Изобретение относится к области робО тотехники и может быть использовано в конструкциях многоцелевых телеуправляемых и программируемых роботов различного назначения.
Цель изобретения - повышение точности позиционирования за счет ужесточения конструкции.
На фиг, 1 представлена схема антропоморфного манипулятора; на фиг. 2 - предплечье манипулятора с кистью и схватом.
Антропоморфный манипулятор (фиг, 1) состоит из трех звеньев: плеча 1, предплечья 2, кистевого звена 3 со схватом. Приводы 4-6 связывают соответственно плечо с основанием, плечо с предплечьем, предплечье с кистевым звеном, а привод 7 обеспечивает вращение кистевого звена со( схватом относительно продольной оси О-О манипулятора. Привод 4 поворачивает плечо относительно основания на углы $1 и $г , привод 5 поворачивает предплечье относительно плеча на углы QJ, и 9д , привод 6 поворачивает кистевое звено относительно предплечья на углы $s и 0, привод 7 вращает кистевое звено на угол % относительно оси О-О . Манипулятор имеет систе- му 8 управления, реализующую команды управления приводами 4-7 и схватом кистевого звена формируемыми известными программными средствами либо многостепенными рукоятками (не показаны) так, что движения звеньев манипулятора подобны движению руки человека.
Предплечье антропоморфного манипулятора имеет стойку 9, первое коромысло 10, второе коромысло 11 и кулису 12. Кулиса 12 соединена с кистью при помощи одно- подвижного приводного механизма, встроенного в кистевое звено (не показано), ось вращения Оз-Оз которого совпадает с осью кулисы. Стойка 9 шарнирно закреплена на плече 1. Ось 02-02 стойки перпендикулярна оси Oi-Oi плеча. Кулачок 13 жестко связан со стойкой. Первое коромысло 10 состоит из двух звеньев 14 и 15, связанных между собой шарниром, ось вращения которого совпадаете осью предплечья манипулятора. Входное звено 14 жестко связано со стойкой 9, а с плечом 1 - при помощи одно- подвижного привода 16, ось вращения которого совпадает с осью Оа-Оа стойки 9, Звено 15 соединено с кулиЪэй 12 посредством шарнира, ось Og-Os которого перпендикулярна оси Оз-Оз кулисы. Второе коромысло 11 включает одноподвижный
приводной механизм возвратно-поступательного перемещения (силовой цилиндр), состоящий из корпуса 17 и штока 18. Корпус 17 связан со стойкой 9 и с одноподвижным
приводом 19, ось вращения которого совпадает с осью 02-02 стойки 9, и шарниром с осью Об-Об , перпендикулярной оси 02-02 стойки 9. Шток 18 связан с цилиндрической направляющей кулисы 12 шаровой опорой 0 сферическим выступом, выполненным на штоке. Профилированная поверхность кулачка 13 контактирует с поверхностью корпуса 17, образуя кулачково-рычажный механизм второго коромысла 11, который
5 реализует заданный закон движения коромысла при его повороте. Приводы 16 и 19 одинаковые по конструкции. Например, привод 19 состоит из пары 20 и 21 однопо- лостных цилиндров, закрепленных на пло0 щадках 22 плеча 1, со штоками, к которым прикреплена цепь 23, охватывающая звездочку 24, вращающуюся относительно оси 62-02- Звездочка 24 привода 19 жестко связана со стойкой 9. Привод 16 отличается
5 тем, что его звездочка жестко связана с первым коромыслом 10.
Манипулятор работает следующим образом,
0 Система 8 управления формирует сигналы управления приводами 4-7 плеча, предплечья и кистевого звена со схватом манипулятора. При этом реализуется определенная программа движений звеньев.
5 При подаче сигналов на сервоприводы привода 4 осуществляются повороты плеча 1 на углы #1 и &i . При подаче сигналов на привод 5 осуществляются повороты предплечья 2 на углы $з и 04. В частности, поворот
0 предплечья вокруг оси 02-02 осуществляется при одновременной подаче сигналов управления на приводы 16и 19. В зависимости от выбранного направления поворота предплечья рабочее тело подается либо в штоко5 вые полости цилиндров 20, а штоковые полости цилиндров 21 соединяются со сливом, либо наоборот. При этом коромысла 10 и 11 и стойка 9 с кулачком 13 поворачиваются относительно оси 02-02. Поворот кисти 3
0 на угол 65 осуществляется следующим образом: в штоковые полости цилиндров 20 и 21 привода 16 подается рабочее тело, чем фиксируется пространственное положение первого коромысла 10; в зависимости от вы5 бранного направления поворота кисти 3 рабочее тело подается в штоковую полость одного из цилиндров 20 и 21 (при этом што- ковая полость второго цилиндра соединяется со сливом) приводного механизма 19, в
результате чего осуществляется поворот второго коромысла 11 и одновременно вместе со связанной с ним кулисой 12 вокруг оси первого коромысла 10; одновременно с подачей рабочего тела в цилиндры приводов 16 и 19 осуществляется выдвижение штока 18 привода возвратно-поступательного перемещения второго коромысла 11 для компенсации его укорочения в процессе поворота относительно осей Oz-02 и 04-0/. Для компенсации изменения вращающего момента, действующего на кистевое звено, корпус 17 второго коромысла 11 обкатывается по профилированной поверхности кулачка 13. Поворот кистевого звена 3 на угол вб в зависимости от выбранного направления поворота осуществляется выдвижением или втягиванием штока 1S привода возвратно-поступательного перемещения второго коромысла 11. При этом
сферический выступ штока перемещается по цилиндрической направляющей кулисы 12.
Поворот кисти 3 на угол QI осуществляется при подаче сигналов управления на 25 привод 6, сервопривод которого встроен в кисть 3 (не показан).
0 5
0
5
Формула изобретения Антропоморфный манипулятор, содержащий плечо, первый и второй приводы, жестко смонтированные на плече, предплечье, состоящее из входного звена, шар- нирно соединенного с плечом и кинематически связанного с первым приводом, и выходного звена, шарнирно соединенного с входным, кистевое звено, шарнирно соединенное с выходным звеном предплечья, а также систему управления, отличающийся тем, что, с целью повышения точности позиционирования за счет ужесточения конструкции, он снабжен стойкой, жестко связанной с входным звеном предплечья, шарнирно установленной на плече и кинематически связанной с вторым приводом, силовым цилиндром, корпус которого шарнирно закреплен на этой стойке, а также кулачком, жестко связанным со стойкой и находящимся в контакте с корпусом указанного силового цилиндра, при этом на штоке силового цилиндра выполнен сферический выступ, имеющий возможность взаимодействия с дополнительно введенной кулисой, шарнирно связанной с кистевым звеном.д„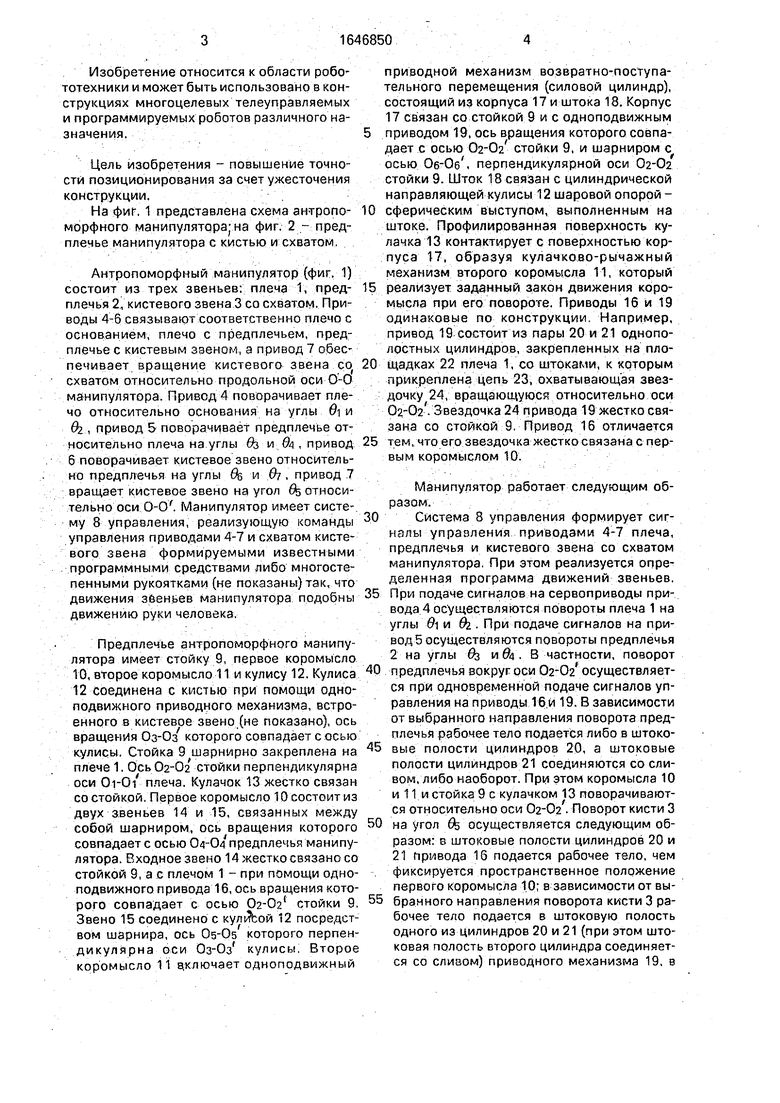
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| СПОСОБ КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2724769C1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| КОМПЛЕКС КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2725930C1 |
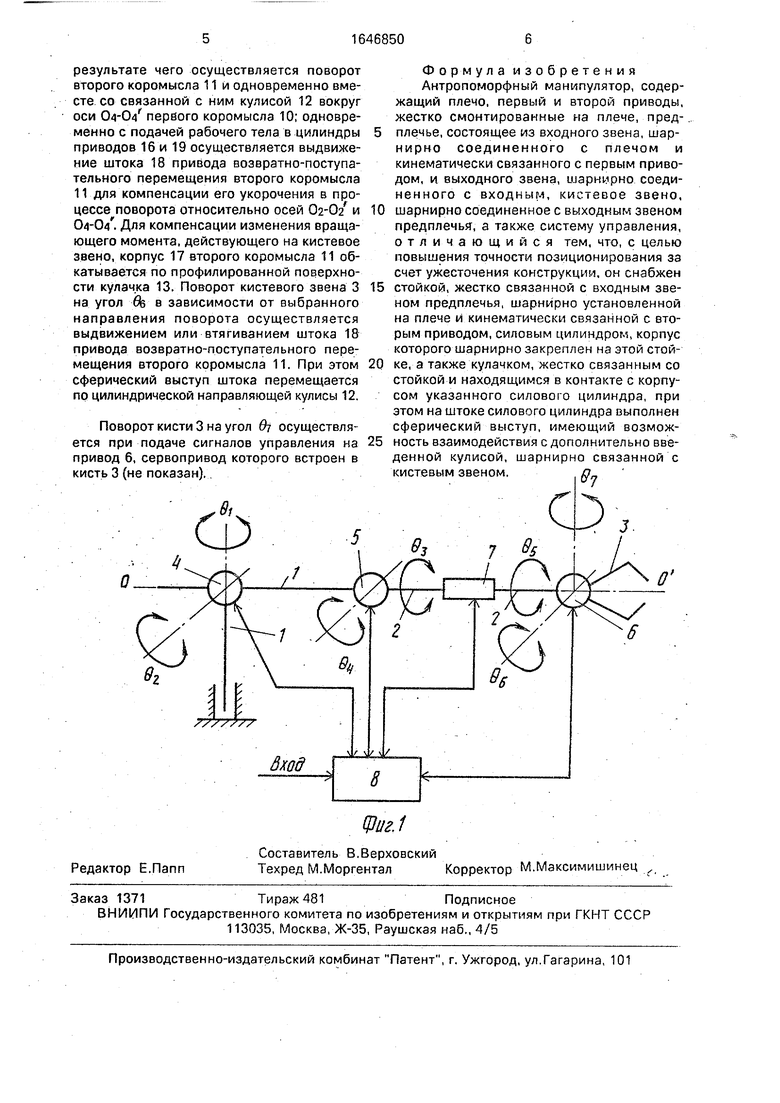
Изобретение относится к робототехнике и может быть использовано в конструкциях многоцелевых телеуправляемых и программируемых роботов различного назначения. Цель изобретения - повышение точности позиционирования за счет ужесточения конструкции. Для поворота предв , 2/ ® 20 2.2 плечья относительно плеча 1 по сигналу системы управления включаются одновременно первый 16 и второй 19 приводы, жестко установленные на плече. Для поворота кистевого звена останавливают первый привод 16, в требуемом положении и включают второй привод 19, который вращает стойку 9, шарнирно установленную На плече. При этом поворачивается корпус 17 силового цилиндра, шарнирно соединенный с этой стойкой. Шток 18 силового цилиндра взаимодействует сферическим выступом с кулисой 12, которая поворачивает кистевое звено. Одновременно корпус 17 силового цилиндра обкатывается по поверхности кулачка 13, жестко связанного со стойкой, что позволяет компенсировать изменение вращающего момента. Для наклона кистевого включают только силовой цилиндр, шток 18 которого, выдвигаясь из корпуса 17, поворачивает кистевое звено. 2 ил. .В7 ON N О 00 СП о фиг. 2
| Авторское свидетельство СССР №1317800,кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
