Изобретение относится к области машиностроения и может найти применение, в частности, в механизмах свободного хода инерционных трансформаторов.
Известны механизмы свободного хода для инерционных трансформаторов (см. Леонов Д.И. Микрохраповые механизмы свободного хода. - М.: Машиностроение, 1982).
В инерционном трансформаторе блок храповых механизмов свободного хода служит для преобразования колебательного движения промежуточного вала-реактора во вращательное движение путем передачи прямого импульса на выходной вал от импульсатора и торможения обратного импульса.
В известных конструкциях оба механизма свободного хода устанавливаются последовательно на промежуточном валу-реакторе, который совершает колебания в соответствии с частотой прямого и обратного импульсов.
Последовательная установка механизмов свободного хода на промежуточном валу-реакторе увеличивает его размеры и, следовательно, момент инерции. Большой момент инерции реактора является причиной значительных инерционных нагрузок в элементах инерционного трансформатора и приводит к ухудшению его работы.
Известны пути решения этой проблемы. Концентричное расположение обоих механизмов свободного хода позволяет значительно сократить длину вала реактора. Известен блок микрохраповых механизмов (см. полезную модель № 12445, F 16 H 27/02, 1999 г.), состоящий из неподвижного корпуса, храповых колес, подпружиненных собачек, реактора и выходного вала, расположенных концентрично и образующих корпусной и выходной механизмы свободного хода, при этом собачки корпусного механизма расположены на наружной поверхности корпуса-реактора выходного механизма, на внутренней поверхности которого выполнены храповые зубья внутреннего зацепления, а собачки выходного механизма свободного хода расположены на выходном валу. Пружины необходимы для постоянного поджатия собачек к храповым зубьям.
Недостатком устройства является сложность конструкции из-за наличия пружин, поджимающих собачки к зубьям.
Наиболее близким по технической сущности является блок храповых механизмов свободного хода (см. DE 10017744 А1, кл. F 16 D 41/12, опубл. 11.10.2001), состоящий из неподвижного корпуса, храповых колес, собачек, выполненных в виде упругих пластин, реактора и выходного вала, расположенных концентрично и образующих корпусной и выходной механизмы свободного хода, при этом собачки размещены на внутренней и наружной поверхностях реактора, храповое колесо корпусного механизма свободного хода имеет зубья внешнего зацепления, связано с неподвижным корпусом и взаимодействует с собачками внутреннего ряда реактора, а храповое колесо выходного механизма свободного хода имеет зубья внутреннего зацепления, установлено на выходном валу и взаимодействует с собачками наружного ряда реактора.
Недостатком прототипа является выполнение собачек в виде упругих пластин, которые снижают надежность конструкции вследствие возможной поломки упругих пластин и увеличивают потери на трение собачек о храповые зубья, постоянно происходящее в процессе работы.
Технический результат, получаемый от использования изобретения, заключается в повышении надежности конструкции.
Указанный технический результат достигается тем, что в блоке храповых механизмов свободного хода, состоящий из неподвижного корпуса, храповых колес, собачек, реактора и выходного вала, расположенных концентрично и образующих корпусной и выходной механизмы свободного хода, при этом собачки размещены на внутренней и наружной поверхностях реактора, храповое колесо корпусного механизма свободного хода имеет зубья внешнего зацепления, связано с неподвижным корпусом и взаимодействует с собачками внутреннего ряда реактора, а храповое колесо выходного механизма свободного хода имеет зубья внутреннего зацепления, установлено на выходном валу и взаимодействует с собачками наружного ряда реактора, собачки на реакторе выполнены с возможностью воздействия на них центробежных и тангенциальных сил, возникающих при вращении реактора и обеспечивающих прижатие собачек наружного ряда к зубьям храпового колеса выходного механизма в момент действия прямого импульса и прижатие собачек внутреннего ряда к зубьям храпового колеса корпусного механизма в момент действия обратного импульса.
Предлагаемая конструкция позволяет использовать силы инерции (тангенциальные и центробежные), возникающие вследствие колебательного движения реактора. Наружный ряд собачек устанавливается так, чтобы при действии прямого импульса собачки прижимались центробежными и тангенциальными силами к зубьям выходного механизма свободного хода, передавая крутящий момент на выходной вал. Собачки внутреннего ряда при прямом импульсе выводятся из зацепления с храповым колесом, совершая свободный ход. При торможении реактора, вследствие обратного импульса, уменьшается величина центробежной силы и тангенциальное усилие направляется в сторону торможения. Это приводит к выходу собачек выходного механизма свободного хода из контакта с храповым колесом и поджатию к храповому колесу собачек корпусного механизма свободного хода. Происходит включение корпусного механизма свободного хода с передачей обратного импульса на корпус трансформатора и свободный ход выходного механизма свободного хода.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
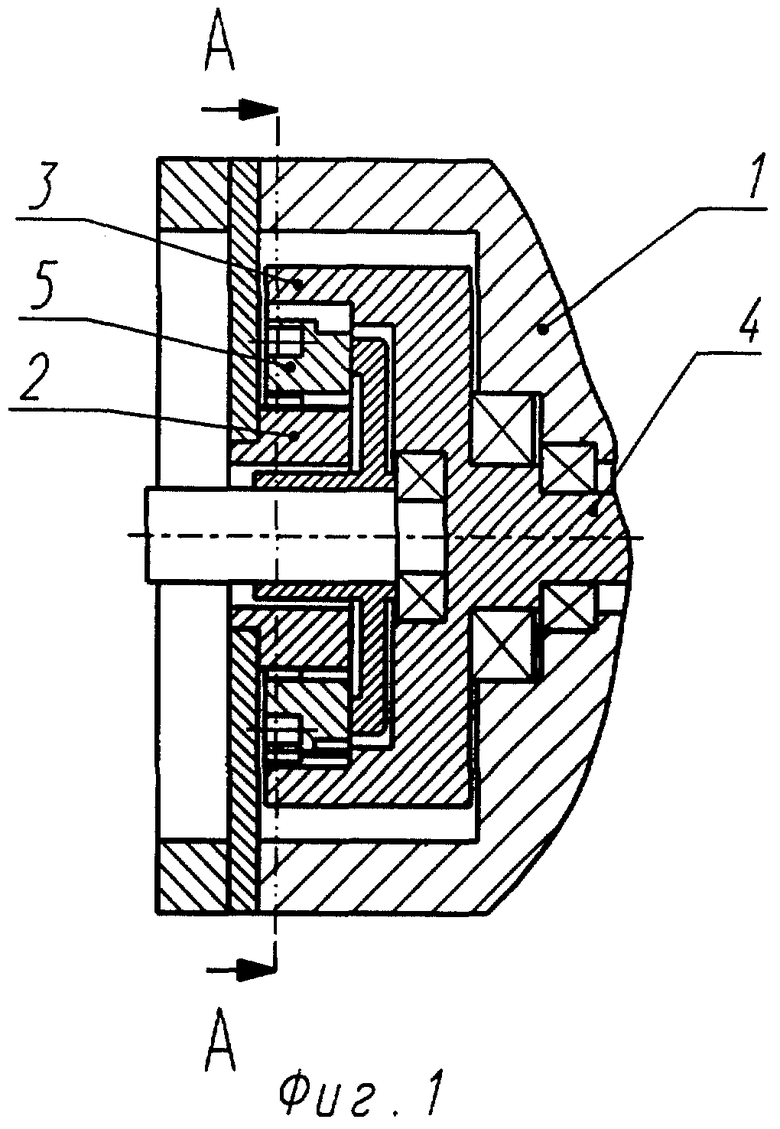
Сущность изобретения поясняется чертежами, где на фиг.1 изображен блок храповых механизмов свободного хода, общий вид, а на фиг.2 - то же, разрез А-А.
Блок храповых механизмов свободного хода, состоящий из неподвижного корпуса 1, храпового колеса 2 с зубьями наружного зацепления, жестко соединенного с корпусом 1, храпового колеса 3 с зубьями внутреннего зацепления, жестко соединенного с выходным валом 4. Между храповыми колесами 2 и 3 установлен реактор 5, на внутренней и наружной поверхностях которого размещены соответственно собачки 6 и 7, взаимодействующие соответственно с храповыми зубьями колес 2 и 3. Все элементы устройства концентрично расположены относительно друг друга.
Корпус 1, храповое колесо 2, собачки 6 и реактор 5 образуют корпусной механизм свободного хода, а реактор 5, собачки 7, храповое колесо 3 и выходной вал 4 образуют выходной механизм свободного хода.
Собачки 6 и 7 на реакторе 5 выполнены с возможностью воздействия на них центробежных и тангенциальных сил, возникающих при вращении реактора 5 и обеспечивающих прижатие собачек 7 наружного ряда к зубьям храпового колеса 3 выходного механизма в момент действия прямого импульса и прижатие собачек 6 внутреннего ряда к зубьям храпового колеса 2 корпусного механизма в момент действия обратного импульса.
Блок храповых механизмов работает следующим образом. В момент возникновения прямого импульса реактор 5 вращается с ускорением, например, по часовой стрелке, собачки 7 наружного ряда под действием центробежных и тангенциальных сил прижимаются к зубьям храпового колеса 3, передавая импульс момента на выходной вал 4. Собачки 6 внутреннего ряда под действием центробежных и тангенциальных сил инерции отжимаются от зубьев храпового колеса 2. При возникновении обратного импульса меняется направление тангенциального ускорения, а центробежное ускорение уменьшается и собачки 7 отходят от зубьев храпового колеса 3, снижая трение собачек о поверхность храповых зубьев. Собачки 6 внутреннего ряда под действием центробежных и тангенциальных сил входят в зацепление с зубьями храпового колеса 2 и происходит передача обратного импульса на неподвижный корпус 1 трансформатора, при этом происходит свободный ход выходного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА С СИММЕТРИЧНЫМ ЗАЦЕПЛЕНИЕМ | 2004 |
|
RU2258845C1 |
| Импульсный вариатор | 1988 |
|
SU1557397A1 |
| ЧЕТЫРЕХТАКТНЫЙ РОТОРНО-ЛОПАСТНОЙ ТАНГЕНЦИАЛЬНЫЙ ДВИГАТЕЛЬ ИВШИНА | 2000 |
|
RU2212545C2 |
| Муфта свободного хода | 1975 |
|
SU826122A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| Механизм свободного хода | 1983 |
|
SU1171616A1 |
| ВЕДУЩИЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2248890C1 |
| Механизм свободного хода | 1974 |
|
SU489891A2 |
| Реверсивная храповая муфта | 1986 |
|
SU1392268A1 |

Изобретение относится к области машиностроения и может найти применение в механизмах свободного хода инерционных трансформаторов. Блок храповых механизмов свободного хода состоит из неподвижного корпуса, храповых колес, собачек, реактора и выходного вала, расположенных концентрично и образующих корпусной и выходной механизмы свободного хода. Собачки размещены на внутренней и наружной поверхностях реактора. Храповое колесо корпусного механизма свободного хода имеет зубья внешнего зацепления, связано с неподвижным корпусом и взаимодействует с собачками внутреннего ряда реактора, а храповое колесо выходного механизма свободного хода имеет зубья внутреннего зацепления, установлено на выходном валу и взаимодействует с собачками наружного ряда реактора. Собачки на реакторе выполнены с возможностью воздействия на них центробежных и тангенциальных сил, возникающих при вращении реактора и обеспечивающих прижатие собачек наружного ряда к зубьям храпового колеса выходного механизма в момент действия прямого импульса и прижатие собачек внутреннего ряда к зубьям храпового колеса корпусного механизма в момент действия обратного импульса. Техническим результатом является упрощение конструкции и повышение ее надежности. 2 ил.
Блок храповых механизмов свободного хода, состоящий из неподвижного корпуса, храповых колес, собачек, реактора и выходного вала, расположенных концентрично и образующих корпусной и выходной механизмы свободного хода, при этом собачки размещены на внутренней и наружной поверхностях реактора, храповое колесо корпусного механизма свободного хода имеет зубья внешнего зацепления, связано с неподвижным корпусом и взаимодействует с собачками внутреннего ряда реактора, а храповое колесо выходного механизма свободного хода имеет зубья внутреннего зацепления, установлено на выходном валу и взаимодействует с собачками наружного ряда реактора, отличающийся тем, что собачки на реакторе выполнены с возможностью воздействия на них центробежных и тангенциальных сил, возникающих при вращении реактора и обеспечивающих прижатие собачек наружного ряда к зубьям храпового колеса выходного механизма в момент действия прямого импульса и прижатие собачек внутреннего ряда к зубьям храпового колеса корпусного механизма в момент действия обратного импульса.
| DE 10017744 A1, 11.10.2001 | |||
| US 4363390 A, 14.12.1982 | |||
| Электрическая машина, работающая в жидкости | 1928 |
|
SU12445A1 |
| Зраповая обгонная муфта | 1975 |
|
SU555239A1 |

