Область техники, к которой относится изобретение
Настоящее изобретение относится в общем к области связи и в частности к формированию сообщений измерения силы контрольного канала в системе радиосвязи.
Описание известного уровня техники
В области радиосвязи существует ряд основанных на технологии стандартов для управления сеансами связи между подвижной станцией, такой как сотовый телефон, аппарат персональной системы связи (ПСС), или другим абонентским средством дистанционной связи и базовой радиостанцией. Эти стандарты включают в себя стандарты как цифровой связи, так и аналоговой связи. Среди стандартов цифровой связи для сотовой связи можно назвать стандарты серии IS-95, разработанные Ассоциацией промышленности средств телекоммуникации и Ассоциацией электронной промышленности (TIA/EIA), включающие в себя стандарты IS-95A и IS-95B под названием "Стандарт совместимости подвижной станции и базовой станции для двухрежимной системы сотовой связи с расширением спектра". Среди цифровых стандартов для ПСС существует ряд стандартов серии J-STD-008 Американского национального института стандартов (ANSI) под названием "Требования к совместимости персональной станции и базовой станции для систем персональной связи, работающих на частоте 1,8 и 2,0 ГГц по принципу многостанционного доступа с кодовым разделением каналов (МДКР)".
Другие цифровые стандарты, не относящиеся к МДКР, включают в себя Глобальную систему подвижной связи (GSM), построенную на принципе многостанционного доступа с временным разделением каналов (МДВР), и стандарт США TIA/EIA серии IS-54 на принципах МДВР.
Метод модуляции с расширением спектра, применяемый в МДКР, обладает существенными преимуществами по сравнению с другими методами модуляции для систем связи с многостанционным доступом. Использование методов МДКР в системе связи с многостанционным доступом описано в патенте США №4901307, выданном 13 февраля 1990 г. на изобретение "Система связи с многостанционным доступом с расширенным спектром, использующая спутниковые или наземные ретрансляторы", права на который переуступлены правопреемнику настоящего изобретения и который упоминается здесь для сведения.
Пространственное разнесение или разнесение трасс достигается за счет обеспечения нескольких трасс прохождения сигнала по одновременным линиям связи от подвижного абонента через два или более сотовых узла. Кроме того, разнесение трасс можно обеспечить за счет использования среды с многолучевым распространением путем обработки с расширенным спектром с раздельным приемом и обработкой сигнала, приходящего с разными задержками на распространение. Примеры разнесения трасс проиллюстрированы в патенте США №5101501, выданном 31 марта 1992 г., на изобретение "Мягкое переключение каналов связи в сотовой телефонной системе МДКР" и патенте США №5109390, выданном 28 апреля 1992 г., на изобретение "Приемник с разнесением в сотовой телефонной системе МДКР", права на которые переуступлены правопреемнику настоящего изобретения и которые упоминаются здесь для сведения.
Отрицательное влияние замирания можно в некоторой степени дополнительно контролировать в системе МДКР посредством регулирования мощности передатчика. В патенте США №5056109, выданном 8 октября 1991 г., на изобретение "Способ и устройство для регулирования мощности передачи в системе подвижной телефонной связи МДКР" по заявке 07/433031, поданной 7 ноября 1989, права на который переуступлены правопреемнику настоящего изобретения и который упоминается здесь для сведения, описана система регулирования мощности сотового узла и подвижного аппарата. Использование методов МДКР в системе связи с многостанционным доступом также описано в патенте США №5103459, выданном 7 апреля 1992 г., на изобретение "Система и способ для формирования сигналов в системе сотовой телефонной связи МДКР", права на который переуступлены правопреемнику настоящего изобретения и который упоминается здесь для сведения.
Во всех перечисленных выше патентах описано использование пилот-сигнала для вхождения в синхронизм в системе радиосвязи МДКР. В разное время при включении аппарата радиосвязи, такого как сотовый телефон или аппарат ПСС, он подвергается процедуре вхождения в синхронизм, которая включает в себя, помимо прочего, поиск и обнаружение сигнала пилот-канала от базовой станции в данной системе радиосвязи. Например, более подробно демодуляция и вхождение в синхронизм с контрольным каналом в системе МДКР описаны в совместно рассматриваемой заявке США 08/509721 на изобретение "Способ и устройство для осуществления поиска и вхождения в синхронизм в системе связи МДКР", права на которую переуступлены правопреемнику настоящего изобретения и которая упоминается здесь для сведения. Если устройство радиосвязи может войти в синхронизм с более чем одним пилот-каналом, он выбирает пилот-канал с наиболее сильным сигналом. После установления синхронизма с пилот-каналом устройство радиосвязи получает возможность вхождения в синхронизм с дополнительными каналами от базовой станции, которые необходимы ему для осуществления связи. Структура и функции этих других каналов более подробно описаны в упомянутом выше патенте США №5103469 и здесь не описываются подробно.
Целью процедуры вхождения в синхронизм для поиска и захвата сигналов пилот-канала от базовой станции является нахождение потенциальных базовых станций-кандидатов для переключения каналов связи. Базовые станции, являющиеся жизнеспособными кандидатами, можно разделить на четыре группы. Эти группы используются для ранжирования контрольных каналов по приоритету и повышения эффективности поиска. Первая группа, именуемая активным набором, содержит базовые станции, которые в данный момент находятся на связи с данной подвижной станцией. Вторая группа, именуемая набором кандидатов, содержит базовые станции, в отношении которых было установлено, что они имеют достаточный уровень сигнала для использования данной базовой станцией. Базовые станции добавляются в набор кандидатов, когда измеренная энергия их пилот-каналов превосходит заданный порог ТADD. Третья группа является набором соседей, т.е. набором базовых станций, находящихся вблизи от данной подвижной станции (и не включенных в активный набор или набор кандидатов). И четвертую, или набор остальных станций, образуют все другие базовые станции.
В системе связи IS-95A подвижная станция посылает автономное сообщение измерения уровня пилот-канала (СИУПК), когда она находит пилот-канал с достаточным уровнем, не связанный ни с одним из прямых каналов трафика, демодулируемых в данный момент, или когда уровень пилот-канала, связанного с одним из демодулируемых прямых каналов трафика, падает ниже некоторого порога в течение заданного интервала времени. Понятие "пилот-канал" относится к пилот-каналу, идентифицированному сдвигом пилот-последовательности и назначением частоты. Подвижная станция посылает автономное СИУПК после обнаружения изменения уровня пилот-канала, когда удовлетворено одно из следующих условий:
1. Обнаружено, что уровень пилот-канала набора соседей или набора остальных станций превосходит порог (TADD).
2. Уровень пилот-канала набора кандидатов превосходит уровень пилот-канала активного набора на величину, превосходящую порог (ТСОМР)×0,5 дБ, и СИУПК, несущее эту информацию, не было послано с тех пор, как было принято последнее сообщение о направлении переключения каналов связи (СНП) или расширенное сообщение о направлении переключения каналов связи (РСНП).
3. Уровень пилот-канала в активном наборе или наборе кандидатов упал ниже некоторого порога (ТDROP) больше, чем на заданный интервал времени (ТTDROP), и СИУПК, несущее эту информацию, не было послано с тех пор, как было принято последнее СНП или РСНП.
ТADD - это порог, выше которого принятый сигнал имеет достаточный уровень для обеспечения эффективной связи с данной подвижной станцией. ТDROP - это пороговое значение, ниже которого энергия принимаемого сигнала недостаточна для эффективного обеспечения связи с данной подвижной станцией.
В системе связи IS-95B подвижная станция посылает автономное СИУПК в соответствии с одним из двух наборов правил, выбранным базовой станцией. Первый набор правил идентичен правилам, установленным в стандарте IS-95A. Второй набор правил использует динамичный порог, который определяется следующим образом

где параметры SOFT_SLOPE и ADD_INTERCEPT задаются базовой станцией и данное суммирование выполняется для всех пилот-каналов в активном наборе. Ec/Io - это отношение энергии пилот-канала на один элемент сигнала к общей принятой спектральной плотности шума и сигналов.
Согласно второму набору правил IS-95A подвижная станция посылает автономное СИУПК, если выполнено одно из следующих условий:
1. Обнаружено, что уровень пилот-канала набора кандидатов превосходит ТDYN и СИУПК, несущее эту информацию, не было послано с тех пор, как было принято последнее РСНП или общее сообщение о направлении переключения каналов связи (ОСНП).
2. Обнаружено, что уровень пилот-канала набора соседей или набора остальных станций превосходит max (TDYN, TADD/2).
3. Уровень пилот-канала набора кандидатов превосходит уровень любого пилот-канала активного набора на TCOMP×0,5 дБ и выше TDYN, и СИУПК, несущее эту информацию, не было послано с тех пор, как было принято последнее сообщение РСНП или ОСНП.
4. Истекло время таймера сброса переключения каналов связи пилот-канала в активном наборе, и СИУПК, несущее эту информацию, не было послано с тех пор, как было принято последнее РСНП или ОСНП.
Правила согласно стандартам IS-95A и IS-95B разработаны для систем с одной несущей, которые используют канал 1,25 МГц как на прямой, так и на обратной линии связи. Однако в системе с несколькими несущими подвижная станция принимает пилот-канал базовой станции одновременно на нескольких несущих частотах. Например, в системе с несколькими несущими 3Х/1Х может использоваться три канала 1,25 МГц на прямой линии связи и один канал 1,25 МГц на обратной линии связи. Другой пример - система с несколькими несущими 3Х/3Х, в которой используется три канала 1,25 МГц на прямой линии связи и канал 3,75 МГц на обратной линии связи. В любом из этих примеров может наблюдаться кратковременное замирание, различное на разных несущих частотах. В такой ситуации правила IS-95, руководящие автономной передачей СИУПК, не пригодны при наличии пилот-каналов на нескольких несущих пилот-канала. Следовательно, существует потребность в определении, когда подвижная станция передает автономное СИУПК согласно приему сигналов нескольких пилот-каналов от базовых станций в системах с несколькими несущими.
Сущность изобретения
В основу настоящего изобретения положена задача создания способа и устройства для формирования автономного сообщения измерения уровня пилот-канала (СИУПК) подвижной станцией в системе радиосвязи с несколькими несущими, в котором в подвижной станции принимают множество пилот-каналов, передаваемых по меньшей мере из одной базовой станции; используют первое определение уровня пилот-канала из группы определений уровня пилот-канала для определения уровня сигнала пилот-канала, связанного по меньшей мере с одним из нескольких пилот-каналов; проверяют набор правил, предназначенный для формирования СИУПК, посредством манипулирования первым определением уровня сигнала пилот-канала и формируют СИУПК для передачи из подвижной станции.
В одном аспекте изобретения в наборе правил используются различные определения уровня сигнала пилот-канала посредством применения одного определения уровня сигнала пилот-канала в одном правиле и применения другого определения уровня сигнала пилот-канала в другом правиле. В другом аспекте изобретения СИУПК, сформированное подвижной станцией, несет информацию об уровне сигнала пилот-канала, которая не использовалась для формирования СИУПК.
Краткое описание чертежей
Фиг.1 схематически изображает примерный вариант системы радиосвязи,
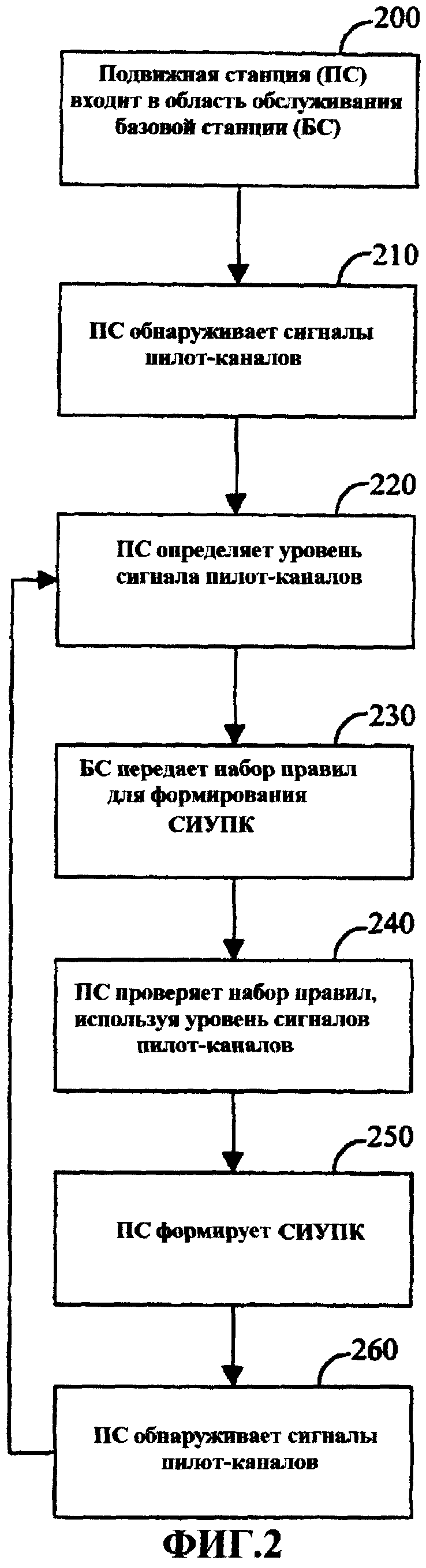
фиг.2 иллюстрирует последовательность операций в варианте осуществления изобретения,
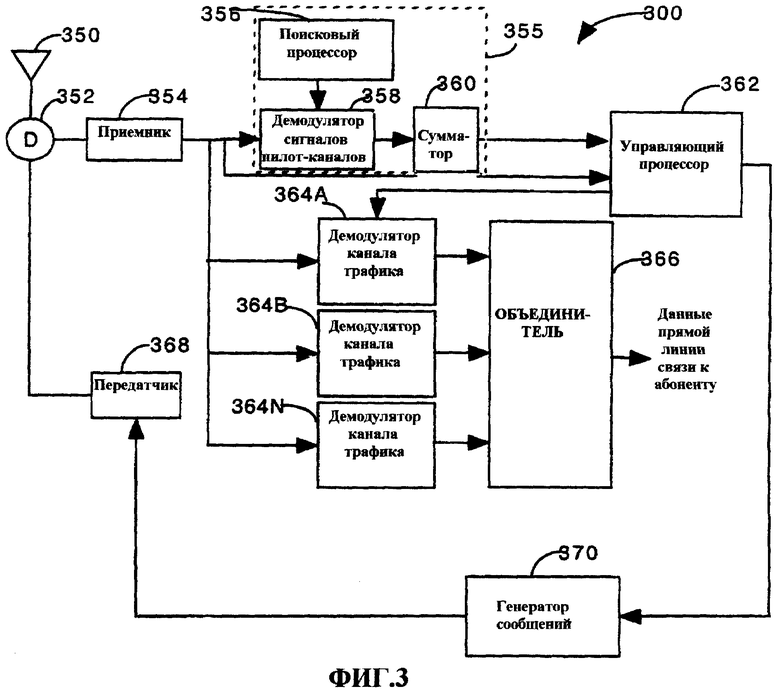
фиг.3 изображает структурную схему подвижной станции, используемой в варианте осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.1 изображен примерный вариант системы радиосвязи, в которой реализовано настоящее изобретение. В предпочтительном варианте осуществления изобретения в качестве системы связи используется система радиосвязи МДКР, хотя следует понимать, что настоящее изобретение в равной степени применимо и к другим типам систем связи. Настоящее изобретение может быть использовано в системах, применяющих другие хорошо известные схемы модуляции передачи, такие как МДВР и МДЧР, а также в других системах с расширенным спектром.
Как показано на фиг.1, система радиотелефонной связи МДКР содержит в основном множество подвижных абонентских аппаратов (станций) 10, множество базовых станций 12, контроллеры базовых станций (КБС) 14 и узел коммутации подвижной связи (УКПС) 16. УКПС 16 выполнен с возможностью сопряжения с обычной телефонной сетью общего пользования (ТСОП) 18. УКПС 16 также выполнен с возможностью сопряжения с КБС 14. КБС 14 подключены к базовым станциям 12 через ретрансляционные линии. Ретрансляционные линии могут быть выполнены с возможностью поддержки любого из нескольких известных интерфейсов, включая, например, Е1/Т1, АТМ, IP, PPP, Frame Relay, HDSL, ADSL или xDSL. Понятно, что в системе может быть более двух КБС 14. Каждая базовая станция 12 преимущественно содержит по меньшей мере один сектор (не показан), каждый сектор содержит всенаправленную антенну или антенну, ориентированную в конкретном радиальном направлении от базовой станции 12. Альтернативно, каждый сектор может содержать две антенны для разнесенного приема. Каждая базовая станция 12 может быть предпочтительно выполнена с возможностью поддержки нескольких частотных диапазонов. Пересечение сектора и частотного диапазона может называться каналом МДКР. Базовые станции 12 могут также называться приемопередающими подсистемами базовой станции (ППБС) 12. Альтернативно, понятие "базовая станция" может использоваться в данной области техники для обозначения совокупности КБС 14 и одной или нескольких ППБС 12. ППБС 12 могут также называться "сотовыми узлами" 12. Альтернативно, сотовыми узлами могут называться отдельные сектора данной ППБС 12. Подвижные абонентские аппараты 10 обычно являются сотовыми телефонами или аппаратами ПСС 10.
При обычной работе сотовой телефонной системы базовая станция 12 принимает наборы сигналов обратной линии связи от групп подвижных станций 10. Подвижные станции 10 осуществляют телефонные вызовы или другие виды связи. Каждый сигнал обратной линии связи, принятый данной базовой станцией 12, обрабатывается в ней. Полученные в результате этого данные передаются в КБС 14. КБС 14 обеспечивают выделение ресурса для вызова и функции управления подвижностью, включая организацию мягких переключении каналов связи между базовыми станциями 12. КБС 14 также маршрутизируют принятые данные в УКПС 16, который обеспечивает дополнительные услуги маршрутизации для сопряжения с ТСОП 18. Аналогичным образом ТСОП 18 сопряжена с УКПС, а УКПС 16 сопряжен с КБС 14, которые, в свою очередь, предписывают базовым станциям 12 передавать наборы сигналов по прямой линии связи в сторону групп подвижных станций 10.
Если подвижная станция переходит из зоны обслуживания первой базовой станции в системе с одной несущей в зону обслуживания второй базовой станции в системе с одной несущей, то применяются правила IS-95. Если же подвижная станция переходит из зоны обслуживания одной системы с несколькими несущими в зону обслуживания другой системы с несколькими несущими, то можно использовать различные варианты настоящего изобретения для автономной передачи СИУПК с подвижной станции.
На фиг.2 проиллюстрирована последовательность операций варианта осуществления изобретения, в котором подвижная станция в системе с несколькими несущими автономно формирует СИСУК. На этапе 200 подвижная станция входит в зону обслуживания нескольких соседствующих базовых станций. Для ясности здесь будут обсуждаться действия только одной базовой станции, хотя понятно, что все соседние базовые станции действуют аналогично базовой станции, произвольно выбранной для обсуждения. На этапе 210 подвижная станция непрерывно осуществляет поиск и прием сигналов пилот-каналов на нескольких несущих. На этапе 220 подвижная станция определяет уровни сигналов пилот-каналов согласно описанным определениям уровня сигнала пилот-канала. На этапе 230 базовая станция передает подвижной станции набор правил, содержащий условия, которыми должна руководствоваться данная подвижная станция при формировании автономных СИУПК. Следует отметить, что этап 230 осуществляется базовой станцией многократно в течение всего описанного здесь процесса, следовательно, этап 230 может выполняться в данном варианте изобретения в любой момент времени. На этапе 240 подвижная станция сравнивает уровень сигналов пилот-каналов с условиями, установленными в наборе правил, переданных на этапе 230. На этапе 250 подвижная станция формирует СИУПК, если сравнение на этапе 230 удовлетворяет по меньшей мере одному из условий для формирования СИУПК. На этапе 260 подвижная станция возобновляет обнаружение сигналов пилот-каналов на нескольких несущих и повторяет описанный способ.
В одном варианте осуществления изобретения уровень сигнала пилот-канала можно определить с учетом отношения энергии пилот-канала на один элемент сигнала (Ec) к общей принятой спектральной плотности шума и сигналов (Io), так что подвижная станция все же сможет использовать правила стандарта IS-95. Уровень сигнала пилот-канала для системы с несколькими несущими 3Х определяется следующим образом:
(1) PS1=10×log(Ec/Io основного пилот-канала),
где основной пилот-канал (обычно тот, который имеет самую высокую мощность передачи) указывается базовой станцией.
(2) PS2=10×log{[(Ec/Io пилот-канала)1/Δ1+(Ec/Io пилот-канала)2/Δ2+(Ec/Io пилот-канала)3/Δ3]/3},
где (Ec/Io пилот-канала)i - Ec/Io пилот-канала, измеренное на i-той несущей частоте, а Δi - отношение мощности передачи сигнала пилот-канала i к мощности передачи основного пилот-канала при i=1, 2 и 3.
(3) PS3=10×log{max[(Ec/Io пилот-канала)1, (Ec/Io пилот-канала)2, (Ec/Io пилот-канала)3]}.
(4) PS4=10×log{max[(Ec/Io пилот-канала)1/Δ1, (Ec/Io пилот-канала)2/Δ2, (Ec/Io пилот-канала)3/Δ3]}.
Несмотря на то, что в приведенных выше определениях указаны уровни сигналов пилот-каналов в системе с несколькими несущими 3Х, данный вариант изобретения можно использовать в системах с большим или меньшим числом несущих путем манипулирования членами Ec/Io сигналов пилот-канала, полученных с других несущих частот.
В уравнении (1) уровень сигнала пилот-канала определяется исключительно по Ec/Io основного пилот-канала. В уравнении (2) уровень сигнала пилот-канала определяется по взвешенной сумме всех трех пилот-каналов. В уравнении (3) используется максимум из всех трех пилот-каналов. В уравнении (4) используется пилот-канал, скорректированный по максимальной мощности. Предпочтительным методом является использование правил IS-95 с уровнем сигнала пилот-канала, определенным по уравнению (2). Другим предпочтительным методом является использование правила IS-95 с уровнем сигнала пилот-канала, определенным по уравнению (1), так что подвижной станции требуется всего один поиск пилот-канала на основном канале. Следующий предпочтительный подход заключается в использовании комбинации определений уровня сигнала пилот-канала согласно заданным правилам из группы правил. Например, определение уровня сигнала пилот-канала по уравнению (3) можно использовать, если система реализует правило 1 или правило 2 стандарта IS-95A, а определение уровня сигнала пилот-канала по уравнению (2) можно использовать, если система применяет вместо этого правило 3. Используя данную комбинацию определений уровня сигнала пилот-канала, подвижная станция будет сообщать повышающиеся уровни сигналов пилот-каналов набора соседей более активно, а понижающиеся уровни сигналов пилот-каналов активного набора более пассивно.
В другом варианте изобретения уровень сигнала пилот-каналов можно определять в соответствии со следующими уравнениями:
(5-1) PS51=10×log[(Ес/Io контрольного канала)1],
(5-2) PS52=10×log[(Ec/Io контрольного канала)2],
(5-1) РS53=10×log[(Ес/Io контрольного канала)3],
где индивидуально используется Ec/Io каждого пилот-канала. В еще одном варианте изобретения определения уровня сигнала пилот-канала согласно уравнениям (5-1), (5-2) и (5-3) можно использовать вместе с правилами IS-95, при этом пилот-каналы на каждой несущей подлежат сравнениям, как предписано в правилах IS-95. В другом варианте изобретения уровни PS51, PS52 и PS53 отдельных пилот-каналов используются в новой группе правил, описанных ниже:
1. Уровни сигналов пилот-каналов набора соседей пилот-каналов или набора остальных станций удовлетворяют следующим условиям:
PS51>TADD,
PS52>TADD-[10×log(Δ2)], и
РS53>TADD [10×log(Δ3)].
2. Все уровни сигналов (PS51, PS52 и РS53) пилот-каналов набора кандидатов превосходят соответствующий уровень сигнала любого пилот-канала активного набора на величину ТCOMP×0,5 дБ, и СИУПК с этой информацией не было послано с тех пор, как было принято последнее сообщение о направлении переключения каналов связи (СНП) или расширенное сообщение о направлении переключения каналов связи (РСНП).
3. Истекло время таймера сброса переключения каналов связи пилот-канала активного набора, т.е.
PS51<TDROP,
PS52<TDROP-[10×log(Δ2)], и
PS53<TDROP-[10×log(Δ3)],
по меньшей мере за интервал времени, указанный в TDROP, и СИУПК с этой информацией не было послано с тех пор, как было принято последнее СНП или РСНП.
Когда в приведенном выше наборе правил используются уровни пилот-канала, определенные как PS51, PS52 и РS53, и удовлетворено по меньшей мере одно условие из этого набора, подвижная станция автономно передает СИУПК в обслуживающую базовую станцию.
Следует отметить, что можно модифицировать приведенные выше правила с использованием уровня сигнала пилот-каналов из уравнений (5-1), (5-2) и (5-3), не ограничивая объем изобретения. Например, правило 2 приведенного выше набора правил можно заменить следующим правилом:
Альтернатива 2. Любой из уровней сигналов пилот-канала (PS51, PS52 и РS53) пилот-каналов набора кандидатов превосходит соответствующий уровень любого пилот-канала активного набора на величину ТСОМР × 0,5 дБ, и СИУПК с этой информацией не было послано с тех пор, как было принято последнее СНП или РСНП.
Возможны также различные варианты изобретения, в которых уровни PS51, PS52 и РS53 сигнала пилот-канала комбинируются с другими определениями уровня сигнала пилот-канала, такими как PS1, PS2, PS3 и PS4. Может быть реализована комбинация этих уровней сигнала пилот-канала, в которой одно условие из набора правил использует одно определение уровня сигнала пилот-канала, а другое определение уровня сигнала пилот-канала используется в связи с другим условием.
Описанные выше варианты воплощения изобретения предназначены для реализации в подвижной станции, которая перемещается из одной системы с несколькими несущими в другую систему с несколькими несущими. Однако эти варианты можно модифицировать, чтобы позволить подвижной станции перемещаться из системы с несколькими несущими в систему с одной несущей или наоборот.
В варианте, где подвижная станция перемещается из системы с несколькими несущими в систему с одной несущей, система с одной несущей использует один из каналов системы с несколькими несущими. В противном случае возникает ситуация жесткого переключения каналов связи. Под жестким переключением каналов связи подразумевается случай, когда подвижная станция осуществляет переход между непересекающимися группами базовых станций, диапазонами разного класса, различными диапазонами частоты или различными временными кадрами. Процедура поиска жесткого переключения каналов связи не будет обсуждаться здесь более подробно. В том случае, когда две базовые станции не находятся одновременно в активном наборе, активный набор с пилот-каналами на нескольких несущих заменяется новым активным набором с пилот-каналом на одной несущей. Следует отметить, что можно теоретически выполнить мягкое переключение каналов связи между базовой станцией 3Х/1Х (т.е. базовой станцией, использующей три несущих на прямой линии связи и одну несущую на обратной линии связи) и базовой станцией 1X/1X (т.е. базовой станцией, использующей одну несущую на прямой линии связи и одну несущую на обратной линии связи), если используется одинаковая скорость кодирования на прямой линии связи, и одинаковые РЧ канал и структура радиосигналов на обратной линии связи.
Одним из предпочтительных вариантов такого вида переключения каналов связи является использование сигнала пилот-канала системы с несколькими несущими, который соответствует сигналу пилот-канала, используемого системой с одной несущей. Если данный канал не является основным каналом в системе с несколькими несущими, то пилот-канал, связанный с данным каналом, имеет уровень мощности передачи с уменьшением масштаба на коэффициент Δ. Поэтому необходимо исключить из рассмотрения коэффициент Δ, прежде чем выполнять какое-либо сравнение для ТСОМР или ТDROP.
В другом варианте используется уравнение (2) для определения взвешенной суммы всех пилот-каналов в системе с несколькими несущими и эта взвешенная сумма используется в правилах согласно IS-95.
Альтернативно, система может избежать переключения каналов связи между несколькими базовыми станциями путем перехода с нескольких несущих на одну несущую внутри обслуживающей базовой станции с последующим переключением каналов связи с одной несущей на другую одну несущую согласно IS-95.
Когда подвижная станция перемещается из системы с одной несущей в систему с несколькими несущими, система с одной несущей использует один из нескольких каналов в системе с несколькими несущими. В противном случае возникает ситуация жесткого переключения каналов связи и начинается процедура поиска жесткого переключения каналов связи. В случае, когда две базовые станции не находятся одновременно в активном наборе, активный набор с пилот-каналами от системы с одной несущей заменяется новым активным набором с пилот-каналами от системы с несколькими несущими. Следует отметить, что можно теоретически выполнить мягкое переключение каналов связи между базовой станцией, использующей одну несущую на прямой линии связи и одну несущую на обратной линии связи, и базовой станцией, использующей несколько несущих на прямой линии связи и одну несущую на обратной линии связи, если используется одинаковая скорость кодирования на прямой линии связи и одинаковые РЧ канал и структура радиосигналов на обратной линии связи.
Один предпочтительный вариант такого типа переключения каналов связи заключается в применении правил IS-95 с использованием пилот-канала в системе с одной несущей. Если данный канал не является основным каналом в системе с несколькими несущими, то пилот-канал, связанный с этим каналом, имеет уровень мощности передачи с уменьшением масштаба на коэффициент Δ. Следовательно, необходимо исключить из рассмотрения коэффициент Δ, прежде чем выполнять какое-либо сравнение для ТСОМР или ТDROP.
Как отмечалось выше, еще один вариант заключается в использовании уравнения (1) или уравнения (2) для вычисления уровня сигнала пилот-каналов в системе с несколькими несущими и использовании этого результата согласно правилам IS-95.
Альтернативно, система может избежать ситуации перехода от системы с одной несущей к системе с несколькими несущими посредством перехода с одной несущей на несколько несущих внутри обслуживающей базовой станции с последующим выполнением переключения каналов связи с нескольких несущих на несколько несущих, например с одной системы 3Х на другую систему 3Х.
После того как подвижная станция определила, что следует послать автономное СИУПК базовой станции в системе радиосвязи, следует выполнить определение относительно содержания этого СИУПК. В некоторых вариантах изобретения является предпочтительным передавать уровень PS2 сигнала пилот-канала для каждого пилот-канала, упомянутого в СИУПК. Соответственно, будет также предпочтительно передавать уровни PS1, PS3, PS4 сигналов пилот-канала и/или группу, содержащую PS51, РS52 и РS53 для каждого пилот-канала, упомянутого в СИУПК. Следовательно, подвижная станция сможет сформировать СИУПК, несущее информацию об уровне сигнала пилот-канала, полученную из определений уровня сигнала пилот-канала, которые не используются в сравнении уровней сигнала пилот-канала с пороговыми уровнями. Если сообщаются PS51, PS52 и РS53, то требуется в три раза больше места для поля уровня пилот-канала в СИУПК.
Другим важным полем в сообщении СИУПК является поле ПШ (псевдошумовой) фазы пилот-канала. ПШ фаза контрольного канала применяется для определения ПШ сдвига, который используется для идентификации пилот-канала и получения оценки задержки на пути распространения сигнала между подвижной станцией и целевой базовой станцией. Одним из подходов является сообщение фазы наиболее раннего пришедшего многолучевого сигнала пилот-канала, сообщенного в СИУПК от всех трех несущих. Второй подход заключается в сообщении фазы наиболее раннего пришедшего многолучевого сигнала основного пилот-канала. Третий подход состоит в сообщении фазы наиболее раннего пришедшего многолучевого сигнала самого сильного принятого пилот-канала (с самым высоким Ec/Io). Четвертый подход заключается в сообщении фазы наиболее раннего пришедшего многолучевого сигнала пилот-канала на каждой несущей частоте. В четвертом подходе потребуется несколько полей фазы ПШ пилот-канала для каждого сообщаемого ПШ пилот-канала.
На фиг.3 изображена подвижная станция 300, используемая в способе, проиллюстрированном на фиг.2. Подвижная станция 300 измеряет непрерывно или с прерывистыми интервалами уровень сигналов пилот-каналов от соседних базовых станций. Сигналы пилот-каналов можно передавать более, чем на одной несущей частоте. Сигналы, принятые антенной 350 подвижной станции 300, подаются через дуплексер 352 в приемник 354, усиливающий, преобразующий с понижением частоты и фильтрующий принятые сигналы, которые затем подаются в демодулятор 358 пилот-канала поисковой подсистемы 355.
Кроме того, принятые сигналы подаются в демодулятор 364A-364N сигналов трафика. Эти демодуляторы или их подгруппа раздельно демодулируют сигналы, принятые подвижной станцией 300. Демодулированные сигналы от демодуляторов 364A-364N сигналов трафика подаются в объединитель 366, который объединяет демодулированные данные, обеспечивая, в свою очередь, уточненную оценку переданных данных.
Подвижная станция 300 измеряет уровень сигнала пилот-каналов. Управляющий процессор 362 обеспечивает параметры вхождения в синхронизм, заданные базовой станцией для поискового процессора 356. В частности, управляющий процессор 363 обеспечивает параметры вхождения в синхронизм для выполнения способа, описанного со ссылкой на фиг.2. Управляющий процессор 362 сохраняет в памяти 372 параметры сигнала контрольного канала, включающие в данной примерной системе МДКР значения уровня сигнала пилот-канала, ПШ сдвиги и частоту. Управляющий процессор 362 затем обращается к памяти 372 для планирования поиска пилот-канала, выполняемого поисковой подсистемой 355. В качестве управляющего процессора 362 можно использовать обычный микропроцессор известного типа. В данном примерном варианте системы связи МДКР управляющий процессор 362 подает ПШ сдвиг в поисковый процессор 356 в соответствии с сигналом следующего пилот-канала, поиск которого должен быть осуществлен. Поисковый процессор 356 формирует ПШ последовательность, которая используется демодулятором 358 сигнала пилот-канала для демодуляции принятого сигнала. Демодулированный сигнал пилот-канала подается в аккумулятор 360 энергии, который измеряет энергию демодулированного сигнала пилот-канала посредством аккумуляции энергии в течение заданных интервалов времени и передачи выборок такой аккумулированной энергии в управляющий процессор 362.
В данном примерном варианте осуществления изобретения управляющий процессор 363 осуществляет цифровую фильтрацию аккумулированных выборок энергии согласно описанным определениям уровня сигнала пилот-сигнала, формируя тем самым значение уровня сигнала пилот-канала. Затем управляющий процессор сравнивает уровень сигнала пилот-канала с порогами ТADD и TDROP.
Управляющий процессор 362 передает идентификаторы пилот-каналов и соответствующие им измеренные значения уровней в генератор 370 сообщений. Генератор 370 сообщений формирует сообщение измерения уровня сигнала пилот-канала с этой информацией. Сообщение измерения уровня сигнала пилот-канала подается в передатчик 368, который кодирует, модулирует, преобразует с повышением частоты и усиливает сообщение. После этого сообщение передается через дуплексер 352 и антенну 350.
Таким образом были описаны способ и устройство для формирования сообщений измерения уровня сигнала пилот-канала. Данное описание позволит любому специалисту осуществить или использовать настоящее изобретение. Для специалистов будут очевидны различные модификации описанных вариантов, а охарактеризованные здесь общие принципы можно применить для создания других вариантов, не прибегая к творческой деятельности. Следовательно, настоящее изобретение не ограничено описанными вариантами, а имеет самый широкий объем, соответствующий раскрытым принципам и новым существенным признакам.
Изобретение относится к области связи и, в частности, к формированию сообщений измерения силы контрольного канала в системе радиосвязи. Техническим результатом является создание способа определения и формирования автономного сообщения измерения уровня сигнала пилот-канала (СИУПК) подвижной станции в системе радиосвязи с несколькими несущими. Технический результат достигается тем, что подвижная станция принимает сигнал пилот-канала базовой станции одновременно на нескольких несущих частотах, подвижная станция использует новые определения уровня сигнала пилот-канала в наборе правил, передаваемых базовой станцией, и после проверки этого набора правил, предназначенного для формирования СИУПК, путем манипулирования и обработки полученного первого определения уровня сигнала пилот-канала формируют СИУПК для передачи из подвижной станции. 16 н.п. ф-лы, 3 ил.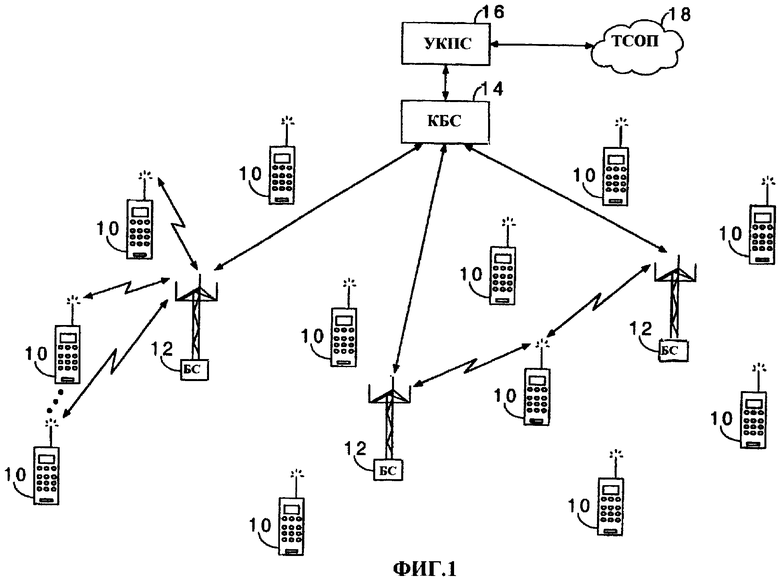
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ КАНАЛОВ СВЯЗИ ПОСРЕДСТВОМ ПРОГРАММИРУЕМОЙ ПЕРЕКАЧКИ В СОТОВОЙ СИСТЕМЕ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1998 |
|
RU2144263C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ СДВИГОВ ПСЕВДОШУМОВОГО ПИЛОТ-СИГНАЛА В МОБИЛЬНОЙ СИСТЕМЕ СВЯЗИ | 1998 |
|
RU2139642C1 |
| RU 98104915 А, 10.01.2000 | |||
| RU 96108238 A, 27.07.1998 | |||
| WO 9913675 A1, 18.03.1999 | |||
| ЕР 0948231 А1, 06.10.1999 | |||
| US 6018662 A1, 25.01.2000 | |||
| US 5267261 A1, 30.11.1993. | |||

