Предлагаемое изобретение относится к гидроакустическим системам вертикального зондирования для определения глубины и может быть использовано в эхолотах с автоматическим адаптивным обнаружением эхо-сигналов от дна и измерением глубины.
Принцип работы эхолота основан на измерении времени распространения ультразвукового импульса от момента его излучения в акустическую среду до момента приема эхо-сигнала после отражения от дна, при этом согласно утверждению в работе "Применение ультразвука в медицине", под редакцией К. Хилла, М., Мир, 1989 г., стр. 240 (перечисление 5.2.2.2), следует, что в качестве реперной точки для отсчета времени распространения эхо-сигнала следует выбирать момент первого появления эхо-сигнала, а не момент времени, где амплитуда достигает максимального значения.
В статье М.А. Солдатова, П.В. Сорокин, А.А. Солдатов "Применение фазового метода для определения временного положения акустического импульса" УДК 621.3.088, Известия ЮФУ. Технические науки №9, 2010, стр. 97-101, изд. Технологического института Южного федерального университета, http://www.nich.tsure.ru/onti/izv.htm., описан метод определения временного положения акустического импульса, позволяющий уменьшить погрешность измерения времени распространения сигнала в акустическом тракте измерительного прибора, в котором используется зависимость длительности импульса, получаемого с выхода компаратора при сравнении синусоидальных колебаний нарастающей амплитуды с фиксированным уровнем от их амплитуды в каждом периоде сигнала, при этом информация о наклоне огибающей импульсного сигнала содержится в длительностях серии прямоугольных импульсов, сформированных на выходе компаратора. Однако этот метод можно применять только для эхо-сигналов с малой крутизной переднего фронта огибающей эхо-сигнала и для частот, период повторения которых можно измерить с погрешностью не менее 1%., и что для реализации этого метода потребует применения чрезвычайно высокоскоростного АЦП преобразователя, также крутизна переднего фронта огибающей эхо-сигнала в гидроакустике зависит от акустической жесткости грунта и может изменяться в широких пределах, от крутой до пологой.
Известна акустическая система измерения расстояния, описанная в Европейском патенте "Акустическая система измерения расстояния", №0340953, G01S 7/52, G01S 15/88, которая содержит микропроцессор, память, ряд интерфейсов, цифроаналоговый преобразователь, дисплей, передатчик, приемник, аналого-цифровой преобразователь, электроакустический преобразователь.
В этой акустической системе измерения расстояния передатчик постоянной мощности периодически производит излучение, а приемник выполнен логарифмическим, то есть его коэффициент усиления по логарифмическому закону зависит от амплитуды входного сигнала. Выходной сигнал с приемника оцифровывается аналого-цифровым преобразователем, и поступает на обработку в микропроцессор для обнаружения эхо-сигнала от дна и измерения расстояния до него, причем используется адаптивный порог обнаружения, уровень которого зависит как от амплитуды сигнала, так и от уровня шумов, что позволяет уверенно обнаруживать эхо-сигналы от дна на фоне акустических и электрических шумов и ложных эхо-сигналов.
Однако излучение постоянной мощности и логарифмическая зависимость коэффициента усиления не позволяют полностью скомпенсировать уменьшение амплитуды эхо-сигналов с увеличением глубины, то есть не позволяют добиться оптимального, с точки зрения погрешности измерения, соотношения сигнал/помеха для каждой конкретной глубины и коэффициента обратного рассеяния от границы раздела двух сред, а это не позволяет минимизировать погрешность измерения глубины, обусловленную изменяющимся уровнем гидроакустических шумов.
В этой акустической системе измерения расстояния за время распространения эхо-сигнала принимается момент времени, когда амплитуда его переднего фронта будет равна адаптивному порогу, при этом не учитывается крутизна его переднего фронта, абсолютная амплитуда и уровень акустических шумов в гидроакустическом канале и электрических шумов в его приемном тракте, от которых зависит амплитуда адаптивного порога в момент сравнения, а это приводит к дополнительной погрешности измерения глубины.
Наиболее близким по совокупности признаков к предлагаемому эхолоту является эхолот, описанный в патенте РФ №2241242, опубликовано 27.11.2004, GO1S15/08.
Этот эхолот содержит последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к микроконтроллеру, блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления.
Блок временной автоматической регулировки усиления (ВАРУ) служит для уменьшения погрешности измерение времени распространения эхо-сигнала, которая зависит от изменяющегося уровня акустических и электрических шумов и крутизны переднего фронта эхо-сигнала. Блок ВАРУ автоматически компенсирует уменьшение амплитуды эхо-сигнала с увеличением глубины, посредством пропорционального увеличения коэффициента усиления приемника, а для обеспечения необходимого соотношения сигнал-помеха в зависимости от текущей глубины и коэффициента обратного рассеяния от дна в передатчике мощность излучения, а в приемнике коэффициент усиления регулируются ступенчато, что в свою очередь поддерживает амплитуду огибающей эхо-сигнала в заданном диапазоне амплитуд в соответствии с алгоритмом работы эхолота, и при этом не происходит ни ограничения амплитуды эхо-сигнала, ни чрезмерного усиления акустических и электрических шумов.
Существенным недостатком данного эхолота - прототипа является то, что за время распространения эхо-сигнала принимается момент времени, когда амплитуда его переднего фронта будет равна адаптивному порогу, при этом не учитывается крутизна его переднего фронта, абсолютная амплитуда и уровень акустических шумов в гидроакустическом канале распространения эхо-сигнала и электрических шумов в его приемном тракте, от которых зависит амплитуда адаптивного порога в момент сравнения, а это приводит к дополнительной погрешности измерения глубины, так как чем выше амплитуда адаптивного порога и меньше крутизна переднего фронта огибающей эхо-сигнала, тем выше погрешность определения времени распространения эхо-сигнала от дна.
Задачей изобретения является повышение точности измерения глубины за счет снижения погрешностей, обусловленных акустической помехой на входе электроакустического преобразователя, электрическими шумами приемного тракта эхолота и конечным значением крутизны фронта эхо-сигнала.
Технический результат заключается в уменьшении погрешности измерения времени распространения эхо-сигнала в акустической среде путем интерполяции переднего фронта огибающей эхо-сигнала, что исключает завышение оценки времени распространения эхо-сигнала в акустической среде вследствие действия акустической помехи на входе электроакустического преобразователя и электрических шумов приемного тракта эхолота.
Для решения поставленной задачи в эхолот, содержащий последовательно соединенные первый микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с первым микроконтроллером, а также, электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к первому микроконтроллеру, блок временной автоматической регулировки усиления, вход которого соединен с первым микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к первому микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления подключен к первому микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления, введены новые признаки, а именно: в него введен второй микроконтроллер, обеспечивающий определение временного положения эхо-сигнала, первый вход и выход которого подключены к первому микроконтроллеру, а второй вход к выходу аналого-цифрового преобразователя.
Поясним возможность достижения технического результата.
Известно (Хребтов А.А. и др. Судовые эхолоты. Л., Судостроение, 1982 г., стр. 80, 81.), что при измерении глубины точность измерения зависит от погрешностей, обусловленных шумами и конечным значением крутизны переднего фронта эхо-сигнала. Также известно, что при распространении сигналов в дисперсионных средах большее затухание высокочастотных составляющих спектра эхо-сигнала приводит к его заметному уширению во, времени, то есть к искажению формы эхо-сигнала и расширению его фронтов. Отличная от нуля добротность электроакустического преобразователя (ЭАП) вносит большой вклад в расширение фронтов эхо- сигнала. Известно, что поскольку ЭАП является электро-механическим преобразователем с конечной добротностью Q, то давление зондирующего сигнала, создаваемое им, достигает максимума примерно через Q периодов частоты, на которой он работает. Все указанные погрешности приводят к завышению оценки времени распространения эхо-сигнала в акустической среде.
Уменьшить влияние этих погрешностей на погрешность измерения времени распространения эхо-сигнала в акустической среде возможно путем введения микроконтроллера 2, производящего интерполяции переднего фронта огибающей эхо-сигнала от дна, обеспечивающего определении начала эхо-сигнала от дна, как момента времени, когда амплитуда огибающей эхо-сигнала от дна равно 0, что исключает завышение оценки времени распространения эхо-сигнала в акустической среде в следствии действия акустической помехи на входе электроакустического преобразователя, электрических шумов приемного тракта эхолота и конечной длинны переднего фронта эхо-сигнала.
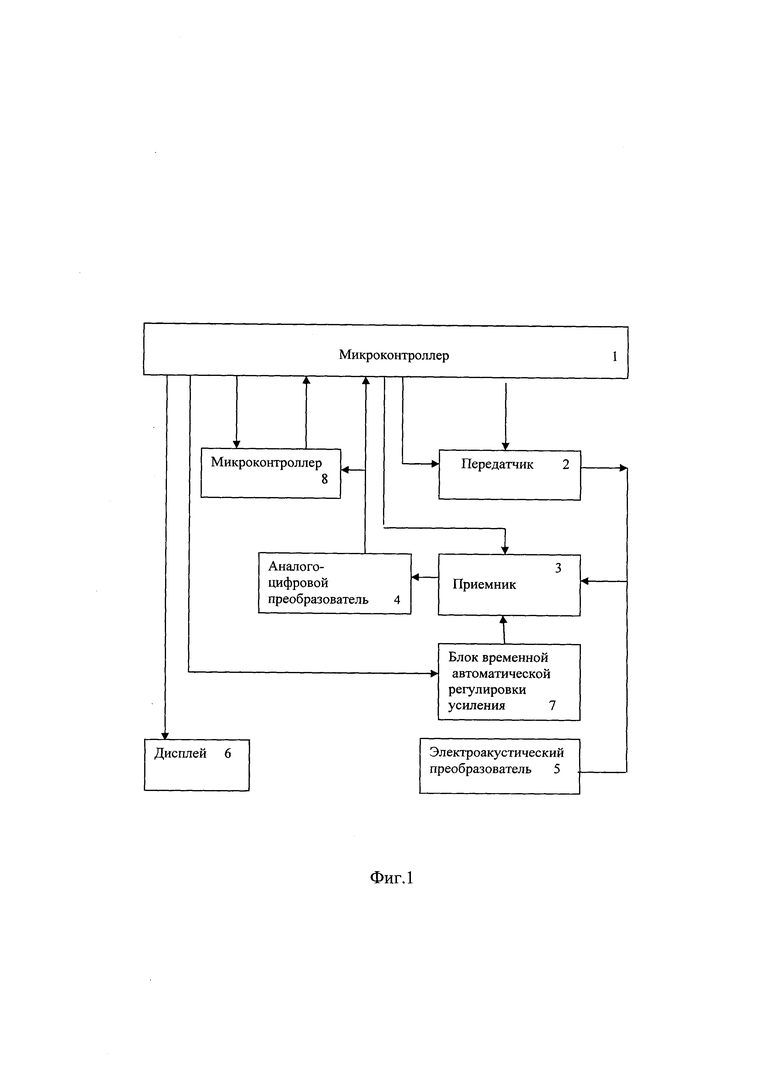
Сущность предлагаемого изобретения представлена на фиг. 1, и фиг. 2, где на фиг. 1 приведена блок-схема заявленного эхолота, на фиг. 2 изображена огибающая эхо-сигнала и амплитудные и временные координаты точек огибающей эхо-сигнала.
Эхолот (фиг. 1) содержит микроконтроллера 1 (МК 1), первый выход которого подключен к первому входу передатчика 2, для формирования периода излучения Т и длительности зондирующего импульса Тиз. Второй выход МК 1 соединен со вторым входом передатчика 2 для осуществления ступенчатой регулировки мощности излучения передатчика 2. Выход передатчика 2 соединен со входом приемника 3 и электроакустическим преобразователем 5 (ЭАП). В режиме приема электроакустический преобразователь 5 соединен со входом приемника 3. Первый вход регулировки усиления приемника 3 подключен к третьему выходу микроконтроллера 1, для ступенчатой регулировки его коэффициент усиления, а второй вход регулировки усиления приемника 3 соединен с выходом блока временной автоматической регулировки усиления 7 (ВАРУ), вход которого подключен к четвертому выходу микроконтроллера 1, для синхронного с формированием зондирующего импульса запуска формирования напряжение ВАРУ. Выход приемника 3 соединен со входом аналого-цифровой преобразователь 4 (АЦП), выход которого соединен с первым входом микроконтроллера 1 и первым входом микроконтроллера 2 для передачи цифрового массива огибающей эхо-сигнала. Вход дисплея 6 соединен с пятым выходом МК 1 для отображения измеренной глубины. Первый вход второго микроконтроллера 8 (МК2) подключен в шестому выходу микроконтроллера 1, для ввода данных двух точек огибающей эхо-сигнала от дна, то есть о результате обработки исходного массива огибающей эхо-сигнала микроконтроллером 1. Выход микроконтроллера 8 подключен ко второму входу микроконтроллера 1 для передачи значения времени начала огибающей эхо-сигнала от дна.
Предлагаемый эхолот работает следующим образом.
В каждом цикле зондирования передатчик 2 излучает на рабочей частоте зондирующий импульс длительность с периодом Т, которые формирует микропроцессор 1, и блок ВАРУ 7 запускается синхронно с излучением зондирующего импульса передатчиком 2 через ЭАП 5 в среду распространения зондирующего импульса. Блок ВАРУ 7 пропорционально временному уменьшению амплитуды эхо-сигнала вследствие пространственного затухания увеличивает коэффициент усиления приемника 3 по второму входу приемника 3, тем самым стационаризируется уровень эхо-сигнала в пределах действия динамического диапазона блока ВАРУ 7. Принятый эхо-сигнал со сжатым под действием ВАРУ 7 динамическим диапазоном с выхода приемника 3 оцифровывается блоком АЦП 4 с временем преобразования tацп на всем интервале времени Т и вводится в МК 1 в виде массива последовательных отсчетов. В МК 1 этот исходный массив отсчетов огибающей эхо-сигнала обрабатывается согласно алгоритму, описанному в прототипе. В каждом цикле излучение-прием МК 1 производит в исходом массиве отсчетов огибающей эхо-сигнала обнаружение огибающей эхо-сигнала от дна при этом выделяется ряд отсчетов, составляющих эхо-сигнал от дна. Затем МК 1 определяет из этого ряда отсчетов, отсчет с максимальной амплитудой эхо-сигнала Am и соответствующие времени tm (см. фиг. 2).
Далее МК 1 запускает, согласно алгоритму работы прототипа, алгоритм определения начала эхо-сигнала от дна, то есть определение соответствующего отсчета Ад из исходного массива отсчетов согласно алгоритму

где i - номер отсчета АЦП, и N≥i≥1;
Ai - амплитуда i-го отсчета;
N - число отсчетов АЦП за период излучения Т, N=T/tацп;
К - коэффициент, К1≥1, К2≥1 обеспечивают обнаружение начала эхо-сигнала в присутствии шумов;
m - номер отсчета, соответствующий максимальной амплитуде в огибающей эхо-сигнала от дна.
То есть МК 1 осуществляет перебор отсчетов огибающей эхо-сигнала от дна, начиная от точки Д (см. фиг. 2) с координатами Am,tm, в сторону уменьшения номера отсчета i до нахождения точки перегиба А огибающей эхо-сигнала (Ан,tн) (см. фиг. 2). Далее микроконтроллер 1 (МК 1) пересылает результаты свой работы в микроконтроллер 8 по его первому входу - координаты для двух точек А и Д огибающей эхо-сигнала от дна - значения амплитуды и времени, а именно - для точки Д с максимальной амплитудой (Am,tm) и точки перегиба А огибающей эхо-сигнала от дна (An,tn), причем время ti рассчитывается по формуле
где taцп - время преобразования блока АЦП 4,
i - номер отсчета АЦП от начала излучения зондирующего импульса.
Затем микроконтроллер 8 выбирает из принятого массива отсчетов огибающей эхо-сигнала принятого от блока АЦП 4 по его второму входу амплитуду Ав соответствующую времени tв, рассчитанного по формуле:

Далее микроконтроллер 8, по двум точка А и В массива огибающей эхо-сигнала с координатами An,tn и Ав,tв, использую уравнение прямой (Воднев В.Г и др., "Математический словарь высшей школы", М, изд. МПИ, 1989 г., стр. 472) интерполируя, вычисляет координаты точки С в огибающей эхо-сигнала от дна - время tк, где амплитуда огибающей эхо-сигнала будет равна нулю и это время rк и определяет время распространения эхо-сигнала, по формуле:

Затем микроконтроллер 8 передает значение времени tк в МК 1 эхолота.
Далее МК 1 вычисляет глубину Н до дна по формуле
где tк - время распространения эхо-сигнала (начало огибающей эхо-сигнала от дна);
СЗВ - скорость звука в среде;
и выводит числовое значение глубины Н на дисплей 6.
Затем начинается новый цикл излучение-прием, в котором описанные процедуры обнаружения эхо-сигнала от дна, установления его амплитуды в заданных пределах путем ступенчатого изменения излучаемой мощности и коэффициента усиления премного тракта, определения начала его огибающей, вычисления глубины и вывод ее на дисплей повторяются.
Таким образом, из рисунка на фиг. 2 следует, что микроконтроллер 8 путем интерполяции переднего фронта огибающей эхо-сигнала, исключает завышение оценки времени распространения эхо-сигнала в акустической среде, так как истинное начало огибающей эхо-сигнала от дна начинается в момент времени tк, а не в момент времени tn, которое ошибочно определяется в прототипе, как начало огибающей эхо-сигнал от дна, поскольку маскируется действием акустической помехи на входе электроакустического преобразователя и электрических шумов приемного тракта эхолота и конечной длинны фронта огибающей эхо-сигнала, которые и определяют значение амплитуды огибающей эхо-сигнала An в момент времени tn. Таким образом, временная разница Δt между точками А и С (см. фиг. 2),

и представляет собой величину завышение оценки времени распространения эхо-сигнала в акустической среде.
Техническая реализация предложенного изобретения для современного уровня развития микроэлектроники не вызывает сомнения, и отметим то, второй микроконтроллер 8 следует выполнить на основе микроконтроллера с интегрированными интерфейсами.
Таким образом, эхолот, созданный на основе предлагаемого изобретения, обладает повышенной точность измерения глубины и исключает завышение оценки времени распространения эхо-сигнала в акустической среде в следствии действия акустической помехи на входе электроакустического преобразователя и электрических шумов приемного тракта эхолота и времени нарастания переднего фронта огибающей эхо-сигнала, которое зависит от ряда факторов - дисперсии в среде распространения эхо-сигнала, добротности ЭАП 5 и полосовой + фильтрации в приемном тракте эхолота - приемнике 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| Эхолот | 2023 |
|
RU2828233C1 |
| ЭХОЛОТ С ЛЕДОВОЙ ЗАЩИТОЙ | 2013 |
|
RU2523104C1 |
| ЭХОЛОТ | 2009 |
|
RU2390796C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| ЭХОЛОТ ДЛЯ РАСПОЗНАВАНИЯ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2007 |
|
RU2348054C1 |
| Эхолот | 2019 |
|
RU2719210C1 |
| ЭХОЛОТ | 2012 |
|
RU2523101C2 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 2004 |
|
RU2292529C2 |
| Малоразмерный ультразвуковой измеритель расстояния | 2019 |
|
RU2720640C1 |
Использование: эхолот относится к гидроакустическим системам определения глубины и может быть применен для автоматического обнаружения эхо-сигналов дна и измерения глубины с повышенной точностью. Технический результат: повышение точности измерения глубины. Сущность: обеспечение технического результата достигается введением второго микроконтроллера и интерполяцией переднего фронта огибающей эхо-сигнала, что исключает завышение оценки времени распространения эхо-сигнала в акустической среде вследствие действия акустической помехи на входе электроакустического преобразователя и электрических шумов приемного тракта эхолота. 1 ил.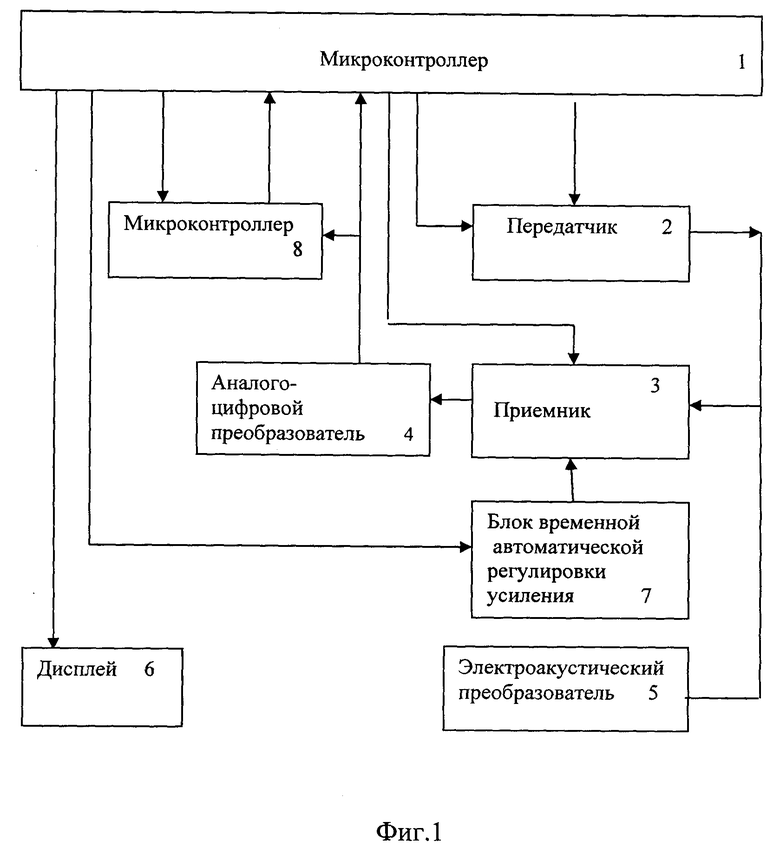
Эхолот, содержащий последовательно соединенные первый микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с первым микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к первому микроконтроллеру, блок временной автоматической регулировки усиления, вход которого соединен с первым микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к первому микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления, подключен к первому микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления, отличающийся тем, что в него введен второй микроконтроллер, обеспечивающий определение временного положения эхо-сигнала, первый вход и выход которого подключены к первому микроконтроллеру, а второй вход к выходу аналого-цифрового преобразователя.
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| ЭХОЛОТ | 2009 |
|
RU2390796C1 |
| Эхолот | 2019 |
|
RU2719210C1 |
| Станок для электроэрозийной резки | 1960 |
|
SU133328A1 |
| US 4873676 A1, 10.10.1989 | |||
| US 9986969 B2, 05.06.2018. | |||

