Изобретение относится к устройствам для обработки и перемещения и ориентации различных изделий и может быть использовано для работ с экологически опасными объектами, взрывчатыми и химическими веществами, в том числе радиоактивными, в специализированных помещениях.
Преимущественной областью его применения является проектирование, изготовление и оборудование средствами механизации помещений для работ по перемещению взрывчатых и экологически опасных объектов в замкнутых специализированных взрывозащитных условиях, специализированных кабинах, камерах, боксах и других рабочих местах, где проводятся работы по распаковке и упаковке, сборке-разборке экологически опасных объектов, установке их на испытательные стенды для испытаний и контрольных проверок на термо- и газопрочность, химическим взаимодействиям, работ по утилизации и иные опытно-конструкторские и научно-исследовательские эксперименты.
Известно устройство для перемещения деталей (а.с. РФ №1255432, B 25 J 21/00, опубл. 07.09.86 г., БИ №33), содержащее корпус, приводы поворота, линейного перемещения, захвата. Привод поворота выполнен в виде основного вала, с установленным на нем с возможностью поворота дополнительным полым валом. Концевое звено привода линейного перемещения жестко связано с корпусом захвата, причем на наружной поверхности полого вала нарезаны круговые зубья, предназначенные для взаимодействия с зубчатым элементом привода линейного перемещения. Привод захвата включает вал, установленный параллельно основному валу привода поворота и кинематически связанный при помощи гибкой передачи с введенным валом-шестерней, установленным соосно основному валу привода поворота.
Недостатком известного устройства является его сложность, достаточно большие габариты, что особенно нежелательно при достаточно ограниченных объемах защитных боксов или камер, а также отсутствие грузоподъемного механизма, что приводит к снижению функциональных возможностей устройства.
Наиболее близким техническим решением к заявляемому является камера разделки компонентов ядерного реактора (а.с. РФ №1362339, G 21 F 7/06, опубл. 15.06.93 г., БИ №22), содержащая перемещающийся вдоль камеры кран, разделочную шахту с зажимным устройством, станок резки и манипулятор. В шахте установлен подъемник с вращающейся план-шайбой.
Недостатком данного решения для работы в замкнутом объеме является малая зона обслуживания и ограниченные технологические возможности.
Задачей данного изобретения является повышение эффективности использования объема камеры, расширение технологических возможностей, уменьшение габаритов и улучшение условий обслуживания.
Техническим результатом использования данного устройства является механизация работ и повышение для работающего персонала безопасности условий труда в ограниченных стесненных условиях эксплуатации специализированных систем, позволяющим понизить степень риска аварий при работах с экологически опасными объектами.
Задача решается тем, что в устройстве для обработки и перемещения изделий, содержащем корпус с установленными на нем манипулятором и грузоподъемным механизмом, манипулятор выполнен в виде несущего вала, установленного с возможностью вращения на потолочной части корпуса. На верхней части вала на шпонке установлен барабан со стопором и тормозное устройство. На нижней части вала шарнирно установлена подвеска с возможностью вертикального перемещения, кинематически связанная с элементами горизонтального перемещения, соединенными между собой телескопически, причем один из них соединен с подвеской посредством ходового винта, а второй имеет приемник для перемещения изделий по горизонтали. Грузоподъемный механизм связан с барабаном гибкой связью. Устройство снабжено штурвалом его фиксации. Подвеска выполнена в виде маховика с цилиндрической юбкой; в отверстия, выполненные на ней, установлены элементы горизонтального перемещения. В нижней части подвески на валу установлена регулировочная обойма перемещения подвески по вертикали, а в верхней части подвески на валу установлен штурвал для фиксации подвески после ее перемещения. Вал снабжен рукояткой для его вращения при использовании грузоподъемного устройства. Ходовой винт снабжен штурвалом.
Такое конструктивное выполнение устройства для обработки и перемещения изделий повышает эффективность использования объема камеры за счет увеличения степеней свободы отдельных частей манипулятора, в том числе телескопической связи элементов горизонтального перемещения. Установка всех рабочих органов на одном валу значительно уменьшила габаритные размеры манипулятора и улучшила удобство его обслуживания в защитных камерах. Устройство позволяет вводить изделие в замкнутую специализированную систему в виде помещения, оборудованного шлюзовым тамбуром, контрольно-измерительными и испытательными приборами и установками для проведения работ, связанных с перемещением изделия в этой системе по вертикали и горизонтали с возможностью установки его или его частей на приемник и грузоподъемное устройство, в накопитель и из накопителя, вывод объекта из системы, что расширяет технологические возможности устройства.
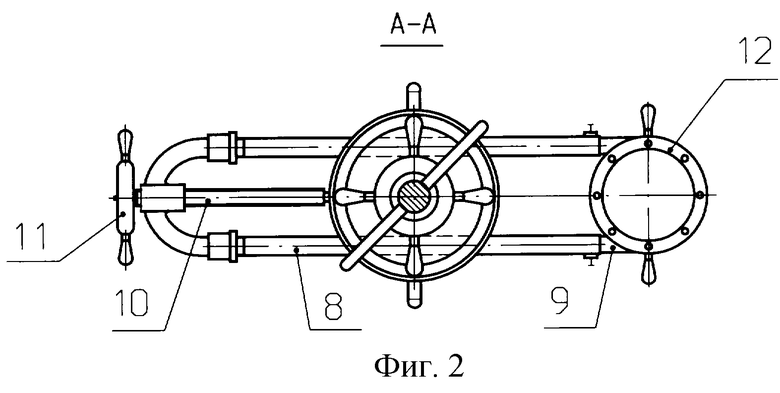
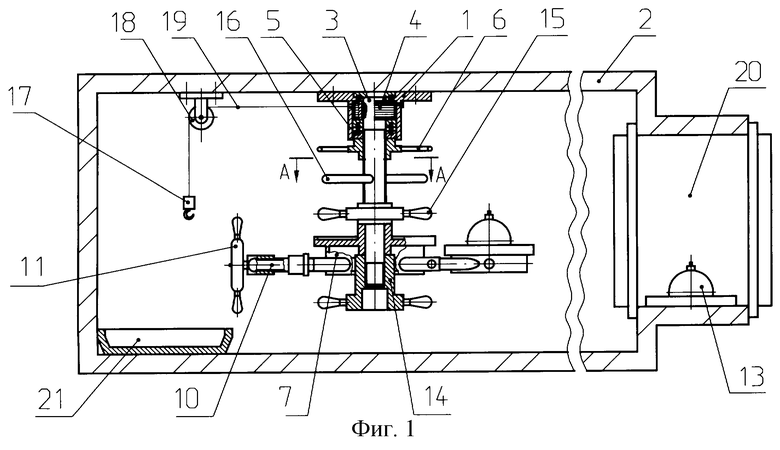
Устройство показано на фиг. 1 (общий вид) и фиг. 2 (сечение АА). Манипулятор содержит монтажную корзину 1, установленную жестко к потолочной части помещения 2. В монтажную корзину шарнирно установлен несущий вал 3, на котором в верхней части на шпонке установлен барабан 4 со стопором (не показан) и тормозное устройство 5 со штурвалом его фиксации 6. На нижней части вала 3 шарнирно установлена подвеска 7, выполненная в виде маховика с цилиндрической юбкой, в отверстия, выполненные на ней, установлены элементы горизонтального перемещения 8 и 9, соединенные между собой телескопически, причем телескопический элемент 8, выполненный с резьбовой втулкой, с одной стороны соединен с юбкой подвески 7 шарнирно ходовым винтом 10, на котором установлен штурвал 11 для точного перемещения телескопического элемента 8 по горизонтали, а с другой стороны с телескопическим элементом 9, имеющим приемник 12 для ручного его перемещения с объектом 13 по горизонтали. В нижней части подвески 7 на валу 3 установлена регулировочная обойма 14 перемещения подвески 7 по вертикали, а в верхней части подвески 7 на валу 3 установлен штурвал 15 для фиксации подвески 7 после ее перемещения. В средней части вала 3 установлены рукоятки 16 для его вращения при использовании грузоподъемного устройства 17, соединенного через блок 18 гибкой связью 19 с барабаном 4, имеющим стопор (не показан) и тормозное устройство 5.
Манипулятор используется следующим образом.
Объект 13 через шлюзовую камеру 20 вводится в специализированное помещение 2. Удерживая за рукоятки 16 вал 3 от вращения, вращением штурвала 6 приводится в действие тормозное устройство 5, ограничивающее свободное вращение вала 3 с барабаном 4, который фиксируется стопором (не показан). Для приема объекта 13 на приемник 12, удерживая за рукоятки 16 вал 3 от вращения, вращением штурвала 15 подвеска 7 отжимается от обоймы 14 путем поворота его вокруг оси и телескопическим элементом 9 с приемником 12 устанавливается в ориентированное положение приемником 12 в направлении к объекту 13, после чего подвеска 7 фиксируется поджатием к обойме 14 штурвалом 15. Телескопический элемент 9 с приемником 12 выдвигается в направлении объекта 13, который устанавливается на приемник 12, после чего телескопический элемент 9 с приемником 12 устанавливается в исходное положение.
Далее, удерживая за рукоятки 16, вращением штурвала 15 подвеска 7 отжимается от обоймы 14 и поворачивается вместе с телескопическими элементами 8 и 9, а также с приемником 12 и объектом 13 на 180° в ориентированное положение к грузоподъемному устройству 17 для проведения совместных технологических операций с объектом 13 у накопителя 21. В этом положении подвеска 7 фиксируется штурвалом 15. Грузоподъемное устройство 17 приводится в действие следующим образом. Удерживая за рукоятки 16 от вращения вал 3 стопор барабана 4 выводится из зацепления и штурвалом 6 тормозное устройство 5 растормаживается, ослабив штурвалом 15 подвеску 7 придерживают ее от вращения, а рукоятками 16 вращают вал 3 и опускают или поднимают грузоподъемное устройство 17 к накопителю или к объекту 13 на нужную высоту. Для совместных работ объекта 13 с грузоподъемным устройством 17, последнее блокируется путем удерживания за рукоятки 16 вал 3 от вращения, путем вращения штурвала 6 приводится в действие тормозное устройство 5 и вводится в зацепление стопор барабана 4 и штурвалом 15 стопорится подвеска 7. Для горизонтального перемещения объекта 13 на приемнике 12 к заблокированному грузоподъемному устройству 17 телескопический элемент 9 выдвигается вместе с приемником 12 к грузоподъемному устройству 17 вручную, а для точного его перемещения по горизонтали штурвалом 11 вращается винт 10.
Для вертикального перемещения объекта 13 к грузоподъемному устройству 17 подвеска 7 перемещается вверх или вниз вращением штурвала 15 и обоймы 14 с фиксацией необходимого положения подвески 7 по вертикали штурвалом 15. Для вывода объекта 13 из системы операции манипулирования производятся в обратной последовательности. При зафиксированном положении подвески 7 штурвалом 15, расстопоренном барабане 4 и расторможенном тормозном устройстве 5 грузоподъемное устройство 17 имеет возможность синхронного перемещения по вертикали вместе с одновременным вращением подвески 7 манипулятора вокруг оси вала 3 при вращении его рукоятками 16.
Таким образом манипулятор позволяет вводить и выводить в помещение и из помещения указанные выше объекты, а также инструменты и оборудование с оснасткой для проведения работ с ними в специализированных условиях. Позволяет производить в ограниченных стесненных условиях все необходимые перемещения, а именно по горизонтали в любых направлениях плоскости ручным и микрометрическим способами и по вертикали вниз и вверх.
Манипулятор обслуживается грузоподъемным устройством с ручным управлением, связанным гибкой связью с манипулятором, что не требует дополнительных сложных устройств, которые в ограниченных условиях специализированных помещений могут быть нежелательны. Перечисленные признаки позволяют производить с экологически опасными объектами среднего веса и габаритов все виды работ, которые ранее выполнить было невозможно или выполнялись с большим риском аварий ручными примитивными приемами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАГРУЗКИ ПЕНАЛА С РАДИОНУКЛИДОМ ВЫСОКОЙ АКТИВНОСТИ В ЗАЩИТНЫЙ КОНТЕЙНЕР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2735799C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| ОБЪЕКТ БРОНЕТЕХНИКИ НА КОЛЕСНОМ ШАССИ | 2007 |
|
RU2355977C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ СТРОИТЕЛЬНОЙ ЛЮЛЬКИ | 1994 |
|
RU2074299C1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |
| ЗАЩИТНО-ЛОКАЛИЗУЮЩИЙ МОДУЛЬ БЫСТРОГО РАЗВЕРТЫВАНИЯ ДЛЯ ОБЕЗВРЕЖИВАНИЯ И УТИЛИЗАЦИИ ЭКОЛОГИЧЕСКИ ОСОБО ОПАСНЫХ ОБЪЕКТОВ | 2008 |
|
RU2392674C1 |
| Устройство для аварийной эвакуации оператора из кабины управления мостового крана | 1979 |
|
SU880952A1 |
| ПРЕВЕНТОР ПЛАШЕЧНЫЙ ГИДРАВЛИЧЕСКИЙ | 2015 |
|
RU2584707C1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
Изобретение относится к устройствам для обработки и перемещения и ориентации различных изделий и может быть использовано для работ с экологически опасными объектами, взрывчатыми и химическими веществами, в том числе радиоактивными, в специализированных помещениях. Устройство содержит корпус, с установленными на нем манипулятором и грузоподъемным механизмом. Манипулятор выполнен в виде несущего вала, установленного с возможностью вращения на потолочной части корпуса. На верхней части вала на шпонке установлен барабан со стопором и тормозное устройство. На нижней части вала шарнирно установлена подвеска с возможностью вертикального перемещения, кинематически связанная с элементами горизонтального перемещения, соединенными между собой телескопически, причем один из них соединен с подвеской посредством ходового винта, а второй имеет приемник для перемещения изделий по горизонтали. Грузоподъемный механизм связан с барабаном гибкой связью. Технический результат: механизация работ и повышение безопасности условий труда, а также понижение степени риска аварий при работах с экологически опасными объектами. 5 з.п. ф-лы, 2 ил.
| Камера разделки компонентов ядерного реактора | 1985 |
|
SU1362339A1 |
| Камера разделки топливных сборок ядерного реактора | 1984 |
|
SU1250081A1 |
| RU 94019483А1, 27.04.1996 | |||
| WO 9719380 А1, 29.05.1997 | |||
| JP 10010291 А, 16.01.1998. | |||

