Изобретение относится к области робототехники, а именно к той ее части, где носитель, например гусеничное шасси, вместе с манипулятором представляет собой единый мобильный робототехнический комплекс /МРК/ с автономным питанием и системой дистанционного управления, предназначенный для работы с закрытых от прямого визуального наблюдения позиций на безопасном для человека удалении от места проведения работ.
Изобретение может быть использовано:
- при ликвидации или предотвращении техногенных аварий;
- при работе со взрывоопасными предметами и веществами;
- при проведении химических, радиологических и других разведок.
Кроме того, изобретение может быть использовано как внутрипроизводственное технологическое оборудование, где по условиям техники безопасности присутствие человека недопустимо, например при запредельной загазованности, радиации, во враждебной для человека микробиологической среде и других подобных условиях.
Известна конструкция мобильного робототехнического комплекса - разработка НИИСМ и СКТБ МГТУ им. Баумана МРК-25. В МРК-25 гусеничное шасси выполнено с передним расположением приводных мотор-звездочек и с механизмами изменения геометрии гусеничных обводов. Внутри каждого гусеничного обвода смонтированы приводы перемещения ленивцев по высоте. Каждый ленивец имеет винтовую нажимную пружину. Пружина выполняет двойную роль: с одной стороны она является непосредственно элементом, с помощью которого выполняется натяжение гусеницы, а с другой - она является компенсатором при изменении геометрии гусеничных обводов. В этом заключается основной недостаток и противоречие конструкции, так как первоначальное натяжение гусениц должно быть в 2-3 раза выше необходимого для того, чтобы скомпенсировать изменение положения ленивца при изменении геометрии гусеничных обводов. Кроме того, в зависимости от условий работы нагрузка на гусеницы постоянно меняется, а усилие, создаваемое пружиной, постоянное, поэтому при изменении направления движения шасси и при бортовых поворотах за звездочками или ленивцами образуются “петли”, приводящие к сбросу гусениц, что является основным недостатком конструкции. И еще, при верхнем крайнем положении ленивцев в МРК-25 практически полностью блокируется работа манипулятора, так как он оказывается внутри гусеничного коридора.
Также известен самоходный робот по обезвреживанию взрывчатых веществ BRAT фирмы КУРТ МИТТЕРФЕЛЬНЕР КМ - ГЕРМАНИЯ, выполненный с носителем на гусеничном ходу, который снабжен дополнительной парой гусениц, смонтированной на передней части корпуса с возможностью шарнирного поворота в вертикальной плоскости. Таким образом, изменение положения дополнительных гусениц по высоте позволяет изменять угол атаки при подходе к препятствиям. Таким образом, BRAT не имеет единого гусеничного обвода, а представляет четырехгусеничное шасси с повышенным потреблением энергии и системой привода гусениц, вызывающей знакопеременные нагрузки их ветвей. Такое конструктивное решение значительно снижает общий КПД шасси и уменьшает время непрерывной работы в экстремальных ситуациях.
Кроме того, известна конструкция МРК US Patent №5022812 oт iune, 1991, который представляет собой шестигусеничную систему ходовой части, две пары из которых являются вспомогательными. Так же как и в конструкции самоходного робота фирмы BRAT данная конструкция не имеет общего гусеничного обвода и относится условно к типу гусеничных машин с изменяемой геометрией гусеничных обводов и обладает еще более высоким энергопотреблением.
Из рассмотренных выше конструкций МРК наиболее близкой к заявляемому изобретению является разработка НИИСМ и СКТБ и МГТУ им. Баумана МРК-25, которую и целесообразно принять в качестве прототипа.
Сущностью изобретения является совокупность признаков, позволяющих в дистанционно управляемом режиме работы МРК осуществлять в гусеничном шасси одновременное /синхронное/ изменение величины клиренса и геометрии гусеничных обводов каждого борта, обеспечивая при этом неизменность длин гусеничных обводов при непрерывном взаимодействии с внутренними поверхностями гусеничных обводов опорных катков, блоков поддерживающих роликов и ленивцев, что обеспечивает повышенную профильную проходимость гусеничного шасси, а именно, преодоление уступов, лестничных маршей, уклонов и подъемов, что достигается тем, что в МРК гусеничное шасси содержит дифференциальный механизм синхронного изменения величины клиренса и геометрии гусеничных обводов, который состоит из двух бортовых синхронизаторов, которые установлены вдоль бортов корпуса гусеничного шасси внутри гусеничных обводов и которые шарнирно с возможностью покачивания /поворота/ в вертикальной плоскости соединены с корпусом гусеничного шасси, поперечных траверс с резинометаллическими шарнирами на концах, посредством которых бортовые синхронизаторы соединены между собой и центральный привод поступательного движения, подвижный шток которого через промежуточный рычаг соединен с поперечными траверсами, а сам привод шарнирно с возможностью покачивания в вертикальной плоскости соединен с корпусом гусеничного шасси, и при этом каждый бортовой синхронизатор состоит из жесткой пространственной рамы, включающей в себя параллельные щеки и соединяющие их поперечные стяжки, и установленных на ней /раме/: в головной /передней/ части-ленивца, на заднем конце пространственной рамы-блока поддерживающих роликов, а в нижней ее части неподвижно установлены несущий вал бортового синхронизатора и асимметрично относительно оси несущего вала опорная ось, где консольный конец несущего вала шарнирно соединен с корпусом гусеничного шасси, а на опорной оси - шарнирно с возможностью покачивания в вертикальной плоскости установлен кронштейн гусеничной тележки с опорными катками, и кроме того, ленивцы, блоки поддерживающих роликов и кронштейны гусеничных тележек установлены на вертикальных щеках пространственных рам бортовых синхронизаторов относительно осей несущих валов так, что при изменении гусеничных обводов путем поворота бортовых синхронизаторов в вертикальной плоскости длина гусеничных обводов остается неизменной, опорные катки гусеничных тележек, ленивцы и блоки поддерживающих роликов постоянно находятся во взаимодействии с внутренними поверхностями каждого гусеничного обвода, а величина клиренса изменяется пропорционально углу поворота бортовых синхронизаторов дифференциального механизма.
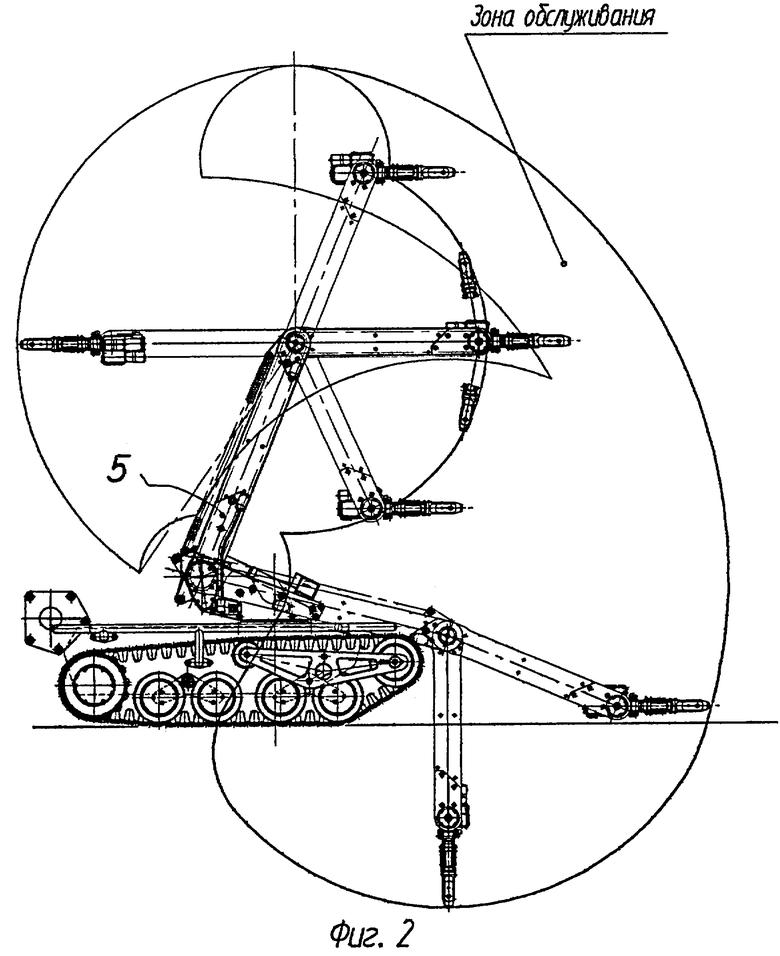
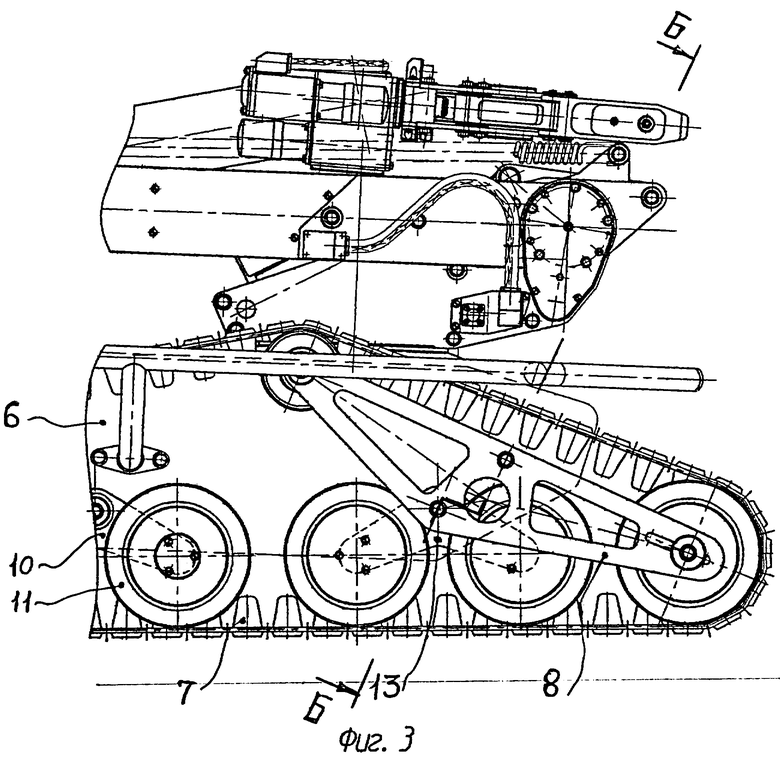
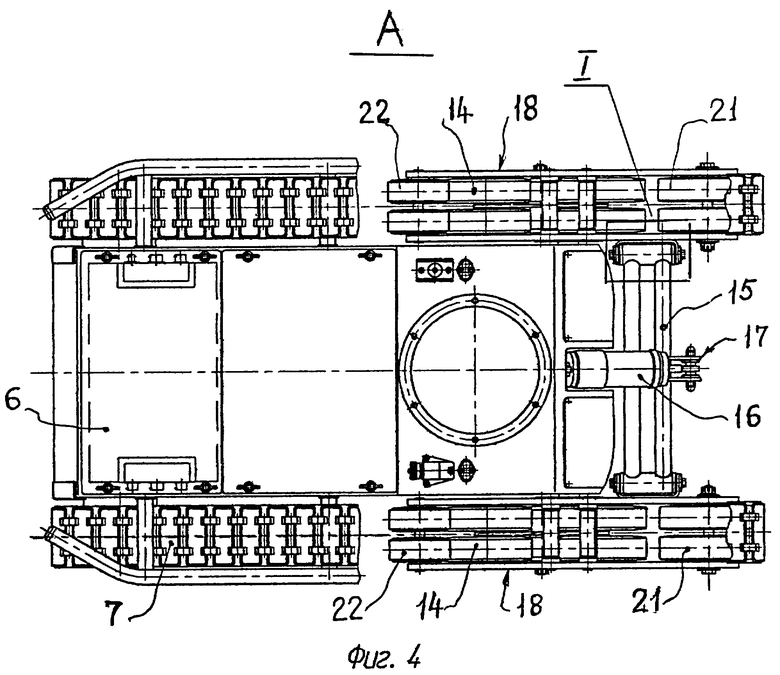
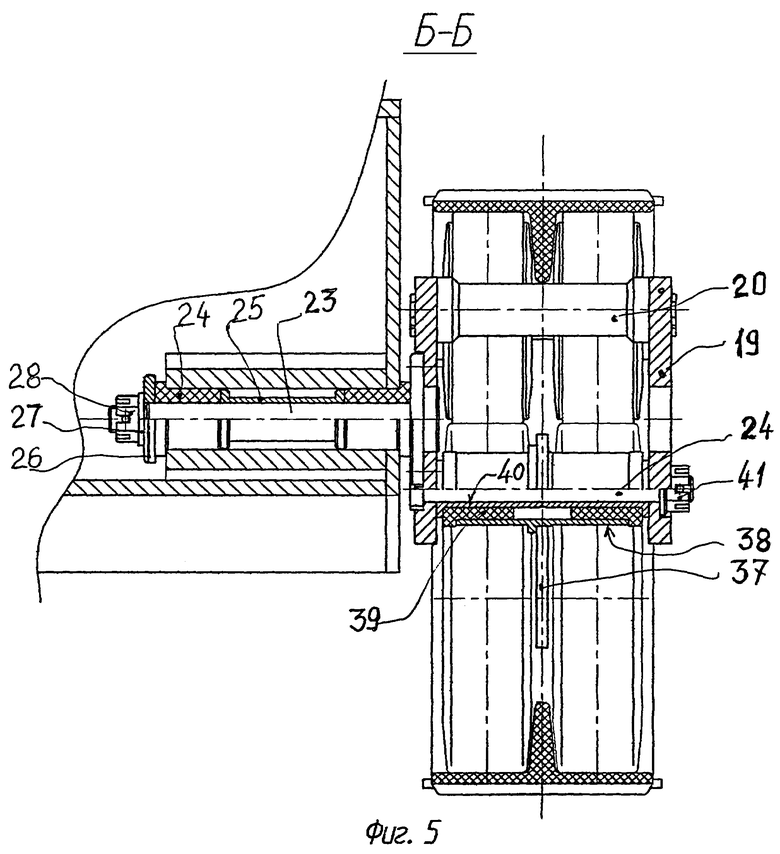
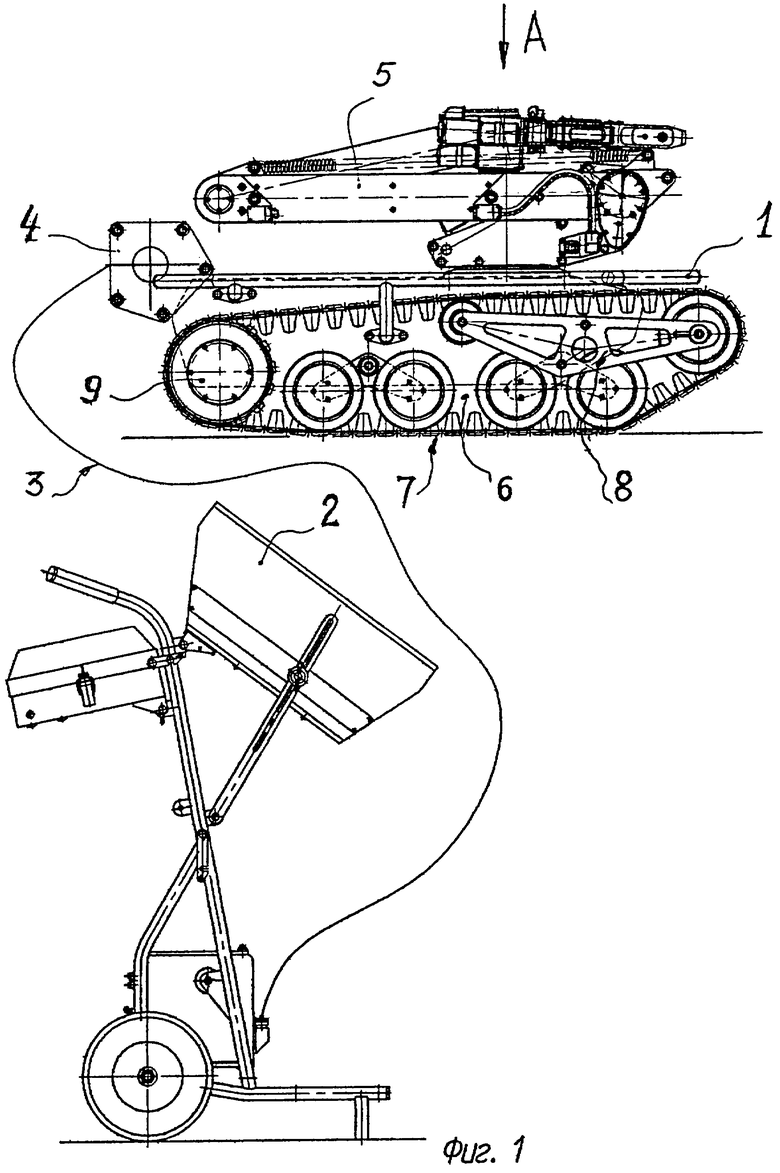
Конструкция МРК по предлагаемому изобретению поясняется чертежами, где на фиг.1 изображен мобильный робототехнический комплекс, гусеничное шасси изображено с ленивцем в верхнем крайнем положении; на фиг.2 - шасси МРК и возможные зоны обслуживания манипулятором; на фиг.3 - шасси МРК с ленивцем в нижнем крайнем положении; на фиг.4 - шасси (Вид А) с условно снятым манипулятором и кабельной катушкой; на фиг.5 - сечение Б-Б по оси несущего вала бортового синхронизатора и опорная ось качания гусеничной тележки; на фиг.6 - крепление траверсы к бортовому синхронизатору.
Мобильный робототехнический комплекс (МРК) состоит из гусеничного шасси 1 и поста дистанционного управления 2, которые соединены между собой командно-информационным кабелем 3 и кабельной катушкой 4.
На гусеничном шасси 1 установлен манипулятор 5 (на фиг.1 манипулятор изображен в транспортном положении).
И гусеничное шасси, и пост дистанционного управления содержат энергетические установки, например, аккумуляторы, блоки электроавтоматики и телемеханики и блоки ЭВМ, на графических изображениях которые не показаны, но ссылки на которые будут осуществляться в процессе описания работы МРК в динамике.
Гусеничное шасси МРК содержит общий корпус 6, на который внутри замкнутых гусеничных обводов 7 в передней части установлен дифференциальный механизм 8, а в задней части корпуса смонтированы приводные мотор-звездочка 9 и гусеничные тележки 10 с опорными катками 11. Гусеничные тележки 10 установлены на валах 12, консольные концы которых шарнирно с возможностью покачивания в вертикальной плоскости установлены в корпусе гусеничного шасси.
Передняя пара гусеничных тележек 13 смонтирована в дифференциальный механизм 8.
Дифференциальный механизм 8 состоит из бортовых синхронизаторов 14, соединяющих их поперечной траверсы 15 и привода поступательного движения 16, подвижный шток которого через промежуточный рычаг 17 шарнирно соединен с поперечной траверсой 15, а сам привод, в свою очередь, шарнирно соединен с корпусом гусеничного шасси.
Каждый бортовой синхронизатор, входящий в дифференциальный механизм, состоит из жесткой пространственной рамы 18, в которой основными несущими элементами являются плоские параллельные щеки 19, соединенные между собой стяжками 20.
В головной (передней) части каждого бортового синхронизатора установлены ленивец 21, в задней части блок поддерживающих гусеничный обвод роликов 22, в нижней части неподвижно установлен несущий вал 23 и асимметрично относительно оси несущего вала - опорная ось 24 гусеничной тележки 13.
Несущий вал 23 выполнен консольным и выступающим за пределы рамы 18, его конец шарнирно установлен в корпусе 6 при помощи втулок 24, распорной втулки 25, шайб 26 и 27 и гайки 28, которые вместе с корпусом гусеничного шасси образуют подвижное резино-металлическое соединение, обеспечивающее покачивание каждого бортового синхронизатора в вертикальной плоскости относительно оси несущего вала 23.
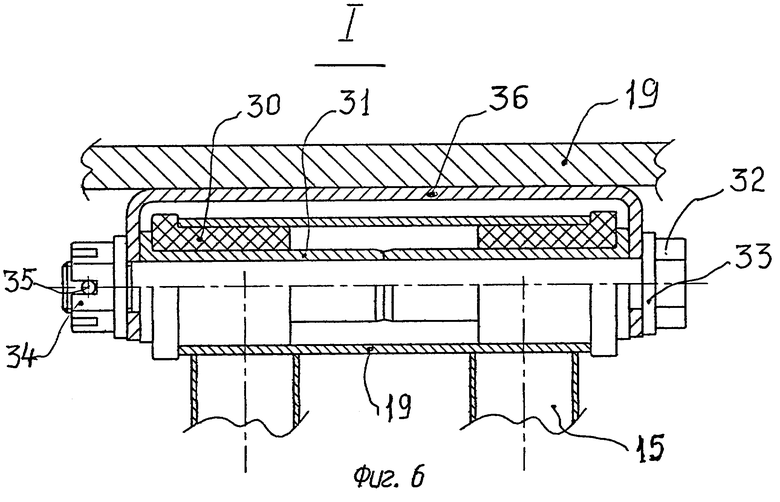
Поперечная траверса 15 выполнена в виде плоской сварной фермы из цилиндрических труб, в центре которой размещен рычаг 17 с отверстием для шарнирного крепления штока привода 16, а на концах фермы траверсы содержатся поперечные втулки 29, в которых установлены неметаллические втулки 30, втулки 31, стяжной болт 32, посредством которого, а также шайб 33, гайки 34 и шплинта 35, концы поперечной траверсы соединены с кронштейнами 36, которые неподвижно закреплены на щеках рам бортовых синхронизаторов.
Таким образом, бортовые синхронизаторы дифференциального механизма соединены между собой поперечной траверсой так, что деформация втулок 30 обеспечивает независимое друг от друга перемещение рам бортовых синхронизаторов в вертикальной плоскости в пределах величин деформации втулок 30.
Кроме того, каждая гусеничная тележка 13, входящая в состав бортовых синхронизаторов, имеет опорную ось 24 с зажимной гайкой 41, кронштейн 37 со ступицей 38, с размещенными в ней (в ступице) втулками 39 и стаканами 40.
Таким образом совокупность конструктивных особенностей дифференциального механизма обеспечивает:
- поворот бортовых синхронизаторов в вертикальной плоскости на собственных несущих валах относительно корпуса шасси;
- перемещение передних гусеничных тележек вместе с опорными катками по высоте;
- покачивание кронштейнов гусеничных тележек в вертикальной плоскости на опорных осях относительно рам бортовых синхронизаторов;
- перемещение ленивцев по высоте;
- перемещение блоков роликов, поддерживающих гусеничные обводы по высоте;
- неизменность длины гусеничных обводов при повороте бортовых синхронизаторов, за счет специального взаимного расположения на рамах бортовых синхронизаторов (на плоскости щек рам бортовых синхронизаторов) осей ленивцев, блоков поддерживающих роликов и опорных осей гусеничных тележек относительно осей несущих валов бортовых синхронизаторов;
- изменение клиренса шасси одновременно с изменением геометрии гусеничных обводов за счет перемещения передних гусеничных тележек по высоте при повороте бортовых синхронизаторов;
- пропорциональность изменения величины клиренса в зависимости от расстояния осей ленивцев относительно опорной поверхности гусеничного шасси.
Работа МРК происходит следующим образом. По команде с поста дистанционного управления 2 по командно-информационному кабелю 3 и кабельную катушку 4 код команды поступает в автономные блоки управления гусеничного шасси (блоки управления на чертежах не показаны). В зависимости от кода команды приводятся в действие соответствующие механизмы: мотор-звездочка, исполнительные механизмы манипулятора, дифференциальный механизм изменения клиренса и геометрии гусеничных обводов и другие механизмы.
При поступлении команды на изменение клиренса и геометрии гусеничных обводов происходит следующее (исходное положение ленивца - крайне нижнее, как показано на фиг.3). Включается привод поступательного движения 16 дифференциального механизма 8. Шток привода 16 начинает перемещаться, втягиваясь в привод (шток работает на растяжение) и взаимодействуя с рычагом 17 поперечной траверсы 15, через поперечные втулки 29, неметаллические втулки 30, втулки 31, стяжной болт 32 и кронштейн 36 движение передается на бортовые синхронизаторы 14, которые поворачиваются относительно оси несущего вала 23. При этом консольный конец несущего вала 23, поворачиваясь вместе с рамой 18 бортового синхронизатора 14 в корпусе 6 гусеничного шасси 2, деформирует (скручивает) втулки 24, соединяющие шарнирно несущий вал 23 с корпусом 6.
При повороте бортового синхронизатора ленивец 21, постоянно находясь в контакте с гусеничным обводом 7, перемещается вверх по радиусу, равному расстоянию от оси поворота рамы 18 бортовых синхронизаторов 14 до оси ленивцев 21 (ось несущего вала 23), а опорная ось 24 гусеничной тележки 13 по радиусу, равному величине смещения относительно несущего вала 23, опускается вниз. При этом опорные катки 11 гусеничной тележки 13, опираясь на опорную поверхность гусеничного шасси, поднимают переднюю часть корпуса 6 гусеничного шасси 2 путем поворота относительно задней гусеничной тележки 10 с опорными катками 11, увеличивая таким образом величину клиренса передней части корпуса 6 гусеничного шасси 2. Кроме того, блоки поддерживающих роликов 22 также опускаются вниз по радиусу, равному расстоянию от собственной оси до оси опорного вала 23.
При выполнении обратной команды - опускание ленивцев 21 вниз, все операции повторяются в обратном порядке.
Мобильные робототехнические комплексы, в которых в качестве движителя используются гусеничные шасси, обладают всеми достоинствами и недостатками, которые присущи любым машинам на гусеничном ходу.
Вопросы проходимости и устойчивости являются первостепенными. Поэтому предложенная конструкция МРК с гусеничным шасси, имеющая в своем составе манипулятор, который в процессе работы создает дополнительные трудности, т.к. постоянно изменяет момент опрокидывания, смещает центр тяжести, в зависимости от поднимаемого груза изменяет удельное давление на опорную поверхность, особенно актуально для работы в экстремальных ситуациях. То есть возможность изменения углов атаки переднего гусеничного свеса, изменение клиренса, изменение площади опорной поверхности, перемещение ребра опрокидывания при работе в экстремальных ситуациях значительно увеличивает надежность всей системы, живучесть и вероятность выполнения поставленной задачи, а изменение геометрии гусеничных обводов при едином замкнутом контуре в отличие от многогусеничных систем обладает более высоким КПД и, следовательно, более высоким запасом хода - временным рабочим запасом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Погрузочная машина непрерывного действия | 1978 |
|
SU754091A1 |
| ПОДВЕСКА ГУСЕНИЧНОЙ МАШИНЫ | 1991 |
|
RU2025378C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2364540C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР ДЛЯ ОБРАБОТКИ СУБТРОПИЧЕСКИХ КУЛЬТУР С ПЕРЕМЕННОЙ ШИРИНОЙ КОЛЕИ И ВЫСОТОЙ ЕГО ПОПЕРЕЧНОЙ БАЗЫ | 1947 |
|
SU79576A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ (ВАРИАНТЫ) | 2019 |
|
RU2720694C1 |
Изобретение относится к той части робототехники, где манипулятор вместе с гусеничным шасси представляет собой единый мобильный робототехнический комплекс с автономным питанием и системой дистанционного управления, предназначенный для работы в средах, где присутствие человека недопустимо. Гусеничное шасси имеет дифференциальный механизм изменения клиренса шасси и геометрии гусеничных обводов, который включает в себя подвижные бортовые синхронизаторы, поперечные траверсы и общий центральный привод. При этом на бортовых синхронизаторах ленивцы, блоки поддерживающих роликов и тележки опорных катков установлены так, что при повороте бортовых синхронизаторов длина гусеничных обводов остается неизменной, опорные катки, ленивцы и блоки поддерживающих роликов находятся во взаимодействии с внутренними поверхностями гусениц, а величина клиренса изменяется пропорционально углу поворота бортовых синхронизаторов. Техническим результатом является возможность изменения угла атаки переднего гусеничного свеса, клиренса, площади опорной поверхности и перемещения ребра опрокидывания. 6 ил.
Мобильный робототехнический комплекс с дистанционным управлением, предназначенный для работы в экстремальных ситуациях, например, при предотвращении или ликвидации техногенных аварий, содержащий гусеничное шасси с манипулятором, с блоками управления и энергетической установкой и пост дистанционного управления, отличающийся тем, что гусеничное шасси имеет дифференциальный механизм синхронного изменения величины клиренса и геометрии гусеничных обводов, включающий в себя два бортовых синхронизатора, которые установлены вдоль бортов корпуса гусеничного шасси внутри гусеничных обводов и которые шарнирно с возможностью покачивания в вертикальной плоскости соединены с корпусом гусеничного шасси, поперечную траверсу с резинометаллическими шарнирами на концах, посредством которых бортовые синхронизаторы соединены между собой, и центральный привод поступательного движения, подвижный шток которого через промежуточный рычаг соединен с поперечной траверсой, а сам привод с возможностью покачивания в вертикальной плоскости шарнирно соединен с корпусом гусеничного шасси, и при этом каждый бортовой синхронизатор состоит из жесткой пространственной рамы, включающей в себя параллельные щеки и соединяющие их поперечные стяжки, и установленные в головной части пространственной рамы - ленивец и на заднем конце пространственной рамы - блок поддерживающих роликов, а в нижней ее части неподвижно установленные несущий вал и асимметрично относительно оси несущего вала опорную ось, где консольный конец несущего вала шарнирно соединен с корпусом гусеничного шасси, а на опорной оси шарнирно с возможностью покачивания в вертикальной плоскости установлен кронштейн гусеничной тележки с опорными катками и, кроме того, ленивцы, блоки поддерживающих роликов и кронштейны гусеничных тележек установлены в вертикальных щеках пространственных рам бортовых синхронизаторов относительно осей несущих валов так, что при изменении геометрии гусеничных обводов путем поворота бортовых синхронизаторов в вертикальной плоскости длина гусеничных обводов остается неизменной, опорные катки гусеничных тележек, ленивцы и блоки поддерживающих роликов постоянно находятся во взаимодействии с внутренними поверхностями каждого гусеничного обвода, а величина клиренса изменяется пропорционально углу поворота бортовых синхронизаторов дифференциального механизма.
| Гражданская защита | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Интуиция-опыт-расчет | |||
| RU 94027945 A, 10.07.1996 | |||
| US 5022812 A, 11.06.1991. | |||

