Изобретение относится к экспериментальной аэродинамике и может быть использованы в качестве способа и реализующих его устройств при исследованиях аэродинамических характеристик моделей летательных аппаратов (ЛА) в аэродинамических трубах.
Известен динамометрический способ определения аэродинамических сил и моментов /1/, основанный на их измерении посредством системы динамометров, на которых крепится модель ЛА. Этот способ обеспечивает измерение шести компонент (три аэродинамические силы и три аэродинамических момента) и позволяет определить создаваемую рулевыми органами модели подъемную силу, но не позволяет определить шарнирный момент рулевых органов модели.
Система динамометров вместе с креплением модели составляют аэродинамические весы, которые служат основным измерительным устройством в аэродинамических трубах. Известные конструкции аэродинамических весов /2/ также не обеспечивают измерение шарнирного момента рулевых органов модели.
Наиболее близким к заявляемому способу по совокупности существенных признаков и достигаемому эффекту является принятый за прототип способ определения момента вращения /3/, основанный на определении величины момента по углу скручивания вращающегося вала. Применение этого способа для определения шарнирного момента рулевых органов модели предполагает измерение угла скручивания оси рулевых органов и требует неоднократной фиксации рулевых органов в диапазоне углов -δ m≤δ≤+δ m, где δ - угол отклонения рулевых органов модели, а±δ m - максимальные значения этого угла. При этом для установки угла δ необходима остановка аэродинамической трубы и последующий вывод ее на режим, что связано с непроизводительными затратами энергии.
Наиболее близким к заявляемым устройствам по совокупности существенных признаков и достигаемому эффекту являются принятые за прототип трехкомпонентные аэродинамические весы тензометрического типа /4/, содержащие размещенные в корпусе модели датчики деформаций с упругими элементами и преобразователями деформаций в электрические сигналы (тензодатчики). Однако выполнение оси рулевых органов модели с упругими элементами и тензодатчиками обеспечивает измерение шарнирного момента только при фиксированном угле δ .
Задача заявляемых способов и реализующих его устройств - снижение энергетических затрат при испытаниях моделей ЛА в аэродинамической трубе за счет совмещения измерений на аэродинамических весах с измерением шарнирного момента рулевых органов модели внутримодельным устройством при обеспечении дистанционного управления рулевыми органами модели.
Для решения этой задачи в заявляемом способе определения шарнирного момента рулевых органов модели летательного аппарата при испытании в аэродинамической трубе, включающем определение величины вращающего момента по углу скручивания торсиона, в процессе испытаний внутримодельным приводом с торсионом в кинематической передаче устанавливают угол отклонения рулевых органов и измеряют угол поворота выходного вала привода, а действующий на рулевые органы шарнирный момент определяют по зависимости

где М - действующий на рулевые органы шарнирный момент, с - жесткость торсиона, δ - угол отклонения рулевых органов, γ - угол поворота выходного вала привода.
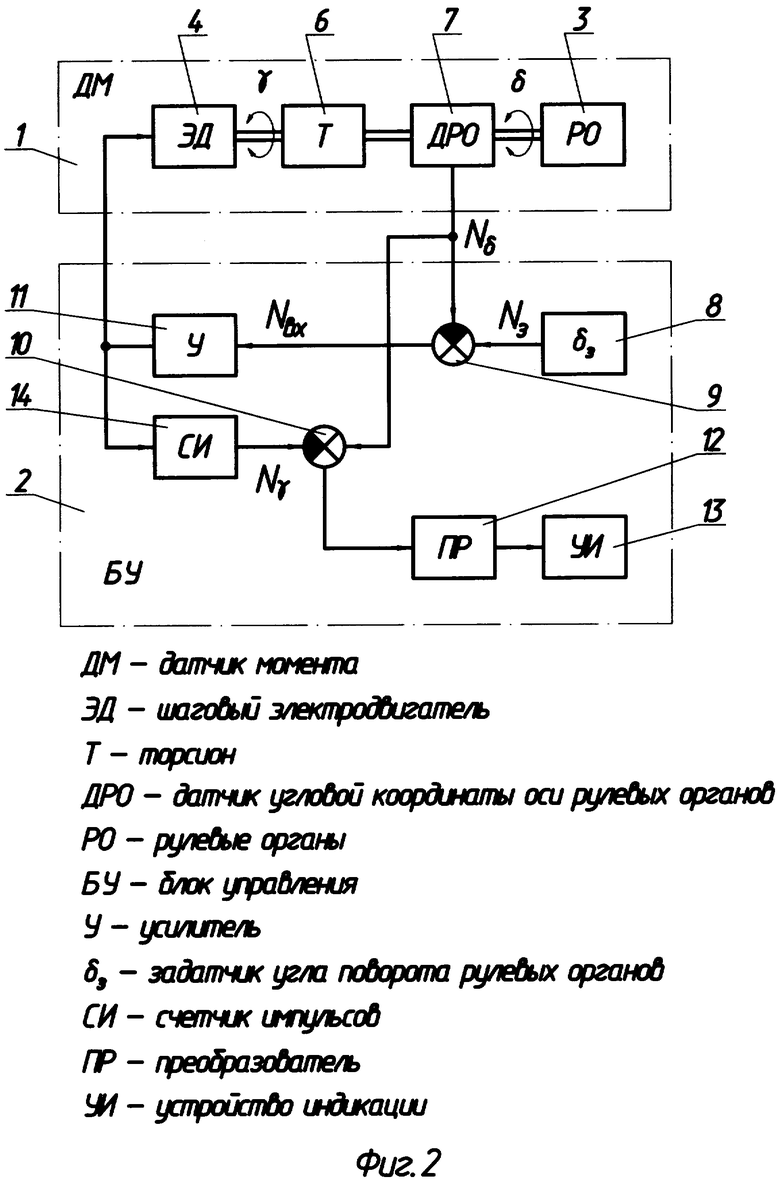
Для решения поставленной задачи в первый вариант устройства для определения шарнирного момента рулевых органов модели летательного аппарата при испытании в аэродинамической трубе, которое содержит размещенный в корпусе модели датчик деформаций с упругим элементом и преобразователем деформаций в электрический сигнал, введены электродвигатель поворота рулевых органов и блок управления, содержащий первый и второй сумматоры, задатчик угла поворота рулевых органов, усилитель, преобразователь и устройство индикации. Упругий элемент датчика деформаций выполнен в виде торсиона, а преобразователь деформаций в электрический сигнал - в виде датчиков угловых координат вала электродвигателя и оси рулевых органов, кинематически связанной через выходной вал датчика деформаций с одним концом торсиона, другой конец которого через входной вал датчика деформаций жестко связан с валом электродвигателя. При этом входы первого сумматора электрически соединены соответственно с выходом датчика угловой координаты рулевых органов и выходом задатчика угла поворота рулевых органов, выход первого сумматора - с входом усилителя, выход усилителя - с электродвигателем, входы второго сумматора - соответственно с выходами датчиков угловых координат оси электродвигателя и оси рулевых органов, выход второго сумматора - через преобразователь с устройством индикации.
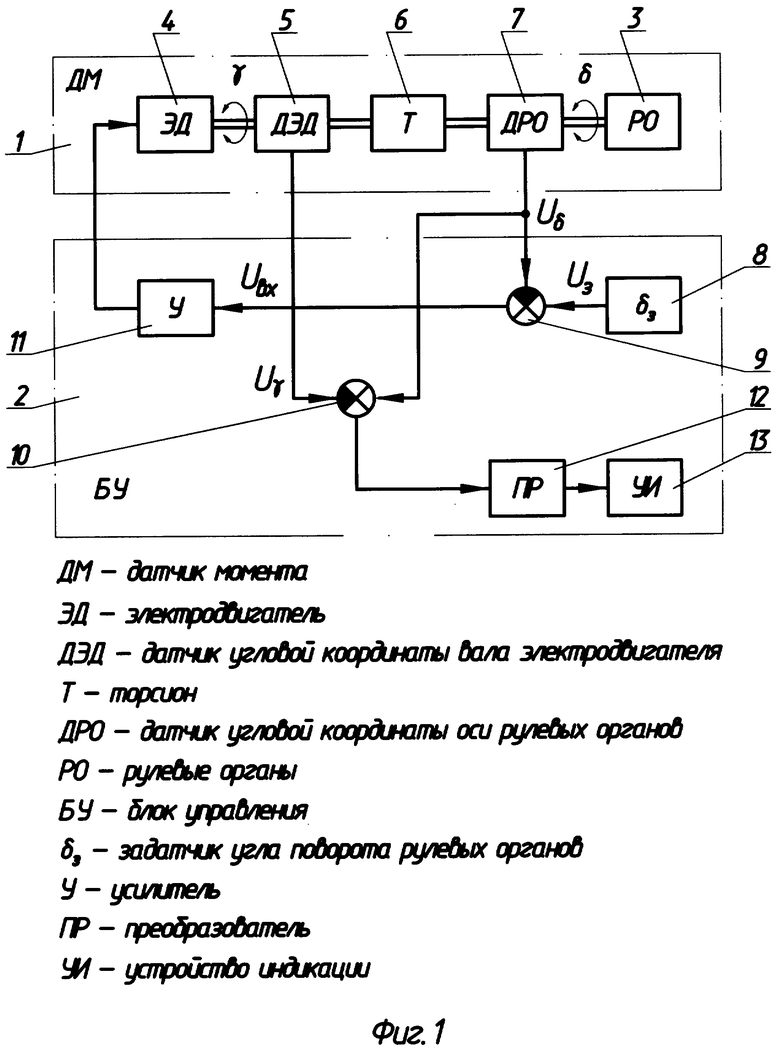
Для решения поставленной задачи во второй вариант устройства для определения шарнирного момента рулевых органов модели летательного аппарата при испытании в аэродинамической трубе, которое содержит размещенный в корпусе модели датчик деформаций с упругим элементом и преобразователем деформаций в электрический сигнал, введены шаговый электродвигатель поворота рулевых органов и блок управления, содержащий первый и второй сумматоры, задатчик угла поворота рулевых органов, усилитель, счетчик импульсов, преобразователь и устройство индикации. Упругий элемент датчика деформаций выполнен в виде торсиона, а преобразователь деформаций в электрический сигнал - в виде датчика угловой координаты оси рулевых органов, кинематически связанной через выходной вал датчика деформаций с одним концом торсиона, другой конец которого через входной вал датчика деформаций жестко связан с валом электродвигателя. При этом входы первого сумматора электрически соединены соответственно с выходом датчика угловой координаты рулевых органов и выходом задатчика угла поворота рулевых органов, выход первого сумматора - с входом усилителя, выход усилителя - с шаговым электродвигателем, входы второго сумматора - соответственно с выходом датчика угловой координаты оси рулевых органов и выходом счетчика импульсов, вход которого соединен с выходом усилителя, а выход второго сумматора - через преобразователь с устройством индикации.
Конструкции заявляемых устройств пояснены чертежами, где на фиг.1 представлена блок-схема первого варианта устройства, а на фиг.2 - блок-схема второго варианта устройства.
Осуществление заявляемого способа предполагает размещение в модели ЛА привода поворота рулевых органов, который дистанционно устанавливает и поддерживает их заданное угловое положение. При этом в кинематическую передачу от выходного вала привода к оси рулевых органов включен торсион, выполняющий две функции: первая - передача момента вращения от привода к рулевым органам, а вторая - упругая деформация (скручивание) под действием этого же момента вращения, который при заданном угловом положении рулевых органов компенсирует действие аэродинамического шарнирного момента, стремящегося либо установить рулевые органы в положение аэродинамического равновесия (например, δ =0 при угле атаки α =0 модели ЛА), что соответствует пружинному аэродинамическому моменту, либо отклонить рулевые органы до упора в положение δ =±δ m, что соответствует аэродинамическому моменту перекомпенсации. Однако в любом случае угол упругого скручивания торсиона пропорционален величине действующего на рулевые органы шарнирного момента. Поэтому, измеряя угол поворота выходного вала привода и зная угол отклонения рулевых органов, получим угол скручивания торсиона как разность этих углов, а известная жесткость торсиона позволяет определить действующий на рулевые органы модели ЛА шарнирный момент по зависимости (1).
Конкретную реализацию заявляемого способа рассмотрим на примере представленных ниже заявляемых устройств.
Первый вариант устройства (фиг.1) для определения шарнирного момента рулевых органов модели летательного аппарата при испытании в аэродинамической трубе состоит из датчика момента 1, размещенного непосредственно в модели ЛА, и блока управления 2, с которого дистанционно осуществляется управление угловым положением рулевых органов 3 модели ЛА. Датчик момента 1 включает электродвигатель 4 с датчиком 5 угловой координаты γ его вала, торсион 6 и датчик 7 угловой координаты 5 оси рулевых органов 3. Датчик 5 угловой координаты у вала электродвигателя, торсион 6 и датчик 7 угловой координаты 5 оси рулевых органов 3 составляют, упругий элемент которого выполнен в виде торсиона 6, а преобразователь его деформаций в электрический сигнал - в виде датчиков 5 и 6. В блок управления 2 входят задатчик 8 угла поворота рулевых органов 3, первый 9 и второй 10 сумматоры, усилитель 11, преобразователь 12 и устройство индикации 13.
Во втором варианте устройства (фиг.2) используется шаговый электродвигатель 4, что исключает необходимость в датчике 5 угловой координаты его вала. Функцию датчика 5 выполняет счетчик импульсов 14, так как количество импульсов, умноженное на шаг электродвигателя 4, определяет угол поворота его выходного вала. Поэтому в датчик деформаций второго варианта устройства входят упругий элемент - торсион 6 и преобразователь его деформаций в электрический сигнал в виде датчика 7 угловой координаты δ оси рулевых органов 3.
Первый вариант устройства (фиг.1) работает следующим образом.
При проведении исследований аэродинамических характеристик модели ЛА в аэродинамической трубе датчик момента 1 размещается непосредственно в модели, которая устанавливается на державке аэродинамических весов. Блок управления 2 устройством соединяется с датчиком момента 1 проводной связью и обычно размещается вместе с аппаратурой управления аэродинамической трубой.
С задатчика 8 угла поворота рулевых органов 3 на первый вход первого сумматора 9 подается электрический сигнал Uз соответствующий заданному углу δ з установки рулевых органов 3. Этот сигнал сравнивается с сигналом Uδ , который поступает на второй вход первого сумматора 9 с датчика 7 угловой координаты оси рулевых органов 3, и разность этих сигналов Uвx=Uз-Uδ подается на вход усилителя 11, формирующего управляющий сигнал на электродвигатель 4. Под действием этого сигнала электродвигатель 4 через торсион 6 разворачивает и удерживает рулевые органы 3 в положение δ з, при этом в первом сумматоре 9 сигнал с датчика 7 угловой координаты оси рулевых органов 3 компенсирует сигнал с задатчика 8, т.е. Uвх=Uз-Uδ =0. Действующий на рулевые органы 3 в положении δ з аэродинамический шарнирный момент компенсируется развиваемым моментом электродвигателя 4, а угол упругой деформации (скручивания) торсиона 6 пропорционален величине шарнирного момента. Эквивалентная углу скручивания электрическая величина определяется как разность сигнала Uδ , поступающего с датчика 7 угловой координаты оси рулевых органов 3 на первый вход второго сумматора 10, и сигнала Uγ , поступающего с датчика 5 угловой координаты вала электродвигателя 4 на второй вход второго сумматора 10. Разность сигналов Uδ -Uγ с выхода второго сумматора 10 поступает на преобразователь 12, в котором вычисляется величина действующего на рулевые органы 3 шарнирного момента по зависимости (2), аналогичной зависимости (1)

где kд - коэффициент передачи датчиков 5 и 7. Вычисленная величина шарнирного момента отображается и регистрируется на устройстве индикации 13, на вход которого поступает сигнал с преобразователя 12.
Управляя дистанционно угловым положением рулевых органов 3 модели ЛА и определяя величину действующего на них шарнирного момента, одновременно можно проводить измерение шести компонент на аэродинамических весах. Знание величины подъемной силы, создаваемой рулевыми органами 3, и действующего на них шарнирного момента обеспечивает получение аэродинамических характеристик в виде зависимостей коэффициента подъемной силы рулей и координаты ее приложения (центра давления) относительно, например, передней кромки рулевого органа, от углов атаки, скольжения и крена модели ЛА, а также угла отклонения рулевых органов и скорости набегающего воздушного потока.
В отличие от первого варианта устройства, в котором все электрические сигналы представлены в аналоговом виде, во втором варианте устройства (фиг.2) использованы функциональные элементы, связанные между собой цифровыми (импульсными) сигналами.
Шаговый электродвигатель 4 поворачивает свой выходной вал на один шаг (фиксированный угол) при подаче одного электрического импульса. Поэтому задатчиком 8 угла поворота рулевых органов 3 в первый сумматор 9 вводится определенное количество импульсов Nз, которое соответствует заданному углу отклонения δ з рулевых органов 3. Этот сигнал в сумматоре 9 сравнивается с количеством импульсов Nδ , поступающим в первый сумматор 9 с датчика 7 угловой координаты рулевых органов 3, а результирующий сигнал на выходе сумматора 9 в виде количества импульсов Nвx=Nδ -Nз поступает на вход усилителя 11, который формирует соответствующий сигнал на шаговый электродвигатель 4 и счетчик импульсов 14. Электродвигатель отрабатывает равное Nвх количество шагов, а на выходе счетчика появляется сигнал в виде количества импульсов Nγ , пропорционального величине угла поворота γ вала шагового электродвигателя 4. Во втором сумматоре величина Nγ суммируется с величиной Nδ , так что в преобразователь 12 с выхода второго сумматора 9 поступает разница Nδ -Nγ , пропорциональная углу скручивания торсиона 6. В преобразователе 12 по этой величин в соответствии с зависимостью (3), аналогичной зависимостям (1) и (2), определяется величина действующего на рулевые органы шарнирного момента

где kδ - коэффициент передачи датчика 7, а kγ - угловой шаг вала шагового электродвигателя 4.
Таким образом, заявляемые способ и реализующие его устройства обеспечивают измерение шарнирного момента рулевых органов модели ЛА одновременно с измерениями аэродинамических сил и моментов модели на аэродинамических весах при дистанционном управлении угловым положением рулевых органов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Н.Я.Фабрикант. Аэродинамика. М.: Наука, 1964, с.223.
2. Там же, с.223-232.
3. Д.И.Агейкин, Е.Н.Костина, Н.Н.Кузнецова. Датчики контроля и регулирования. М.: Машиностроение, 1965, с.334.
4. Н.Я.Фабрикант. Аэродинамика. М.: Наука, 1964, с.233-234, рис.3.82.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И БЛОК РУЛЕВОГО ПРИВОДА (ВАРИАНТЫ) | 2005 |
|
RU2288439C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| РУЛЕВАЯ КОЛОНКА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И БЛОК УПРАВЛЕНИЯ РУЛЕВОЙ КОЛОНКОЙ | 2003 |
|
RU2254257C2 |
| ЭЛЕКТРОПРИВОД СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ | 2000 |
|
RU2185988C1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ В ЭЛЕКТРОМЕХАНИЧЕСКОМ УСИЛИТЕЛЕ РУЛЯ АВТОМОБИЛЯ | 2001 |
|
RU2210172C2 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2003 |
|
RU2244897C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ | 2002 |
|
RU2222773C1 |
Изобретение относится к экспериментальной аэродинамике. В заявляемом способе, включающем определение величины вращающего момента по углу скручивания торсиона, в процессе испытаний внутримодельным приводом с торсионом в кинематической передаче устанавливают угол отклонения рулевых органов и измеряют угол поворота выходного вала привода, а действующий на рулевые органы шарнирный момент определяют по зависимости М=с·(δ-γ), где М - действующий на рулевые органы шарнирный момент, с - жесткость торсиона, δ - угол отклонения рулевых органов, γ - угол поворота выходного вала привода. Заявляемые варианты устройства содержат размещенный в корпусе модели датчик деформаций с упругим элементом и преобразователем деформаций в электрический сигнал, электродвигатель поворота рулевых органов и блок управления с задатчиком угла поворота рулевых органов. Упругий элемент датчика деформаций выполнен в виде торсиона, а преобразователь деформаций в электрический сигнал - в виде датчиков и оси рулевых органов, кинематически связанной через выходной вал датчика деформаций с одним концом торсиона, другой конец которого через входной вал датчика деформаций жестко связан с валом электродвигателя. В отличие от первого варианта устройства, в котором все электрические сигналы представлены в аналоговом виде, во втором варианте устройства использованы функциональные элементы, связанные между собой цифровыми (импульсными) сигналами. Известная дискретность угла поворота шагового двигателя при отработке управляющего электрического импульса обеспечивает определение угла поворота его вала по числу управляющих импульсов, что позволяет заменить датчик угловой координаты вала шагового электродвигателя электронным счетчиком импульсов. Технический результат - снижение энергетических затрат при испытаниях моделей летательных аппаратов в аэродинамической трубе за счет совмещения измерений на аэродинамических весах с измерением шарнирного момента рулевых органов модели внутримодельным устройством при обеспечении дистанционного управления рулевыми органами модели. 3 н.п. ф-лы, 2 ил.
М=с·(δ-γ),
где М - действующий на рулевые органы шарнирный момент;
с - жесткость торсиона,
δ - угол отклонения рулевых органов,
γ - угол поворота выходного вала привода.
| АГЕЙКИН Д.И | |||
| и др | |||
| Датчики контроля и регулирования | |||
| - М.: Машиностроение, 1965, с.334 | |||
| ФАБРИКАНТ Н.Я | |||
| Аэродинамика | |||
| - М.: Наука, 1964, с.233 и 234, рис.3.82 | |||
| Приспособление для подъема рамы бороны | 1923 |
|
SU823A1 |
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Передвижной дровокольный станок | 1913 |
|
SU522A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

