Изобретение относится к области авиастроения, в частности к замкнутым контурам управления движения летательных аппаратов.
Известны системы управления боковым и продольным движением летательных аппаратов, описание которых приведены в книге [1] В.А.Боднера "Теория автоматического управления полетом", М., 1964 г., стр. 178, 194, в книге [2] И. А.Михалева и др. "Системы автоматического управления самолетом". М.: Машиностроение, 1976 г. , стр. 259, 394, в книге [3] Г.И.Загайнова, Ю.П.Гуськов "Управление полетом самолетом". М.: Машиностроение, 1980 г., стр. 161 - 172.
Наиболее близким аналогом принимается система, описанная в книге [3] на стр. 161 - 163, структурная схема которой приведена на стр. 161 (рис. 6.2.1. б). Эта система содержит блок алгебраического суммирования БАС, контур стабилизации КС, блок информационных датчиков БИД. При заданном сигнале отклонения x3, в БАС на вход которого поступает сигнал текущей координаты x=x(t) с первого выхода БИД, формируется сигнал (x3-x), который с выхода БАС поступает на вход КС, имеющего передаточную функцию ([3], стр. 162, зависимость (6.2.2) при постоянных времени T1, T2, T3, T4:
(x3-x)(T4 4p4+T3 3 p3+T2 2p2+T1p)-1=x,
здесь p-оператор дифференцирования, координата x=x(t) измеряется БИД.
В замкнутом контуре
или
тогда при x3=const и параметрах Ti i, обеспечивающих устойчивость и качество управления, x--->x3, однако, при изменяющемся во времени x3(t), например x3= A0+A1•t, имеет место погрешность управления δx _→ A1•T1, что при A1=50 м/с, T1= с составляет δx = 25 м.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является повышение точности работы системы.
Обеспечивается технический результат тем, что в систему автоматического управления полетом летательного аппарата, содержащую последовательно соединенные блок алгебраического суммирования и контур стабилизации, а также блок информационных датчиков, первый выход которого подключен к первому входу блока алгебраического суммирования, причем на третий вход контура стабилизации подключен пятый выход блока информационных датчиков, дополнительно введены последовательно соединенные по первому,...,n-ому входам-выходам, блок формирования заданного сигнала управления и блок формирования заданных параметров движения, на третий вход которого подключен шестой выход блока информационных датчиков, седьмой выход которого подключен к (n+1)-ному входу блока формирования заданного сигнала управления, выход которого подключен к пятому входу блока алгебраического суммирования.
На чертеже представлена блок-схема предлагаемой системы, где:
1 - блок алгебраического суммирования БАС,
2 - контур стабилизации КС,
3 - блок информационных датчиков БИД,
4 - блок формирования заданного сигнала управления БФЗСУ,
5 - блок формирования заданных параметров движения БФЗПД.
Пунктирной линией обозначена естественная связь КС 2 с БИД 3.
Система работает следующим образом.
БИД 3 (см. , например, [4] И.И.Помыкаев и др. "Навигационные приборы и устройства", М. : Машиностроение, 1983 г. , стр. 403) измеряет параметры движения летательного аппарата:
- сигнал текущей координаты во времени t x=x(t), который с первого выхода БИД 3 поступает на первый вход БАС 1;
- параметры стабилизации (углы и угловые скорости), которые с пятого выхода (например, в последовательном коде) БИД 3 поступают на третий вход КС 2;
- сигнал продольной координаты y=y(t), который с шестого выхода БИД 3 поступает на третий вход БФЗПД 5,
- сигнал продольной скорости движения  который с седьмого выхода БИД 3 поступает на (n+1)-ный вход БФЗСУ 4.
который с седьмого выхода БИД 3 поступает на (n+1)-ный вход БФЗСУ 4.
БФЗПД 5 по техническому исполнению является арифметическим устройством ([5] , Л.Н.Преснухин, П.В.Нестеров "Цифровые вычислительные машины", М.: Высшая школа, 1981 г., стр. 16, 17), выполняющим операции запоминания, суммирования, вычитания, умножения, деления.
В оперативном запоминающем устройстве (ОЗУ) БФЗПД 5 заполнены координаты опорных точек заданной траектории x1, y1, x2, y2,...,xк, yк.
Затем в БФЗПД 5 при представлении заданной траектории в виде степенного ряда x3(y)=a0+a1y+...+amym=f1
- посредством вычислительной процедуры интерполяции (см., например, [6] И. Н. Бронштейн, К.А. Семендяев "Справочник по математике", М.: Наука, 1986 г. , стр. 502 - 504) на операциях разности, умножения, деления, суммирования формируются коэффициенты интерполяционного многочлена степени m≤(K+I):
a0(x1,y1,...,xк,yк), a1(x1,y1,...,xк,yк),...,
am=(x1,y1,...,xк,yк)
- посредством операций умножения (возведения в степень) и сложения формируется степенной интерполяционный многочлен f1 координат заданной траектории и ее параметрические производные f2,...,f(m+1):
f1=a0+a1y+a2y2+...+ amym,
Параметры f1, ...,fn)n≤m+1) с первого,..., n-20 выходов БФЗПД 5, например, в последовательном коде выдаются потребителям (например, в систему индикации) и поступают на первый, ..., n-ый входы БФЗСУ 4, на (n+1)-ный вход которого поступает сигнал продольной скорости движения  с седьмого выхода БИД 3.
с седьмого выхода БИД 3.
Производные интерполяционного многочлена "f1" по времени имеют вид:

так как вторая и высшие производные f1 по времени рассчитываются на каждом расчетном шаге с  то
то  тогда
тогда
В БФЗСУ 4 по техническому исполнению, являющемуся арифметическим устройством (см. [5] , стр. 16, стр. 315 - 320), на операциях умножения (возведение в степень) и сложения при (n-1)=i и постоянных известных коэффициентах C1,...,Ci формируется сигнал заданного управления
который с выхода БФЗСУ 4 поступает на пятый вход БАС 1, в котором формируется сигнал (x3y-x), поступающий на первый вход КС 2, являющегося контуром стабилизации летательного аппарата, застабилизированного по углам и угловым скоростям, поступающим на третий вход КС 2 с пятого выхода БИД 3. КС 2 имеет передаточную функцию ([3], стр. 162, зависимость (6.2.2))
(x3y-x)=x(T1p+T2 2p2+ T3 3p3+T4 4p4),
соответственно в замкнутом контуре при i=4

т. е. текущие координаты отслеживают заданные без погрешностей, присущих наиболее близкому аналогу, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1996 |
|
RU2093420C1 |
| СИСТЕМА УПРАВЛЕНИЯ КАТАПУЛЬТИРУЕМЫМ КРЕСЛОМ СПАСЕНИЯ ЭКИПАЖА | 1998 |
|
RU2144888C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1998 |
|
RU2145720C1 |
Изобретение относится к области авиационных систем, обеспечивающих управление и наведение летательных аппаратов. Технический результат заключается в повышении точности работы системы. Система содержит блок алгебраического суммирования, контур стабилизации, блок информационных датчиков, блок формирования заданных параметров движения, формирующий заданные траектории движения и их параметрические производные, и блок формирования заданных сигналов управления, обеспечивающие в замкнутом контуре управления точное движение по заданным пространственно-временным траекториям. 1 ил.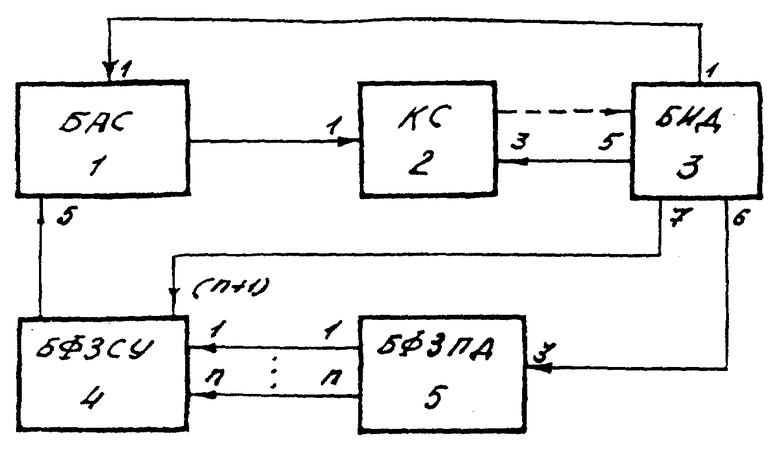
Система автоматического управления полетом летательного аппарата, содержащая последовательно соединенные блок алгебраического суммирования и контур стабилизации, а также блок информационных датчиков, первый выход которого подключен соответственно к первому входу блока алгебраического суммирования, причем на третий вход контура стабилизации подключен пятый выход блока информационных датчиков, отличающаяся тем, что в нее дополнительно введены последовательно соединенные по первому, ..., n-му входам - выходам блок формирования заданного сигнала управления и блок формирования заданных параметров движения, на третий вход которого подключен шестой выход блока информационных датчиков, седьмой выход которого подключен к (n+1)-му входу блока формирования заданного сигнала управления, выход которого подключен к пятому входу блока алгебраического суммирования.
| Загайнов Г.И | |||
| и др | |||
| Управление полетом самолетов | |||
| - М.: Машиностроение, 1980, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетов | |||
| - М.: Машиностроение, 1976, с.394 | |||
| Болднер В.А.Теория автоматического управления полетом | |||
| - М.: Наука, 1964, с.194. | |||

