Область техники
Изобретение относится к вращающимся снарядам и реактивным снарядам с аэродинамическими поверхностями, в частности к рулевым приводам. Изобретение преимущественно предназначено для использования в снарядах ствольной артиллерии, т.е. в тех снарядах или реактивных снарядах, которые испытывают значительные стартовые перегрузки.
Уровень техники
Известен рулевой привод ракеты по патенту GB 1187035, В 64 С 5/12, 08.04.1970, в котором для поворота рулей управления используются электромоторы, связанные с рулями посредством зубчатого редуктора.
Недостатком этого рулевого привода является его низкое быстродействие и возможность использования только на реактивных снарядах, ракетах с малой скоростью вращения.
Известна ракета ПЗРК "Игла" (9К38), см. Техническое описание и инструкция по эксплуатации 9К38 ТО. М.: Воениздат, 1987.
Известная вращающаяся самонаводящаяся ракета содержит двигатель, складывающийся хвостовой стабилизатор с установленными под углом к набегающему потоку аэродинамическими плоскостями, аппаратурный отсек, в котором размещен одноканальный релейный силовой привод с аэродинамическими и газодинамическими органами управления, формирователь команд для разворота ракеты на начальном участке полета (ФКР) и датчик схода ракеты, при этом катушка коррекции подключена к цепи, содержащей последовательно соединенные полосовой фильтр, нелинейное корректирующее устройство и первый сумматор, а также последовательно соединенные фазовый детектор, режекторный фильтр и второй сумматор, причем ко второму входу фазового детектора подключен генератор опорного напряжения, а ко второму и третьему входам второго сумматора соответственно датчик угловой скорости ракеты и генератор сигналов линеаризации. При этом выход второго сумматора через релейный усилитель мощности подключен к релейному силовому приводу.
Ракеты данного класса реализуют метод пропорционального наведения, характеризующийся достаточно быстрым (в течение 2,0-2,5 с) выводом на установившийся участок наведения с последующим полетом в упрежденную точку встречи, при котором угловая скорость линии визирования "ракета-цель" близка к нулевому значению и команды управления невелики, а следовательно, невелики и потребные перегрузки ракеты. Однако, так как рулевой привод ракеты функционирует в релейном режиме, аэродинамические рули независимо от величины подаваемых команд управления все равно всегда отклоняются на максимальный угол. В результате сила лобового сопротивления на рулях также всегда максимальна. Как следствие, теряется дальность полета ракеты, уменьшаются размеры зон пуска и максимальная дальность поражения целей.
По той же причине подъемная сила на рулях независимо от величины команд управления также всегда максимальна. Как функция времени она представляет собой прямоугольную знакопеременную волну различной (за счет сигнала линеаризации) длительности, характеризующуюся широким спектром воздействующих частот. В результате на ракету в течение всего времени полета воздействует широкий спектр вибрационных возмущений максимальной амплитуды. Последнее приводит к формированию максимальных для данной конструкции уровней виброшумов в сигнале управления на протяжении всего времени полета ракеты. Следствием этого является снижение точностных характеристик ракеты и эффективности комплекса.
Ракета имеет крылья малого удлинения, что определяется конструктивно из-за необходимости складывания их в пусковой трубе малого диаметра. Поэтому ракета на начальном участке полета имеет область неустойчивости на малых углах атаки до 3-4 град., при балансировочных углах атаки 5-6 град. При стрельбе по малоскоростным целям (вертолеты, турбовинтовые летательные аппараты) уровень начальных команд управления невелик, а потому малы и потребные значения перегрузок ракеты. Соответствующие этим значениям перегрузки углы атаки заведомо ниже тех, при которых обеспечивается устойчивость ракеты. Так как при старте на ракету всегда действуют случайные возмущающие моменты, то ракета под их действием будет всегда выходить на углы атаки не менее тех, при которых она устойчива (даже, если потребные углы атаки меньше необходимых для устойчивости). Вследствие этого увеличивается разброс возможных траекторных параметров, повышается вероятность "врезания" ракеты в землю, сужаются зоны пуска и поражения ракеты при стрельбе по малоскоростным целям. Кроме того, электропривод ракеты не обеспечивает достаточного быстродействия в условиях больших стартовых перегрузок.
Известна вращающаяся ракета по патенту RU 2216707, F 42 B 15/00, 20.11.2003, которая содержит двигатель, складывающийся хвостовой стабилизатор с установленными под углом к набегающему потоку аэродинамическими плоскостями, аппаратурный отсек, в котором размещен одноканальный силовой привод с аэродинамическими и газодинамическими органами управления, датчик схода ракеты, формирователь команд для разворота ракеты на начальном участке полета, при этом катушка коррекции подключена к цепи, содержащей последовательно соединенные полосовой фильтр, нелинейное корректирующее устройство и первый сумматор, а также последовательно соединенные фазовый детектор, режекторный фильтр и второй сумматор, причем ко второму входу фазового детектора подключен генератор опорного напряжения, а ко второму входу второго сумматора - датчик угловой скорости ракеты, силовой привод выполнен в виде следящего электропривода, выходы первого и второго сумматоров подключены соответственно к управляемому входу фазового детектора и к входу следящего электропривода через ограничители зоны линейности. Формирователь команд выполнен в виде подключенных к катушке пеленга первой последовательной ветви, состоящей из первого и второго управляемых ключей, третьего сумматора, подключенного ко второму входу первого сумматора, и второй последовательной ветви, состоящей из амплитудного детектора, фильтра низких частот, компаратора с заданным пороговым значением и бистабильного элемента с заданным исходным состоянием, при этом к выходу первого ключа подключен третий управляемый ключ, выход которого соединен со вторым входом третьего сумматора, а управляющий вход - с выходом бистабильного элемента, выход компаратора подключен к управляющему входу второго управляемого ключа, а к управляющему входу первого управляемого ключа подключено реле времени, вход которого соединен с датчиком схода ракеты.
Следящий электропривод образует замкнутый контур регулирования, содержащий последовательно соединенные четвертый сумматор, первый вход которого является входом привода, дифференцирующее корректирующее устройство, релейный усилитель мощности и электродвигатель, вал которого соединен с потенциометром обратной связи, подключенным ко второму входу четвертого сумматора, и через редуктор - с органами управления ракеты.
В известной ракете частично устранены недостатки указанного выше аналога за счет использования линейного рулевого привода, который позволяет отклонять рули управления на величины углов, пропорциональные амплитуде сигнала управления. Однако данный электропривод может использоваться на реактивных снарядах и ракетах со скоростью вращения по крену не более 10-60 град/с. Электропривод обеспечивает максимальную скорость отклонения руля не более 120 град/с. При такой скорости отклонения руля привод может отрабатывать входной сигнал при максимальном угле отклонения руля δmax=20° без амплитудных и фазовых искажений на частоте не более
Применение этих электроприводов на управляемых ракетах и снарядах, вращающихся по крену со скоростью 3-5 Гц и более, невозможно.
Наиболее близким аналогом заявленного изобретения является ракета с электрическим рулевым приводом «Стрела» (9К35) (см. Техническое описание и инструкция по эксплуатации 9М37М ТО, М.: Воениздат, 1980).
Известная вращающаяся самонаводящаяся ракета содержит аппаратурный отсек, в котором размещен двухканальный электропривод, связанный с аэродинамическими плоскостями, и блок электроники. Каждая рулевая машина, состоящая из электродвигателя, редуктора и потенциометра обратной связи, управляет двумя рулями, насаженными на выходной вал рулевой машины, который соединен с оконечной шестерней понижающего редуктора. Электродвигатель является двухполюсной электрической машиной постоянного тока с возбуждением от постоянных магнитов. Блок электроники предназначен для формирования режимов стрельбы, фильтрации управляющих сигналов, их деления в соответствующем отношении и усиления по мощности, необходимой для работы электродвигателей. Такой электропривод обеспечивает максимальную скорость отклонения руля не более 120 град/с и может использоваться на реактивных снарядах и ракетах со скоростью вращения по крену не более 10-60 град/с.
Для использования такого электропривода в составе снаряда или ракеты вводится дополнительный канал крена, ограничивающий угловую скорость вращения по крену. В корпусе блока крена закреплены две рамки с роторами, имеющими лопатки на ободе. Рамки связаны между собой рычагами таким образом, что поворот одной рамки приводит к повороту другой на такой же угол, но в противоположную сторону. При крене ракеты роторы в соответствии с гироскопическим эффектом удерживают элероны в исходном положении. Создается аэродинамический момент, который ограничивает угловую скорость вращения ракеты. Разгон роторов осуществляется от порохового аккумулятора давления.
Известной ракете присущи те же недостатки, что ракете по патенту RU 2216707.
Раскрытие изобретения
Задачей изобретения является обеспечение возможности использования электропривода на снарядах и малогабаритных ракетах, вращающихся по крену со скоростью до 20=30 Гц и испытывающих значительные стартовые перегрузки, в частности на снарядах и ракетах, предназначенных для использования в ствольной артиллерии.
Техническим результатом изобретения является улучшение динамических характеристик снаряда или ракеты.
Сущность изобретения заключается в том, что вращающийся снаряд с электрическим рулевым приводом содержит электродвигатель, редуктор, формирователь команд, электронный усилитель мощности, потенциометр обратной связи, корректирующую цепь обратной связи и рули управления, при этом ротор электродвигателя установлен в статоре с возможностью удерживания посредством магнитных сил в одном из своих крайних положений, перемещения на величину демпфирования относительно статора и взаимодействия в другом своем крайнем положении с дополнительно введенными регулируемыми опорами, закрепленными на корпусе электродвигателя.
В частных случаях выполнения изобретение характеризуется следующими признаками.
Электрический рулевой привод выполнен линейным, при этом формирователь команд связан с прямым входом электронного усилителя мощности, выход которого связан с электродвигателем, выходной вал которого соединен с входным валом редуктора, а выходной вал последнего соединен с рулями управления и осью потенциометра обратной связи, выход которого связан с входом корректирующей цепи обратной связи, выход которой связан с инвертирующим входом электронного усилителя мощности.
Электродвигатель имеет пусковой момент 1000-1500 г·см и скорость холостого хода 8000-10000 об/мин.
Редуктор электродвигателя выполнен с коэффициентом редукции q, удовлетворяющим неравенству:
 где
где
nxx - скорость холостого хода электродвигателя (об/мин);
fx - скорость вращения снаряда по крену (Гц);
δmax - максимальный угол отклонения руля (град);
Мш max - максимальный шарнирный момент (г·см);
Мn - пусковой момент электродвигателя (г·см).
Электронный усилитель мощности имеет коэффициент усиления Ку, определяемый из следующего соотношения:
 где
где
Un - максимальное напряжение питания электродвигателя;
Uвх max - максимальный входной сигнал управления;
δлин - линейная зона отклонения руля, определяемая из соотношения:
δлин=(0,05-0,1)δmax.
Краткое описание чертежей
На фиг.1 изображен общий вид снаряда или ракеты;
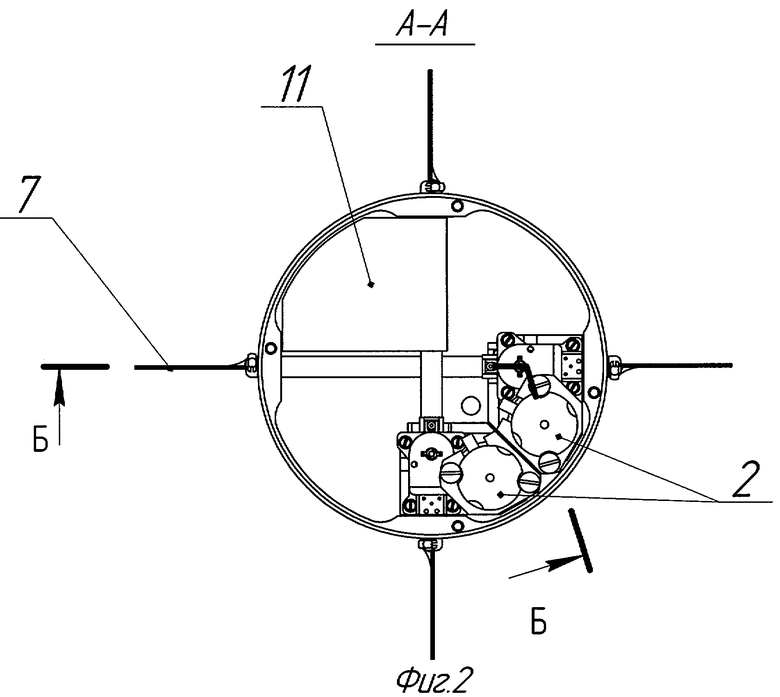
на фиг.2 - разрез А-А на фиг.1;
на фиг.3 - электропривод в разрезе Б-Б на фиг.2.
Осуществление изобретения
Вращающийся снаряд 1 содержит линейный рулевой электропривод, выполненный в виде электродвигателя 2, выходной вал 3 которого связан с входным валом 4 редуктора 5. Выходной вал 6 редуктора 5 связан с рулями управления 7 и осью 8 потенциометра обратной связи 9. В блоке электроники расположен формирователь команд 10, который связан с прямым входом электронного усилителя мощности 11. Выход потенциометра обратной связи 9 связан с входом корректирующей цепи обратной связи электронного усилителя 11. Ротор 12 электродвигателя 2 установлен в статоре 13 с возможностью удерживания посредством магнитных сил в нижнем положении. Источник магнитного поля может располагаться в верхней части - у основания. В первом случае ротор 12 будет удерживаться в верхнем положении за счет сил притяжения, а во втором - за счет сил отталкивания. Ротор 12 во время стартовых перегрузок перемещается на величину демпфирования относительно статора 13. В момент максимального значения сил перегрузки ротор 12, преодолевая магнитные силы, смещается относительно статора 13 и взаимодействует в другом своем крайнем положении с регулируемыми опорами 14, которые закреплены на основании 15 корпуса электродвигателя 2. Основание 15 ориентировано преимущественно в сторону хвостовой части снаряда или ракеты 1. Такое выполнение электродвигателя повышает его быстродействие и обеспечивает минимально возможное запаздывание при отработке знакопеременного входного сигнала в заданном диапазоне частот.
Электродвигатель 2 может иметь следующие габаритные размеры: диаметр - не более 25 мм, длина - не более 50 мм. При таких размерах электродвигатель создает пусковой момент более 1000 г·см и развивает скорость холостого хода 7000-7400 об/мин.
В зависимости от условий применения в электроприводе используется редуктор с цилиндрическими или коническими зубчатыми колесами. Коэффициент редукции q редуктора 5 должен удовлетворять следующему условию:
где
nxx - скорость холостого хода электродвигателя (об/мин);
fx - скорость вращения снаряда по крену (Гц);
δmax - максимальный угол отклонения руля (град);
Мш max - максимальный шарнирный момент (г·см);
Мn - пусковой момент электродвигателя (г·см).
Левая часть неравенства обеспечивает необходимую максимальную скорость отклонения руля, а правая часть - преодоление максимального шарнирного момента.
Коэффициент обратной связи электропривода Ку, являющийся произведением коэффициентов передачи потенциометра обратной связи и корректирующей цепи обратной связи, принимается равным
где
Un - максимальное напряжение питания электродвигателя;
Uвх max - максимальный входной сигнал управления;
δлин - линейная зона отклонения руля, определяемая из соотношения:
δлин=(0,05-0,1)δmax.
Постоянная времени Тос форсирующего звена корректирующей цепи обратной связи должна быть равна 1-3 мс. При этом условии коэффициент относительного демпфирования электропривода ξ=0,5-0,7, что обеспечивает наилучшее качество отработки входных сигналов.
Электропривод имеет линейную зону δлин отклонения руля. Величиной этой зоны определяется коэффициент усиления Ку электронного усилителя мощности в соответствии с приведенной выше формулой.
Рулевой электропривод работает следующим образом.
Входной сигнал управления Uвх подается на прямой вход электронного усилителя мощности 11. С выхода электронного усилителя мощности 11 сигнал подается на вход электродвигателя 2, который начинает вращаться. Выходной вал 3 электродвигателя 2, соединенный с входным валом 4, вращает редуктор 5. Выходной вал 6 редуктора 5 поворачивает рули управления 7 и ось потенциометра обратной связи 9 на угол δ. С токосъемника потенциометра обратной связи 9 снимается сигнал Uб, который поступает на вход корректирующей цепи обратной связи. На выходе корректирующей цепи обратной связи появляется сигнал Uoc, который поступает на инвертирующий вход электронного усилителя мощности 11. При вращении выходного вала 3 электродвигателя 2 под действием сигнала электронного усилителя мощности 11 увеличивается угол δ отклонения рулей управления 7, соответственно увеличиваются сигналы Uб и Uoc. Когда величина сигнала Uoc достигнет величины сигнала Uвх, сигнал на выходе электронного усилителя мощности 11 обнуляется. В результате выходной вал 3 электродвигателя 2 прекращает вращение и рули управления остаются отклоненными на угол δ, пропорциональный поданному входному сигналу Uвх.
Предложенный рулевой привод может использоваться в снарядах и ракетах различного класса, в том числе выстреливаемых из ствола артиллерийского орудия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373479C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ ОЦЕНКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ЦЕПИ ПОТЕНЦИОМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236668C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
Изобретение относится к области вооружения. Вращающийся снаряд (1) с электрическим рулевым приводом содержит электродвигатель (2), редуктор (5), формирователь команд (10), электронный усилитель мощности (11), потенциометр обратной связи (9), корректирующую цепь обратной связи и рули управления (7). Ротор (12) электродвигателя (2) установлен в статоре (13) с возможностью удерживания посредством магнитных сил в одном из своих крайних положений, перемещения на величину демпфирования относительно статора (13) и взаимодействия в другом своем крайнем положении с дополнительно введенными регулируемыми опорами (14), закрепленными на корпусе (15) электродвигателя (2). При использовании изобретения улучшаются динамические характеристики снаряда. 4 з.п. ф-лы, 3 ил.
где nхх - скорость холостого хода электродвигателя (об/мин);
fx - скорость вращения снаряда по крену (Гц);
δmax - максимальный угол отклонения руля (град);
Мш max - максимальный шарнирный момент (г·см);
Mn - пусковой момент электродвигателя (г·см).
где Un - максимальное напряжение питания электродвигателя (В);
uвх max - максимальный входной сигнал управления (В);
δлин - линейная зона отклонения руля, определяемая из соотношения (град)
δлин=(0,05-0,1)δmax.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| US 4600166 А, 15.07.1986 | |||
| WO 2004076961, 10.09.2004 | |||
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ГЕОДЕЗИЧЕСКОГО ЗНАКА | 1994 |
|
RU2083953C1 |

