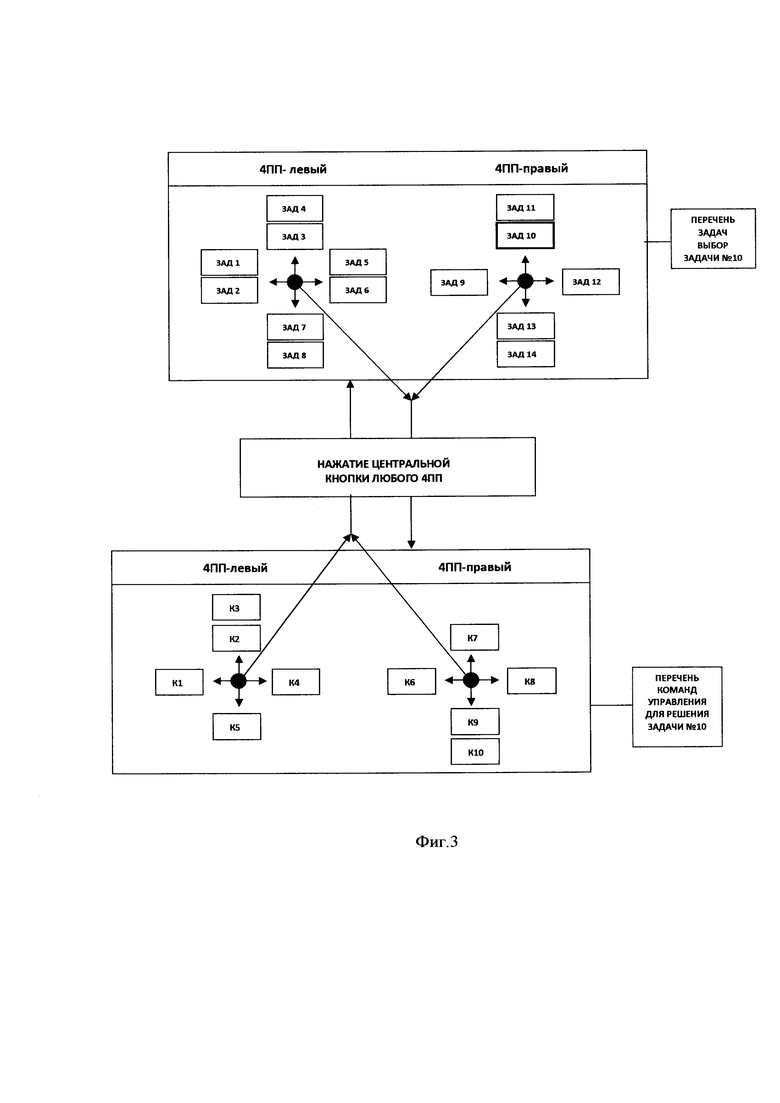
Фигура 3 - схема перехода двух 4ПП на задание команд для предварительно выбранной задачи.
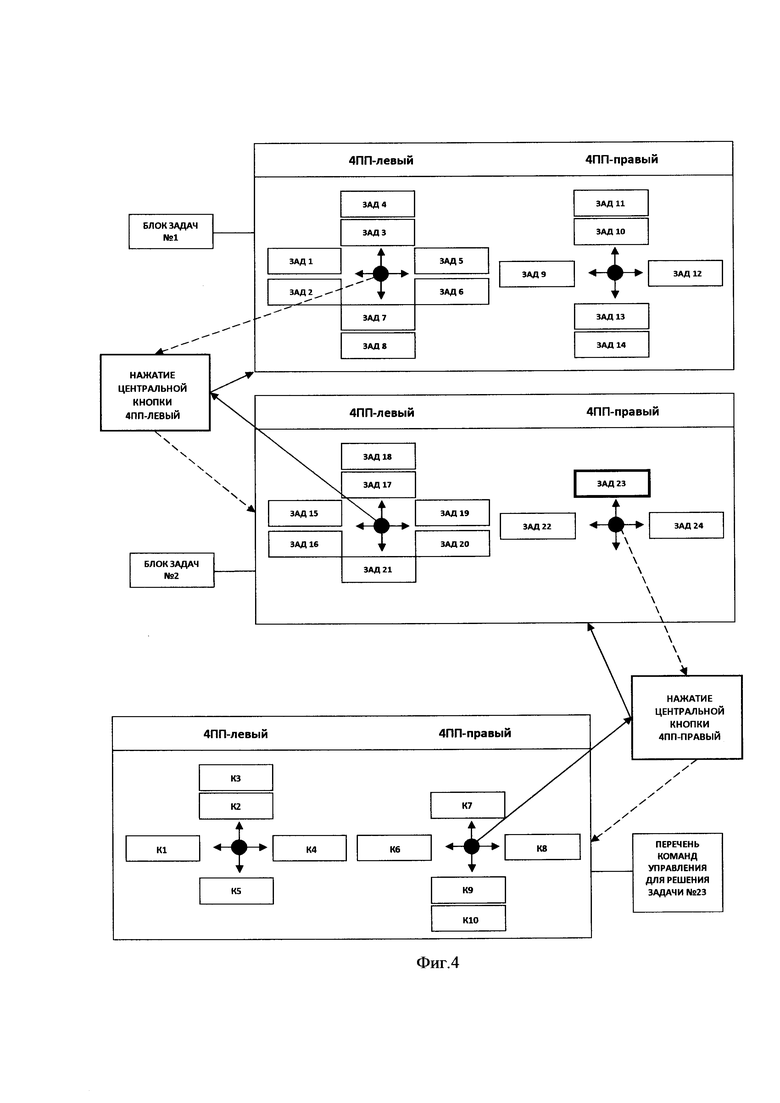
Фигура 4 - схема использования двух блоков задач.
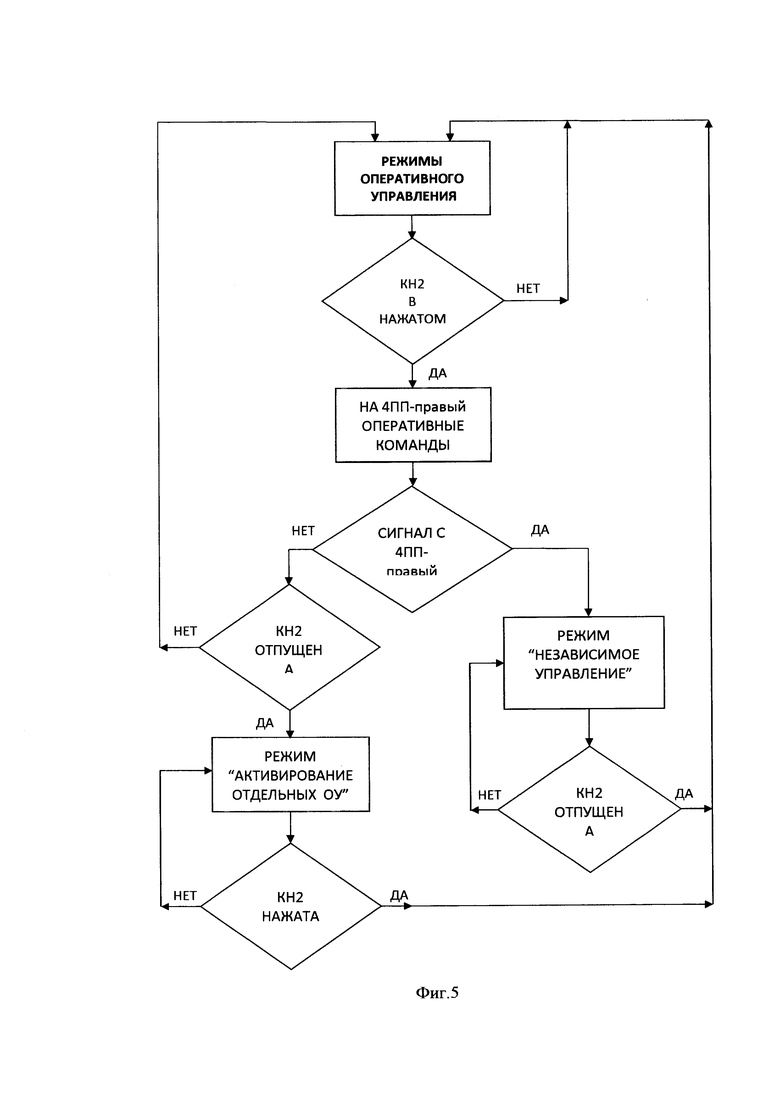
Фигура 5 - схема переключения режимов оперативного управления.
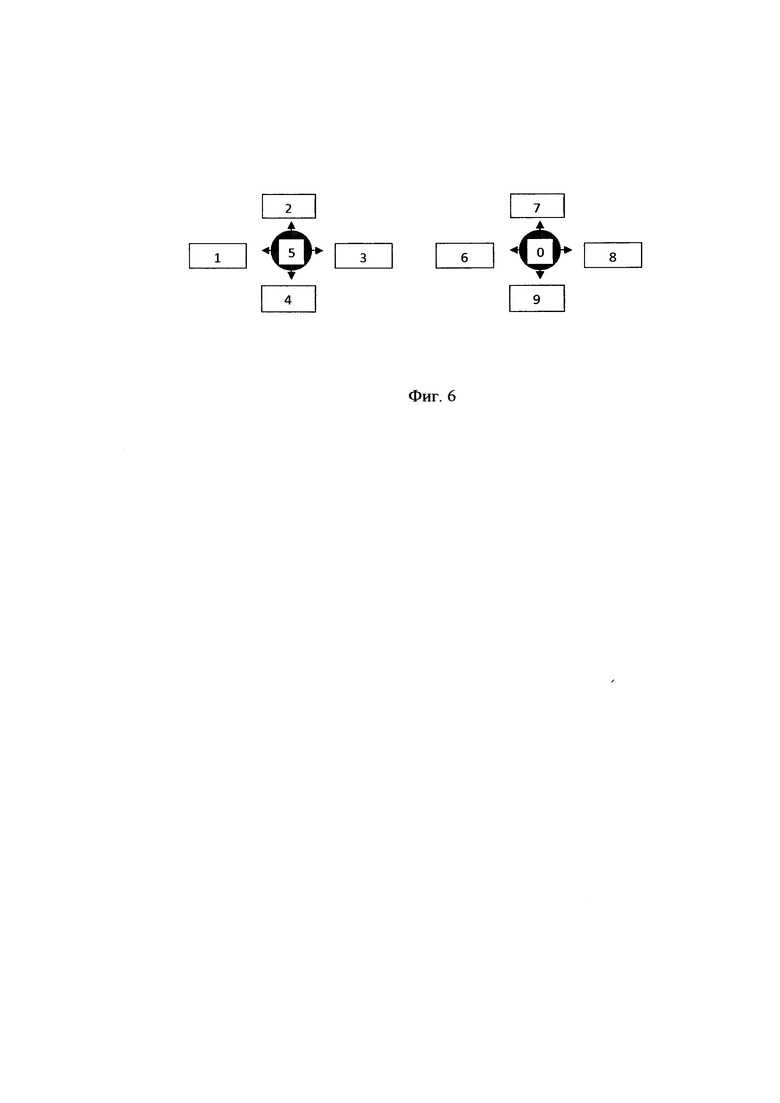
Фигура 6 - реализация на обоих 4ПП наборного поля для задания цифрового кода органа управления в кнопочном обрамлении индикатора. Режим управления - "активирование отдельных ОУ".
Система оперативного управления КБО ЛА и АСП работает следующим образом.
На экране индикатора высвечиваются два графических объекта в виде прямоугольного креста, каждый со стрелками на концах, которые указывают направление движения исполнительного элемента (ИЭ) каждого 4ПП.
Над каждой стрелкой изображаются названия задач, определяющих управление КБО и АСП.
Двигая ИЭ 4ПП по направлению, указанному стрелкой, оператор перемещает рамку выбора, выбирая тем самым необходимую для решения в данный момент задачу.
При движении ИЭ и его контакта с концевым переключателем сигнал с концевого переключателя 4ПП поступает в вычислитель, где, в соответствии с моделью каждого 4ПП, формируется положение рамки выбора.
При последовательном нажатии на ИЭ в одном направлении перемещение рамки выбора осуществляется по круговой схеме. После выбора последней задачи в данном ряду, следующее нажатие возвращает рамку выбора на первую задачу в данном ряду. Выбор задач в каждом направлении осуществляется по принципу работы галетного переключателя, что обеспечивает выбор только одной задачи.
После выбора необходимой задачи оператор нажимает центральную кнопку любого 4ПП. Этот сигнал поступает в вычислитель, где каждой задаче поставлены в соответствие перечень команд решения этой задачи.
После нажатия центральной кнопки любого 4ПП оба 4ПП приобретают функции выбора этих команд.
На экране индикатора высвечивается изображение двух 4ПП с перечнем команд.
Оператор движением ИЭ 4ПП перемещает рамку выбора по ряду команд в каждом направлении. Выбор команд проводится так же, как и выбор задач по принципу работы галетного переключателя, что позволяет выбрать в каждом направлении одну команду, которая определяется последним нажатием ИЭ.
Команды, созданной модели решения задачи, поступают в вычислитель и после преобразования транслируются в системы, управляемые вычислителем.
Таким образом, осуществляется выбор решаемой задачи, а далее подбор соответствующего ей набора команд. На Фиг. 3 схематично показан пример перехода от выбранной задачи на команды управления для данной задачи.
Повторное нажатие центральной кнопки любого 4ПП поступает в вычислитель, который вновь формирует на экране индикатора изображение 4ПП с перечнем задач.
В случае управления сложными по своей структуре комплексами, где необходимо решение большого количества задач, реализуется использование двух блоков задач. При этом меняются функции центральных кнопок 4ПП.
По нажатию центральной кнопки 4ПП-левый, сигнал от нее поступает в вычислитель, который меняет функциональное назначение двух 4ПП, обеспечивая выбор задач управления из второго блока задач. На индикаторе появляется изображение двух 4ПП с новым перечнем задач.
Нажатие центральной кнопки 4ПП-правый осуществляет переход от задачи, выбранной из любого блока задач, к командам управления, выбранной задачи и обратно, при повторном нажатии центральной кнопки 4ПП-правый (Фиг. 4).
Возможны ситуации, когда оператор занят процессом выбора команд для решения текущей задачи, а необходимость требует подать команду из перечня команд другой задачи.
Чтобы избежать многоуровневого пути решения этой проблемы, включающего выход из решаемой задачи путем назначения другой задачи, выдачу необходимой команды; возврат к решению первоначальной задачи, предлагается режим управления - "независимое управление" (Фиг. 5).
Перечень команд, которые подаются независимо от решаемой задачи, как правило, невелик и обычно заранее предполагается.
Режим "независимое управление" реализуется следующим образом. Оператор на РУД нажимает и удерживает в нажатом состоянии кнопку переключения режимов управления. Этот сигнал поступает в вычислитель, в котором формируется новое функциональное назначение 4ПП-правый, отображаемое на экране индикатора. Это новое назначение 4ПП-правый включает ряд наиболее востребованных команд, подача которых требует оперативности.
После выбора необходимых команд, оператор отпускает кнопку переключения режимов управления. По этому сигналу фиксируются и подаются в вычислитель выбранные команды, а функциональное состояние 4ПП-правый и 4ПП-левый возвращается к тому, которое было до нажатия кнопки переключения режимов управления.
В случае необходимости активировать ОУ в кнопочном обрамлении индикатора из числа ОУ, не принадлежащих к одной системе или режиму, а являющихся набором отдельных, не связанных между собой ОУ, вводится режим управления - "активирование отдельных ОУ" (Фиг. 5). Этот режим реализуется следующим образом. При кратковременном нажатии кнопки переключения режимов управления оба 4ПП выходят из режима оперативного управления КБО и АСП и на них реализуется наборное поле (Фиг. 6). На экране индикатора отображается новое назначение обоих 4ПП, а кнопки в обрамлении индикатора получают цифровой код, который индицируется на экране рядом с кнопкой.
После набора оператором цифрового кода, аббревиатура кнопки обозначается рамкой, которая работает в проблесковом режиме. Если код набран правильно и выбрана необходимая кнопка, оператор нажимает кнопку фиксации действий оператора на РУД. Обрамление аббревиатуры кнопки загорается постоянным светом и команда от данной кнопки поступает в вычислитель.
При ошибочном наборе цифрового кода, он сбрасывается нажатием кнопки отмены действий оператора. При повторном нажатии кнопки переключения режимов управления оба 4ПП приобретают функции оперативного управления КБО ЛА и АСП.
Реализация системы оперативного управления оборудованием подвижного объекта позволяет:
- обеспечить управление структурно сложных комплексов оборудования без снятия рук оператора с рукояток управления подвижного объекта;
- реализовать различные способы оперативного управления в зависимости от ситуации;
- повысить оперативность управления оборудованием подвижного объекта за счет минимизации переноса рук, использования режима "независимого управления", наличия понятного названия команд и простого алгоритма управления;
- обеспечить управление сложными комплексами, формируя порядка 20-30 задач, даже при одном блоке задач, выбор которых осуществляется без использования отдельных внешних переключателей, не входящих в состав системы;
- обеспечить воздействие на оперативные ОУ большим и указательным пальцами левой и правой рук без применения других пальцев, что соответствует требованиям эргономики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БОРТОВЫМ ОБОРУДОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2828758C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2240956C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОФУНКЦИОНАЛЬНЫМ ИНДИКАТОРОМ | 2002 |
|
RU2235355C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ БОРТОВЫМ КОМПЛЕКСОМ И СИСТЕМАМИ ЛА | 1998 |
|
RU2137678C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЭЛЕКТРОННОЙ ИНДИКАЦИИ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2219108C1 |
Система оперативного управления оборудованием подвижного объекта содержит два четырехпозиционных переключателя с осевым нажатием (4ПП), один из которых установлен на рукоятке управления положением подвижного объекта, а другой – на рукоятке управления двигателем под правую и левую руку соответственно, экран индикатора, вычислитель, выполненная с возможностью выбора задач управления оборудованием подвижного объекта и выполнения их с помощью соответствующих 4ПП. Обеспечивается повышение оперативности управления без отрыва рук от рукояток управления. 3 з.п. ф-лы, 6 ил.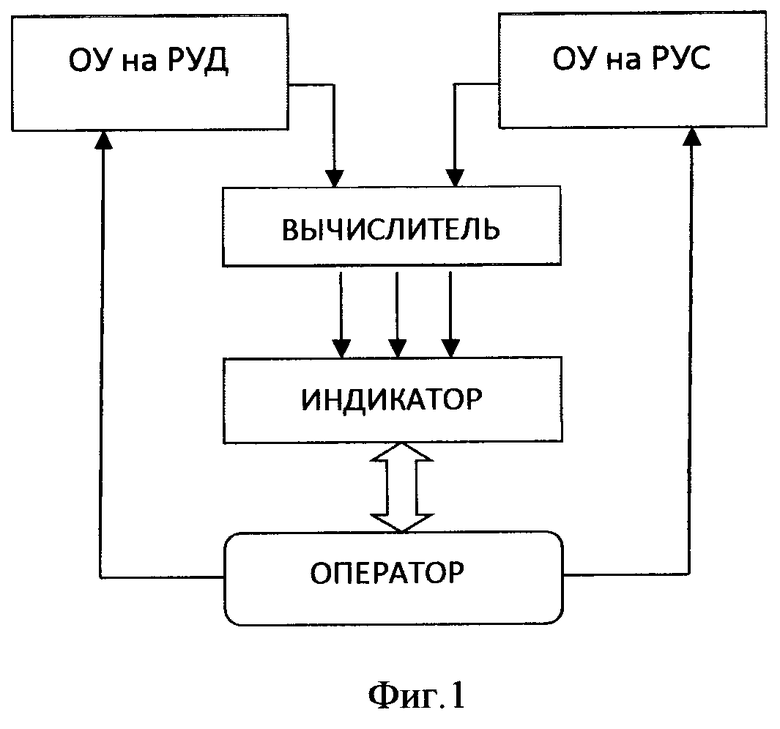
1. Система оперативного управления оборудованием подвижного объекта, позволяющая осуществлять все действия по управлению без отрыва рук от рукояток управления подвижным объектом, отличающаяся тем, что система включает в себя четырехпозиционный переключатель с осевым нажатием (4ПП-правый), установленный на рукоятке управления положением подвижного объекта и четырехпозиционный переключатель с осевым нажатием (4ПП-левый), установленный на рукоятке управления двигателем под правую и левую руку оператора соответственно, экран индикатора, информирующий о функциональном назначении обоих 4ПП и результатах действий оператора по управлению, вычислитель, который придает обоим 4ПП функции выбора задач управления оборудованием подвижного объекта и после выбора требуемой задачи по нажатию центральной кнопки любого 4ПП придает обоим 4ПП функции задания команд управления выбранной задачи, а после завершения решения задачи нажатием центральной кнопки любого 4ПП возвращает оба 4ПП к выбору следующей задачи управления, формируя при этом на экране индикатора информацию о текущем функциональном назначении обоих 4ПП и результатах управления.
2. Система по п. 1, отличающаяся тем, что в случае, когда оборудование подвижного объекта имеет сложную структуру, где количество задач управления велико, формируется два блока задач, для чего меняется назначение центральных кнопок обоих 4ПП, где при нажатии центральной кнопки 4ПП-правый осуществляется переход от задач к командам управления выбранной задачи и вновь осуществляется переход от команд управления к перечню задач по нажатию центральной кнопки 4ПП-правый, а при нажатии центральной кнопки 4ПП-левый осуществляется переход от одного блока задач к другому и обратно при повторном нажатии центральной кнопки 4ПП-левый.
3. Система по п. 1, отличающаяся тем, что на рукоятке управления двигателем расположена кнопка переключения режимов управления, которая нажимается и удерживается в нажатом состоянии в случае, если при решении ранее выбранной задачи требуется подача команды из перечня команд другой задачи, по сигналу с этой кнопки 4ПП-правый приобретает функции задания наиболее используемых команд, после выбора которых кнопка переключения режимов управления отпускается и оба 4ПП приобретают функции, которые были до нажатия кнопки переключения режимов управления.
4. Система по п. 1, отличающаяся тем, что на рукоятке управления двигателем расположена кнопка переключения режимов управления и кнопка фиксации действий оператора, на рукоятке управления положением подвижного объекта установлена кнопка отмены действий оператора и в случае, когда в вычислитель поступает сигнал от нажатой кнопки переключения режимов управления, то вычислитель придает обоим 4ПП функции наборного поля, а кнопкам в обрамлении индикатора присваивает индицируемый на экране двухзначный цифровой код, при наборе которого с использованием двух 4ПП, аббревиатура кнопки обозначается рамкой, которая работает в проблесковом режиме и после нажатия кнопки фиксации действий оператора, кнопка в обрамлении индикатора активируется, а при ошибочном наборе цифрового кода он сбрасывается нажатием кнопки отмены действий оператора, при повторном нажатии кнопки переключения режимов управления оба 4ПП приобретают функции оперативного управления оборудованием подвижного объекта.
| Сушилка для фруктов, овощей и т.п. | 1928 |
|
SU24295A1 |
| Устройство для маскировки самолетов при помощи прожекторов | 1930 |
|
SU27562A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2240956C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПОРОШКООБРАЗНОГО ОРГАНОФИЛЬНОГО БЕНТОНИТА (БЕНТОНА) | 1998 |
|
RU2129577C1 |

