Предлагаемые изобретения относятся к ракетной технике и могут быть использованы в управляемых снарядах и ракетах комплексов высокоточного оружия.
Известен способ управления ракетой с 4-мя аэродинамическими рулями, в котором один из рулей поддерживают в свободном состоянии по потоку или фиксируют под определенным углом. С помощью двух из оставшихся рулей обеспечивают движение вокруг осей тангажа, рыскания и крена, а последний руль фиксируют под нулевым углом (патент Японии №6033996, МПК F 42 B 15/00). При этом сформированный системой управления ракеты сигнал преобразуется рулевым приводом в соответствующее угловое отклонение двух рулей относительно продольной оси ракеты в диапазоне между двумя максимальными значениями. Величина максимального угла отклонения аэродинамического руля выбирается из условия обеспечения требуемой перегрузки управления при минимизации аэродинамической нагрузки на рулевой привод.
Наиболее близок к заявляемому способу по осуществлению и достигаемому эффекту принятый за прототип способ управления вращающимся снарядом (ракетой), в котором последовательным попарным раскрытием и приведением в действие противоположных относительно продольной оси снаряда аэродинамических рулей в моменты достижения снарядом заданной скорости полета обеспечивают его аэродинамическую устойчивость и управляемость в широком диапазоне изменения скорости полета (патент России №2166727, МПК F 42 B 15/01). Вместе с тем, как и в приведенном выше, в этом способе собственно управление снарядом осуществляется по сформированным его системой управления сигналам за счет отклонения аэродинамических рулей относительно продольной оси снаряда в диапазоне между двумя максимальными значениями.
Наиболее близок к первому варианту заявляемого устройства по конструкции и достигаемому эффекту блок рулевого привода управляемого снаряда, содержащий рулевую машину с закрепленным на оси аэродинамических рулей поршнем в виде коромысла, который установлен в корпусе, имеющем внутренние боковые стенки в виде сферических поверхностей и разделенном на рабочие камеры перегородкой, расположенной вдоль оси рулей, и имеющем заднюю стенку с отверстиями, сообщающими рабочие камеры с пневмораспределительным устройством (патент России №2066834, МПК F 42 B 15/00).
Наиболее близок ко второму варианту заявляемого устройства по конструкции и достигаемому эффекту электрогидравлический рулевой привод, содержащий усилитель с входным сумматором, рулевую машину с распределительным устройством и силовым гидроцилиндром, датчик обратной связи (Б.Г.Крымов, Л.В.Рабинович, В.Г.Стеблецов. Исполнительные устройства систем управления летательными аппаратами. Москва, Машиностроение, 1987, с.36, рис.2.3).
Известные способы управления предполагают наличие в реализующих эти способы устройствах механических ограничителей угла поворота аэродинамических рулей. В рассмотренных устройствах функции таких ограничителей выполняют задняя стенка корпуса рулевой машины (патент России №2066834, МПК F 42 B 15/00) и торцевые стенки гидроцилиндра (Б.Г.Крымов, Л.В.Рабинович, В.Г.Стеблецов. Исполнительные устройства систем управления летательными аппаратами. Москва, Машиностроение, 1987, с.36, рис.2.3).
Рулевой привод проектируется из условия обеспечения перемещения аэродинамических рулей с требуемым быстродействием для режима наибольшей аэродинамической нагрузки (т.е. для фиксированной точки траектории полета ракеты), в котором рулевой привод развивает наибольшую мощность. Поэтому в остальных режимах мощность рулевого привода остается не востребованной, а энергия рабочего тела рулевого привода при максимальной команде управления рассеивается при ударе поршня или рулей об упор, который, как правило, жестко связан с несущими корпусными деталями конструкции ракеты. Возникающие при этом вибрации отрицательно сказываются на работе бортовых приборов точной механики (гироприборы, датчики ускорений и т.д.).
Задача заявляемых изобретений - устранение вибрационной нагрузки на бортовые приборы системы управления ракеты при отработке рулевым приводом максимальных команд управления.
Решение этой задачи в способе управления ракетой, включающем формирование системой управления ракеты сигнала на рулевой привод и соответствующее угловое отклонение аэродинамических рулей приводом относительно продольной оси ракеты в диапазоне между двумя максимальными значениями, достигается тем, что в момент достижения аэродинамическими рулями максимального угла отклонения прекращают действие сигнала системы управления на рулевой привод, в котором формируют воздействие, обеспечивающее угловое отклонение аэродинамических рулей в противоположную сторону.
Заявляемый способ предполагает отсутствие в рулевом приводе механических упоров, ограничивающих угол поворота аэродинамических рулей. При отработке максимальных команд системы управления в момент достижения аэродинамическими рулями максимального угла отклонения (±δm) и отсутствия сигнала системы управления формирование воздействия, обеспечивающего угловое отклонение аэродинамических рулей в противоположную сторону, вызывает их торможение в диапазонах угловой координаты δ≥±δm. В результате отклонение аэродинамических рулей превышает координаты ±δm на угол δΔ, величина которого зависит от соотношения развиваемого рулевым приводом момента и моментов, создаваемых действующими на него инерционной и аэродинамической нагрузками. При достижении координаты δ=±(δm+δΔ) аэродинамические рули начинают обратное движение, а в момент прохождения координат δ=±δm на смену дополнительного воздействия на рулевой привод вновь приходит сигнал системы управления. Аналогично происходит торможение аэродинамических рулей и изменение направления их движения при δ=±(δm-δΔ). Таким образом осуществляются колебания аэродинамических рулей вблизи координат δ=±δm с амплитудой δΔ. При этом высокую частоту колебаний, величина которой на 1-2 порядка больше собственной частоты ракеты, определяет быстродействие рулевого привода, что обеспечивает не влияние колебаний аэродинамических рулей вблизи координат δ=±δm на процесс управления ракетой.
Решение поставленной задачи в первом варианте блока рулевого привода, содержащего рулевую машину с закрепленным на оси аэродинамических рулей поршнем в виде коромысла, который установлен в корпусе, разделенном расположенной вдоль оси рулей перегородкой на рабочие камеры, боковые стенки которых выполнены сферическими, а общая задняя стенка выполнена с отверстиями, сообщающими рабочие камеры с пневмораспределительным устройством, достигается тем, что у задней стенки выполнено поднутрение боковых стенок с образованием промежуточной полости. При этом расстояние от оси вращения аэродинамических рулей до задней стенки и протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении от задней стенки выполнены величиной

где L1 - расстояние от оси вращения аэродинамических рулей до задней стенки, L2 - протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении от задней стенки, R - радиус сферических поверхностей, δm - максимальный угол поворота аэродинамических рулей, δΔ - амплитуда автоколебаний механической системы "аэродинамические рули - поршень", h - толщина поршня. Протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении к задней стенке составляет величину

где L3 - протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении к задней стенке.
В прототипе (патент России №2066834, МПК F 42 B 15/00) функцию механического упора выполняет задняя стенка корпуса, которая ограничивает угол поворота (±δm) поршня, закрепленного на оси аэродинамических рулей.
В отличие от прототипа в первом варианте блока рулевого привода у задней стенки выполнено поднутрение боковых стенок с образованием промежуточной полости, увеличивающей возможный угол поворота аэродинамических рулей на величину не менее ±δΔ, что определяет зависимость (1) для расстояния L1. Протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении от задней стенки увеличена для обеспечения поворота поршня на угол ±(δm+δΔ) в пределах сферических поверхностей рабочих камер рулевой машины, что определяет зависимость (1) для расстояния L2. При этом протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении к задней стенке (L3) согласно зависимости (2) обеспечивает сообщение наполняемой рабочей камеры рулевой машины с промежуточной полостью при угле поворота поршня (или аэродинамических рулей) на угол δ>±δm. Следовательно, в первом варианте блока рулевого привода реализована возможность поворота аэродинамических рулей в диапазоне δ=±(δm+δΔ) без механического ограничения угла поворота.
Решение поставленной задачи во втором варианте блока рулевого привода, содержащего последовательно соединенные входной сумматор, усилитель, рулевую машину и датчик обратной связи, достигается тем, что в качестве датчика обратной связи использован датчик угла поворота рулей и в блок рулевого привода введен ограничитель напряжения положительной и отрицательной величин сигнала датчика обратной связи, два компаратора, аналоговый мультиплексор и формирователь максимальных команд управления. Выход датчика обратной связи соединен с входом ограничителя напряжения, выход которого соединен с первым управляющим входом и первым сигнальным входом аналогового мультиплексора и со входами компараторов, выходы которых соединены соответственно со вторым и третьим управляющими входами аналогового мультиплексора. Второй и третий сигнальные входы мультиплексора соединены с разнополярными выходами формирователя максимальных команд управления, а выход аналогового мультиплексора - со вторым входом сумматора.
В отличие от прототипа (Б.Г.Крымов, Л.В.Рабинович, В.Г.Стеблецов. Исполнительные устройства систем управления летательными аппаратами. Москва, Машиностроение, 1987, с.36, рис.2.3) во втором варианте блока рулевого привода вместо механических упоров поршня рулевой машины, функцию которых выполняют торцевые стенки гидроцилиндра, ограничение угла поворота аэродинамических рулей осуществляют включенные в цепь обратной связи рулевого привода ограничитель напряжения положительной и отрицательной величин сигнала датчика обратной связи, два компаратора, аналоговый мультиплексор и формирователь максимальных команд управления. Введенные элементы обеспечивают ограничение угла поворота аэродинамических рулей в диапазоне δ=±(δm+δΔ) по сигналу датчика обратной связи.
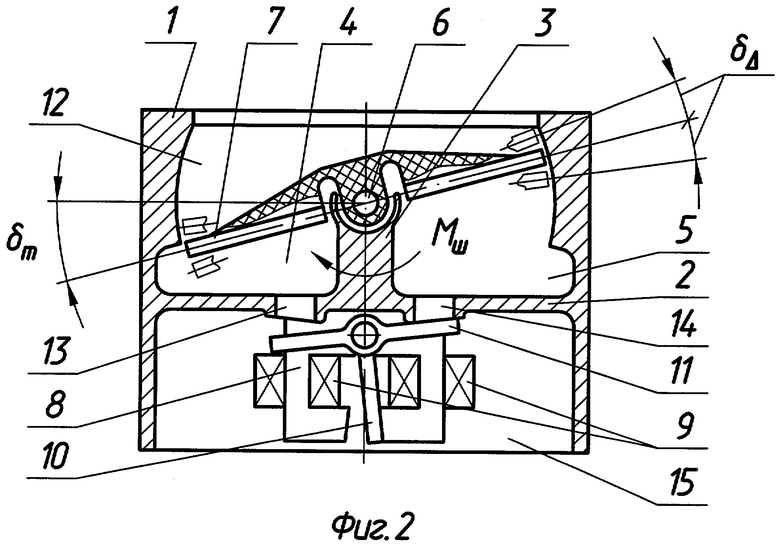
Конструкция первого варианта заявляемого устройства представлена на чертежах, где на фиг.1 и 2 приведен общий вид блока рулевого привода при нулевом (δ=0) и при максимальном (δ=δm и δ=δm±δΔ) отклонениях аэродинамических рулей.
В первом варианте устройства корпус 1 разделен задней стенкой 2 на два объема. В переднем объеме, разделенном перегородкой 3 на рабочие камеры 4 и 5 рулевой машины, на оси 6 аэродинамических рулей закреплен поршень 7, а в заднем объеме установлено распределительное устройство, состоящее из электромагнита 8 с обмотками 9 и поворотным якорем 10, на оси которого закреплена заслонка 11. Полость высокого давления 12 сообщена с рабочими камерами 4 и 5 по зазору между поршнем 7 и выполненными по сфере с радиусом R боковыми стенками корпуса 1. Рабочие камеры 4 и 5 сообщены соответственно каналами 13 и 14 с полостью низкого давления 15.
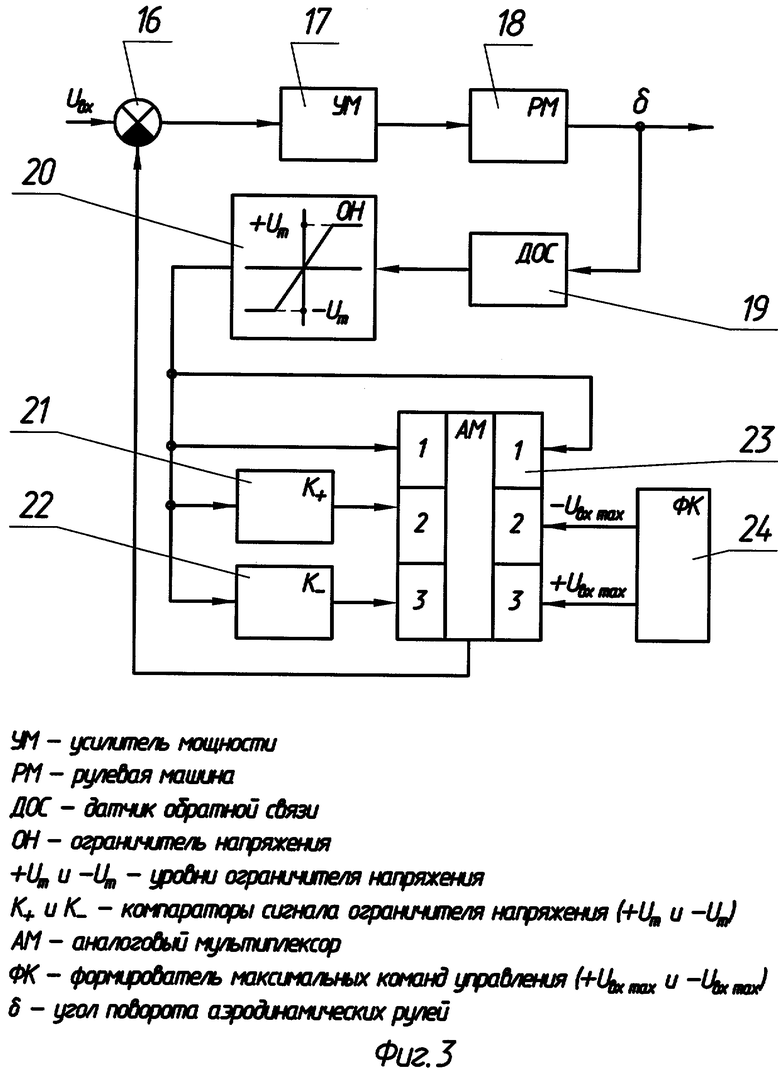
На фиг.3 представлена структурная схема второго варианта блока рулевого привода.
Второй вариант блока рулевого привода включает последовательно соединенные входной сумматор 16, усилитель 17, рулевую машину 18, датчик обратной связи 19, ограничитель напряжения 20 положительной и отрицательной величин сигнала датчика обратной связи 19, два компаратора 21 и 22, аналоговый мультиплексор 23 и формирователь максимальных команд управления 24. Выход датчика обратной связи 19 соединен с входом ограничителя напряжения 20, выход которого соединен с первым управляющим входом и первым сигнальным входом аналогового мультиплексора 23 и со входами компараторов 21 и 22, выходы которых соединены соответственно со вторым и третьим управляющими входами аналогового мультиплексора 23. Второй и третий сигнальные входы мультиплексора 23 соединены с разнополярными выходами формирователя максимальных команд управления 24, а выход аналогового мультиплексора 23 - со вторым входом сумматора 16.
Работа первого варианта устройства происходит следующим образом.
Рабочее тело - воздух из полости высокого давления 12 по зазорам между поршнем 7 и сферическими боковыми стенками поступает в рабочие камеры 4 и 5 рулевой машины, из которых по каналам 13 и 14 сбрасывается в полость низкого давления 15. Сигнал системы управления ракеты, поступающий на одну из обмоток 9 электромагнита 8, вызывает соответствующий поворот якоря 10 и заслонки 11, которая перекрывает один из каналов 13 или 14 (например, на фиг.2 заслонкой 11 перекрыт канал 14). В результате давление воздуха в рабочей камере 5 становится равным давлению воздуха в полости высокого давления 12, а в рабочей камере 4 давление воздуха становится близким к давлению в полости низкого давления 15. Из-за перепада давлений на поршень 7 в рабочей камере 4 возникает развиваемый рулевым приводом момент, под действием которого поршень 7 поворачивает ось 6 и аэродинамические рули на угол δ=δm, преодолевая действующий на аэродинамические рули пружинный шарнирный момент Мш. При дальнейшем повороте (δ>δm) поршень 7 перемещается в образованную у задней стенки 2 поднутрением сферических боковых стенок промежуточную полость, где значительно возрастает зазор между поршнем 7 и боковой стенкой корпуса 1 в месте ее поднутрения. Происходит выравнивание давлений воздуха в полости высокого давления 12 и рабочей камере 4 и, как следствие этого, резкое уменьшение развиваемого рулевым приводом момента. По инерции поршень достигает положения δ=δm+δΔ, в котором под действием аэродинамического шарнирного момента рулей начинает обратное движение. При δ=δm поршень выходит из промежуточной полости и наполнение рабочей камеры 4 вновь происходит по зазору между поршнем 7 и сферической боковой стенкой, что сопровождается возрастанием развиваемого рулевым приводом момента. Происходит торможение поршня 7 и изменение направления его движения при угле δ=δm-δΔ. Повторение описанного выше процесса вызывает автоколебания поршня 7 и аэродинамических рулей около координаты δ=δm, что определяют зависимости (1) и (2), с амплитудой δΔ, величина которой рассчитывается исходя из соотношения развиваемого рулевым приводом момента и моментов аэродинамической и инерционной нагрузки. Действие пружинного аэродинамического момента обеспечивает соответствующее положение оси вращения аэродинамических рулей.
Работа второго варианта устройства происходит следующим образом.
Уровни ограничения (+Um и -Um) ограничителя напряжения 20 настроены равными напряжениям датчика обратной связи 19, поступающими с него при углах отклонения аэродинамических рулей соответственно δ=+δm и δ=-δm. При этом напряжения срабатывания компараторов 21 и 22 также имеют величины соответственно +Um и -Um. Поэтому при достижении максимального угла поворота по сигналу ограничителя напряжения срабатывает один из компараторов 21 или 22. В зависимости от поступающих на управляющие входы сигналов аналоговый мультиплексор 23 коммутирует один из сигнальных входов с выходом по одному из трех возможных вариантов:
- в диапазоне изменения угла отклонения аэродинамических рулей -δm<δ<+δm с выхода аналогового мультиплексора 23 на сумматор 16 усилителя 17 поступает сигнал с датчика обратной связи 19, величина которого изменяется в пределах -Um<U<+Um, пропорционально углу отклонения аэродинамических рулей;
- при угле отклонения аэродинамических рулей δ≥+δm с выхода аналогового мультиплексора 23 на сумматор 16 усилителя 17 поступает сигнал -Uвх max формирователя команд 23, что обеспечивает торможение аэродинамических рулей при δ=+(δm+δΔ) и их движение в обратную сторону;
- при угле отклонения аэродинамических рулей δ≥-δm с выхода аналогового мультиплексора 23 на сумматор 16 усилителя 17 поступает сигнал +Uвх max формирователя команд 24, что обеспечивает торможение аэродинамических рулей при δ=-(δm+δΔ) и их движение в обратную сторону.
Такая логика работы мультиплексора 23 обеспечивает автоколебания аэродинамических рулей с амплитудой δΔ относительно координат δ=±δm при максимальных командах системы управления ракеты. При этом ограничение угла поворота аэродинамических рулей достигается логическим формированием сигнала управления на рулевую машину 18 без использования механических упоров.
В качестве ограничителя напряжения 20, компараторов 21 и 22, аналогового мультиплексора 23 могут быть использованы стандартные микросхемы (например, соответственно: линейный усилитель 140УД6 бКО.347.004ТУ4 с ограничением выходного сигнала, компаратор 521СА3 бКО.347.015ТУ2, аналоговый мультиплексор 564КП1 бКО.347.004ТУ2), а в качестве формирователя команд 24 - источники постоянного напряжения.
Таким образом, заявляемые способ управления ракетой и реализующие его варианты блока рулевого привода обеспечивают устранение вибрационной нагрузки на бортовые приборы системы управления ракеты за счет определенного логического формирования максимальных команд управления на рулевой привод.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 1998 |
|
RU2148780C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ С АЭРОДИНАМИЧЕСКИМИ РУЛЯМИ | 2000 |
|
RU2182306C2 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2179296C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2003 |
|
RU2244897C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2000 |
|
RU2177601C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
Группа изобретений относится к ракетной технике и может быть использована в управляемых снарядах и ракетах комплексов высокоточного оружия. Технический результат - устранение вибрационной нагрузки на бортовые приборы системы управления ракеты при отработке рулевым приводом максимальных команд управления. Способ управления ракетой включает формирование системой управления ракеты сигнала на рулевой привод и соответствующее угловое отклонение аэродинамических рулей приводом относительно продольной оси ракеты в диапазоне между двумя максимальными значениями. В момент достижения аэродинамическими рулями максимального угла отклонения прекращают действие сигнала системы управления на рулевой привод, в котором формируют воздействие, обеспечивающее угловое отклонение аэродинамических рулей в противоположную сторону. В первом варианте блок рулевого привода содержит рулевую машину с закрепленным на оси аэродинамических рулей поршнем в виде коромысла, который установлен в корпусе, разделенном расположенной вдоль оси рулей перегородкой на рабочие камеры, боковые стенки которых имеют сферические поверхности. Общая задняя стенка выполнена с отверстиями, сообщающими рабочие камеры с пневмораспределительным устройством. У задней стенки поднутрением боковых стенок образована промежуточная полость. При этом расстояние от оси вращения аэродинамических рулей до задней стенки и протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении от задней стенки выполнены величиной, определяемой из первого математического выражения. Протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении к задней стенке составляет величину, определяемую из второго математического выражения. Во втором варианте блок рулевого привода содержит последовательно соединенные входной сумматор, усилитель, рулевую машину и датчик обратной связи. В него введен ограничитель напряжения положительной и отрицательной величин сигнала датчика обратной связи, два компаратора, аналоговый мультиплексор и формирователь максимальных команд управления. 3 н.п. ф-лы, 3 ил.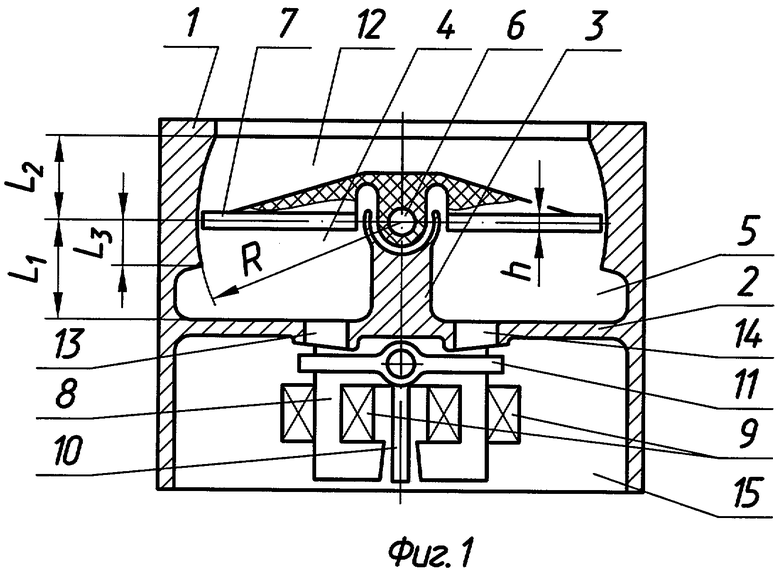
L1, L2>R·sin(δm+δΔ)+0,5·h,
где L1 - расстояние от оси вращения аэродинамических рулей до задней стенки;
L2 - протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении от задней стенки;
R - радиус сферических поверхностей;
δm - максимальный угол поворота аэродинамических рулей;
δΔ - амплитуда автоколебаний механической системы "аэродинамические рули - поршень";
h - толщина поршня,
а протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении к задней стенке составляет величину
L3=R·sin δm-0,5·h·cos δm,
где L3 - протяженность сферических поверхностей от оси вращения аэродинамических рулей в направлении к задней стенке.
| RU 21667277 C1, 10.05.2001 | |||
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1994 |
|
RU2066834C1 |
| КРЫМОВ Б.Г | |||
| и др | |||
| исполнительные устройства систем управления летательными аппаратами | |||
| - М.: Машиностроение, 1987, с.36, рис.2.3 | |||
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |

