Область техники
Изобретение относится к определению местоположения объектов с помощью спутников, в частности к способу определения местоположения абонентского аппарата в спутниковой системе связи с использованием характеристик сигналов связи.
Уровень техники
Обычная спутниковая система связи содержит, по меньшей мере, одну наземную базовую станцию, представляющую собой узел межсетевого сопряжения и в дальнейшем именуемую как узловая базовая станция, по меньшей мере, один абонентский аппарат (например, мобильный радиотелефон) и, по меньшей мере, один спутник для ретрансляции сигналов связи между узловой станцией и абонентским аппаратом. Узловая станция обеспечивает каналы связи между абонентским аппаратом и другими абонентскими аппаратами или системами связи, например наземной системой телефонной связи.
Был разработан целый ряд систем связи с многостанционным доступом для передачи информации среди большого количества пользователей системы. Эти методы включают в себя методы с расширением спектра, основанные на множественном доступе с временным разделением каналов (МДВР), множественном доступе с частотным разделением каналов (МДЧР), множественном доступе с кодовым разделением каналов (МДКР), принципы которых хорошо известны в области связи. Использование методов МДКР в системе связи с множественным доступом раскрыто в патенте США №4901307 от 13.02.1990 г. на "Систему связи с расширенным спектром на основе множественного доступа с использованием спутниковых или наземных ретрансляторов", и в заявке на патент США №08/368570 от 4.01.1995 г. на "Способ и устройство для использования мощности передачи в полном спектре в системе связи с расширенным спектром для слежения за фазой, временем и энергией отдельного приемника", принадлежащих правопреемнику настоящего изобретения и упоминаемые здесь для сведения.
В вышеупомянутых патентных документах раскрыты системы связи с множественным доступом, в которых большое количество в основном мобильных или удаленных пользователей системы использует абонентские аппараты для связи с другими пользователями этой же системы или других подсоединенных систем, таких как коммутируемая телефонная сеть общего пользования. Абонентские аппараты осуществляют связь через узловые станции и спутники, используя сигналы связи типа сигналов МДКР с расширенным спектром.
Спутники связи формируют лучи, которые освещают "пятно", образованное в результате проецирования сигналов спутника на поверхность Земли. Типичная диаграмма излучения спутника в область пятна состоит из нескольких лучей, расположенных в заданной зоне обслуживания. Обычно каждый луч содержит несколько так называемых подлучей (также известных как каналы МДКР), обслуживающих общую географическую территорию, каждый из которых занимает разную полосу частот.
В типичной системе связи с расширением спектра используется набор заранее выбранных псевдошумовых (ПШ) кодовых последовательностей для модуляции (т.е. "расширения") информационных сигналов в заданной полосе спектра перед модуляцией на несущий сигнал для передачи как сигналов связи. Посредством ПШ расширения, способа передачи с расширением спектра, хорошо известного в области связи, формируется сигнал для передачи, имеющий гораздо большую ширину полосы, чем сигнал данных. В прямой линии связи (т.е. линии связи, начинающейся в узловой станции и заканчивающейся в абонентском аппарате) расширяющие ПШ коды и двоичные последовательности используются для различения сигналов, передаваемых узловой станцией в разных лучах, и для различения сигналов многолучевого распространения. Эти ПШ коды обычно совместно используются во всех сигналах связи в определенном подлуче.
В типичной системе МДКР с расширением спектра используются каналообразующие коды для различения между сигналами, предназначенными для конкретных абонентских аппаратов и передаваемыми в спутниковом луче на прямой линии связи. Это значит, что для каждого абонентского аппарата в прямой линии связи предусмотрен индивидуальный ортогональный канал за счет использования индивидуального каналообразующего ортогонального кода. Обычно для реализации каналообразующих кодов используются функции Уолша, типичная длина которых составляет 64 кодовых элемента для наземных систем и 128 кодовых элементов для спутниковых систем.
В типичных системах связи МДКР с расширением спектра, таких как описанная в патенте США №4901307, предусматривается использование когерентной модуляции и демодуляции для связи с абонентским аппаратом в прямой линии связи. В системах связи с использованием этого принципа в качестве когерентного фазового эталона для прямых линий связи используется высокочастотный пилот-сигнал. Это значит, что пилот-сигнал, который обычно не содержит информационной модуляции, передается с узловой станции во всю зону обслуживания. Обычно для каждого луча, используемого для каждой используемой частоты, передается один пилот-сигнал с каждой узловой станции. Эти пилот-сигналы совместно используются всеми абонентскими аппаратами, принимающими сигналы с данной узловой станции.
Пилот-сигналы используются абонентскими аппаратами для вхождения в синхронизм с системой и для слежения за временем, частотой и фазой других сигналов, передаваемых с узловой станции. Фазовая информация, полученная в результате отслеживания несущей пилот-сигнала, используется как эталон фазы несущей для когерентной демодуляции других сигналов системы и сигналов графика. Этот метод позволяет многим сигналам графика совместно использовать общий пилот-сигнал как эталон фазы, что обеспечивает более экономичный и эффективный механизм слежения.
Когда абонентский аппарат не участвует в сеансе связи (т.е. не принимает и не передает сигналы графика), узловая станция может посылать информацию на этот конкретный абонентский аппарат, используя сигнал, известный как сигнал радиовызова. Например, при поступлении вызова для конкретного мобильного телефона узловая станция предупреждает об этом данный мобильный телефон с помощью сигнала радиовызова. Сигналы радиовызова также используются для распространения назначений каналов трафика, назначений каналов доступа и системной служебной информации.
Абонентский аппарат может отреагировать на сигнал радиовызова посылкой сигнала доступа или сигнала попытки доступа по обратной линии связи (т.е. линии связи, начинающейся в абонентском аппарате и заканчивающейся в узловой станции). Сигнал доступа также используется, когда абонентский аппарат инициирует вызов.
Если необходимо установить связь с абонентским аппаратом, системе связи может понадобиться определить его местоположение. Необходимость в определении местоположения абонентского аппарата возникает по ряду причин. Одной из них является то, что системе необходимо выбрать соответствующую узловую станцию для обеспечения линии связи. Одним аспектом этой причины является выделение линии связи соответствующему поставщику услуг (например, телефонной компании). За поставщиком услуг обычно закреплена конкретная территория, на которой он обрабатывает все вызовы с находящимися на ней абонентами. Если требуется связь с конкретным абонентским аппаратом, система связи может распределить этот вызов поставщику услуг на основании территории, на которой находится данный абонентский аппарат. Чтобы определить соответствующую территорию, системе связи требуется знать местоположение абонентского аппарата. Подобная причина возникает, если необходимо распределять вызовы поставщикам услуг на основе политических границ или договорных услуг.
Важным требованием к определению местоположения в спутниковой системе связи является быстродействие. Когда возникает необходимость в установлении связи с определенным абонентским аппаратом, нужно быстро выбрать узловую станцию, которая будет обслуживать данный абонентский аппарат. Например, для пользователя мобильного радиотелефона вряд ли будет приемлемой задержка продолжительностью более нескольких секунд при размещении вызова. В этой ситуации точность определения местоположения менее важна, чем потребность в быстродействии. Погрешность меньше 10 км считается допустимой. Однако во многих известных решениях определения местоположения с помощью спутников отдается предпочтение точности, а не быстродействию.
Одно известное решение используется в системе ВМС США TRANSIT. В этой системе абонентский аппарат выполняет непрерывные измерения доплеровского сдвига сигнала, передаваемого в широковещательном режиме спутником на низкой околоземной орбите (НОЗО). Эти измерения продолжаются в течение нескольких минут. Для системы обычно требуется два прохождения спутника, что приводит к необходимости ожидания в течение более 100 минут. Кроме того, поскольку вычисления местоположения выполняются в абонентском аппарате, спутник должен передавать в широковещательном режиме информацию о своем местоположении (так называемые эфемериды). Хотя упомянутая система TRANSIT может обеспечивать высокую точность (порядка одного метра), сопутствующие ей задержки неприемлемы для использования в коммерческой спутниковой системе связи.
Другое известное решение используется в системах ARGOS и SARSAT (поисково-спасательный спутник). В этом решении абонентский аппарат передает прерывистый сигнал радиомаяка приемнику на спутнике, который выполняет частотные измерения сигнала. Если спутник принимает больше четырех сигналов радиомаяка от абонентского аппарата, он обычно может определить его местоположение. Из-за того, что сигнал радиомаяка имеет прерывистый характер, здесь отсутствуют продолжительные доплеровские измерения, как в системе TRANSIT.
Еще одно известное решение используется в глобальной спутниковой системе местоопределения (ГСМО). Каждый спутник передает широковещательный сигнал с меткой времени, который включает в себя эфемериды спутника. Когда абонентский аппарат принимает сигнал ГСМО, он измеряет задержку передачи относительно собственного времени и определяет псевдодальность до положения передающего спутника. В системе ГСМО требуется использовать три спутника для определения двумерных координат, и четыре - для определения трехмерных координат.
Одним из недостатков системы ГСМО является то, что для определения местоположения требуется, по меньшей мере, три спутника. Другой ее недостаток состоит в том, что, поскольку вычисления выполняются в абонентском аппарате, спутники системы ГСМО должны передавать в широковещательном режиме информацию своих эфемерид, а абонентский аппарат должен обладать вычислительными ресурсами для выполнения необходимых вычислений.
Недостатком всех перечисленных выше решений является то, что для их реализации абонентский аппарат должен иметь отдельный передатчик или приемник в дополнение к тому, который необходим для обработки сигналов связи.
Еще одно известное решение раскрыто в патенте США №5126748 от 30.06.1992 на "Двухспутниковую систему навигации и способ". В этом решении используются два спутника для активного определения положения абонентского аппарата с помощью трилатерации. Несмотря на определенные преимущества, в этом решении требуется два спутника.
Таким образом, существует потребность в спутниковой системе определения местоположения, позволяющей быстро определять местоположение с помощью всего одного спутника.
Сущность изобретения
Предложены система и способ для быстрого определения местоположения абонентского аппарата (например, мобильного радиотелефона) с использованием всего одного спутника в спутниковой системе связи, например системе связи со спутником на низкой околоземной орбите. Система содержит абонентский аппарат, по меньшей мере, один спутник с известным местоположением и известной скоростью и узловую станцию (т.е. наземную базовую станцию) для связи с абонентским аппаратом через спутник. Способ заключается в том, что определяют параметры, описывающие временные и пространственные соотношения между абонентским аппаратом и спутником, и определяют местоположение абонентского аппарата, используя эти параметры и известные местоположение и скорость спутника.
Двумя используемыми параметрами являются дальность и скорость изменения дальности. Параметр дальности представляет собой расстояние между спутником и абонентским аппаратом.
Параметр скорости изменения дальности представляет собой относительную радиальную скорость между абонентским аппаратом и спутником.
В предпочтительном варианте осуществления изобретения для определения местоположения абонентского аппарата на основании используемых параметров и известных положения и скорости спутника используется итерационный метод взвешенных наименьших квадратов Гаусса-Ньютона.
Одно из преимуществ изобретения заключается в том, что оно позволяет быстро определять местоположение, используя один спутник, например спутник на НОЗО.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием примеров его осуществления со ссылками на чертежи, на которых идентичные или функционально подобные элементы обозначены одинаковыми ссылочными позициями. Кроме того, левая цифра ссылочной позиции указывает чертеж, на котором впервые появляется этот номер.
Фиг.1 - типичная спутниковая система связи,
фиг.2 - структурная схема примерного варианта приемопередатчика, используемого в абонентском аппарате,
фиг.3 - структурная схема примерного варианта приемопередающего устройства, используемого в узловой станции,
фиг.4 - структурная схема примерного варианта системы слежения за временем, используемой в абонентском аппарате,
фиг.5 - структурная схема примерного варианта системы слежения за частотой, используемой в абонентском аппарате,
фиг.6 - иллюстрация подспутниковой точки и проекции на поверхность Земли изоконтуров параметров дальности и скорости изменения дальности, относящихся в данному спутнику,
фиг.7А - графическое представление составляющих частоты сигнала, измеряемого в абонентском аппарате,
фиг.7В - графическое представление составляющих частоты сигнала, измеряемого в узловой станции,
фиг.8 - алгоритм, иллюстрирующий работу предпочтительного варианта изобретения,
фиг.9 - структурная схема, иллюстрирующая примерный вариант рабочей среды, в которой можно использовать изобретение.
Подробное описание предпочтительных вариантов осуществления изобретения.
I. Введение
Предложены система и способ для быстрого определения местоположения абонентского аппарата в спутниковой системе связи с использованием всего одного спутника на низкой околоземной орбите (НОЗО). Специалистам будет понятно, что концепцию данного изобретения можно применить в спутниковых системах, в которых спутники вращаются не на НОЗО, если относительное перемещение спутников и абонентских аппаратов достаточно для обеспечения измерений скорости изменения дальности, описанных ниже.
В дальнейшем подробно обсуждается предпочтительный вариант изобретения. Несмотря на то, что описываются конкретные операции, конфигурации и компоновки, понятно, что это сделано только в целях иллюстрации. Для специалиста будут очевидны и другие операции, конфигурации и компоновки, не выходящие за рамки объема настоящего изобретения.
Описание изобретения состоит из четырех частей. В первой части описана типичная спутниковая система связи. Во второй части описываются параметры, используемые системой в способе определения местоположения. В третьей части способ определения местоположения описан в форме физического представления. И наконец, описано выполнение способа определения местоположения.
II. Типичная спутниковая система связи
На фиг.1 изображена типичная спутниковая система 100 связи. Спутниковая система 100 связи содержит узловую станцию 102, спутник 104 и абонентские аппараты 106. Абонентские аппараты 106 бывают, в основном, трех типов: стационарные абонентские аппараты 106А, обычно устанавливаемые в стационарных сооружениях, мобильные абонентские аппараты 106В, обычно устанавливаемые в транспортных средствах, и носимые абонентские аппараты 106С, обычно портативного типа. Узловая станция 102 осуществляет связь с абонентскими аппаратами 106 через спутник 104.
На фиг.2 изображен примерный вариант приемопередатчика 200, используемого в абонентском аппарате 106. Приемопередатчик 200 использует, по меньшей мере, одну антенну 210 для приема сигналов связи, которые подаются в аналоговый приемник 214, где они преобразуются с понижением частоты, усиливаются и дискретизируются. Обычно используется антенный переключатель 212, позволяющий одной и той же антенне выполнять как функции передачи, так и функции приема. Однако в некоторых системах используются отдельные антенны для работы на разных частотах.
Цифровые сигналы связи с выхода аналогового приемника 214 поступают в, по меньшей мере, один цифровой приемник 216А данных и, по меньшей мере, один цифровой поисковый приемник 218. Могут использоваться дополнительные цифровые приемники 216A-216N данных, выполненные в многоотводной конфигурации для получения заданных уровней разнесения сигналов, в зависимости от допустимого уровня сложности блока, как будет понятно специалистам. Приемник, выполненный таким образом, называется многоотводным приемником, а каждый цифровой приемник 216 данных называется отводом. Отводы многоотводного приемника используются не только для разнесения сигналов, но также для приема сигналов от множества спутников. Кроме того, можно использовать дополнительные поисковые приемники 218 для высокоскоростного обнаружения сигнала.
По меньшей мере, один управляющий процессор 220 абонентского аппарата электрически подключен к цифровым приемникам 216A-216N данных и к поисковому приемнику 218. Управляющий процессор 220 обеспечивает, помимо прочих функций, основную обработку сигналов, управление определением времени, мощностью и переключением каналов связи или координацией и выбором частоты, используемой для несущей сигнала. Другой основной функцией управления, которую часто выполняет управляющий процессор 220, является выбор или манипуляция кодовыми ПШ последовательностями или ортогональными функциями, которые должны использоваться для обработки форм сигналов связи. Обработка сигналов в управляющем процессоре 220 может включать в себя определение параметров, используемых в данном изобретении. Такие вычисления параметров сигнала, относящихся, например, к относительному времени и частоте, могут включать использование дополнительных или отдельных специальных электронных схем для повышения эффективности или скорости измерений, или улучшения распределения управляющих ресурсов обработки.
Выходы цифровых приемников 216A-216N данных электрически подсоединены к пользовательским цифровым электронным схемам 222 основной полосы (полосы частот модулирующих сигналов). Пользовательские цифровые электронные схемы 222 основной полосы включают в себя элементы обработки и представления, используемые для передачи информации в сторону пользователя абонентского аппарата и от него. Они включают в себя элементы хранения сигналов и данных, такие как кратковременные или долгосрочные запоминающие устройства; устройства ввода и вывода, такие как экраны дисплеев, динамики, клавиатуры и микротелефонные трубки; аналого-цифровые элементы, вокодеры и прочие элементы обработки речевых и аналоговых сигналов и т.п. Все вместе они образуют части абонентских электронных схем основной полосы, хорошо известных в области связи. Если используется обработка сигналов с разнесением, то пользовательские цифровые электронные схемы 222 основной полосы могут содержать объединитель разнесения и декодер. Некоторые из элементов могут также работать под управлением управляющего процессора 220 или посредством связи с ним.
Когда речевые или другие данные готовятся как выходное сообщение или сигнал связи, исходящий из абонентского аппарата, пользовательские цифровые электронные схемы 222 основной полосы используются для приема, хранения, обработки и иной подготовки к передаче требуемых данных. Пользовательские цифровые электронные схемы 222 основной полосы подают эти данные в модулятор 226 передачи, работающий под управлением управляющего процессора 220. Сигнал с выходя модулятора 226 передачи подается в регулятор 228 мощности, который обеспечивает регулировку выходной мощности в усилителе 230 мощности передачи для окончательной передачи выходного сигнала с антенны 210 в узловую станцию.
Приемопередатчик 200 может также использовать один или несколько элементов предкоррекции или предкорректоров 232 и 234. Работа таких предкорректоров описана в совместно рассматриваемой заявке на изобретение "Предкоррекция времени и частоты для негеостационарных спутниковых систем" за номером____(будет присвоен, дело патентного поверенного РА338), упоминаемой здесь для сведения. Предкоррекция предпочтительно происходит на выходе цифрового регулятора 228 мощности на частоте основной полосы. Спектральная информация основной полосы, включающая в себя корректировку частоты, переводится в соответствующую среднюю частоту несущей при повышающем преобразовании, выполняемом в усилителе 230 мощности передачи. Предкоррекцию или корректировку мощности выполняют с помощью известных методов. Например, предкоррекцию можно выполнять с помощью комплексного поворота сигнала, что эквивалентно умножению сигнала на коэффициент еjωt, где ω вычисляют на основании известных эфемерид спутника и требуемой частоты канала. Это очень полезно в тех случаях, когда сигналы связи обрабатываются как синфазные (I) и квадратурные (Q) каналы. Для формирования некоторых продуктов поворота можно использовать устройство прямого цифрового синтеза. Альтернативно, можно использовать цифровой вычислительный элемент для поворота координат, в котором используются двоичные сдвиги, сложения и вычитания для выполнения ряда дискретных поворотов, дающих в результате заданный общий поворот. Такие методы и аппаратные средства для их реализации хорошо известны в области связи.
В качестве альтернативы элемент 234 предкоррекции можно установить в тракте передачи на выходе усилителя 230 мощности передачи для коррекции частоты исходящего сигнала. Это можно реализовать с помощью известных методов, таких как повышающее или понижающее преобразование сигнала передачи. Но изменение частоты на выходе аналогового передатчика может быть более трудоемким, так как всегда имеется ряд фильтров, используемых для формирования сигнала, и изменения на этом соединении могут влиять на процесс фильтрации. Альтернативно, элемент 234 предкоррекции может быть частью механизма выбора или регулировки частоты в аналоговом каскаде 230 повышающего преобразования и модуляции в абонентском аппарате, чтобы использовать соответственно скорректированную частоту для преобразования цифрового сигнала на заданную частоту передачи за одну операцию.
Информация или данные, соответствующие одному или нескольким параметрам сигнала для принимаемых сигналов связи или одному или нескольким сигналам совместно используемого ресурса, могут посылаться в узловую станцию с использованием ряда известных методов. Например, эту информацию можно посылать как отдельный информационный сигнал или присоединять к другим сообщениям, подготовленным пользовательскими цифровыми электронными схемами 222 основной полосы. Альтернативно, информацию можно вводить в виде заданных битов управления модулятором 226 передачи или регулятором 228 мощности передачи под управлением управляющего процессора 220.
Цифровые приемники 216A-N данных и поисковый приемник 218 выполнены с элементами корреляции сигналов для демодуляции и отслеживания специальных сигналов. Поисковый приемник 218 используется для поиска пилот-сигналов или других сигналов высокой мощности с относительно устойчивой формой, а приемники 216A-N данных используются для отслеживания пилот-сигналов или демодуляции сигналов, связанных с обнаруженными пилот-сигналами. Следовательно, можно контролировать выходные сигналы этих блоков, чтобы обеспечить информацию, используемую для вычисления параметров согласно изобретению. Информацию об измерениях, выполненных абонентским аппаратом 106 на принимаемых сигналах связи или сигналах совместно используемого ресурса, можно посылать в узловую станцию с использованием ряда известных методов. Например, эту информацию можно передавать как отдельный сигнал данных или присоединять к другим сообщениям, подготовленным пользовательскими цифровыми электронными схемами 222 основной полосы. Приемники 216(A-N) данных также используют элементы слежения за частотой, которые можно контролировать для получения текущей информации о частоте и времени для управления процессором 220 в отношении демодулируемых сигналов. Этот аспект обсуждается в дальнейшем со ссылками на фиг.4 и 5.
Управляющий процессор 220 использует эту информацию для определения, в какой мере принимаемые сигналы сдвинуты относительно ожидаемой частоты, на основании частоты гетеродина при масштабировании ее в ту же полосу частот. При необходимости эта и другая информация, относящаяся к сдвигам частоты, погрешностям и доплеровским сдвигам, может сохраняться в одном или нескольких элементах 236 памяти ошибок/доплеровского сдвига. Эту информацию можно использовать в управляющем процессоре 220 для корректировки его рабочей частоты или можно передавать в узловую станцию, используя разные сигналы связи.
Для формирования и хранения хронологической информации, такой как дата и время суток, позволяющей определить положения спутника, используется, по меньшей мере, один элемент 238 эталона времени. Это время можно запоминать и периодически корректировать. Его можно также периодически передавать с узловой станции. Кроме того, текущее время запоминается каждый раз, когда абонентский аппарат входит в нерабочий режим, т.е. "выключается". Это значение времени вместе с временем "включения" используется для определения разных зависящих от времени параметров сигнала и изменений в местоположении абонентского аппарата.
Кроме того, для хранения специальной информации о параметрах, обсуждаемых более подробно ниже, можно использовать элементы 240 и 242 памяти. Например, элемент 240 памяти может хранить измерения, выполненные абонентским аппаратом и относящиеся к параметру скорости изменения дальности, например изменения в относительных сдвигах частоты между двумя приходящими сигналами. Элемент 242 памяти можно использовать для хранения измерений, выполненных абонентским аппаратом и относящихся к параметру разности дальности, например разность времени прихода двух сигналов. В этих элементах памяти используются конструкция и схемы, хорошо известные в области связи, и они могут быть выполнены в виде отдельных элементов или как более крупная унифицированная конструкция, в которой эта информация сохраняется с возможностью управления для последующего ее извлечения.
Как показано на фиг.2, гетеродин 250 или генератор опорной частоты используется в качестве эталона в аналоговом приемнике 214 для понижающего преобразования входящего сигнала в основную полосу на заданной частоте. При желании его также можно использовать во множестве промежуточных операций преобразования до тех пор, пока сигнал не достигнет заданной частоты основной полосы. Как показано на чертеже, гетеродин 250 также используется в качестве эталона в аналоговом передатчике 230 для повышающего преобразования из основной полосы на заданную частоту несущей для передачи в обратной линии связи, и в качестве стандарта или эталона частоты для схемы 252 тактирования. Схема 252 тактирования формирует тактовые сигналы для других каскадов или элементов обработки в абонентском аппарате 200, например, для схем слежения, корреляторов в цифровых приемниках 216A-N и 218, модулятора 226 передачи, элемента 238 эталона времени и управляющего процессора 220. Схему 252 тактирования можно также выполнить с возможностью создания задержек в целях запаздывания или опережения относительно тактирования тактовых сигналов под управлением процессора. Таким образом, слежение за временем можно корректировать на заданные величины. Это также позволяет применять коды, которые должны опережать "нормальное" тактирование или отставать от него, обычно на один или несколько периодов элемента сигнала, чтобы при желании можно было применить ПШ коды или элементы сигнала, образующие эти коды, с другим тактированием.
На фиг.3 показан примерный вариант приемопередающего устройства 300, используемого в узловой станции 102. Часть узловой станции 102, показанная на фиг.3, имеет один или несколько аналоговых приемников 314, подсоединенных к антенне 310, для приема сигналов связи, которые затем преобразуются с понижением частоты, усиливаются и дискретизируются с помощью разных известных цифровых схем. В некоторых системах связи используется несколько антенн 310. Дискретные сигналы с выхода аналогового приемника 314 подаются на вход, по меньшей мере, цифрового приемного модуля 324, показанного штриховыми линиями.
Каждый цифровой приемный модуль 324 соответствует элементам обработки сигнала, используемым для управления связью между узловой станцией 102 и одним абонентским аппаратом 106, хотя известны и другие варианты. Один аналоговый приемник 314 может подавать входные сигналы в несколько цифровых приемных модулей 324, и обычно в узловых станциях 102 используется несколько таких модулей для обеспечения обработки всех лучей спутников и возможных разнесенных сигналов в любой момент времени. Каждый цифровой приемный модуль 324 имеет один или несколько цифровых приемников 316 данных и поисковые приемники 318. Поисковый приемник 318 в основном осуществляет поиск соответствующих режимов разнесения сигналов, отличных от пилот-сигналов, и для повышения скорости поиска может параллельно использоваться несколько поисковых блоков. При реализации в системе связи для приема сигналов с разнесением используется множество цифровых приемников 316A-N.
Выходные сигналы цифровых приемников 316 данных подаются в следующие элементы 322 обработки в основной полосе, которые известны в области связи и не показаны в деталях. Возможный вариант устройства обработки в основной полосе содержит объединители разнесения и декодеры для объединения сигналов многолучевого распространения в один выходной сигнал для абонента. Устройство обработки в основной полосе также содержит интерфейсные схемы для обеспечения выходных данных обычно для цифрового коммутатора или сети. Часть элементов 322 обработки в основной полосе может быть реализована в виде целого ряда других известных элементов, таких как вокодеры, модемы данных и цифровые компоненты коммутации и хранения данных, не ограничиваясь перечисленным. Эти элементы служат для управления или направления передачи сигналов данных в один или несколько передающих модулей 334.
Каждый сигнал, подлежащий передаче в абонентские аппараты 106, электрически подается в один или несколько передающих модулей 334. Типичная узловая станция использует несколько таких передающих модулей 334, чтобы одновременно обслуживать множество абонентских аппаратов 106, а также несколько спутников и лучей. Количество передающих модулей 334, используемых в узловой станции 102, определяется известными факторами, включая сложность системы, число спутников, обычно находящихся в поле зрения, абонентскую пропускную способность, выбранную степень разнесения и т.п.
Каждый передающий модуль 334 содержит модулятор 326 передачи, который модулирует с расширением спектра данные для передачи и имеет выход, электрически связанный с цифровым регулятором 328 мощности передачи, который регулирует мощность передачи, используемую для исходящего цифрового сигнала. Цифровой регулятор 328 мощности передачи использует минимальный уровень мощности для снижения уровня помех и распределения ресурсов и соответствующие уровни мощности, когда это требуется для компенсации ослабления на тракте передачи и других характеристик передачи на тракте. ПШ генератор 332 используется модулятором 326 передачи для расширения сигналов. Эта генерация кода может составлять функциональную часть одного или нескольких управляющих процессоров или элементов памяти, используемых в узловой станции 102.
Выходной сигнал регулятора 328 мощности передачи подается в сумматор 336, где он суммируется с выходными сигналами других схем управления мощности. Эти выходные сигналы должны передаваться другим абонентским аппаратам 106 на той же частоте и с тем же лучом, что выходной сигнал регулятора 328 мощности передачи. Выходной сигнал сумматора 336 подается в аналоговый передатчик 338 для цифроаналогового преобразования, преобразования на соответствующую несущую частоту, последующего усиления, фильтрации и подачи в одну или несколько антенн 340 для излучения в сторону абонентских аппаратов 106. Антенны 310 и 340 могут быть одними и теми же антеннами, в зависимости от сложности и конфигурации данной системы связи.
По меньшей мере, один управляющий процессор 320 узловой станции электрически подсоединен к приемным модулям 324, передающим модулям 334 и электронным схемам обработки 322 в основой полосе. Эти блоки могут быть физически разделены. Управляющий процессор 320 обеспечивает команды и сигналы управления для осуществления, не ограничиваясь перечисленным, таких функций, как обработка сигналов, формирование тактового сигнала, управление мощностью, управление переключениями каналов связи, объединение сигналов разнесения и сопряжение систем. Кроме того, управляющий процессор 320 назначает расширяющие ПШ коды, ортогональные кодовые последовательности и конкретные передатчики и приемники или модули для использования в абонентских сеансах связи. Управляющий процессор 320 можно также использовать для вычисления параметров и осуществления предложенного способа определения местоположения.
Управляющий процессор 320 также управляет формированием и мощностью канальных пилот-сигналов, синхросигналов и сигналов радиовызова, а также их связью с регулятором 328 мощности передачи. Канал пилот-сигнала представляет собой просто сигнал, который не модулирован данными и может использовать многократную, постоянную комбинацию или неизменную структуру кадра. Это значит, что ортогональная функция, используемая для формирования канала пилот-сигнала, имеет по существу постоянное значение, например, все 1, или все 0, или известную комбинацию перемежающихся 1 и 0.
Хотя управляющий процессор 320 может быть напрямую электрически связан с элементами какого-то модуля, например, передающего модуля 334 или приемного модуля 324, каждый модуль, как правило, содержит специальный процессор, такой как передающий процессор 330 или приемный процессор 321, управляющий элементами этого модуля. В предпочтительном варианте осуществления изобретения управляющий процессор 320 электрически связан с передающим процессором 330 и приемным процессором 321, как показано на фиг.3. Таким образом, один управляющий процессор 320 может более эффективно управлять операциями большого количества модулей и ресурсов. Передающий процессор 330 управляет формированием и мощностью пилот-сигналов, синхросигналов, сигналов радиовызова и сигналов канала трафика и их соответствующей подачей в регулятор 328 мощности. Приемный процессор 321 управляет поиском, расширяющими ПШ кодами для демодуляции и контролем принимаемой мощности. Процессор 321 можно также использовать для определения параметров сигналов, используемых в предложенном способе, или он может обнаруживать и передавать информацию, принятую с абонентского аппарата относительно таких параметров, снижая тем самым нагрузку на управляющий процессор 320.
Для реализации вариантов осуществления изобретения можно использовать один или более предкорректоров или элементов 342 и 344 предкоррекции частоты. Предпочтительно, чтобы использовался предкорректор 342 для коррекции частоты цифрового выходного сигнала цифрового регулятора 328 мощности на частоте основной полосы. Как и в абонентском аппарате, спектральная информация основной полосы, включающая коррекцию частоты, преобразуется в соответствующую среднюю частоту несущей во время повышающего преобразования, выполняемого в аналоговом передатчике 338. Предкоррекция частоты осуществляется с помощью известных методов, например, описанного выше комплексного поворота сигнала, в котором угол поворота вычисляется на основании известных эфемерид спутника и заданной частоты канала. Как и в абонентском аппарате, можно использовать и другие методы поворота сигнала и соответствующие аппаратные средства, не выходя за рамки объема изобретения.
При желании можно также в дополнение к предкоррекции частоты осуществлять предкоррекцию времени для изменения относительного тактирования сигналов или ПШ кодов. Это обычно реализуется путем коррекции генерации и тактирования кода или тактирования другого параметра сигнала, когда сигнал формируется в основной полосе и до его выдачи регулятором 328 мощности. Например, контроллер 320 может определить, когда генерируются коды, и их относительное тактирование и применение к сигналам, а также когда сигналы подвергаются обработке модулятором 326 передачи и передаются в разные спутники регулятором 328 мощности. Однако при желании можно использовать известные элементы или схемы предкоррекции времени, являющиеся частью блоков или отдельными блоками (не показаны), аналогичными элементам 342 и 344.
На фиг.3 предкорректор 342 показан как расположенный в тракте передачи перед сумматором 336. Это позволяет при желании осуществлять отдельный контроль за каждым абонентским аппаратом. Однако можно использовать один элемент предкоррекции, когда предкоррекция выполняется после сумматора 336, потому что абонентские аппараты совместно используют один и тот же тракт передачи от узловой станции к спутнику.
В качестве альтернативы предкорректор 344 может быть расположен в тракте передачи на выходе аналогового передатчика 338 для коррекции частоты исходящего сигнала с использованием хорошо известных методов. Однако изменение частоты на выходе аналогового передатчика может быть более трудоемким и влиять на процессы фильтрации сигнала. Альтернативно, выходная частота аналогового передатчика 338 может корректироваться непосредственно управляющим процессором 320 для обеспечения выходной частоты, сдвинутой относительно нормальной средней частоты несущей.
Величина коррекции частоты, вводимой в исходящий сигнал, основана на известном доплеровском сдвиге между узловой станцией и каждым спутником, через который осуществляется связь. Величина сдвига, необходимого для учета доплеровского сдвига спутника, может вычисляться управляющим процессом 320 с использованием известных данных орбитального положения спутника. Эти данные могут храниться в одном или нескольких элементах 346 памяти, таких как справочные таблицы или элементы памяти, и извлекаться из них. При желании эти данные можно также получать из других источников данных. Элементы памяти могут быть реализованы с помощью целого ряда известных устройств, таких как схемы ПЗУ и ЗУПВ или магнитные запоминающие устройства. Эта информация используется для определения коррекции доплеровского сдвига для каждого спутника, используемого узловой станцией в данный момент времени.
Как показано на фиг.3, блок времени и частоты (БВЧ) 348 подает сигналы опорной частоты в аналоговый приемник 314. В некоторых применениях можно использовать сигнал единого времени (ЕВ) от приемника ГСМО как часть этого процесса. При желании его можно также использовать во многих промежуточных операциях преобразования. БВЧ 348 также служит эталоном для аналогового передатчика 338. Он также обеспечивает тактовые сигналы для других каскадов или элементов обработки в приемопередающем устройстве 300 узловой станции, например, корреляторов в цифровых приемниках 316A-N и 318, модуляторе 326 передачи и управляющем процессоре 320. При желании БВЧ 348 может быть также выполнен с возможностью обеспечения запаздывания или опережения относительного тактирования синхросигналов при управлении от процессора на заданные величины.
На фиг.4 показан возможный вариант выполнения измерений тактирования, представляющий систему 400 слежения за временем для абонентского аппарата. Этот тип системы слежения за временем известен как система Тау Дитера. На фиг.4 сигналы связи, поступающие с аналогового приемника, обычно подвергаются дискретизации с избыточной частотой, а затем вводятся в прореживатель 402. Прореживатель 402 работает с заданной скоростью и тактированием, чтобы передавать в последующие каскады приемника только определенные выборки.
Прореженные выборки подаются в объединяющий элемент 404, обычно умножитель, для объединения с соответствующими системными расширяющими ПШ кодами, поступающими из ПШ генератора или источника 406, для свертки сигнала. Свернутый сигнал поступает в объединяющий элемент 408, где он объединяется с соответствующими ортогональными кодовыми функциями Wi, вырабатываемыми кодовым генератором или источником 410, если таковой используется, для получения данных. Ортогональными кодовыми функциями являются функции, используемые для создания каналов сигналов связи. Обычно для этого процесса используются пилот-сигналы и сигналы радиовызова, хотя можно использовать и другие сигналы высокой мощности. Следовательно, ортогональный код по существу является кодом, используемым для выработки пилот-сигнала или сигнала радиовызова, известных в области связи. Альтернативно, можно объединить расширяющие ПШ коды с ортогональными кодами, а затем объединить их с выборками за одну операцию известным способом.
В качестве схемы слежения за временем можно использовать схему "опережения/запаздывания", описанную в патенте США №4901307, упоминавшемся выше. В этом решении степень, в которой тактирование входящих сигналов и цифровых приемников является одинаковым или согласованным, измеряется путем выборки входящего потока данных при сдвиге относительно номинального времени элементов сигнала. Этот сдвиг может быть равен плюс или минус половине периода элемента ПШ кода и называется соответственно "запаздывание" или "опережение".
Если тактирование данных с плюс или минус сдвигом симметрично отличается от тактирования номинальных пиков свернутых входящих сигналов, то разность между значениями выборки запаздывания и опережения равны нулю. Это значит, что значение, полученное за счет формирования разности между запаздывающими и опережающими сигналами, стремится к нулю, когда сдвиг на половину элемента центрирован в области своевременного тактирования принятого сигнала. Если относительное тактирование, используемое приемниками 216, не обеспечивает точного слежения за временем принятого сигнала и опережает данные входящего сигнала, тогда разность сигнала запаздывания и сигнала опережения дает сигнал коррекции с положительным значением. Если же тактирование сигнала слишком медленное, эта разность дает сигнал коррекции с отрицательным значением. Понятно, что при желании можно также использовать обратную или иную зависимость.
Для реализации этого метода выходным сигналом прореживателя управляют таким образом, чтобы он появился на пол-элемента раньше, чем при нормальной демодуляции сигналов. Затем выходной сигнал прореживателя свертывают и декодируют, а полученные данные накапливают в течение заранее выбранного периода (обычно периода символа) в накапливающем регистре 414. Накопленные данные символа формируют энергии символов, которые возводятся в квадрат в элементе 416 возведения в квадрат для получения неотрицательных значений величины для опережающего сигнала.
С помощью накапливающего регистра 414 накапливается и суммируется или интегрируется другая группа выборок за последующий заранее выбранный период. Но в этом периоде для задержки подачи ПШ и ортогональных кодов на один период элемента сигнала используется набор элементов 412 задержки. Это дает тот же эффект, что и изменение тактирования выборок, или прореживание, обеспечивая запаздывающую версию свернутых и декодированных данных. Свернутые и декодированные данные накапливаются в течение заданного периода в накапливающем регистре 414. При желании можно использовать дополнительные элементы и устройства памяти. Накопленные запаздывающие данные символа возводятся в квадрат в элементе 416 возведения в квадрат. Полученные опережающие и запаздывающие возведенные в квадрат значения либо вычитаются друг из друга, либо сравниваются для получения требуемой разности тактирования с запаздыванием/опережением в элементе 418. Эту разность фильтруют в фильтре 420 тактирования для получения сигнала 422 опережения/запаздывания. Система слежения за временем продолжает чередовать использование незадержанных и задержанных кодов для получения опережающих и запаздывающих символов, которые используются для обновления или формирования значений сигнала 422 опережения/запаздывания. Эта процедура продолжается до тех пор, пока тактирование приемника не будет установлено в исходное состояние, например, когда приемник выключается или переводится на отслеживание нового сигнала, как будет понятно специалистам.
Контроль за исходным и текущим тактированием для процесса прореживания и задержка кодов обеспечиваются специальными электронными схемами, например схемой 424 управления тактированием. Это значит, что схема 424 управления тактированием определяет время взятия выборки из прореживателя 402. В то же время формирование расширяющих ПШ кодов и ортогонального кода также происходит под управлением сигналов из схемы 424 управления тактированием. Такое тактирование иногда называют сигналом разрешения подачи ПШ кода, так как оно разрешает применение кодов. Можно также использовать сигнал инициализации или сигнал тактирования EPOCH. Тактирование, выбранное схемой 424 управления тактированием, корректируется сигналом 422 опережения/запаздывания в ответ на выходной сигнал схемы тактирования. Обычно это время имеет опережение на отрезок времени, составляющих какую-то долю периода элемента сигнала, например, 1/8 элемента сигнала, если используется восьмикратная избыточная дискретизация, для накопления входного сигнала перед прореживанием. Использование таких механизмов тактирования и опережения и запаздывания хорошо известно в области связи.
Для определения относительных задержек времени прихода сигнала используется величина, на которую каждый отвод или цифровой приемник корректирует свое тактирование для синхронизации или согласования с входным сигналом. Это легко реализуется путем слежения за общей величиной изменения времени (опережения/запаздывания), используемой в системе 400 тактирования. Накопительный регистр 426 можно использовать просто для накопления и суммирования каждого сигнала или команды опережения/запаздывания за выбранный период времени. Таким образом, можно получить общую величину изменения, необходимого для согласования входящего сигнала с тактированием приемника. Она представляет собой сдвиг сигнала относительно локального тактирования абонентского аппарата или приемника. Если тактирование абонентского аппарата относительно близко к тактированию узловой станции или синхронизировано с ним, это может дать меру задержки, испытываемой сигналом, когда он проходит между узловой станцией и абонентским аппаратом, что позволяет вычислить дальность. К сожалению, таким прямым вычислениям препятствуют многие факторы, такие как неточность или дрейф гетеродина.
Как уже отмечалось выше, эти данные можно посылать в узловую станцию как часть других сообщений или как специальные сигналы информации времени. Данные можно хранить в элементах краткосрочной памяти для последующей передачи и использования. Эту информацию можно также передавать или сохранять с какой-либо формой "метки времени", отражающей время сбора данных, так что узловая станция имеет точную временную зависимость для данных и может более точно определить местоположение абонентского аппарата. Но как уже отмечалось выше, требования к точности систем связи не являются очень жесткими. Если информация передается достаточно быстро после ее сбора, то простановка меток времени не приносит большой пользы. Обычно данные посылаются в течение нескольких кадров данных после их измерений и, если возникают проблемы с передачей, данные формируются снова перед их передачей, в результате они запаздывают всего на несколько кадров. Однако метки времени повышают гибкость при передаче данных и повторной передаче сигналов или групп сигналов, независимо от действительного времени. В противном случае, если для поддержания заданного уровня точности в системе не используются временные метки, то, вероятно, используются фиксированные временные интервалы и требования к представлению сообщений.
Подобный процесс используется и для сигналов, принимаемых узловой станцией, за исключением того, что пилот-сигнал не детектируется, а ортогональные коды в основном связаны с сигналами попытки доступа. Одним преимуществом для узловой станции является то, что время можно рассматривать как эталон абсолютного времени. То есть узловая станция имеет точное системное время, как было описано выше, и может точно определять разность времени для применения ПШ или ортогональных кодов относительно ее собственного времени. Это позволяет узловой станции определять точное время прохождения сигнала или расстояние из состояния ПШ кодов, используемых в каждом приемнике или отводе. Время прохождения сигнала или расстояние можно использовать для определения параметра дальности согласно изобретению. Следовательно, информацию для каждого отвода можно обрабатывать отдельно, так как это полезно в некоторых применениях, и нет необходимости объединять ее с помощью элемента 428, как было описано ранее.
На фиг.5 показан один вариант реализации измерений частоты, который представляет собой общий вид схемы 500 слежения за частотой для абонентского аппарата. Эти измерения частоты можно использовать для определения параметра скорости изменения дальности согласно изобретению. На фиг.5 сигналы связи из аналогового приемника вводятся в поворотное устройство 502. Поворотное устройство 502 работает на заданной, но регулируемой фазе для удаления остаточных погрешностей частоты или сдвигов из цифровых выборок, поступающих из аналогового приемника в цифровой приемник или отвод.
При использовании сигналов типа МДКР выборки можно передавать в один или несколько объединителей 504, обычно умножитель, для объединения с соответствующими системными расширяющими ПШ кодами, формируемыми одним или несколькими кодовыми генераторами или источниками 506, для получения данных. Такие расширяющие ПШ коды или ортогональные коды можно объединить с сигналом отдельно или вместе за одну операцию. Если для коррекции частоты используются каналы трафика, то можно использовать элемент быстрого преобразования Адамара (БПА) вместо объединителя 504 и кодового генератора 506. Этот метод описан в заявке на патент США 08/625481 на "Слежение за частотой для ортогональной модуляции Уолша", принадлежащей правопреемнику данного изобретения и упоминаемой здесь для сведения.
Сигналы, полученные после поворота, свертывания и декодирования, накапливаются в течение периода символа в накапливающем регистре 514 для получения символа данных, а результаты подаются в элемент или генератор 518 векторного произведения. В то же время каждый символ подается в элемент 516 временной задержки на один символ, который создает задержку на период одного символа перед передачей символа в генератор 518 векторного произведения.
Генератор 518 векторного произведения формирует векторное произведение между заданным символом и предыдущим символом, чтобы определить изменение фазы между этими символами. Это дает меру погрешности в повороте фазы, внесенном в входной сигнал. Выходной сигнал генератора 518 векторного произведения подается как оценка погрешности частоты или коэффициент коррекции в поворотное устройство 502 и кодовый генератор 506.
Управление тактированием для процессов свертки и декодирования обеспечивается электронными схемами, такими как схема 524 управления тактированием, описанная выше. Это тактирование может быть обеспечено как выходной сигнал системы тактирования, описанной выше.
Для определения относительных сдвигов частоты в приходящих сигналах используется величина, на которую каждый отвод или цифровой приемник корректирует свою фазу для согласования с входным сигналом. Это значит, что величина, на которую должна быть скорректирована фаза поворотного устройства для удаления остаточной погрешности в согласовании сигнала, означает величину, на которую сдвинута частота приходящего сигнала относительно ожидаемой или локальной опорной частоты данного абонентского аппарата.
Так как система связи работает в фиксированных наборах диапазонов частот для сигналов связи, в приемниках известно, какие средние или номинальные несущие частоты следует использовать. Но в результате доплеровских сдвигов и других эффектов, которые могут быть минимальными, приходящий сигнал не будет на ожидаемой средней частоте несущей. Описанные выше корректировки определяют сдвиг, который следует использовать для определения доплеровских сдвигов и действительной частоты приходящего сигнала.
Это легко осуществить путем отслеживания общей величины изменения, применяемого системой 500 слежения за частотой. Накопительный регистр 522 можно использовать для простого накопления фазовых изменений из оценок погрешностей, сигналов или команд за заданный период. Это дает полную величину изменения, необходимого для согласования частот входящего сигнала и приемника, и представляет сдвиг частоты сигнала относительно локальной частоты абонентского аппарата или приемника, масштабированной в соответствующую полосу частот.
Как и прежде, эти данные посылаются в узловую станцию как часть других сообщений или как специальные сигналы информации о частоте. Эти данные можно сохранить в краткосрочной памяти для последующей передачи и можно также снабдить их каким-либо видом "метки времени". Но это не является необходимым, так как данные посылаются в течение нескольких кадров данных после измерений и могут быть сформированы снова в случае возникновения проблем. Если же метки времени не используются для поддержания заданного уровня точности, в системе, вероятно, используются фиксированные временные интервалы и требование предоставления сообщений.
III. Рабочие параметры
В предпочтительном варианте изобретения используются два параметра: дальность и скорость изменения дальности. Эти параметры описывают пространственные и временные соотношения между абонентским аппаратом 106 и спутником 104. В дальнейшем подробно описываются эти параметры, их измерение и использование.
На фиг.6 показана проекция изоконтуров, представляющих эти параметры, на поверхность Земли. Изоконтур параметра представляет собой кривую, соединяющую все точки, имеющие одинаковое значение данного параметра. На фиг.6 показана подспутниковая точка 614 (т.е. точка на земной поверхности, находящаяся непосредственно под спутником) и проекция на поверхность Земли иэоконтуров параметров дальности и скорости изменения дальности, относящихся к спутнику 104. Для иллюстрации примерного масштаба используются две оси, ось Х 602А и ось Y 602В, градуированные в тысячах километров.
Дальность
Параметр дальности представляет собой расстояние между спутником и абонентским аппаратом. В предпочтительном варианте изобретения параметр дальности является расстоянием R между спутником 104 и абонентским аппаратом 106. Проекция изоконтура R на поверхность Земли описывается окружностью с центром под соответствующим спутником, как показано точкой 604 на фиг.4. В предпочтительном варианте изобретения R получают путем измерения задержки при двойном прохождении (ЗДП) сигнала, передаваемого со спутника 104 на абонентский аппарат 106 и обратно в тот же спутник 104. Затем определяют R путем деления ЗДП на два, чтобы получить задержку в одну сторону, и умножают результат на скорость света, которая представляет собой скорость сигнала. В альтернативном варианте ЗДП используется как параметр дальности.
В предпочтительном варианте изобретения ЗДП измеряют следующим способом. Сначала узловая станция 102 передает сигнал, содержащий известную текущую ПШ последовательность или расширяющий код. Этот сигнал ретранслируется на абонентский аппарат 106 спутником 104. Абонентский аппарат 106 снова передает этот сигнал сразу же или после известной задержки. Повторно переданный сигнал ретранслируется обратно в узловую станцию 102 тем же спутником 104. Затем узловая станция 102 сравнивает состояние ПШ последовательности в принятом сигнале с состоянием локальной ПШ последовательности. Разность состояний затем используется для определения общей задержки при двойном прохождении, которая включает в себя известные задержки между узловой станцией 102 и спутником 104. Эти задержки известны, так как расстояние между спутником 104 и узловой станцией 102 сохраняется узловой станцией 102 известным способом. Вычитание этих известных задержек из общих задержек при двойном прохождении дает ЗДП. Используя известные эфемериды спутника, вычисляются известные задержки между узловой станцией 102 и спутником 104 известным способом.
Специалистам будет понятно, что для получения R можно использовать и другие способы, не выходя за рамки объема изобретения.
В предпочтительном варианте изобретения задержку при двойном прохождении можно измерять во время вызова или во время установления соединения. Если измерение выполняется во время установления соединения, то измеряемый сигнал обычно передают с узловой станции 102 в абонентский аппарат 106 как часть сигнала радиовызова, и повторно передают с абонентского аппарата 106 в узловую станцию 102 как часть сигнала доступа. Если же измерение выполнятся во время вызова, то измеренный сигнал обычно передают с узловой станции 102 в абонентский аппарат 106 и обратно как часть сигналов трафика. Специалистам будет понятно, что измеренный сигнал может быть другого типа или при желании может быть введен в другие сигналы, что не выходит за рамки объема изобретения.
Скорость изменения дальности
Параметр скорости изменения дальности представляет собой относительную радиальную скорость между абонентским аппаратом 106 и спутником 104. В предпочтительном варианте изобретения параметр скорости изменения дальности является относительной радиальной скоростью  между абонентским аппаратом 106 и спутником 104. В альтернативном варианте изобретения параметром скорости изменения дальности является допплеровский сдвиг ЗДПдоп в сигналах, передаваемых между абонентским аппаратом 106 и спутником 104.
между абонентским аппаратом 106 и спутником 104. В альтернативном варианте изобретения параметром скорости изменения дальности является допплеровский сдвиг ЗДПдоп в сигналах, передаваемых между абонентским аппаратом 106 и спутником 104.  можно вычислить, умножив ЗДПдоп на скорость света и разделив на среднюю частоту несущей. Проекция изоконтуров ЗДПдоп на поверхность Земли описывается набором гиперболообразных кривых, симметричных по отношению к вектору 616 скорости соответствующего спутника, как показано точкой 606 на фиг.6. Контур ЗДПдоп=0, который проходит через подспутниковую точку 614 спутника 104, описывает прямую линию.
можно вычислить, умножив ЗДПдоп на скорость света и разделив на среднюю частоту несущей. Проекция изоконтуров ЗДПдоп на поверхность Земли описывается набором гиперболообразных кривых, симметричных по отношению к вектору 616 скорости соответствующего спутника, как показано точкой 606 на фиг.6. Контур ЗДПдоп=0, который проходит через подспутниковую точку 614 спутника 104, описывает прямую линию.
В предпочтительном варианте изобретения  определяют с помощью выполнения двух измерений (одно в абонентском аппарате 106 и одно в узловой станции 102) следующим способом. Абонентский аппарат 106 измеряет частоту сигнала, принятого с узловой станции 102 через спутник 104, и сообщает эту частоту в узловую станцию 102. Узловая станция 102 измеряет частоту сигнала, принятого с абонентского аппарата 106 через тот же спутник 104. Теперь в узловой станции 102 имеются два измерения. В предпочтительном варианте эти частоты измеряют относительно частот гетеродина. После этого можно получить фактическую частоту, как будет описано ниже. Этот метод описан в совместно рассматриваемой заявке того же заявителя на изобретение "Определение сдвигов частоты в системах связи" (дело патентного поверенного РА300), которая упоминается здесь для сведения.
определяют с помощью выполнения двух измерений (одно в абонентском аппарате 106 и одно в узловой станции 102) следующим способом. Абонентский аппарат 106 измеряет частоту сигнала, принятого с узловой станции 102 через спутник 104, и сообщает эту частоту в узловую станцию 102. Узловая станция 102 измеряет частоту сигнала, принятого с абонентского аппарата 106 через тот же спутник 104. Теперь в узловой станции 102 имеются два измерения. В предпочтительном варианте эти частоты измеряют относительно частот гетеродина. После этого можно получить фактическую частоту, как будет описано ниже. Этот метод описан в совместно рассматриваемой заявке того же заявителя на изобретение "Определение сдвигов частоты в системах связи" (дело патентного поверенного РА300), которая упоминается здесь для сведения.
Эти измерения могут быть представлены двумя уравнениями с двумя неизвестными: относительной радиальной скоростью  и нормированным сдвигом f0ff/f0 гетеродина абонентского аппарата 106. Эту пару уравнений можно решить для двух неизвестных, получив не только
и нормированным сдвигом f0ff/f0 гетеродина абонентского аппарата 106. Эту пару уравнений можно решить для двух неизвестных, получив не только  , но также f0ff/f0, которое является измерением, полезным в других аспектах работы системы спутниковой связи, как будет очевидно для специалистов.
, но также f0ff/f0, которое является измерением, полезным в других аспектах работы системы спутниковой связи, как будет очевидно для специалистов.
Решение этих двух уравнений проиллюстрировано графически на фиг.7А и 7В. Фиг.7А дает графическое представление составляющих частоты, измеренных в абонентском аппарате 106. Фиг.7В дает графическое представление составляющих частоты, измеренных в узловой станции 102.
 - относительная радиальная скорость между спутником 104 и абонентским аппаратом 106,
- относительная радиальная скорость между спутником 104 и абонентским аппаратом 106,
С - скорость прохождения (скорость света),
fF - номинальная частота прямой линии связи,
fR - номинальная частота обратной линии связи,
f0ff - номинальная частота гетеродина абонентского аппарата 106,
f0ff/f0 - нормированный сдвиг частоты гетеродина абонентского аппарата 106.
Как показано на фиг.7А, частота, измеряемая в абонентском аппарате 106, определяется как
Как показано на фиг.7В, частота, измеряемая в узловой станции 102, определяется как
Сложение и вычитание (1) и (2) дает сдвиг частоты и относительную радиальную скорость согласно зависимостям



Специалистам будет понятно, что можно использовать и другие способы определения  , не выходя за рамки объема изобретения.
, не выходя за рамки объема изобретения.
В предпочтительном варианте изобретения замеры частоты могут производиться во время вызова или во время установления соединения. Если измерение выполняется во время установления соединения, то сигнал, измеряемый в абонентском аппарате 106, является сигналом радиовызова, а сигнал, измеряемый в узловой станции 102, является сигналом доступа. Если измерение производится во время вызова, то сигналы, измеряемые в абонентском аппарате 106 и узловой станции, являются сигналами трафика. Специалистам будет понятно, что можно использовать и другие сигналы, не выходя за рамки объема изобретения.
IV. Способ определения местоположения
Описанные выше два параметра можно использовать для определения местоположения абонентского аппарата 106. Чтобы облегчить понимание изобретения, физические представления параметров показаны как изоконтуры параметров, спроецированные на поверхность Земли.
В предпочтительном варианте изобретения местоположение определяют на основе параметров дальности и скорости изменения дальности. На фиг.6 параметром дальности является R, а параметром скорости изменения дальности является ЗДПдоп. Здесь также показан один изоконтур R, обозначенный как 604, который образует окружность, представляющую дальность 2000 км между абонентским аппаратом 106 и спутником 104.
На фиг.6 показано семейство изоконтуров ЗДПдоп, в общем, позицией 606. Изоконтуры ЗДПдоп имеют вид гиперболы и расположены симметрично относительно вектора 616 скорости спутника 104. Каждый контур ЗДПдоп соединяет те точки на земной поверхности, которые испытывают одинаковый доплеровский сдвиг относительно спутника 104. Изоконтуры ЗДПдоп градуированы в кГц, при этом контур ЗДПдоп = 0 проходит через подлежащую точку 614 спутника 104.
У этого способа местоопределения есть два недостатка. Первый заключается в неоднозначности местоположения. Например, рассмотрим случай, в котором R=2000 км, а ЗДПдоп = +30 кГц. Как видно на фиг.6, контур R=2000 км пересекает контур ЗДПдоп = +30 кГц в двух точках 610А и 610В. Без дополнительной информации невозможно определить, находится ли абонентский аппарат 106 в точке 610А или точке 610В. Следовательно, это решение неоднозначно.
Второй недостаток заключается в так называемом "геометрическом ослаблении точности" (ГОТ), которое возникает, когда небольшая погрешность в измерениях приводит к большой погрешности в определении местоположения. Когда контуры дальности и скорости изменения дальности касаются или почти касаются друг друга, как показано в точке 610С на фиг.6, небольшая погрешность в любом параметре приведет к большой погрешности определения местоположения. Без дополнительной информации о местоположении способ определения местоположения только по параметрам дальности и скорости изменения дальности может быть подвержен воздействию ГОТ.
Эти проблемы можно решить, по меньшей мере, двумя путями. Во-первых, проблемы неоднозначности местоположения и ГОТ можно решить с помощью дополнительной информации. Эту информацию можно получить путем дополнительных измерений или использования других параметров, например какой луч спутника используется. Один такой метод описан в совместно рассматриваемой заявке того же заявителя на изобретение "Решение неоднозначности определения местоположения с помощью лучей спутника" за номером (не присвоен, дело патентного поверенного PD456). Во-вторых, эти проблемы можно решить, если начать с какой-то качественной оценки местоположения абонентского аппарата 106, например его последнего известного местоположения.
На фиг.8 представлен алгоритм, иллюстрирующий работу предпочтительного варианта изобретения. Один или несколько параметров дальности определяются, как было описано выше и показано этапом 802. Один или несколько параметров скорости изменения дальности определяются, как было описано выше и показано этапом 806. Затем определяют местоположение абонентского аппарата на поверхности Земли на основании известных положений и скоростей спутника и параметров дальности и скорости изменения дальности, как показано этапом 810 и описано ниже.
V. Выполнение определения местоположения
Прежде, чем приступить к подробному описанию определения местоположения, целесообразно сначала описать примерный вариант аппаратуры, в которой может быть реализован предложенный способ определения местоположения. На фиг.9 показана структурная схема, иллюстрирующая такую примерную аппаратуру. Эта аппаратура представляет собой вычислительную систему 900, которая может составлять часть управляющего процессора 220 и/или управляющего процессора 320. Вычислительная система 900 содержит один или несколько процессоров, таких как процессор 904. Процессор 904 подсоединен к связной шине 906. Разные варианты описываются в привязке к этой примерной вычислительной системе. Прочитав описание изобретения, специалист в области связи сможет понять, как реализовать способ определения местоположения согласно изобретению, используя другие вычислительные системы, архитектуры, аппаратные средства, справочные таблицы и т.п. и их разные комбинации.
Вычислительная система 900 содержит основное запоминающее устройство 908, предпочтительно, запоминающее устройство с произвольным доступом (ЗУПВ), и может также содержать вторичное запоминающее устройство 910. Вторичным запоминающим устройством 910 может быть, например, накопитель 912 на жестких магнитных дисках и/или съемный накопитель 914, такой как накопитель на гибких магнитных дисках, накопитель на магнитной ленте, накопитель на оптических дисках и т.п. Съемный накопитель 914 производит считывание и/или запись на съемный накопительный элемент 918 известным способом. Съемный накопительный элемент представляет собой гибкий диск, магнитную ленту, оптический диск и т.п. Понятно, что съемный накопительный элемент 918 содержит пригодный для вычислительных машин носитель данных с хранящимися на нем программами и/или данными.
В альтернативных вариантах вторичное запоминающее устройство 910 может содержать другие подобные средства, позволяющие загружать в вычислительную систему 900 программы или другие команды. Такими средствами могут быть, например, съемный накопительный элемент 922 и интерфейс 920. Например, можно использовать кассету с программой и кассетный интерфейс (как в видеоигровых устройствах), ЗУ на съемной микросхеме (например, ЭППЗУ или ППЗУ) и соответствующее гнездо, а также другие съемные накопительные элементы 922 и интерфейсы 920, которые позволяют передавать программы и данные со съемного накопительного элемента 922 в вычислительную систему 900.
Вычислительная система 900 может также содержать связной интерфейс 924. Связной интерфейс 924 позволяет пересылать программы и данные между вычислительной системой 900 и внешними устройствами по тракту 926 связи. Примерами связного интерфейса могут быть модем, сетевой интерфейс (например, карта Ethernet), связной порт и т.п. Программы и данные, пересылаемые через связной интерфейс 924, имеют форму сигналов, таких как электронные, электромагнитные, оптические и иные сигналы, которые может принимать связной интерфейс 924 по тракту 926 связи.
В дальнейшем описывается реализация способа определения местоположения с привязкой к этому примерному варианту аппаратуры. Однако, это сделано только для удобства описания. При этом не подразумевается, что способ определения местоположения согласно изобретению может быть реализован только в этой примерной аппаратуре. Фактически, прочитав следующее описание, специалист в области связи сможет понять, как реализовать предложенный способ определения местоположения в альтернативных аппаратных средствах.
В одном варианте настоящего изобретения местоположение абонентского аппарата 106 определяют посредством выполнения описанного ниже способа в вычислительной системе 900. Понятно, что способ определения местоположения можно реализовать в конечном автомате, справочными таблицами или т.п., не выходя за рамки объема изобретения.
Согласно предпочтительному варианту изобретения строится вектор М×1 параметров, обозначенный как z, который состоит из М параметров, используемых в определении местоположения. Вектор z может включать в себя один или несколько каждого из параметров, описанных выше. Как известно, эти параметры являются нелинейными функциями двухмерного вектора x местоположения абонентского аппарата

где индекс Т означает результат транспонирования матрицы или вектора, согласно

где вектор v для М×1 представляет погрешности измерений, a h - нелинейную функцию, которая описывает зависимость между измеренными параметрами и местоположением абонентского аппарата 106, h также является функцией положений и скоростей спутников 104А и 104В. В альтернативном варианте вектор x местоположения абонентского аппарата можно определить тремя декартовыми координатами, а не широтой и долготой, как показано в уравнении (7).

Согласно гауссовскому методу линеаризации, для определения местоположения абонентского аппарата 106 строится частная производная матрица Н для М×К, где К - число неизвестных местоположения, и в которой элемент (m, k) является частной производной m-того измерения относительно k-того параметра местоположения, определенного в заданном местоположении x. Например, если вектор местоположения описывает широту и долготу как в уравнении (5), то К=2, элементы в столбце k=1 матрицы Н описывают частные производные относительно широты абонентского аппарата 106, и элементы в столбце k=2 описывают частные производные относительно долготы абонентского аппарата 106. Если вектор местоположения выражен в декартовых координатах (К=3), то столбцы k=(1, 2, 3) в матрице Н соответственно относятся к координатам (x, у, z). При использовании декартовых координат применяется дополнительное уравнение, чтобы указать, что сумма квадратов координат равна квадрату радиуса Земли. Соотношение между x и Н определяется как
Для определения неизвестных параметров местоположения используется итеративный метод взвешенных наименьших квадратов. В предпочтительном варианте изобретения используется взвешенный метод Гаусса-Ньютона, описанный в работе H.W.Sorenson "Parameter Estimation - Principles and Problems", New York, Marcel Dekker, 1980. Итеративное уравнение получают из зависимости:

где  - оценки текущего и следующего местоположения, соответственно, a W - весовая матрица М×М. Индекс i представляет номер итерации, а i=0 представляет первую итерацию. Матрицы или векторы, основанные на оценке местоположения, отмечены верхним индексом "∧". В качестве исходной оценки местоположения выбирается какая-то опорная точка, например, последнее известное местоположение абонентского аппарата 106. Если последнее местоположение неизвестно, можно использовать любое местоположение, например, местоположение узловой станции 102.
- оценки текущего и следующего местоположения, соответственно, a W - весовая матрица М×М. Индекс i представляет номер итерации, а i=0 представляет первую итерацию. Матрицы или векторы, основанные на оценке местоположения, отмечены верхним индексом "∧". В качестве исходной оценки местоположения выбирается какая-то опорная точка, например, последнее известное местоположение абонентского аппарата 106. Если последнее местоположение неизвестно, можно использовать любое местоположение, например, местоположение узловой станции 102.

является частной производной матрицей, определенной по оценке текущего местоположения, а
являются ожидаемыми параметрами без ошибок, определенными с помощью оценки текущего местоположения. Итерации заканчиваются, когда разность между  опускается ниже заданного порога. Этот порог определяют проектировщики и/или операторы системы на основании точности системы с применением известных способов. Например, порог может быть основан на точности элементов сигнала в измерениях и скорости передачи элементов сигнала.
опускается ниже заданного порога. Этот порог определяют проектировщики и/или операторы системы на основании точности системы с применением известных способов. Например, порог может быть основан на точности элементов сигнала в измерениях и скорости передачи элементов сигнала.
Элементы весовой матрицы W для М×М являются средством, подчеркивающим влияние конкретных параметров на оценочное местоположение  , если параметров больше, чем неизвестных. В предпочтительном варианте весовая матрица W является диагональной матрицей, элементы которой отражают относительную точность, с которой можно определить каждый параметр. Следовательно, значения элементов устанавливаются на основании известных точностей измерений системы, как будет понятно специалистам. Поэтому параметру, основанному на очень точном измерении, придается больше значения, чем параметру, который невозможно измерить также точно. Элементы весовой матрицы инициализируются на заранее определенных значениях, но могут динамически корректироваться. Оптимальная точность достигается в том случае, если весовая матрица выбирается как обратная ковариационная матрица погрешностей измерения.
, если параметров больше, чем неизвестных. В предпочтительном варианте весовая матрица W является диагональной матрицей, элементы которой отражают относительную точность, с которой можно определить каждый параметр. Следовательно, значения элементов устанавливаются на основании известных точностей измерений системы, как будет понятно специалистам. Поэтому параметру, основанному на очень точном измерении, придается больше значения, чем параметру, который невозможно измерить также точно. Элементы весовой матрицы инициализируются на заранее определенных значениях, но могут динамически корректироваться. Оптимальная точность достигается в том случае, если весовая матрица выбирается как обратная ковариационная матрица погрешностей измерения.
Если погрешности измерений не зависят друг от друга и имеют нулевое среднее и расхождения

то W является диагональной матрицей с  в качестве диагональных элементов.
в качестве диагональных элементов.
При таком выборе W расхождение К-го элемента оценочного вектора x местоположения определяется как

И наконец, суммарная теоретическая ошибка горизонтального местоположения в единицах расстояния определяется как

где re - радиус Земли.
В предпочтительном варианте осуществления способа определения местоположения используется ровная эллипсоидная модель земной поверхности. В альтернативном варианте предложенного способа определения местоположения вначале используется ровная эллипсоидная модель земной поверхности, например модель WGS-84. Когда значения x сходятся до такой степени, что разность между  меньше заданного порога, вместо ровной модели подставляется детализированная цифровая модель поверхности Земли, и итерации продолжаются до тех пор, пока значения x не сойдутся в такой степени, что разность между
меньше заданного порога, вместо ровной модели подставляется детализированная цифровая модель поверхности Земли, и итерации продолжаются до тех пор, пока значения x не сойдутся в такой степени, что разность между  будет меньше второго заданного порога по расстоянию. Таким образом сглаживаются любые погрешности, введенные возвышением абонентского аппарата 106. В альтернативном варианте детализированная цифровая модель поверхности Земли подставляется после заданного количества итераций. Описанные выше значения порогов по расстоянию и количество итераций определяют согласно разным факторам, как будет понятно специалистам.
будет меньше второго заданного порога по расстоянию. Таким образом сглаживаются любые погрешности, введенные возвышением абонентского аппарата 106. В альтернативном варианте детализированная цифровая модель поверхности Земли подставляется после заданного количества итераций. Описанные выше значения порогов по расстоянию и количество итераций определяют согласно разным факторам, как будет понятно специалистам.
VI. Выводы
Несмотря на то, что выше были описаны разные варианты осуществления изобретения, понятно, что они были представлены только в качестве примера и не имеют ограничительного характера. Для специалистов в соответствующей области техники будут очевидны разные изменения в форме и деталях, не выходящие за рамки объема изобретения. Поэтому изобретение не ограничено ни одним из описанных выше примерных вариантов его осуществления, а определено только прилагаемой формулой изобретения и эквивалентами.
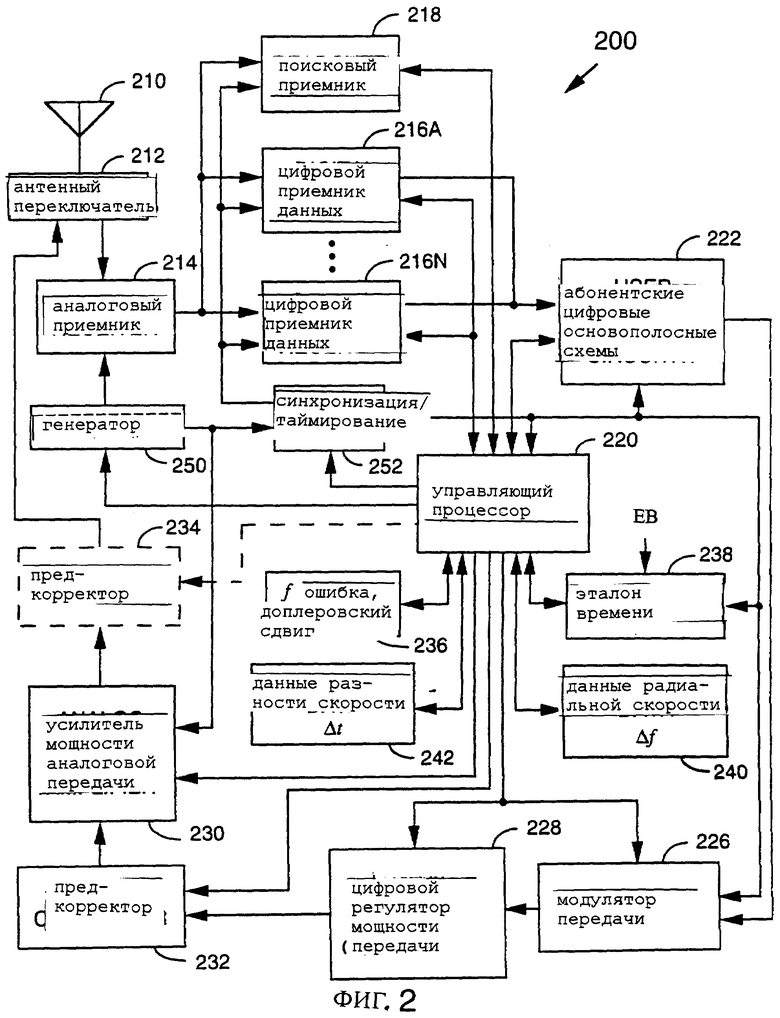
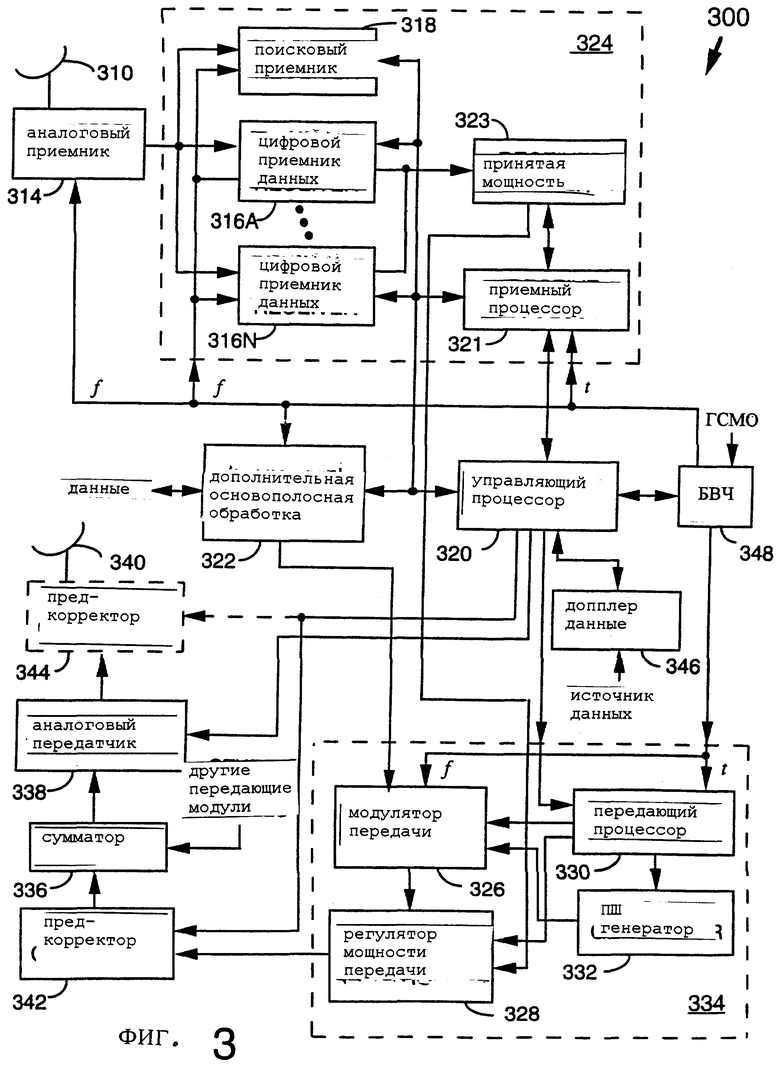
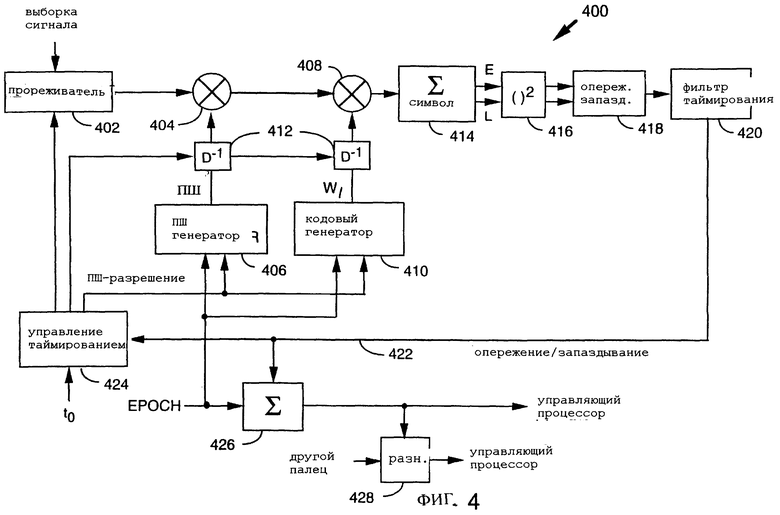
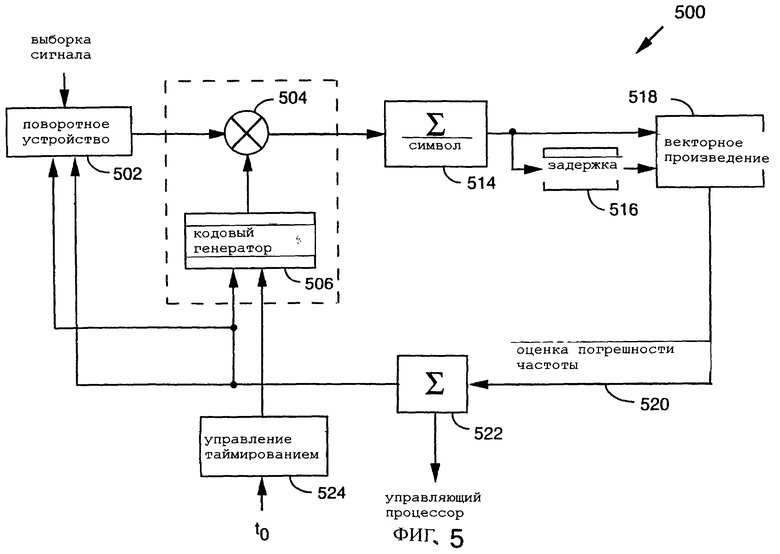
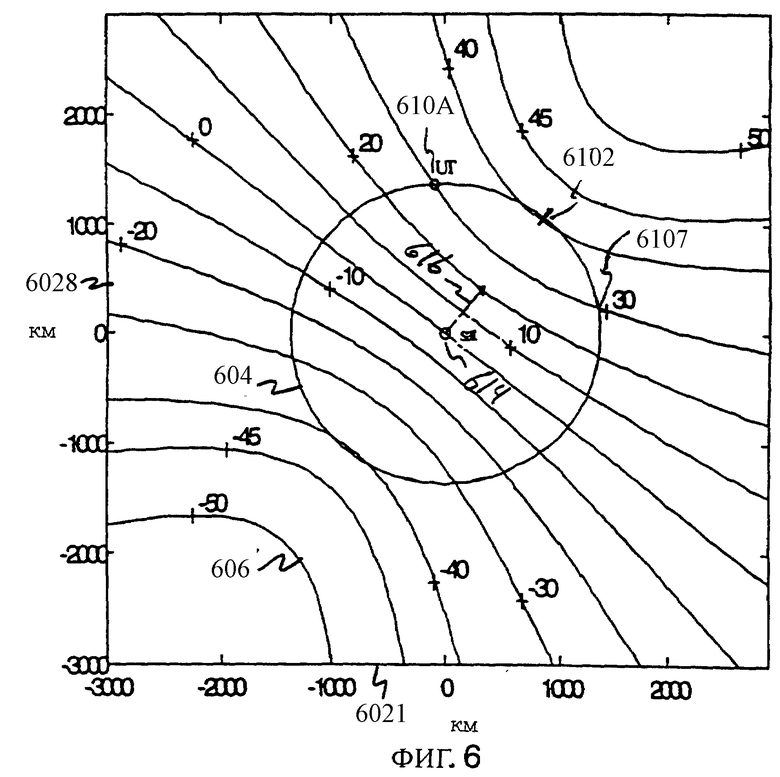
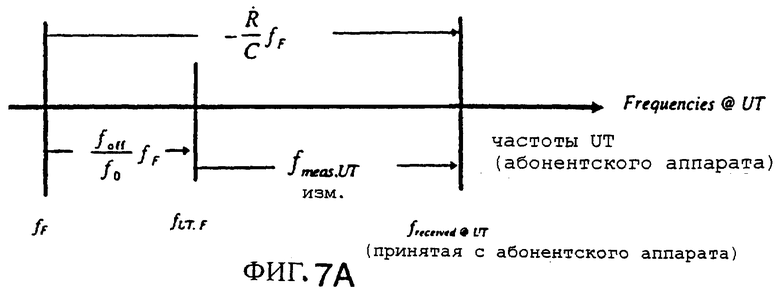
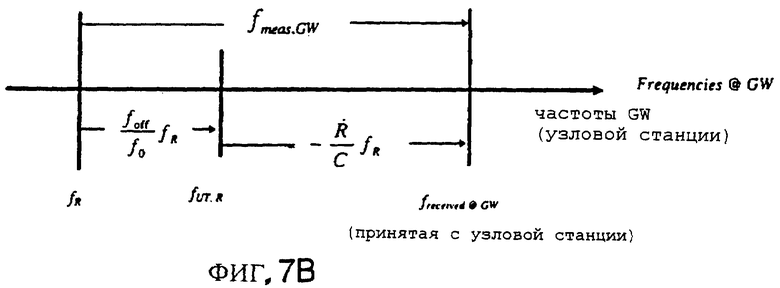
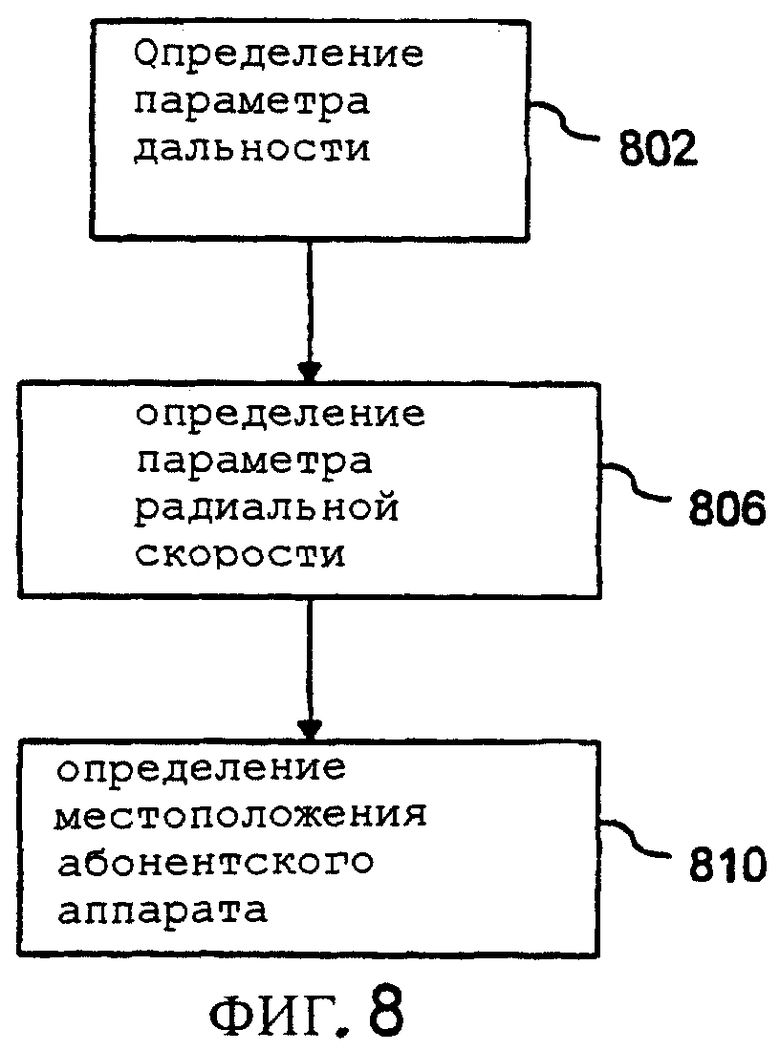
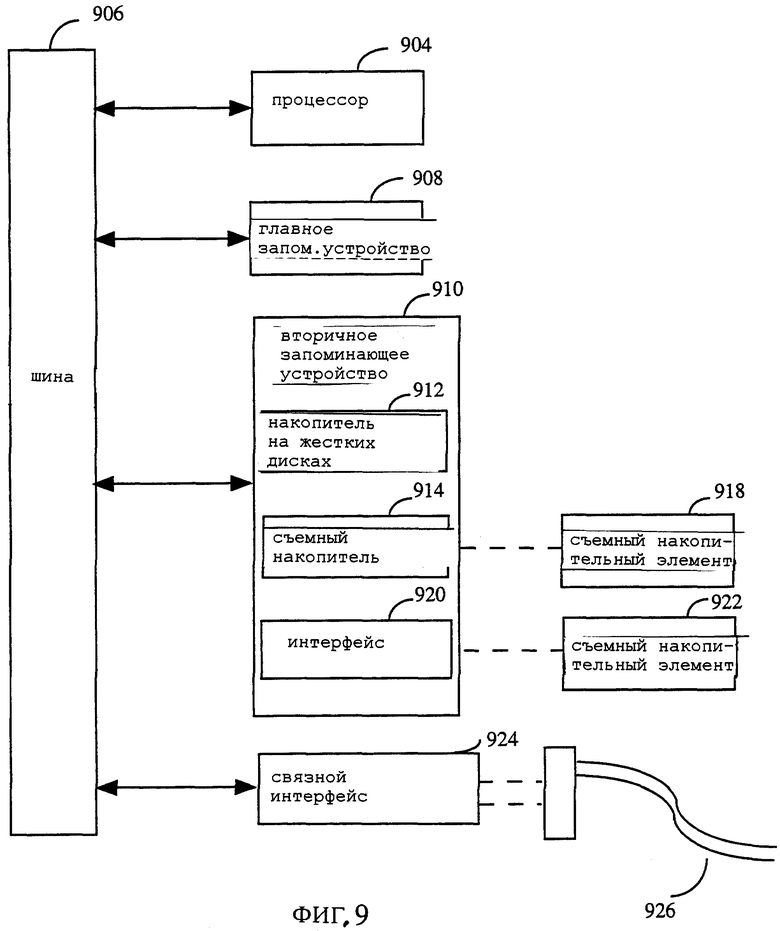
Система и способ для определения местоположения абонентского аппарата (например, мобильного радиотелефона) в системе связи со спутником на низкой околоземной орбите. Система содержит абонентский аппарат, по меньшей мере, один спутник с известными положением и скоростью и узловую станцию (т.е. наземную базовую станцию) для осуществления связи с абонентским аппаратом через спутник. Способ включает в себя определение параметра дальности и параметра скорости изменения дальности. Параметр дальности представляет собой расстояние между спутником и абонентским аппаратом. Параметр скорости изменения дальности представляет собой относительную радиальную скорость между этим спутником и абонентским аппаратом. Затем определяют местоположение абонентского аппарата на поверхности Земли на основании параметра дальности, параметра скорости изменения дальности и известных положения и скорости спутника. Достигаемым техническим результатом является быстрое определение местоположения абонентского аппарата с помощью одного спутника. 3 н. и 11 з.п. ф-лы, 9 ил.
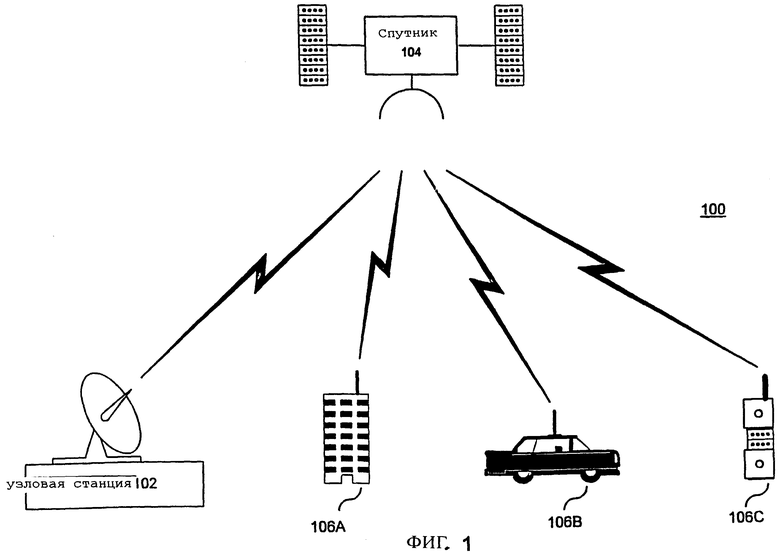
средство для формирования весовой матрицы W размером М×М, чтобы придать особое значение влиянию конкретных параметров, и средство для выполнения итеративного уравнения
 ,
,
где  являются соответственно оценками текущего и следующего положения, a i представляет номер итерации, до тех пор, пока разность между
являются соответственно оценками текущего и следующего положения, a i представляет номер итерации, до тех пор, пока разность между  не уменьшится ниже первого заданного порога, T-символ транспонирования.
не уменьшится ниже первого заданного порога, T-символ транспонирования.
 при использовании ровной эллипсоидной модели земной поверхности до тех пор, пока разность между
при использовании ровной эллипсоидной модели земной поверхности до тех пор, пока разность между  не уменьшится ниже второго заданного порога, и использования после этого детализированной цифровой модели земной поверхности.
не уменьшится ниже второго заданного порога, и использования после этого детализированной цифровой модели земной поверхности. при использовании ровной эллипсоидной модели земной поверхности в первых n итерациях и использования после этого детализированной цифровой модели земной поверхности, где n - заранее установленное число.
при использовании ровной эллипсоидной модели земной поверхности в первых n итерациях и использования после этого детализированной цифровой модели земной поверхности, где n - заранее установленное число.| US 5412388 А, 02.05.1995 | |||
| US 5500648 А, 19.03.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА И КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 1992 |
|
RU2022294C1 |
| RU 94026101 A1, 27.05.1996 | |||
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ДИСПЕРСИИ ПЕРИОДА РЕАКТИВНОСТИ ОРГАНИЗМА ЧЕЛОВЕКА | 2019 |
|
RU2721459C1 |

