Изобретение относится к области робототехники, а именно к той ее части, где манипулятор вместе с носителем, например с гусеничным шасси, представляет собой единый мобильный робототехнический комплекс (МРК) с автономным питанием и системой дистанционного управления, предназначенный для работы в экстремальных ситуациях с закрытых от прямого визуального наблюдения позиций на безопасном для человека удалении от места проведения работ.
Изобретение может быть использовано:
- при ликвидации или предотвращения техногенных аварий;
- при работе с взрывоопасными предметами и веществами;
- при проведении химических, радиологических и других разведок.
Кроме того, изобретение может быть использовано как внутрипроизводственное технологическое оборудование, где по условиям техники безопасности присутствие человека недопустимо, например, при запредельной загазованности, радиации, во враждебной для человека микробиологической среде и других подобных условиях.
Известна конструкция мобильного робототехнического комплекса МРК-25 - разработка НИИСМ и СКТБ МГТУ им. Баумана, 1995 г. Источник информации по МРК-25:
- конструкторско-технологическая документация НИИСМ и СКТБ МГТУ им. Баумана, разработка 1995 г. Кроме этого данная разработка известна из следующих публикаций:
- журнал “Специальная техника” №1-4, 2000 г. Цикл статей:
Технология применения мобильных дистанционно управляемых комплексов”;
- журнал “Гражданская защита” №4, апрель 1998 г., стр. 9-12, статья - “Интуиция - опыт - расчет”.
Также известна конструкция мобильного робота для обезвреживания взрывчатых веществ BRAT фирмы КУРТ МИТТЕРФЕЛЬНЕР (KM) - ГЕРМАНИЯ. Источники информации:
Проспект фирмы КУРТ МИТТЕРФЕЛЬНЕР (КМ), где подробно изложены технические данные самоходного робота BRAT (копия проспекта прилагается). Более подробно, с учетом всех выпускаемых КМ модификаций BRAT можно ознакомиться в Интернете по WWW. Ken tree. Con/ BRAT.htm.
Оба мобильных робота отличаются по своим массогабаритным характеристикам - BRAT относится к категории малых машин, а МРК-25 - к средней весовой категории до 250 кг.
Ходовая часть МРК-25 выполнена с единым гусеничным обводом каждого борта и с изменяемой геометрией гусеничных обводов, a BRAT - с дополнительными передними гусеничными тележками.
Общими для обоих МРК являются конструктивные решения манипуляторов, которые заключаются в том, что перемещения плеча и предплечья в каждом из них осуществляются с помощью рычажных систем, которые резко снижают грузоподъемность манипуляторов и величины зоны обслуживания, и собственный вес манипуляторов многократно превышает их грузоподъемность.
Кроме того, известна конструкция МРК по патенту US Patent №4932831 Jun. 12.1990 г., который является прототипом заявляемому изобретению. В манипуляторе данного МРК перемещения плеча, предплечья и ротация схвата осуществляются самостоятельными вращательными приводами, которые непосредственно встроены в местах сочленения плеча, предплечья и схвата. Все приводы расположены на “руке” манипулятора и значительно с одной стороны утяжеляют его, а с другой - создают дополнительные нагрузки на плечо, так как механизм привода предплечья вместе с электродвигателем и редуктором находится в сочленении плеча и предплечья и изгибающий момент, возникающий от воздействия груза на схвате, полностью передается на плечо. Такая компоновка резко увеличивает требования к прочности элементов “руки” и к увеличению его веса и, как следствие, уменьшению грузоподъемности манипулятора и увеличению соотношения между собственным весом манипулятора и его грузоподъемностью.
Сущностью изобретения является совокупность признаков, позволяющих в дистанционно управляемом режиме работы МРК, антропоморфному манипулятору МРК обеспечивать выполнение операций, связанных с перемещением предметов на максимальном вылете “руки”, когда плечо, предплечье и кисть находятся на одной линии параллельно опорной поверхности шасси МРК, вес которых равен или больше собственного веса манипулятора.
Для решения этой задачи конструктивно компоновочное решение манипулятора, установленного на корпусе самоходного шасси, выполнено так, что наиболее тяжелые элементы конструкции предельно смещены к опорно-поворотной зоне манипулятора, наиболее нагруженные элементы имеют компенсаторы, снижающие напряжения изгиба, а необходимый момент для перемещения предплечья создается не на выходном валу привода, а в специальном промежуточном элементе в головной части плеча - в активном шарнире дифференциального типа.
Для этого силовое плечо в антропоморфном манипуляторе выполнено в виде жесткой пространственной рамы, состоящей из продольных щек и поперечных стяжек, и в головной части содержит активный шарнир дифференциального типа, а также разгрузочные пружины, соединяющие головную часть плеча с опорно-поворотной платформой манипулятора, при этом активный шарнир включает в себя неподвижное водило с сателлитами, ведущий вал-шестерню, консольный конец которого содержит цепную звездочку привода предплечья, подвижную корону с рычагом привода предплечья и подвижным блоком цепных звездочек привода кисти и при этом водило неподвижно закреплено в продольных щеках пространственной рамы силового плеча и является основным элементом активного шарнира. Внутренняя полость водила содержит опоры для ведущего вала-шестерни, а наружные поверхности водила имеют цапфы для подвижной короны и для блока цепных звездочек привода кисти. При этом нижняя часть силового плеча манипулятора с одной стороны шарнирно с возможностью покачивания в вертикальной плоскости соединена с платформой опорно-поворотного устройства манипулятора посредством цилиндрических поверхностей корпусов механизмов приводов предплечья и кисти, ведущие звездочки которых посредством приводных цепей кинематически соединены с активным шарниром и через него с предплечьем и кистью, а с другой стороны нижняя часть силового плеча посредством привода перемещения плеча в вертикальной плоскости также шарнирно соединена с платформой опорно-поворотного устройства манипулятора и при этом шток привода качания плеча шарнирно соединен с поперечной стяжкой плеча через промежуточный двуплечий рычаг, а сам корпус привода шарнирно с возможностью покачивания в плоскости качания плеча соединен с платформой опорно-поворотного устройства манипулятора. Кроме того, в активном шарнире манипулятора каждая ось неподвижного водила содержит блок сателлитов, состоящий каждый, как минимум, из двух шестерен, которые с возможностью вращения независимо друг от друга по углу поворота установлены на осях неподвижного водила, а приводы предплечья и кисти установлены на платформе опорно-поворотного устройства неподвижно и соосно между собой и их общая ось совмещена с осью качания плеча манипулятора, а в них ведущие цепные звездочки являются одновременно корпусами водил планетарных редукторов, а сами цилиндрические корпуса приводов имеют поперечные пазы в плоскостях работы ведущих звездочек. Кроме того, в кисти манипулятора схват имеет привод перемещения губок, привод вращения схвата относительно оси симметрии губок и видеокамеру слежения за работой губок, для чего узел стыковки кисти со охватом имеет электроконтактный разъем вращающегося типа, а губки схвата в поперечном сечении выполнены П-образной формы и имеют по всей длине неметаллические вкладыши, например из резины, толщина которых превышает высоту выступающих частей губок схвата, которые, губки, на внешних скосах имеют фиксаторы крепления сменного инструмента, например, гидроразрушителя.
Конструкция МРК по предлагаемому изобретению поясняется чертежами, где на фиг.1 показан мобильный робототехнический комплекс с манипулятором в транспортном положении (в сложенном состоянии).
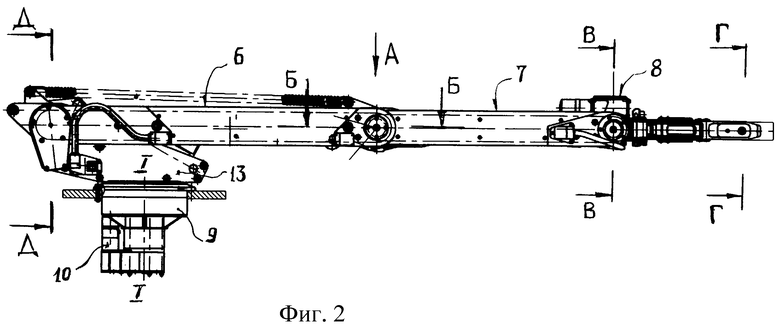
На фиг.2 и фиг.3 - манипулятор в развернутом положении (шасси условно не показано), т.е. в рабочем положении при максимальном вылете “руки”, когда плечо, предплечье и кисть находятся на одной линии параллельно опорной поверхности шасси.
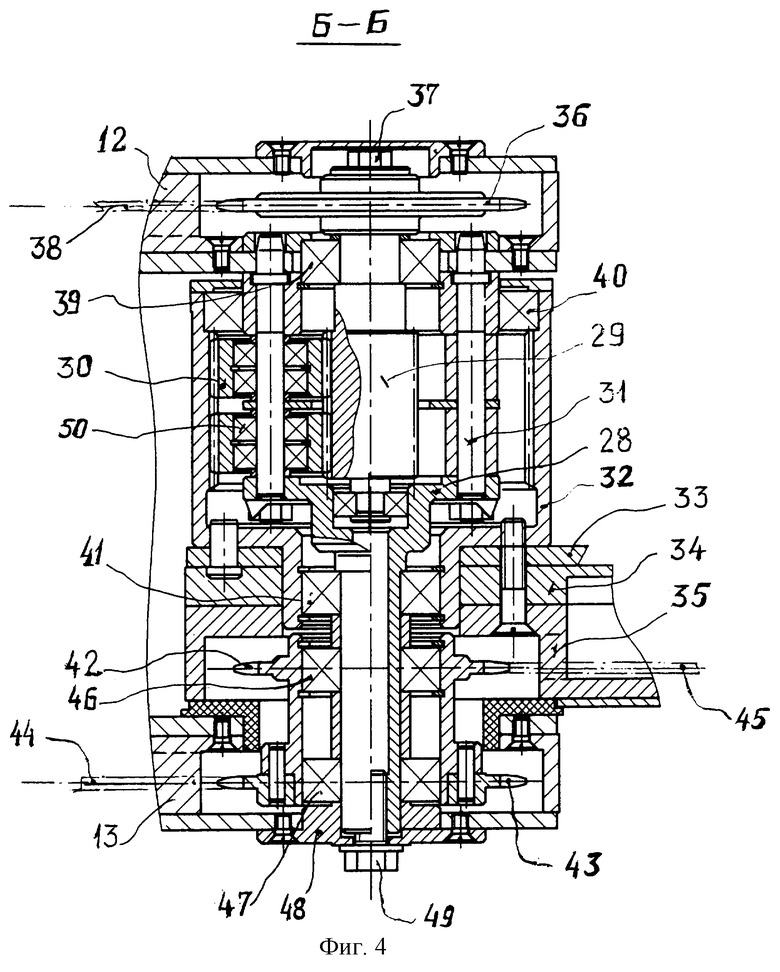
На фиг.4 - дифференциальный шарнир в разрезе (Б-Б).
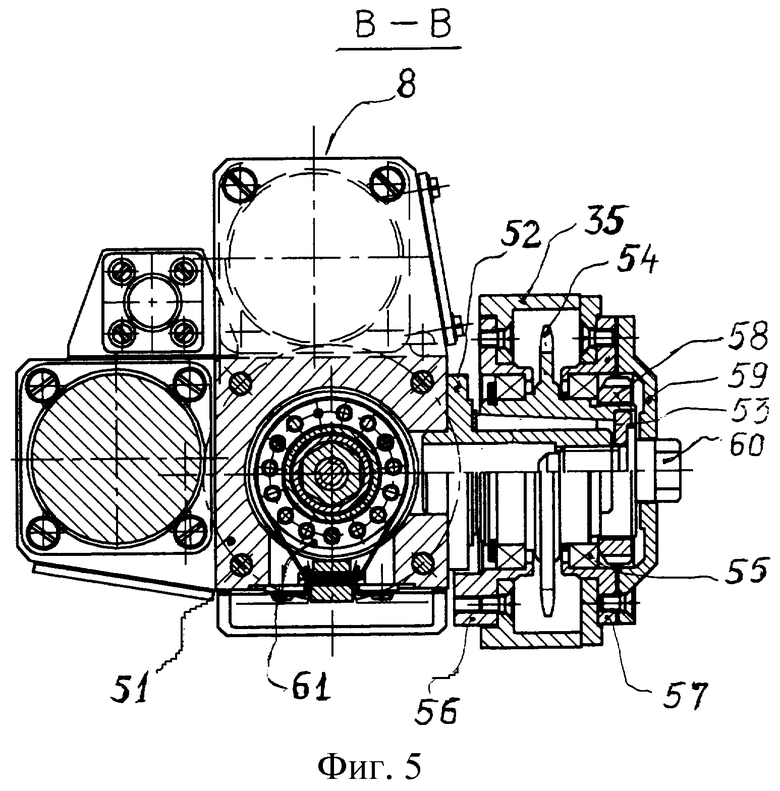
На фиг.5 - стыковка предплечья с кистью манипулятора (В-В).
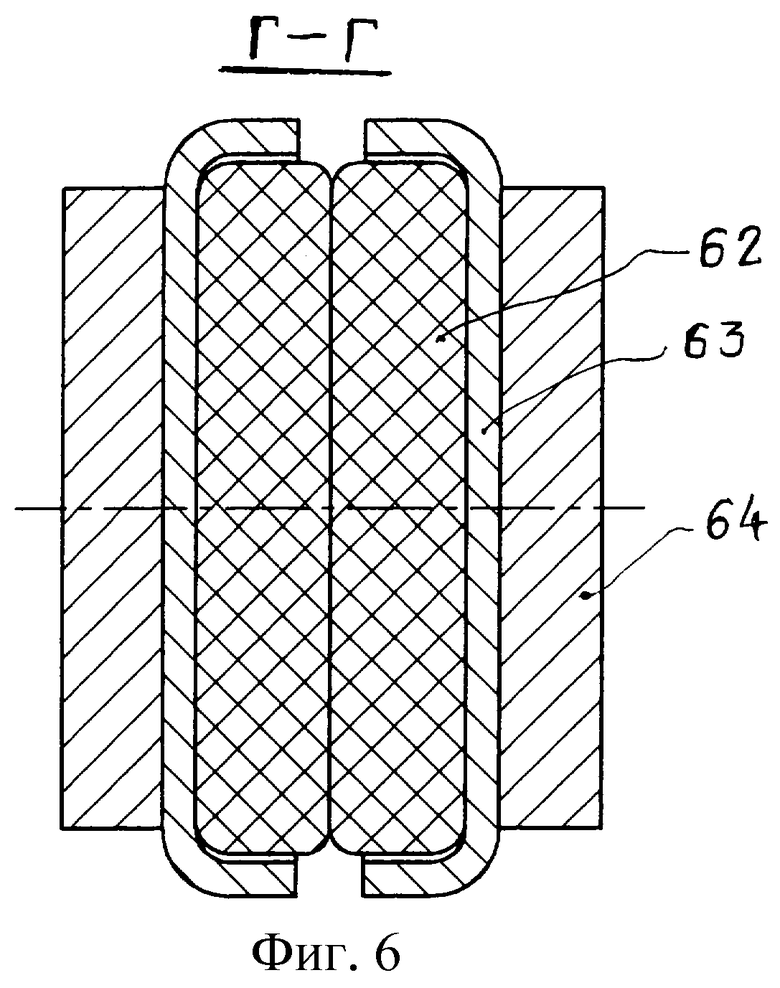
На фиг.6 - губки схвата кисти манипулятора (Г-Г).
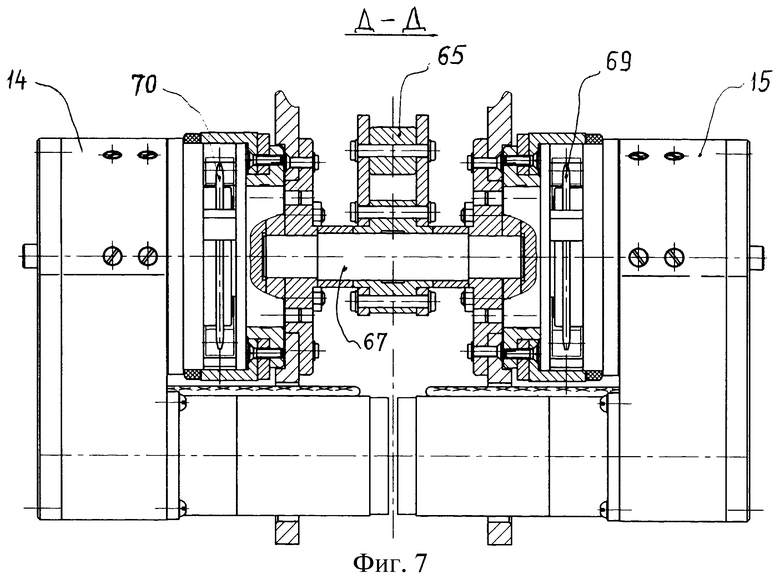
На фиг.7 - место стыковки с опорно-поворотным устройством и приводом плеча (поперечный разрез Д-Д).
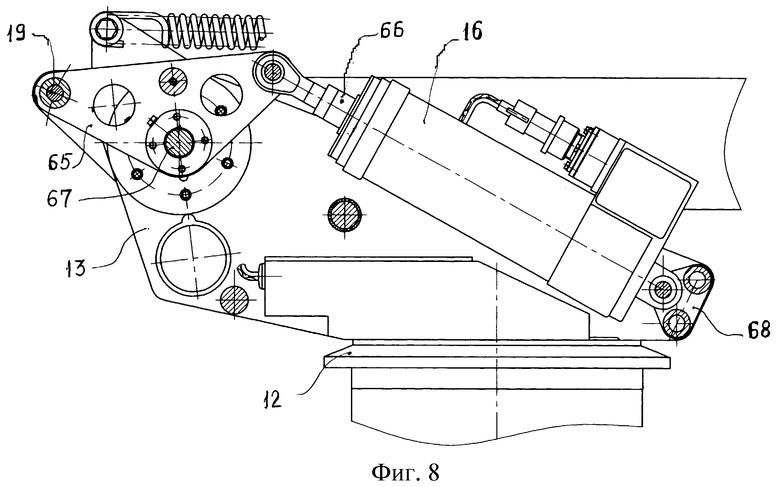
На фиг.8 - стыковка плеча с приводом поступательного движения (фронтальный вид).
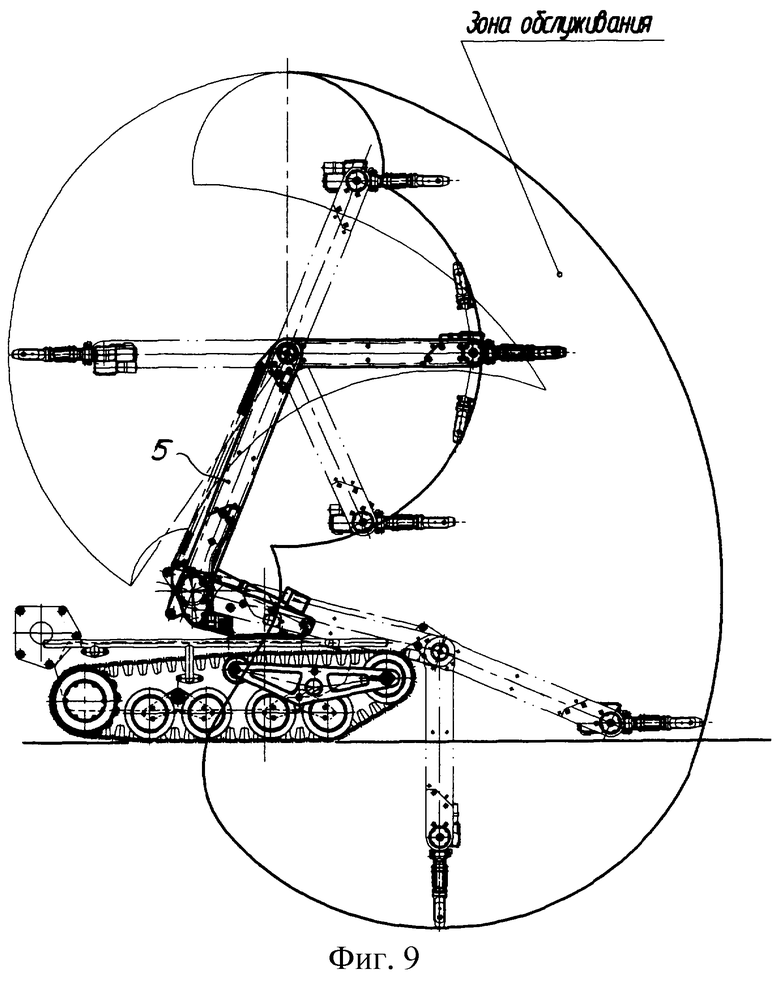
На фиг.9 - МРК (пост управления условно не показан), где манипулятор изображен в различных рабочих положениях.
Мобильный робототехнический комплекс (МРК) представляет собой единую систему узлов и агрегатов, которые функционально связаны между собой механическим, электрическим путем.
В МРК шасси, пост дистанционного управления и антропоморфный манипулятор содержат энергетические установки, например, аккумуляторные батареи, блоки электроавтоматики, телемеханики и блоки ЭВМ, на графических изображениях которые не показаны, но ссылки на которые будут даваться в процессе описания работы МРК в динамике.
МРК в целом состоит из мобильного шасси 1 (фиг.1) и дистанционного поста управления 2, которые соединены между собой командно-информационным кабелем 3 и приемной кабельной катушкой 4. На шасси 1 установлен антропоморфный манипулятор 5.
Манипулятор состоит из плеча 6 (фиг.2 и фиг.3), предплечья 7, кисти 8, опорно-поворотного устройства 9 с приводом 10, опорной плиты 11 и опорной платформы 12, на которой неподвижно установлен несущий кронштейн 13.
На несущем кронштейне 13 установлены привод предплечья 14, привод кисти 15 и привод плеча 16.
Плечо манипулятора 6 выполнено в виде жесткой пространственной рамы и состоит из продольных щек 17 и 18, соединенных между собой стяжками 19. Каждая продольная щека плеча содержит пружины 20, один конец которой закреплен к головной части каждой щеки, а другой - к несущему кронштейну 13.
Предплечье 7 выполнено в виде силовой консольной балки 21, один конец которой посредством активного дифференциального шарнира 22 соединен с головной частью плеча, а другой - шарнирно с возможностью качания в вертикальной плоскости соединен с кистью 8 манипулятора.
Кисть 8 содержит несущий корпус 23, в котором смонтированы привод 24 ротации схвата 26 (для поворота вокруг продольной оси) и привод 25 управления губками 27 схвата 26.
Активный шарнир 22 (фиг.4) содержит неподвижное водило 28, ведущий вал-шестерню 29, блоки сателлитов 30, опорные оси 31, подвижную корону 32 с неподвижно закрепленным на ней рычагом 33, свободный конец которого зафиксирован на боковине 34, неподвижно соединенной с несущей балкой 35 предплечья 7 (фиг.2). Каждый блок сателлитов состоит каждый как минимум из двух шестерен 75, установленных на подшипниках 50, которые с возможностью вращения независимо друг от друга по углу поворота установлены на осях 31 неподвижного водила 28.
Консольный конец вала-шестерни 29 содержит неподвижно закрепленную болтом 37 звездочку 36 с цепью 38, соединяющую вал-шестерню 29 с приводом предплечья 14. Кроме того, консольный конец вала-шестерни имеет опору 39 - шариковый подшипник, установленный в плече 12, где также неподвижно зафиксированы концы опорных осей 31, посредством которых водило 28 установлено неподвижно относительно продольных щек 17 и 18, а сама корона 32 установлена с возможностью вращения на подшипниках 40 и 41, внутренние кольца которых неподвижно установлены на цапфах 73 и 74 неподвижного водила, а наружные кольца подшипников зафиксированы в опорных поверхностях подвижной короны.
Противоположный конец неподвижного водила имеет блок из цепных звездочек 42 и 43, из которых цепная звездочка 42 посредством цепи 45 соединена с кистью 8, а цепная звездочка 43 посредством цепи 44 соединена с приводом 15 кисти 8. Цепные звездочки 42 и 43, выполненные как единый блок, через подшипники 46 и 47 опираются на цапфу 74 неподвижного водила 28. Подшипники 46 и 47 зафиксированы на неподвижном водиле при помощи крышки 48 и болта 49.
Кисть 8 манипулятора установлена на конце предплечья 7 с возможностью поворота (качания) в вертикальной плоскости, для чего имеет корпус 51 (фиг.5), вал 52, разрезную втулку 53, цепную звездочку 54, опорные подшипники 55, корпуса подшипников 56 и 57, гайку 58, крышку 59 и болт 60.
Цепная звездочка 54 посредством цепи 45 (фиг.4) и цепных звездочек 42 и 43 и цепи 44 соединена с приводом кисти 15. Кроме того, кисть 8 содержит электроконтактный узел 61 подвижного типа.
В кисти 8 схвата 26 губки 27 (фиг.6) выполнены комбинированными и состоят из резиновых вкладышей 62 прихватов 63 и нажимных кронштейнов 64.
Нижняя часть плеча 6 опирается на цилиндрические поверхности 71 и 72 корпусов приводов 14 и 15, которые соединены между собой осью 67, которая является опорой промежуточного рычага 65, один конец которого шарнирно связан со штоком 66 привода плеча 16, а другой со стяжкой 19 плеча 6 манипулятора.
Приводы 14 и 15 имеют цепные звездочки 69 и 70, из которых звездочка 69 посредством цепи 44 связана со звездочкой 43 и через звездочку 42 и цепь 45 со звездочкой 54 кисти 8, а звездочка 70 посредством цепи 38 и звездочки 36 через дифференциальный шарнир 22 связана с предплечьем манипулятора.
МРК работает следующим образом.
Все операции, выполняемые МРК, осуществляются по командам с дистанционного поста управления 2 по командно-информационному кабелю 3 и кабельной катушке 4, после чего код-сигнал поступает в блоки ЭВМ и блоки электроавтоматики (блоки ЭВМ и блоки электроавтоматики на чертежах не показаны) шасси 1, откуда после раскодировки поступают в блоки электроавтоматики и далее к исполнительным механизмам.
Шасси 1 МРК выполнено гусеничного типа с изменяемой геометрией гусеничного обвода с классическим приводом от задней звездочки, и все движения шасси (носителя) заключаются в изменениях скорости и направления вращения ведущих звездочек гусеничных обводов.
Работа манипулятора 5 сложна и многопланова, и количество операций и, следовательно, команд зависит от сложности поставленной задачи.
Работа манипулятора 5 начинается с вывода его из транспортного положения (фиг.1) в рабочее положение, например, для обслуживания передней полусферы МРК.
При этом происходит следующее, и весь комплекс операций осуществляется рядом последовательных команд.
По команде с поста управления “исходное положение” подается команда на поворот манипулятора на 180° и при этом включается привод 10 опорно-поворотного устройства 9 и опорная платформа 12 вместе с кронштейном 13 и установленным на нем манипулятором 5 поворачивается относительно вертикальной оси I-I на заданные 180°. Затем следует команда на подъем плеча 6 в исходное положение, например, как показано на фиг.9. По этой команде включается привод поступательного движения 16, шток 66 выдвигается из корпуса привода 16 и перемещается рычаг 65, который, поворачиваясь на оси 67, воздействует на поперечную стяжку 19, а через нее - на щеки 17 и 18 плеча 6, которое поднимается вверх. При этом нижний конец плеча поворачивается относительно общей оси 67 и корпусов приводов 14 и 15.
При вводе предплечья и кисти в рабочее положение включаются в работу приводы 14 и 15, соответственно привод предплечья и привод поворота кисти. При подъеме предплечья включается привод 14 и при этом движение через цепную звездочку 70, цепь 38 и цепную звездочку 36, вал-шестерню 29, блок сателлитов 30, подвижную корону 32 и рычаг 33 активного шарнира 22 передается непосредственно на предплечье, поворачивая его в вертикальной плоскости относительно оси активного шарнира 22.
При изменении положения кисти 8, перемещение кисти 8 в вертикальной плоскости, включается привод 15 и при этом движение через цепную звездочку 69, цепь 44, звездочку 43, звездочку 42, цепь 45, звездочку 54 и вал 52 передается на корпус 51 кисти 8.
Что касается работы схвата 26 кисти 8 и губок 27 схвата, то вращение схвата (ротация) относительно корпуса 51 кисти 8 и перемещения губок 27 осуществляется также по команде с поста управления дистанционного типа и выполняется путем включения привода 24 ротации схвата и привода 25 управления губками 27.
Описанный перевод манипулятора из транспортного положения в рабочее соответствует описанию работы манипулятора в обычном эксплутационном режиме при выполнении конкретного задания, т. к. любое изменение положения “руки” в пространстве в зоне рабочей полусферы будет сопровождаться выполнением тех же команд работой тех же узлов манипулятора и при этом в работе будут участвовать те же элементы узлов и конструкции манипулятора, что и при переводе манипулятора из транспортного положения в рабочее.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2002 |
|
RU2230683C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |

Изобретение относится к области робототехники и предназначено для работы в экстремальных ситуациях. Мобильный робототехнический комплекс (МРК) с дистанционным управлением содержит антропоморфный манипулятор, установленный на корпусе шасси, самоходное шасси, блоки электроавтоматики и телемеханики и пост дистанционного управления. Силовое плечо манипулятора выполнено в виде жесткой пространственной рамы, состоящей из продольных щек и поперечных стяжек, и в головной части содержит активный шарнир дифференциального типа, а также разгрузочные пружины, соединяющие головную часть плеча с опорно-поворотной платформой манипулятора. Изобретение позволит в дистанционно управляемом режиме работы МРК антропоморфному манипулятору на максимальном вылете “руки” обеспечить выполнение операций, связанных с перемещением предметов, вес которых равен или более собственного веса манипулятора. 8 з.п. ф-лы, 9 ил.

| US 4932831 A, 12.06.1990 | |||
| БАТАНОВ А.Ф | |||
| и др | |||
| Технология применения дистанционно управляемых мобильных комплексов | |||
| Специальная техника, №3, 2000 г | |||
| БАТАНОВ А.Ф | |||
| и др | |||
| Мобильные роботизированные взрывотехнические комплексы | |||
| Специальная техника, №1, 2000 г. |

