1
Изобретение относится к области обработки металлов давлением, в частности к устройствам для подачи в штамп и удаления из него штучньпс листовых заготовок.
Известно загрузочное и удешяющее устройство, содержащее опорную раму, кассетный механизм, выполненный в виде стоек, установленных по контуру заготовок, подъемный стол, магнитные или вакуумные захваты, привод подъема, перемещения и опускания захватов.;,
Недостатками известного устройства являются сложность конструкции и низкая производительность из-за необходимости применения нескольких приводов для подъема стопы, подъема и опускания захватов, перемещения захватов при цикловой их работе.
Известен робот к листовоштамповочному прессу, содержащий смонтированные на станине подъемный от плунжерного с напорным клапаном насоса стол для заготовок, кассетное устройство, представляющее собой несколько стоек, установленных по контуру стопы заготовок, и рычажный с ре1ечно-шестеренчатым приводом манипулятор, взаимосвязанный с кистью и механизмом схвата.
Такойробот недостаточно производителен и занимает значительную производственную площадь.
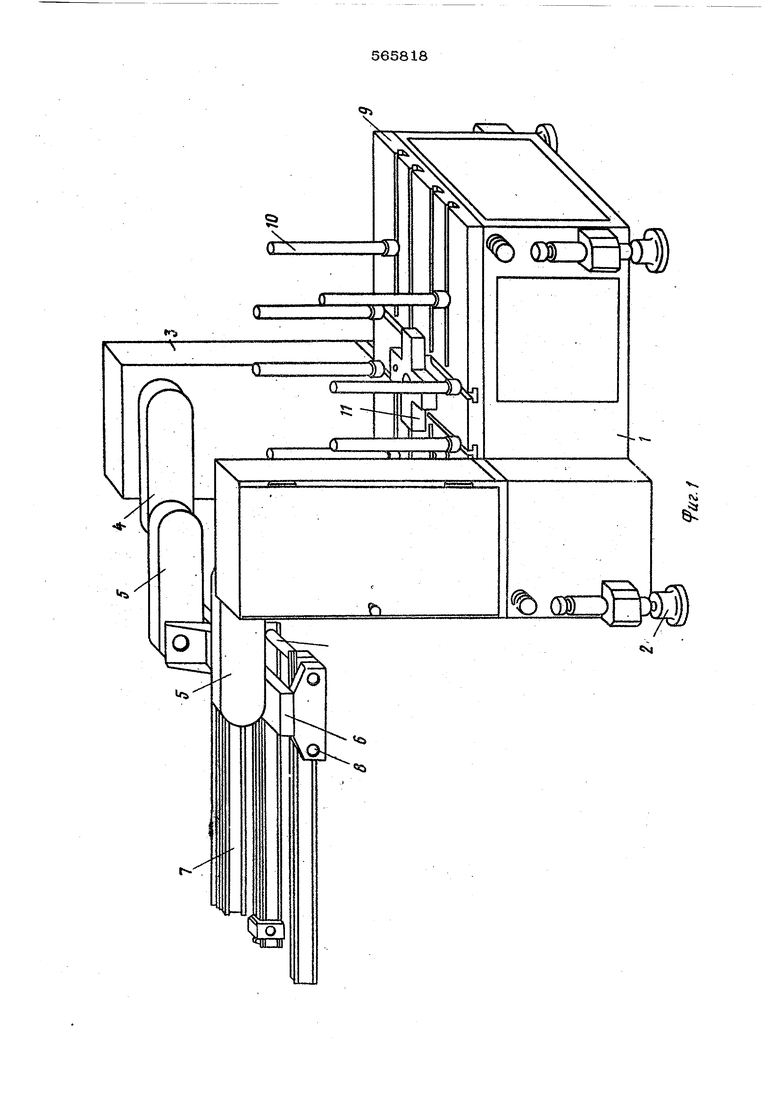
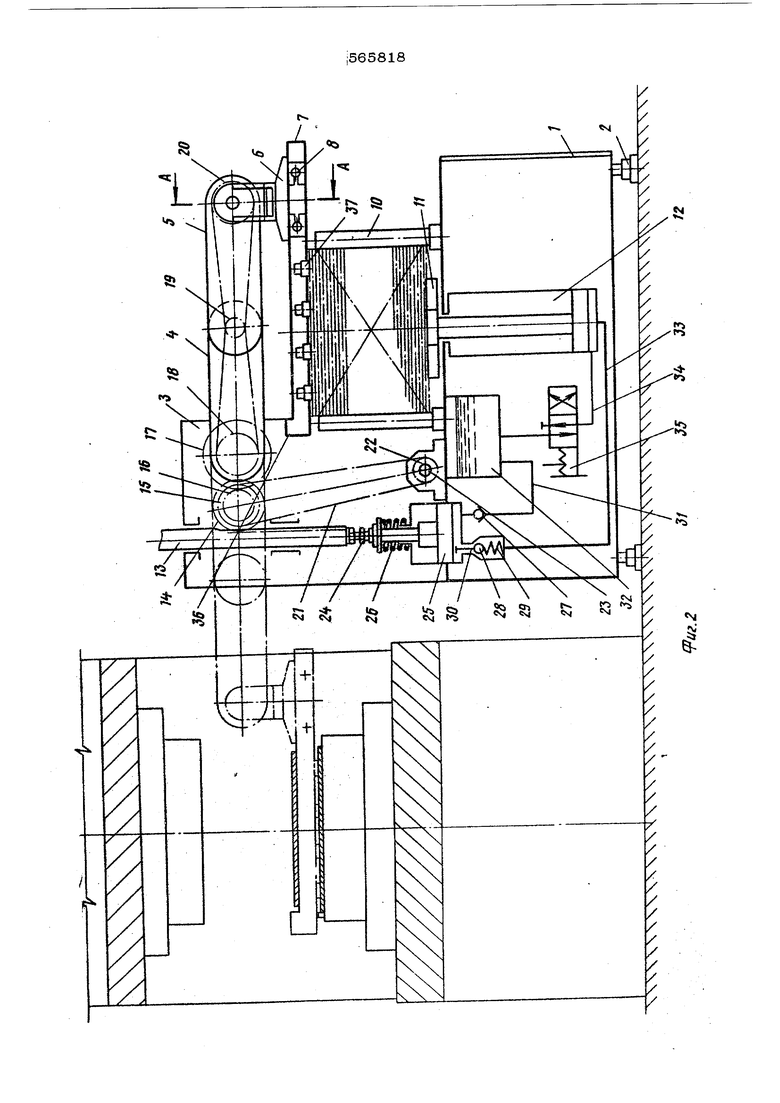
Для устранения указанных недостатков манипулятор предлагаемого робота выполнен в вида двух смежных рук, плечо каждой из которых шарнирно закреплен в диаметрально противоположно установленных стойках с возможностью качания до 1180°, а предплечья рук соединены обшей кистью с закрепленными на ней| с: шатамН|установленными с возможностью настройки по ширине, при этом привод манипулятора механически связан с плунжерным насосом подъемного стола, плунжер которого установлен с возможностью механического взаимодействия с напорным клапаном насоса посредством имеющегося упора в одном из крайних положений плунжера. Кроме того, предплечья рук манипулятора имеют длину, меньшую длины их плеч |ta мличину подъема заготовки а схваты выполнены коробчатой формы с раэмешением внутри них элементов захвата известной конструкции. На фиг. 1 изображен предлагаемый робот к листоштамповочному прессу, аксонометрия; на фиг. 2 - то же, кинематическая схема; -.а на фиг. 3 - то же, вид спра ва с частичным разрезом. Станина 1 работа установлена на четырех винтовых опорах 2. На станина жестко закреплены одна против другой две приводные стойки 3. На приводньлс стойках 3 шарнирно установлены в одной плоскости плечи 4 двух рук. Плечи 4 шариирно соединены с предплечьями 5, которые имеют длину, меньшую длины плеч. Предплечья 5 шарнирно соединены с обшей кистью 6, на которой закреплены несколько схватов 7, например три, установленных с возможностью настройки по ширине на раз мер заготовки путем перёмешения по скал кам . 8, жестко закрепленным в кисти б, и фиксации относительно кисти тангенциал ными зажимами (на чертежах не показаны На верхней плите 9 станины 1 смонтирова ны -кассетное устройство, выполненное в виде стоек 10, установленных с возможно стью перемещения по пазам плнты 9 и фи сации в них с помощью, например, болтов, и подьёмный |стол 11 с приводом от гнд, p6nmiBHZ43a 12 (фиг. 2).. В одной из стоек 3 установлена в направляющих втулках зубчатая рейка 13, которая находится в зацеплении с шестер ней 14. Последняя жестко закреплена на валу,, смонтированном на подшипниках в стойке 3, вместе со звездочкой 15 и шестерней 16. Шестерня 16 находится в зацеплении с зубчатым колесом 17, жестко закрепленным на оси качания плеча 4. Сорсно с осью качания плеча 4 установлена звездочка 18. Она с помошью.депи соединена с одной из двух звездочек 19, закрепленных вместе с предплечьем5: на оси качания пледплечья 5 относительно Ялеча 4. Число зубьев звездочки 19 в два раза меньше числа зубьев звездочки 18. Вторая-звездочка 19 с помощью цепи соединена со звездочкой 2О, установленной на оси качания кисти 6 относительно предплечья 5 и жестко соедннен.ной с кистью. Число зубьев звездочки 20 в два раза больше числа зубЬев звездочкиМ9. Кисть 6 шарнирно закреплена одновременно в обоих предплечьях 5. ;-, Вторая рука робота, имеющая аналогич:japa устройство, с помощью цепей 21, звездоек 22 и соединительного вала 23 киематически связана со звездочкой 15. Зубчатая рейка 13 имеет регулируемый пор 24, установленный с возможностью заимодействия в нижнем положении рейки с плунжером 25 импульсного насоса н под-, жатый снизу пружиной возврата 26. Под плунжером 25 импульсного насоса установлены клапан всасьюання 27 и клапан нагнетания 28, поджатый к седлу пружиной 29 и снабженный упором 30, установленным с возможностью механического взаимодействия с плунжером 25. Клапан всасывания 27 трубопроводам 31 соединен с маслобаком 32. Клапан нагнетания 28 трубопроводом 33 соединен с подпоршневой полостью гидроцилинДра 12 подъемного стола. Подпоршневая полость Гйдроцилиндра 12 трубопроводом 34 через реверсивный золотник 35 соединена с маслобаком 32. Схваты 7 на свободном конце имеют упоры 36 и выполнены коробчатой формы, а внутри них смонтированы вакуумные или магнитные захваты 37 на пружинных подвесках. Робот работает следующим образом. Предварительно стопу листовых штучных заготовок укладывают по подъемньШ стол 11 в кассетное устройство с фиксацией по ориентирующим стойкам 10. В ис- ходном положении ползун fnpecca находится .вверху, схваты 7 - в зоне межТптамповогопространства (фиг. 2). При хо де ползуна пресса вниз зубчатая рейка 13 также перемещается вниз. Привод рейки может быть индивидуальным (пневматический или гидравлический цилиндр) или от ползуна пресса (на чертежах привод не показан). Движение рейки 13 вниз через шестерни 14 и 16, зубчатое колесо 17Т звездочки 15, 22 и цепную связь 21 пре-. образуется в синхронное вращательное движение по часовой стрелке плеч 4 к рук робота. При повороте плеч 4 с помощью звездочек 18, 19 и цепной связи между ними предплечья 5 синхронно разворачиваются; против часовой стрелки относительно плеч 4 с угловой скоростью в два раза большей, чем у плеч, за счет передаточного отношения 2:1 между звездочками 18 и 19. Биссектриса угла между плечом 4 и предплечьем 5 остается при этом в вертикальной плоскости. В результате взаимодействия звездочек 19 и 20, передаточное отношение мьжду которыми равно 1:2.. кисть 6 и охват 7 в процессе перемещения неизменно остаются параллельными самим себе. Плечи 4 установлены с возможностью поворота до 180 , при этом величина го-
ризонтального перемещения схватов равняется ; удвоенной сумме длин плеча 4 и предплечья 5. Ввиду того, что предплечья рук выполнены меньшей длины, чем , схваты перемещаются по плавной кривой траект рии с подъемом в начале движения и опусканием в конце. Максимальная величина подъема равняется разности длин плеча и предплечья.
При подходе рейки 13 к крайнему дажне му положению схваты 7 находятся над стопой заготовок. От конечного выключателя (на чертежах не показан) включаются 1эахв ты 37. При этом упор 24 нажимает на шток плунжера 25. Масло из-под Грпунжера 25 через напорный клапан.28 и трубопровод 33 подается под поршень гидро- цилиндра 12. Подъемный стол 11 поднимает стопу на величину большую, чем трлшина заготовки, до соприкосновения вврх ней заготовки с захватными устройствами 37.
При обратном ходе рейки 13 от привода вверх плунжер-25 пружиной 26 возвра щается в исходное положение, при этом кла пан 28 в результате взаимодействия упора 30 с;ппунжером 25 закрыться сразу не может, чем обеспечивается опускание стопы на ;.,. некоторую величину
hj h-(5,
где tt - высота подъема стопы; - толщина заготовки.
В результате меншу верхней захваченной заготовкой и оставшейся стопой образуется необходимый зазор, обеспечива- ; ющий свободное перемещение схватов 7 с захваченной заготовкой.
После закрытий Kftianaua 28 опуска-; кие стопы прекращается, под плунжер 25 импульсного , iHacoca подается масло из маслобака 32 по трубопроводу 31 через клапан всасывания 27.
При перемещении рейки 13 |ввбрх происходит обратное движение всех элементов робота. При достижении рейкой 13 крайнего верхнат о положения схваты 7 доводят заготовку до упоров в штампе и по команде конечного выключателя (на чер- ; тежах не показан) захваты 37 отключаются. В этот момент из верхней части штампа выталкивается вырубленная во время предыдущего хода пресса деталь, которая падает на верхние плоскости схватов 7, вьтолненные в виде лыж. При повторении цикла работы робота .деталь, поддержйваемая на схватах 7 с левой стороны упорами 36, сбрасывается в тару (на чертежах ге показана).
- После снятия поспед11ей заготовки подъем нътйстол 11 поднимается в крайнее верхнее по по
жёние и по команде конечного выкпючатепя Гна чертежахне показанУпресс и робот выключают
Опускание стола 11 осуществляется переключением золотника 35, подпоршкевая полость цилиндра 12 при этом с помощью трубопровода 34 через золотник 35 соединяется с маслобаком.
Изменение программы работъ робота заключается в изменении уровня и шага подачи заготовки в пресс, подъемной силы захватнътх элементов 1схватов, а также в изменении самого характера выполнения работы: Г робот I может выполнять только укладку листовых заготовок в штамп из
кассеты; только съем отштампованных де-. ./
талей с укладкой в кассету; (укладку заготовок из кассеты в штамп и удаление из штампа в тару отштампованных детаiпей одновременно. Подаваемые в штамп писто1вые заготовки могут иметь самую разпичную конфигурацию и размеры Л внекоторых пределах, зависящих от типоразмера робота.
Фо рмула изобретения
1. Робот к лнстоштамповочному прессу, содержащий смонтированнЕве на станине подъемный от плунжерного с напорным клапаном насоса стол для заготовок, кассетное устройство представляющее собой несколько стоек, установленных по контуру стопы ч. заготовок, и рычажный с реечношестеренчатым приводом; манипулятор, взаимосвязанный с кистью и механизмом схвата, отличающийся тем, что, с целью повышения производительности робота и эффективности использования производственной площади, манипулятор выполнен в виде двух смежных рук, плечо каждой из которых шарнирно закреплено в диаметрально противоположно установленных стойках с возможностью качания до 18О , предплечья рук соединены общей кистью с закрепленными в ней схватами, установленными с возможностью настройки по ширине, а привод манипулятора механически связан с плунжерным насосом подъемного стола, плунжер которого установлен с возможностью механического взаимоаойствия с напорным клапаном на- сиса посрэдством имеющегося упора в од- ном из крайних положений плунжера.
. 2. Робот по П.1, отличающийс я тем, что предплечья рук манипуля имеют длину, меньшую длины их.,плеч на величину подъема заготовки,
3. Робот по П.1, о т л и ч а ю щ и ас я том, что схваты выполнены коробча той формы с размещением внутри нах элементов захвата известной чконструкции, на npiiMep вакуумных или магнитных. / / / / { / / Г §5 S3
иг. 3 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1977 |
|
SU677906A1 |
| Робот к листоштамповочному прессу | 1981 |
|
SU990502A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Рука манипулятора | 1982 |
|
SU1166989A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Гибкий технологический модуль | 1986 |
|
SU1586825A1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |