Изобретение относится к области инструментов, к инструментам для выполнения работ как в обычных условиях, так и в особых условиях открытого космоса, под водой и т.п., операторами как в скафандре, так и без них.
Известно устройство для резки изолированных проводников [1], содержащее две шарнирно соединенных рукоятки с взаимодействующими лезвиями, смещающимися относительно друг друга вокруг общей оси вращения и имеющих профилированную поверхность.
Однако указанная конструкция исключает возможность горизонтального сведения кромок лезвий, максимально приближенного к теоретической линии, перпендикулярной продольной оси устройства, при их большем растворе и не позволяет использовать съемные рабочие губки.
Наиболее близким по технической сущности к заявляемому изобретению является инструмент для зажима [2], состоящий из рукояток, рабочих губок на свободных концах рычагов, имеющих общую ось вращения, один из рычагов жестко закреплен на одной рукоятке, а другой шарнирно связан с другой рукояткой, и рычаги соединяются между собой при помощи промежуточного звена посредством осей вращения, а также храпового механизма ограничения хода.
Однако указанный прототип позволяет проводить операции по зажиму только на ограниченном раствором губок участке из-за наличия единой для них оси вращения, а при увеличении раствора губок за счет увеличения геометрических параметров конструкции, без изменения кинематики конструкции, невозможно сведение рабочих губок, максимально приближенного к теоретической линии, перпендикулярной продольной оси инструмента, при этом замена губок влечет за собой переборку и переналадку всей конструкции.
Задачей заявляемого изобретения является создание универсального инструмента для зажима и перемещения различных объектов в труднодоступных местах, а при наличии жизнеопасных условий окружающей среды - и с использованием специального снаряжения, например скафандра, в космосе, под водой, верхолазами и т.п.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является, например, аварийное открытие защелок кольца активного агрегата стыковки транспортного космического корабля, типа ШАТТЛ, в случае, если защелки кольца не выходят из зацепления с защелками корпуса пассивного агрегата, например, космической станции в результате отказа электрического провода открытия защелок и невозможности втягивания кольца активного агрегата за счет синхронного перемещения штанг при несрабатывании привода стыковочного механизма. Таким образом, ручное открытие защелок кольца без использования скафандра исключено из-за негерметичности стыка, а в скафандре - из-за невозможности доступа к месту расположения защелок для их открытия рукой в перчатке, поэтому без принудительного открытия защелок кольца инструментом для зажима расстыковка космических аппаратов невозможна.
Поставленная задача решается тем, что в инструменте для зажима, преимущественно для работы в труднодоступных местах, например в объеме внутренней полости стыковочного агрегата в условиях вакуума, содержащем рукоятки, рычаги с рабочими губками на свободных концах, по крайней мере одно промежуточное звено, связывающее рычаги посредством осей вращения, в отличие от прототипа, введены цапфы, связывающие каждую из рукояток с соответствующим рычагом посредством шарнира, при этом цапфы выполнены с ушками, связанными между собой единой осью вращения, и снабжены ограничителями хода сведения рукояток, а рычаги контактируют между собой шестеренчатыми зубьями, выполненными на внутренних полукруглых поверхностях рычагов в зоне установки по крайней мере одного промежуточного звена.
Рукоятки предлагается выполнить съемными и снабженными связывающими каждую цапфу с соответствующей рукояткой замками с пластинчатыми пружинами, закрепленными на рукоятках посредством осей поворота.
Рабочие губки предлагается выполнить съемными и закрепляемыми на рычагах посредством разъемного резьбового соединения.
Ограничители хода предлагается выполнить регулируемыми посредством перемещения каждого из них вдоль резьбового соединения, перпендикулярного продольной оси соответствующей цапфы.
Предлагается рукоятки выполнить многогранного сечения по всей длине, например прямоугольной конфигурации.
Реализацию конструкции инструмента для зажима рассмотрим на примере устройства, предоставленного на фиг.1-5, на которых приведены:
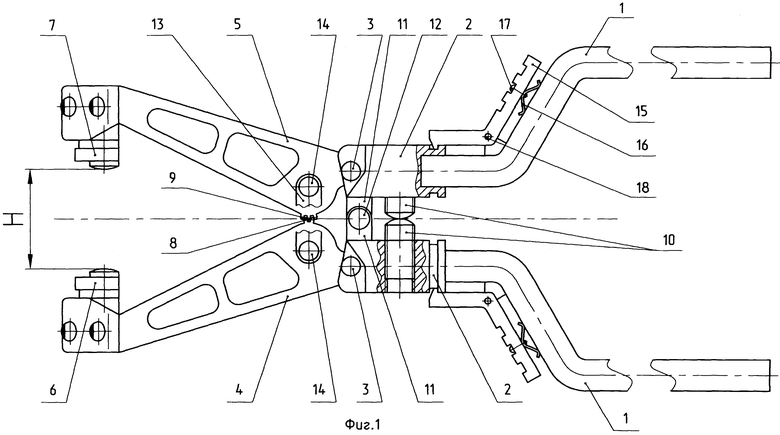
на фиг.1 - общий вид инструмента;
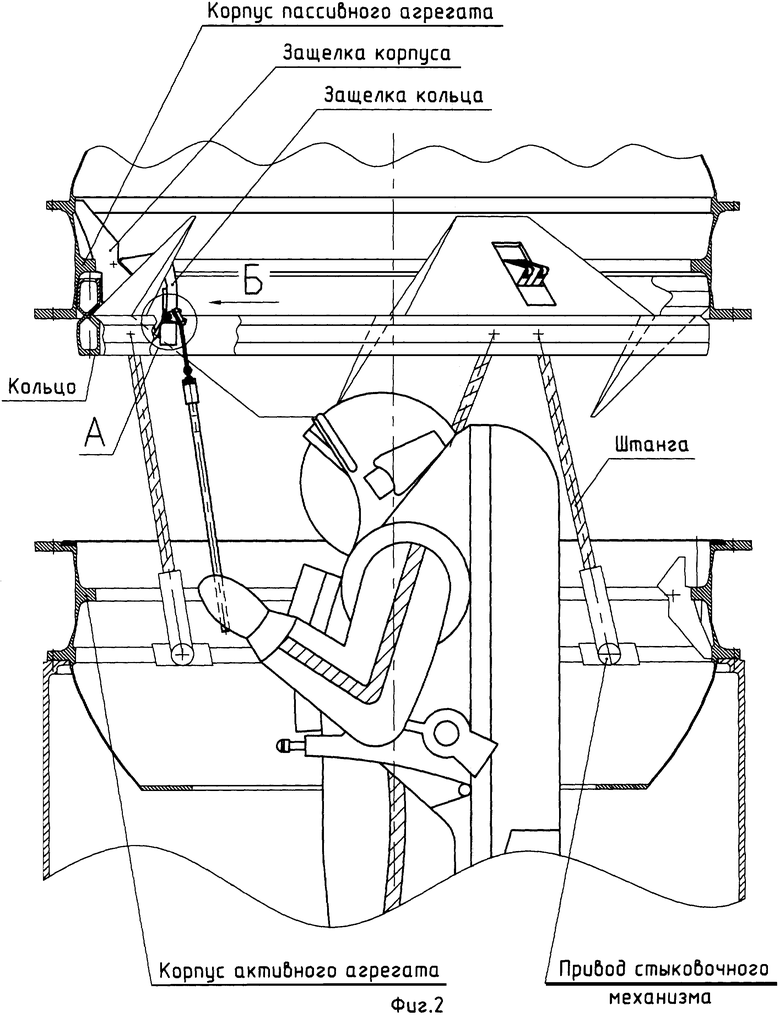
на фиг.2 - рабочая зона оператора;
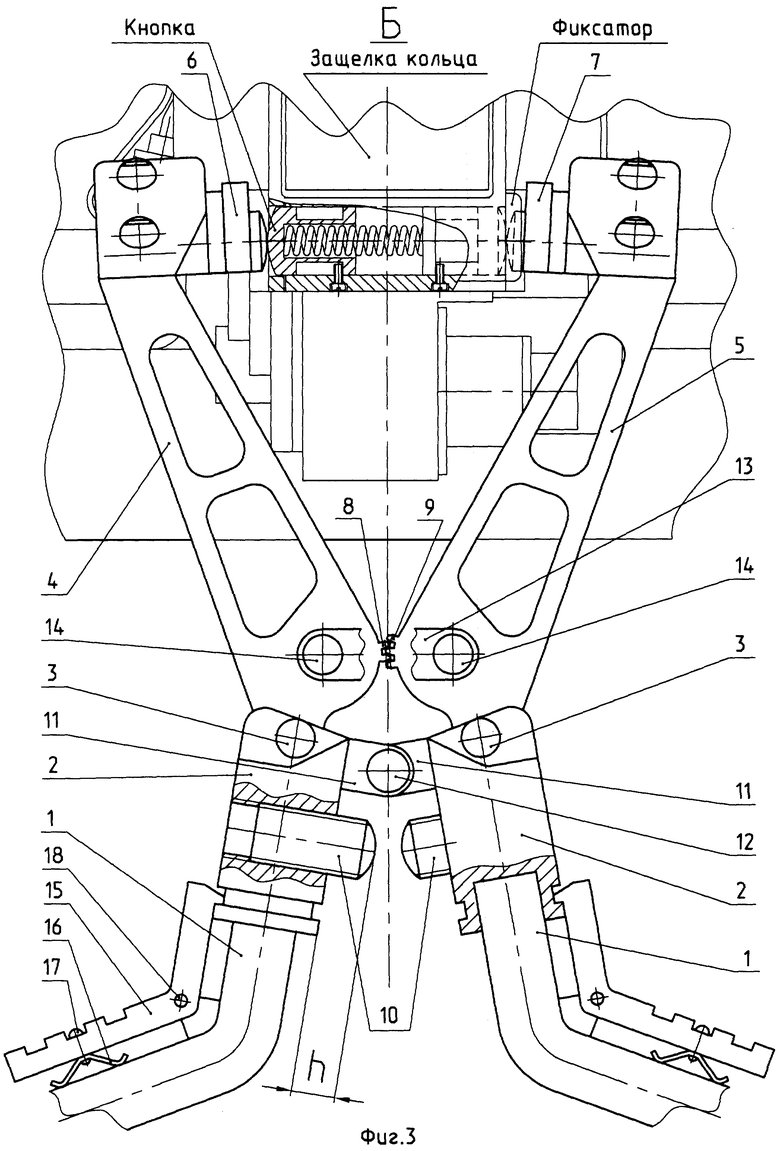
на фиг.3 - исходное положение инструмента;
на фиг.4 - конечное положение инструмента;
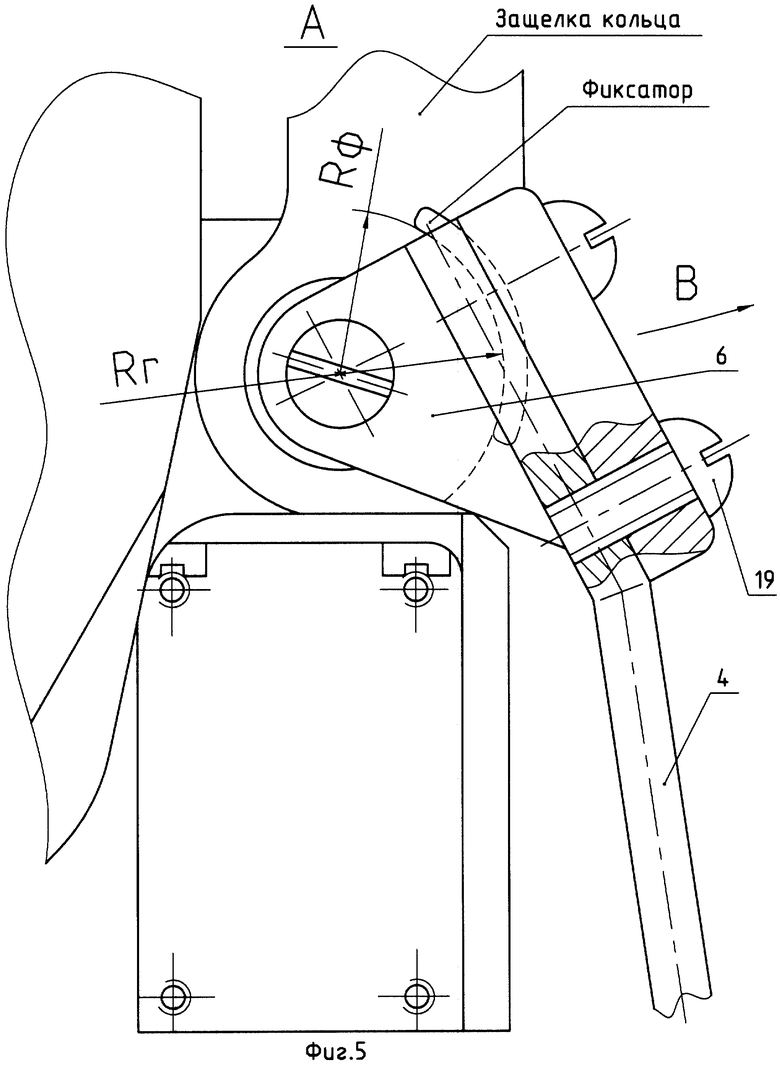
на фиг.5 - фиксация инструмента на защелке и способ крепления съемных губок.
Инструмент для зажима содержит рукоятки 1, каждая из которых связана через цапфу 2, закрепленную на рукоятке 1, посредством шарнира 3, с соответствующим рычагом 4 или 5, а рабочие губки 6 или 7 выполнены профилированными и расположены на свободных концах рычагов 4 или 5 соответственно, при этом рычаги 4 и 5 снабжены шестеренчатыми зубьями 8 и 9 соответственно на внутренних поверхностях. Цапфы 2, снабженные ограничителями хода 10, выполнены с ушками 11, связанными между собой единой осью вращения 12, а рычаги 4 и 5 связаны между собой промежуточными звеньями 13 посредством осей вращения 14 и контактируют между собой шестеренчатыми зубьями 8 и 9, количество которых выбрано с учетом максимально необходимого угла поворота рычагов 4 и 5 при выполнении необходимых операций. Рукоятки 1 предлагается выполнить съемными и снабдить замками 15, связывающими каждую цапфу 2 с соответствующей рукояткой 1, при этом замки 15 снабжены пластинчатыми пружинами 16, закрепленными на замках 15 механически, например, с помощью клепки 17, причем замки 15 закреплены на рукоятках 1 посредством оси поворота 18. На наружной поверхности каждой из цапф 2 выполнена канавка, куда западает выступающий зуб замка 15 под действием пружины 16, связывая каждую цапфу 2 с соответствующей рукояткой 1. Рабочие губки 6 и 7 выполнены с такими геометрическими параметрами, которые позволяют их однозначную установку на рабочую поверхность защелки с учетом диаметра D нажимаемых подпружиненных кнопок, расстояния L, необходимого при их утапливании в корпус защелки для ее открытия, а так же, используя дугообразные фиксаторы, выполненные на защелке, необходимые для упора пальцами руки после утапливания подпружиненных кнопок при ручном открытии защелок, для чего дугообразная поверхность рабочих губок выполнена радиусом Rr, равным внутреннему радиусу Rф дугообразных фиксаторов. Размер Н между сферическими поверхностями губок 6 и 7 выполняется при условии сведения рукояток 1 до касания сферическими поверхностями ограничителей хода 10 друг друга и обеспечивает гарантированное открытие защелок инструментом.
Учитывая сложности обеспечения проведения работ по открытию защелок кольца в четко определенных, ограниченных внутренними размерами активного стыковочного агрегата, условиях, было выбрано оптимальное соотношение геометрических параметров составных узлов инструмента, а именно расстояние между осью вращения 14 промежуточного звена 13 и осью шарнира 3, связывающего цапфу 2 с соответствующим рычагом 4 или 5, принято равным расстоянию между осью этого же шарнира 3 и осью вращения 12, связывающей ушки 11 цапф 2, что позволяет при небольшом угле разведения рукояток 1 обеспечить гарантированный подвод рабочих губок 6 и 7 инструмента к подпружиненным кнопкам защелки, находящейся в труднодоступной ограниченной зоне свободного пространства стыковочного агрегата, осуществить обжим подпружиненных кнопок и произвести открытие защелки кольца.
Объясним работу с инструментом для зажима при использовании его для открытия защелок кольца активного стыковочного агрегата.
Андрогинный периферийный агрегат стыковки (АПАС) предназначен для выполнения механических функций по обеспечению жесткого и герметичного механического соединения. В процессе стыковки осуществляется образование внутреннего герметичного перехода между состыкованными объектами.
При стыковке АПАС, установленный на космической станции, работает в пассивном режиме, а АПАС, установленный на транспортном корабле, например, типа ШАТТЛ, работает в активном режиме.
При совмещении колец срабатывают защелки кольца активного агрегата (входят в зацепление с защелками корпуса пассивного агрегата), и происходит сцепка агрегатов. Стягивание изделий осуществляется приводом стыковочного механизма за счет втягивания кольца активного агрегата.
Механическая связь по защелкам нарушается после закрытия крюков стыка на заключительном этапе стыковки, при этом осуществляется открытие защелок кольца активного агрегата (защелки кольца выходят из зацепления с защелками корпуса пассивного агрегата). После чего, за счет работы пружинных толкателей, изделия расходятся.
В случае невозможности штатного открытия защелок кольца необходима операция по ручному открытию защелок кольца активного агрегата.
Оператор в скафандре с инструментом перемещается в зону проведения работ и, закрепившись, подводит рабочие губки 6 и 7 инструмента к подпружиненным кнопкам защелок кольца. Сведя рукоятки 1 до упора сферическими поверхностями ограничителей хода 10 друг в друга и делая упор в дугообразные фиксаторы защелки, расположенные на ее боковых сторонах, путем перемещения инструмента на себя по стрелке В, оператор производит открытие защелок. После этого оператор перемещается в безопасную зону нахождения и предоставляется возможность расстыковки космических объектов. Ограничители хода 10 выставлены таким образом, чтобы при сведении рукояток 1 до упора их сферическими поверхностями расстояние между сферическими поверхностями профилированных рабочих губок 6 и 7 составляло величину Н, соответствующую геометрическим размерам защелки, а профилированные рабочие губки 6 и 7 имеют конфигурацию, позволяющую их однозначную установку в зону нажима на подпружиненные кнопки и упор в дугообразные фиксаторы защелки, причем дугообразная поверхность рабочих губок 6 и 7 выполнена радиусом, равным внутреннему радиусу дугообразных фиксаторов защелки кольца.
За счет разноса осей вращения рычагов 4 и 5 в стороны друг относительно друга, перпендикулярные продольной оси инструмента, возможно горизонтальное сведение рабочих губок 6 и 7, максимально приближенное к теоретической линии, перпендикулярной продольной оси инструмента, а наличие шестеренчатых зубьев 8 и 9 необходимо для исключения проскальзывания внутренних полукруглых торцевых поверхностей рычагов 4 и 5 в зоне контакта друг относительно друга для обеспечения симметричного сведения рычагов 4 и 5 относительно продольной оси инструмента.
Для случаев выполнения каких-либо других работ, связанных с применением данного инструмента, например, по захвату, зажиму и перемещению определенных предметов, рабочие губки 6 и 7 выполнены съемными и заменяются на губки нужной конфигурации. Крепление и демонтаж рабочих губок 6 и 7 на рычагах 4 и 5 проводится любым разъемным резьбовым соединением, например, винтами 19.
Для выставления необходимого размера Н между замененными рабочими губками с определенной точностью и создания заранее заданного усилия зажима перемещаемого, например, хрупкого предмета ограничители хода 10 выполнены регулируемыми по высоте h выступания из цапф 2 за счет применения резьбового соединения.
В случае невозможности использования рукояток 1 данной конфигурации и длины возможна замена их на другую необходимую конструкцию, снабженную замками 15, связывающими каждую цапфу 2 с соответствующей рукояткой 1, при этом замки 15 снабжены пластинчатыми пружинами 16, закрепленными на замках 15 механически, например, с помощью клепки 17, причем замки 15 закреплены на рукоятках 1 посредством оси поворота 18. На наружной поверхности каждой из цапф 2 выполнена канавка, куда западает выступающий зуб замка 15 под действием пластинчатой пружины 16, связывая каждую цапфу 2 с соответствующей рукояткой 1, после снятия усилия нажатия с ребристой наружной поверхности замка 15 по окончании установки рукоятки 1 в цапфу 2. Так же возможность съема рукояток 1 позволяет значительно уменьшить габариты, занимаемые инструментом при транспортировке, особенно в условиях ограниченного пространства, например, космического объекта.
Для исключения проворачивания рукояток 1 необходимой конфигурации относительно продольной оси цапф 2 и обеспечения фиксации рукояток 1 в нужном положении относительно продольной оси инструмента рукоятки 1 выполнены многогранного сечения по всей длине, например прямоугольного, а также предложенная конфигурация сечения рукояток 1 обеспечивает надежный захват рукояток 1 перчатками оператора в скафандре.
Литература
1. Заявка Великобритания №1566267, 1980г.
2. Заявка Великобритания №2072081, 1981г. - прототип.
3. Заявка Великобритания №1522144, 1978г.
4. “Справочник машиностроителя”. Под ред. Н.С.Ачеркана. М.: “МАШГИЗ”, т. 1, гл. 22, с. 470-487.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инструмент для скругления жил кабеля | 1974 |
|
SU720600A1 |
| Инструмент для удаления изоляции с концов электрических проводов | 1985 |
|
SU1309143A1 |
| Инструменты для наложения клипс на сосуды мозга и его оболочек | 1961 |
|
SU145976A1 |
| ЗАЖИМ С САМОФИКСАЦИЕЙ | 1995 |
|
RU2068528C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
| Хирургический инструмент для фиксации полового члена во время оперативного вмешательства | 2023 |
|
RU2829690C1 |
| Устройство для контактной стыковой сварки многопроволочных изделий | 1981 |
|
SU990454A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| НАБОР ИНСТРУМЕНТОВ ДЛЯ ОПЕРИРОВАНИЯ ИЗ МАЛЫХ РАЗРЕЗОВ | 2005 |
|
RU2286723C1 |
| ХИРУРГИЧЕСКИЙ ЗАЖИМ ДЛЯ ПЕРЕЖАТИЯ ПОЧКИ ПАЦИЕНТА ПРИ РЕЗЕКЦИИ | 2011 |
|
RU2494692C2 |

Изобретение относится к области инструментов для выполнения работ в обычных и в особых условиях открытого космоса, под водой и т.п. Технический результат - создание универсального инструмента для зажима и перемещения различных объектов в труднодоступных местах. Инструмент содержит рукоятки, рычаги с рабочими губками на свободных концах, по крайней мере, одно промежуточное звено, связывающее рычаги посредством осей вращения, цапфы, связывающие каждую из рукояток с соответствующим рычагом посредством шарнира, выполнены с ушками, связанными между собой единой осью вращения, и снабжены ограничителями хода сведения рукояток, а рычаги контактируют между собой шестеренчатыми зубьями, выполненными на внутренних полукруглых поверхностях рычагов в зоне установки промежуточного звена. Рукоятки могут быть съемными, снабженными замками и выполненными многогранного сечения по всей длине. 4 з.п. ф-лы, 5 ил.
| УСТРОЙСТВО ВЫВЕРКИ ОХОТНИЧЬЕГО ПРИЦЕЛА С НЕПОДВИЖНОЙ ПРИЦЕЛЬНОЙ СЕТКОЙ | 1992 |
|
RU2072081C1 |
| US 5339712 A, 23.08.1994 | |||
| КЛЕЩИ-КУСАЧКИ | 2000 |
|
RU2190507C2 |
| Ручной инструмент для монтажа и демонтажа пружинных стопорных колец | 1989 |
|
SU1655770A1 |
| Ручной инструмент для монтажа и демонтажа пружинных колец | 1990 |
|
SU1794640A1 |
| Ручные ножницы | 1978 |
|
SU747633A1 |
| US 6070504 A, 06.07.2000 | |||
| GB 1098292 A, 23.10.1964 | |||
| US 3527125 A, 08.09.1970. | |||

