Изобретение относится к обработке изображений и может быть использовано при межкадровой обработке в системах автоматического обнаружения, слежения, распознавания и др.
Аналогом изобретения является способ получения изображения объекта, отселектированного от фона, основанный на межкадровом вычитании изображений [1, стр.111-112]. Здесь одно из изображений последовательности изображений (кадров), представляющих данную сцену, записывают (и перезаписывают) в оперативную память в качестве опорного. Опорное и последующие текущие изображения (кадры) вычитают. При отсутствии изменений в сцене выходное изображение равно 0 (темное поле). При появлении в кадре нового объекта разностные сигналы в области его определения будут отличны от нуля и на выходе получают изображение данного объекта, отселектированное от фона, а неизменная часть кадра (фон) остается равной нулю.
Данный способ имеет ряд существенных недостатков, среди которых низкая обнаружительная способность, так как при вычитании используется фактически один признак - разность яркостей “фон-объект” в каждой точке; повышенная чувствительность к пространственной нестабильности фона и системы, так как при сдвигах координатное соответствие вычитаемых точек нарушается и кадр зашумляется.
Аналогом-прототипом является способ межкадровой корреляционной обработки изображений объектов, при котором после проведения предобработки, представленной временной последовательности изображений сцены, на которой возможно появление объекта, запоминания опорных, характеризующих изображение сцены сигналов (причем в качестве опорного записывают одно из изображений указанной последовательности), а для опорного и последующих текущих изображений вычисляют взаимно-корреляционную функцию (ВКФ), амплитуда которой определяет меру сходства опорного и данного текущего изображений. Максимальную амплитуду имеет автокорреляционная функция (АКФ), то есть корреляция опорного изображения с самим собой или ближайшим во времени текущим изображением. При изменении обстановки в кадре амплитуда корреляционной функции падает, что говорит о появлении, например, нового объекта в кадре (обнаружение).
Этот способ обладает высокой обнаружительной способностью (основной признак - образ объекта) и инвариантностью к сдвигам [2, 4, стр.84, 112-119].
Недостатками способа являются отсутствие какой-либо информации об обнаруженном объекте и его параметрах, так как обнаружение осуществляется за счет падения амплитуды корреляционного сигнала, что говорит только об изменении обстановки; невозможность определения координат объекта, так как опорный корреляционный сигнал “привязан” к центру кадра. При сдвигах объекта от него отделяется частный сигнал, соответствующий объекту, и смещается в направлении движения объекта независимо от его начального положения. То есть, информации о координатах объекта в каждый момент времени нет.
Эти недостатки ограничивают возможности применения корреляционного способа в задачах обнаружения, слежения и др.
Предлагаемое изобретение решает задачу обнаружения, слежения и получения изображения объекта.
Сущность изобретения состоит в том, что в известном способе межкадровой корреляционной обработки, включающем предобработку сигналов представленной временной последовательности изображений сцены, на которой возможно появление объекта, запоминание опорных, характеризующих изображение сцены сигналов, вычисление взаимно-корреляционной функции между сигналами опорного и текущих изображений, измерение параметров взаимно-корреляционной функции, после предобработки, например, оконтуривания, каждое представленное в оптическом или видеосигнальном виде, например, в виде телевизионного сигнала, изображение рассматриваемой последовательности изображений разделяют на фрагменты и вычисляют взаимно-корреляционную функцию для соответствующих фрагментов опорного и текущих изображений, после чего измеряют параметры взаимно-корреляционной функции, например, измеряют среднюю и максимальную величины амплитуды сигнала взаимно-корреляционной функции и сравнивают их, например, вычитают из максимальной величины амплитуды сигнала взаимно-корреляционной функции среднее значение величины амплитуды, полученный разностный сигнал сравнивают с заданной пороговой величиной сигнала, а затем формируют управляющие сигналы, с помощью которых осуществляют фрагментарную фильтрацию временной последовательности текущих изображений, причем для фрагментов, разностные сигналы которых превышают пороговое значение, формируют управляющие сигналы, блокирующие сигналы изображения, а для фрагментов, разностные сигналы которых меньше или равны пороговому значению, формируют управляющие сигналы, пропускающие сигналы соответствующих фрагментов.
Кроме того, фрагменты изображения выбирают одинаковыми по конфигурации и равными по площади с размерностью К пикселей, где 2≤ K≤ N, причем N - число пикселей в изображении, а также фрагменты изображений выбирают различными по конфигурации и по площади, с размерностью k1 пикселей на каждом фрагменте, где K1=2,... ni1, ni≤N/2, причем N - число пикселей в изображении. Кроме того, на фрагменты разделяют либо опорное, либо текущее изображения. Сигналы, принадлежащие, выделенному изображению объекта, записывают в качестве опорного изображения. При высоких контрастах “фон-объект” из сигналов взаимно-корреляционной функции для фрагментов предыдущего кадра вычитают сигналы взаимно-корреляционной функции соответствующих фрагментов последующих кадров.
Данный способ обнаружения и получения изображения объекта полностью устраняет недостатки прототипа и обеспечивает возможность восстановления изображения объекта по параметрам взаимно-корреляционной функции при межкадровой обработке и в ряде других задач; получения полной информации о координатах и перемещениях объекта в каждый момент времени, что достигается записью полученного изображения объекта в качестве опорного эталона-образа и вычисления его автокорреляционной функции (т.е., режим распознавания заданного объекта); измерения параметров объекта и сцены путем подсчета числа фрагментов, приходящихся на изображение объекта и заданных участков сцены и т.д.
Указанные преимущества расширяют возможности корреляционной межкадровой обработки с оперативной записью текущих изображений в качестве опорных.
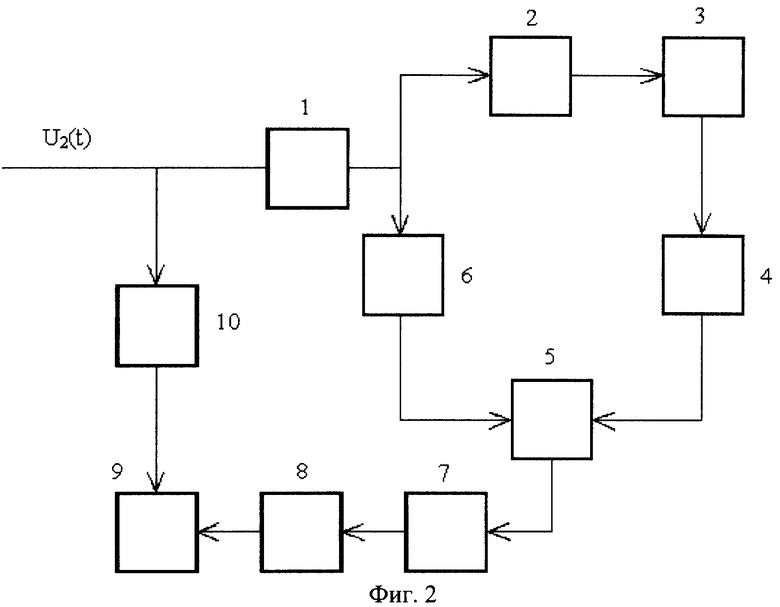
На фиг.1 (а-з) показаны результаты обнаружения и выделения объектов предлагаемым способом для малоконтрастного изображения.
При этом на фиг.1а и 16 показаны соответственно фоно-целевая обстановка до и при появлении объектов соответственно, при этом на фиг.1а представлено опорное изображение; на фиг.1в и 1г приведены результаты оконтуривания (предобработка) и фрагментирования (разделительные линии показаны для наглядности); на фиг.1д и 1е представлены нормированные на 1 величины сигналов ВКФ для фрагментов до (фиг.1д) и при появлении объектов (фиг.1е); на фиг.1ж и 1з приведены результаты фильтрации (выделения объектов) соответственно в контурном и реальном виде.
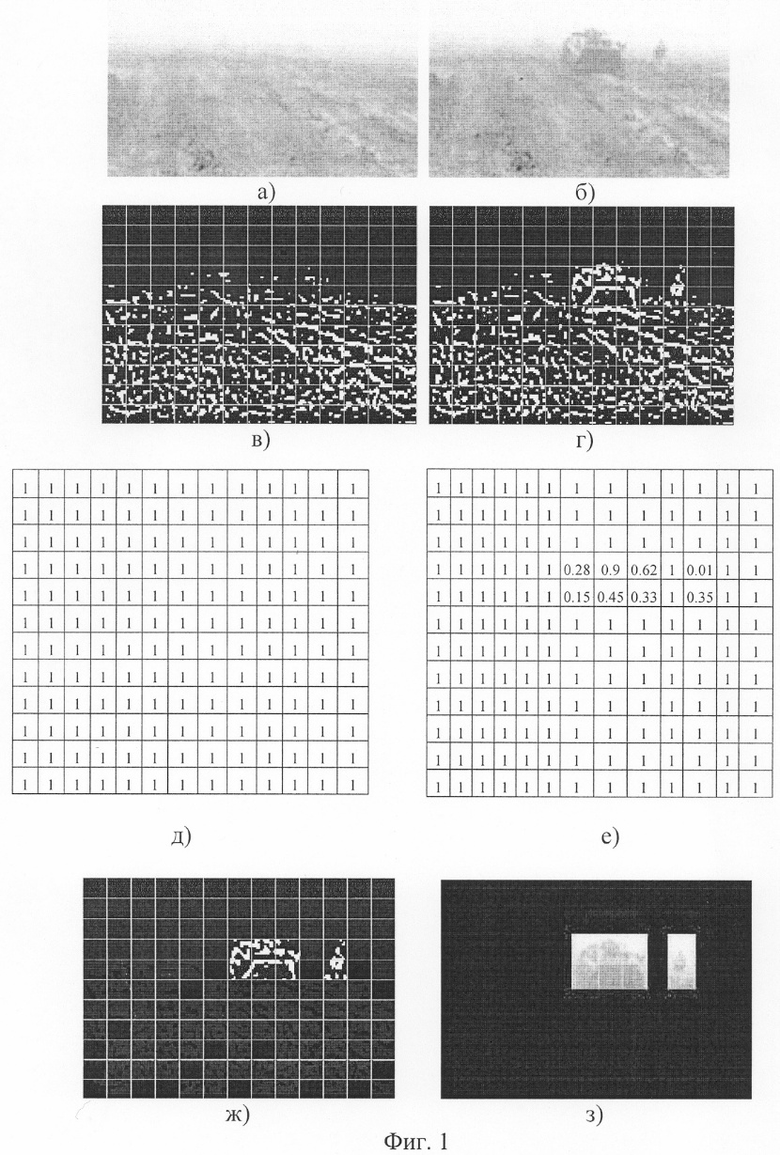
На фиг.2 приведен пример блок-схемы осуществления способа на базе одноканального акусто-оптического коррелятора для обработки видеосигналов [3, с.3,4, приложение 1; 4, с.117-119, приложение 2].
В предложенном способе базовыми операциями являются операции по вычислению взаимно-корреляционной функции (ВКФ), которые осуществляются с помощью вычислителей ВКФ (корреляторов). Они могут выполняться на аналоговой и оптической элементных базах [2, 3].
Блок-схема на фигуре 2 содержит акусто-оптический коррелятор 1, (приложение 1, с.3, 4), электрически соединенный с сумматором 2, выполненным на микросхеме К155ИМ1, электрически соединенным с делителем напряжений 3, выполненным на резисторах, а делитель 3 электрически соединен с одновибратором 4 на микросхеме К1ТШ221Г, который, в свою очередь, электрически соединен с сумматором 5 на микросхеме К155ИМ1. Сумматор 5 электрически соединен с коррелятором 1 через инвертор 6 (ДА4), амплитудным селектором 7 (К561СА1), который электрически соединен с блоком управления 8 на микросхеме К176ИЕ18, электрически соединенным с электронно-лучевой трубкой (ЭЛТ) 9, которая электрически соединена с линией задержки 10 (КР1051ХК4).
Схема работает следующим образом.
Видеосигнал U2(t) поступает на вход коррелятора 1 (приложение 1, рис.2) и на линию задержки 10. В качестве фрагмента в данном случае используется строка изображения. Сигнал взаимно-корреляционной функции опорной и текущей строк фрагментов с выхода коррелятора 1 поступает на сумматор 2, а после него на делитель 3, где суммарную амплитуду делят на величину, пропорциональную числу пикселей в строке и формируют среднее значение амплитуды взаимно-корреляционной функции строки.
Сигнал с выхода делителя 3 поступает на одновибратор 4, с помощью которого формируют прямоугольный импульс с длительностью, равной длительности строки и амплитуды, равной среднему значению амплитуды взаимно-корреляционной функции. Этот импульс подают на вход сумматора 5. Сюда же подают после инвертора 4 и сигнал взаимно-корреляционной функции. Разностный сигнал после пороговой обработки в блоке 7 поступает на блок управления 8, который формирует импульс, запирающий или пропускающий данную строку видеосигнала ЭЛТ 9, на которой формируют изображение объекта, отселектированного от фона. Для обеспечения режима распознавания сигналы изображения могут быть записаны в коррелятор в качестве опорных. Если вместо одного светодиода в схеме коррелятора на рис. 2 (приложение 1) включить несколько, то строка может быть разделена на фрагменты по числу светодиодов, и соответственно должны быть настроены формирователи импульсов 4 и 8.
ЛИТЕРАТУРА
1. Ю.А.Кузнецов, В.А.Шилин. Микросхемотехника БИС на приборах с зарядовой связью. - М.: Радио и связь, 1968, с.160.
2. Л.М.Сороко. Основы голографии и когерентной оптики. - М.: Наука, 1971, с.616.
3. Ю.В.Егоров. Акусто-оптические процессоры (обзор). - Киев: Известия вузов MB и ССО СССР Радиоэлектроника (отдельный оттиск), 1986, с.9.
4. Б.Е.Алешин, А.В.Бондаренко и др. Оптическое распознавание изображений. - М.: изд. ГосНИИАС, 2000, с.279.
5. В.Ф.Козак. Справочник по номенклатуре и аналогам отечественных микросхем. - Новосибирск, 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2003 |
|
RU2250478C2 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Способ подавления временного шума сигналов изображений с тепловизионных оптико-электронных систем | 2023 |
|
RU2818667C1 |
| Система сопровождения подвижных объектов на видео | 2022 |
|
RU2807953C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
Изобретение относится к корреляционной обработке изображений. Его применение в системах автоматического обнаружения, выделения изображений, распознавания и сопровождения объектов позволяет получить технический результат в виде восстановления изображения объекта по параметрам взаимно-корреляционной функции, получения в каждый момент времени полной информации о координатах и перемещениях объекта и измерения параметров объекта и сцены. Этот результат достигается благодаря тому, что в известном способе обработки последовательности изображений, содержащем операции предобработки, запоминания опорного изображения, вычисления взаимно-корреляционной функции опорного и последующих текущих изображений, измерения параметров взаимно-корреляционной функции, разбивают на фрагменты изображения обрабатываемой последовательности для соответствующих фрагментов опорного и текущего изображений вычисляют сигналы взаимно-корреляционных функций, для которых измеряют среднее и из максимального значения вычитают среднее значение, из полученных разностных сигналов после пороговой обработки формируют управляющие сигналы так, что фрагменты текущего изображения, разностные сигналы которых больше или равны заданному пороговому значению, блокируются, а фрагменты, разностные сигналы которых меньше порогового значения, - пропускаются. 3 з.п. ф-лы, 2 ил.
| ТЕЛЕВИЗИОННО-КОРРЕЛЯЦИОННЫЙ ДАЛЬНОМЕР | 1994 |
|
RU2086918C1 |
