Изобретение относится к области военной техники и может быть использовано в конструкциях зенитных установок ближнего действия, имеющих стрелково-пушечное и ракетное вооружение.
Известна 35-ти мм ствольная зенитная самоходная установка (ЗСУ) "Гепард" (Германия) (1), которая вооружена двумя автоматическими пушками, размещенными по бокам вращающейся башни. На башне также установлены радиолокационная станция (РЛС) обнаружения цели, РЛС сопровождения цели и оптический прицел (ОП). Недостатком ЗСУ является низкая точность наведения линии визирования ОП с помощью прицельной марки (порядка 3-4 мрад).
Наиболее близким к заявляемой боевой машине (БМ) является устройство, реализованное в боевых машинах комплексов "Тунгуска", "Тунгуска М", "Тунгуска M1" (2, 3).
БМ комплексов типа "Тунгуска" содержит самоходное шасси с системой измерения углов качек, башенную установку с пушечным (ПВ) и ракетным (РВ) вооружением, радиолокационную станцию (РЛС) обнаружения целей, РЛС сопровождения цели с антенной и приводами наведения и стабилизации антенны, оптико-электронную аппаратуру визирования зенитной управляемой ракеты (ЗУР), оптический прицел с датчиком команд (ДК) и приводом наведения и стабилизации, пульт управления БМ и цифровую вычислительную систему (ЦВС) БМ.
В БМ комплексов типа "Тунгуска" реализована идея объединения двух видов вооружения ракетного и пушечного в одной БМ, а также реализованы два режима сопровождения цели: радиолокационный и оптический с возможностью перехода с режима на режим, с использованием взаимного подслеживания по угловым координатам ОП и антенны РЛС сопровождения. Радиолокационный режим автоматический и осуществляется РЛС сопровождения цели по трем координатам (ε, β, Д). Оптический же режим предусматривает наведение ОП на цель наводчиком только по угловым координатам (ε, β) и осуществляется с помощью датчика команд. ДК представляет собой электронно-механическое устройство, состоящее из кнюппеля (поворотное устройство), шарнирно связанного с датчиками углового положения ОП. Наводчик, перемещая кнюппель, задает скорость наведения ОП по угловым координатам в зависимости от выбранного вида вооружения, и с помощью светящихся марок (окружностей), имеющихся в окуляре ОП, наводит линию визирования ОП на цель. Наведение осуществляется грубо, путем совмещения с целью большой марки диаметром 3 мрад и точно - путем совмещения малой марки диаметром 0,5 мрад. При этом ошибки наведения при стрельбе ПВ идентичны ошибкам наведения ЗСУ "Гепард" и составляют также 3-4 мрад. Для стрельбы ЗУР такие ошибки недопустимы и должны быть как минимум на порядок меньше. С целью уменьшения ошибок наведения было введено устройство, позволяющее наводчику наводить ОП на цель с разными скоростями, - для ПВ - 30°/с и РВ - 10°/с, а также запоминание текущих скоростей наведения, задаваемых наводчиком. Такое устройство наведения позволило уменьшить ошибки до 0,3-0,4 мрад. Однако ошибки наведения в данном случае полностью зависят от личных качеств человека-наводчика, его психофизического состояния и профессиональной подготовленности. В процессе полигонных испытаний БМ комплексов типа "Тунгуска" и эксплуатации в войсках была экспериментально установлена зависимость точности наведения ОП от профессиональной подготовленности наводчика. Точность наведения составила при средней квалификации наводчика - 0,4-0,6 мрад при высокой квалификации - 0,2-0,3 мрад.
Задачей предлагаемого изобретения является повышение точности наведения ОП на цель и эффективности боевой машины в целом за счет уменьшения влияния уровня профессиональной подготовленности наводчика.
Поставленная задача решается тем, что в боевую машину, содержащую башенную установку с пушечным и ракетным вооружением, РЛС обнаружения цели, РЛС сопровождения цели 1 с антенной 2 и приводом наведения и стабилизации антенны 3, оптический канал наведения 4 с оптическим прицелом 5, датчиком команд 6 и приводом наведения и стабилизации ОП 7, пульт управления БМ 8 и цифровую вычислительную систему БМ 9, связанную с РЛС сопровождения цели 1, введены блок коррекции привода наведения и стабилизации антенны 10, блок преобразования сигналов управления 11, блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12, устройство формирования команды "Разгрузка" 13 и сумматор 14, при этом выход РЛС сопровождения 1 соединен с входом блока вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12, первый выход которого соединен с первым входом сумматора, а второй - с первым входом устройства формирования команды "Разгрузка" 13, второй и третий входы которого соединены с выходами пульта управления БМ 8, выход устройства формирования команды "Разгрузка" соединен с входом блока коррекции привода наведения и стабилизации антенны 10, выход которого подключен к входу привода наведения и стабилизации антенны 3, выход устройства формирования команды "Разгрузка" 13 соединен также с первым входом блока преобразования сигналов управления 11, второй вход которого соединен с выходом датчика команд 6, а выход - со вторым входом сумматора, выход которого соединен с входом привода наведения и стабилизации оптического прицела.
Предполагаемое изобретение поясняется графическими материалами.
На фиг.1 приведена блок-схема устройства боевой машины для осуществления способа наведения ОП на цель.
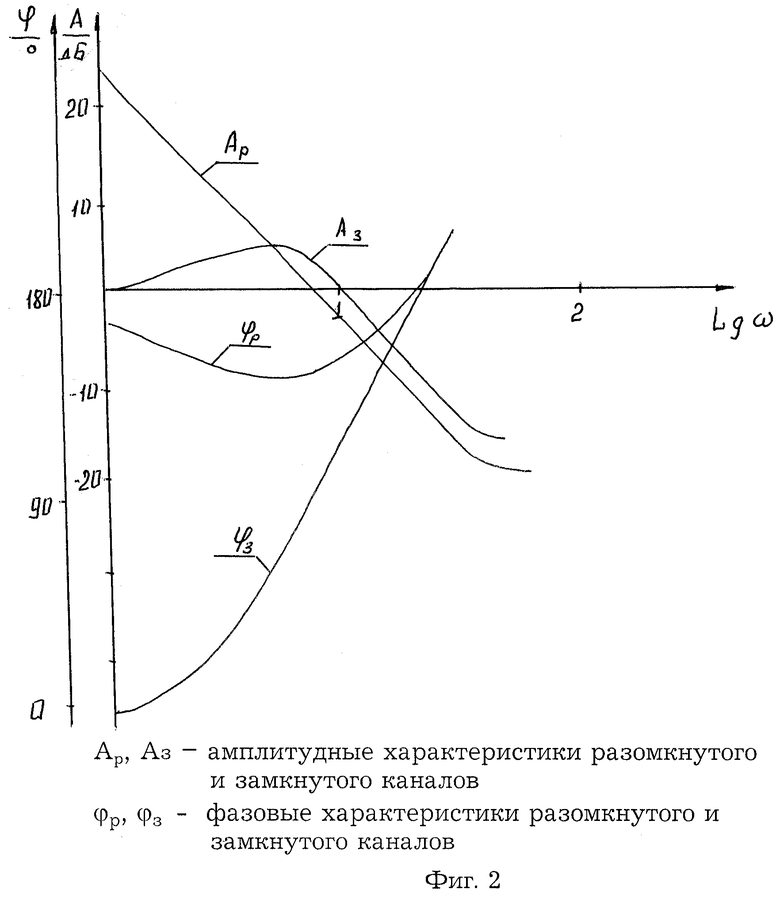
На фиг.2 приведена амплитудно-фазовая частотная характеристика привода наведения и стабилизации антенны по азимутальному каналу с учетом блока коррекции.
На фиг.3 приведена амплитудно-фазовая частотная характеристика привода наведения и стабилизации антенны по угломестному каналу с учетом блока коррекции.
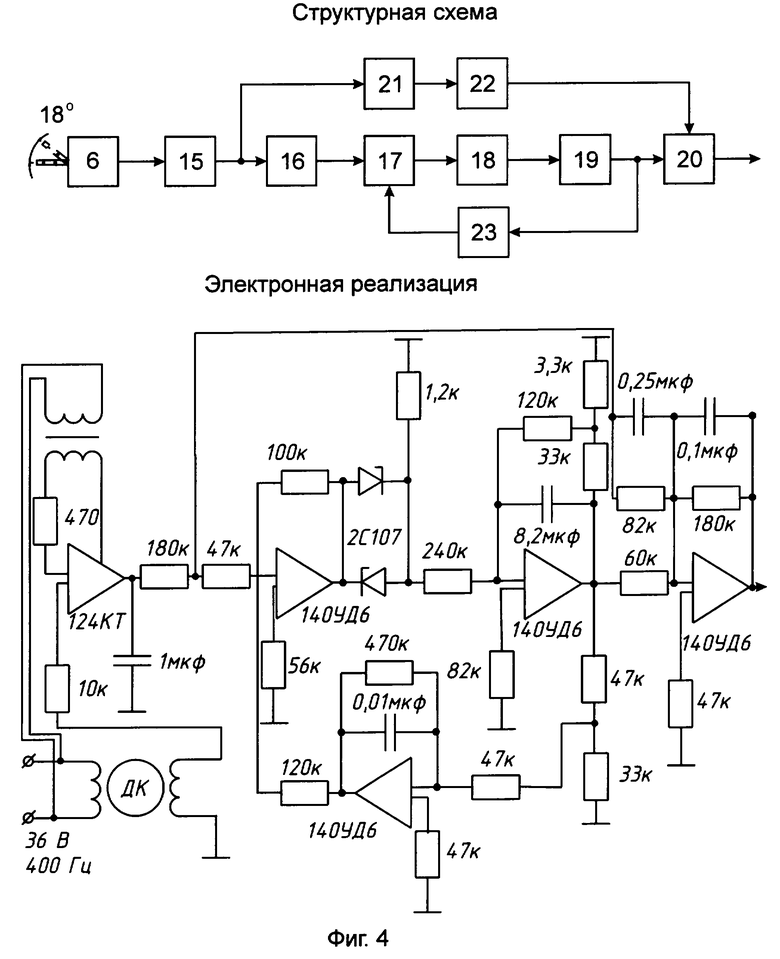
На фиг.4 приведены структурная схема и электронная реализация блока преобразования сигналов управления с переключателем скоростей наведения.
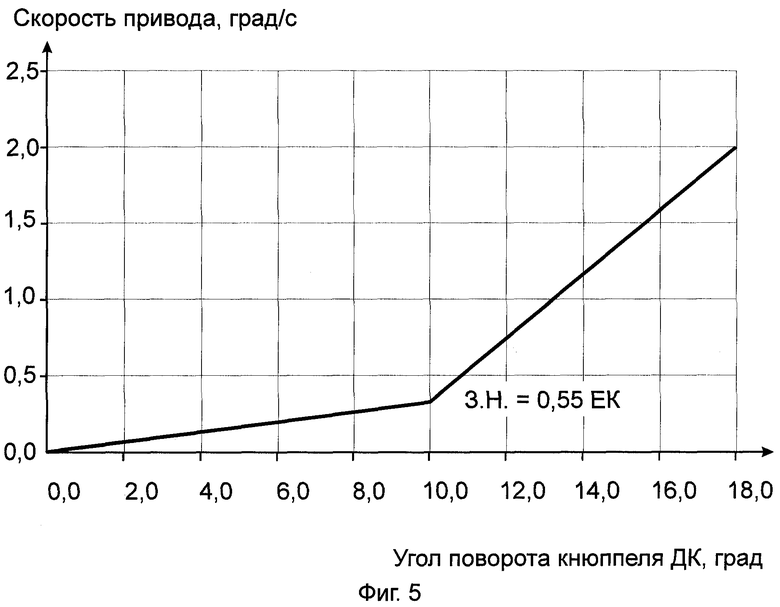
На фиг.5 приведен график зависимости скорости привода наведения и стабилизации ОП от угла поворота кнюппеля ДК, при подаче команды “Разгрузка”.
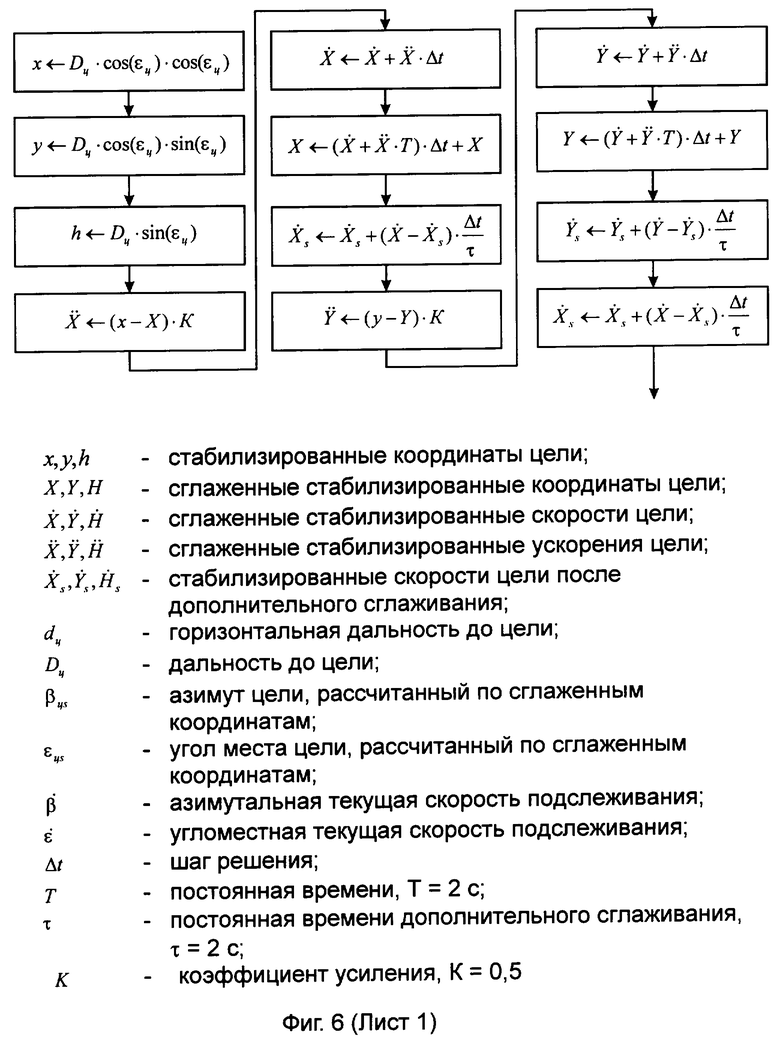
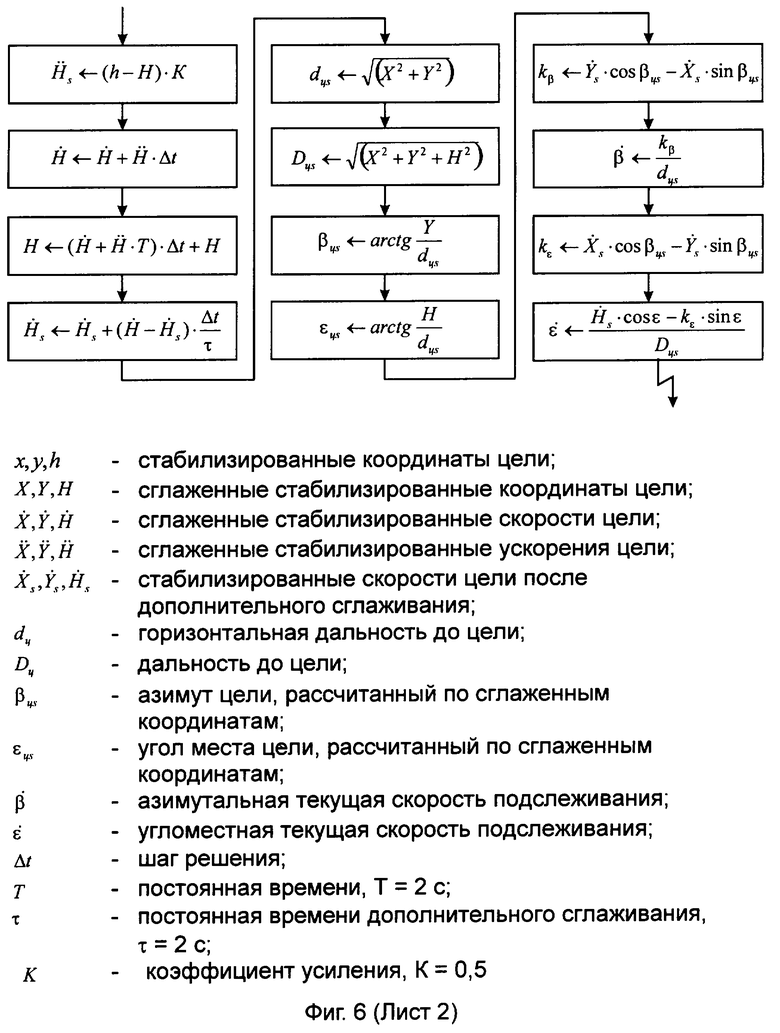
На фиг.6 приведена блок-схема блока вычислений скоростей изменения угловых координат цели и выработки сигналов подслеживания.
На фиг.7 приведена структурная схема одного из каналов формирования сглаженной декартовой координаты, скорости и ускорения.
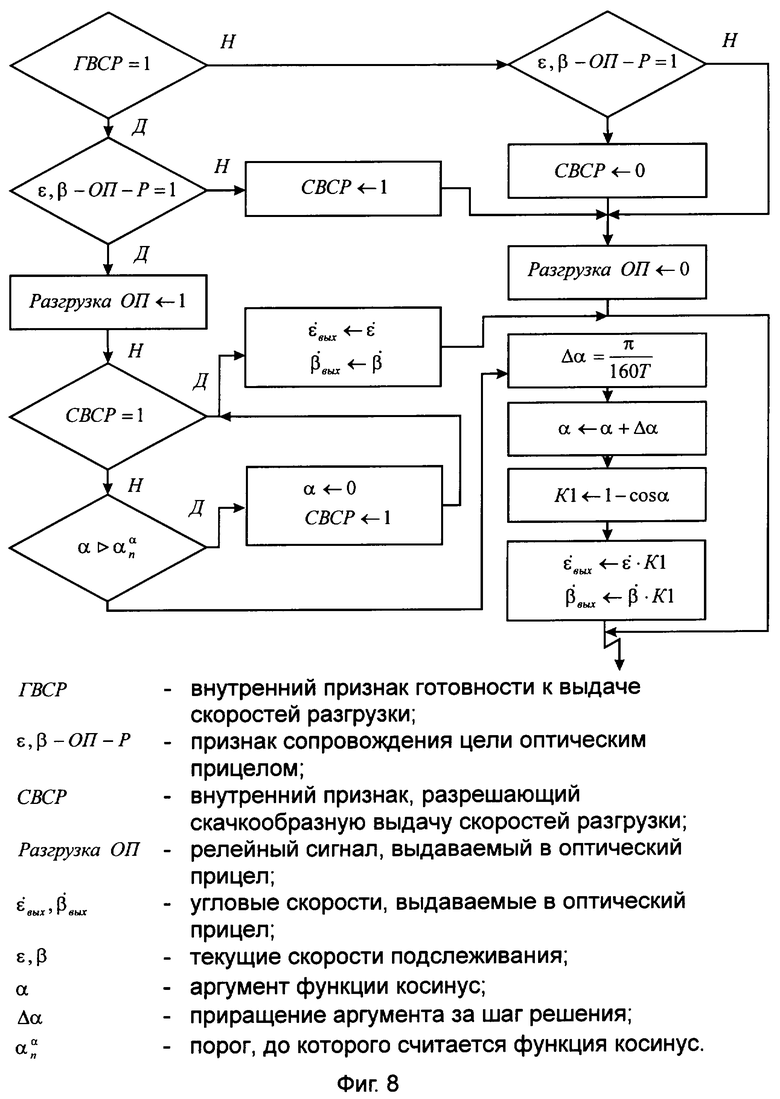
На фиг.8 приведена блок-схема устройства формирования команды “Разгрузка”.
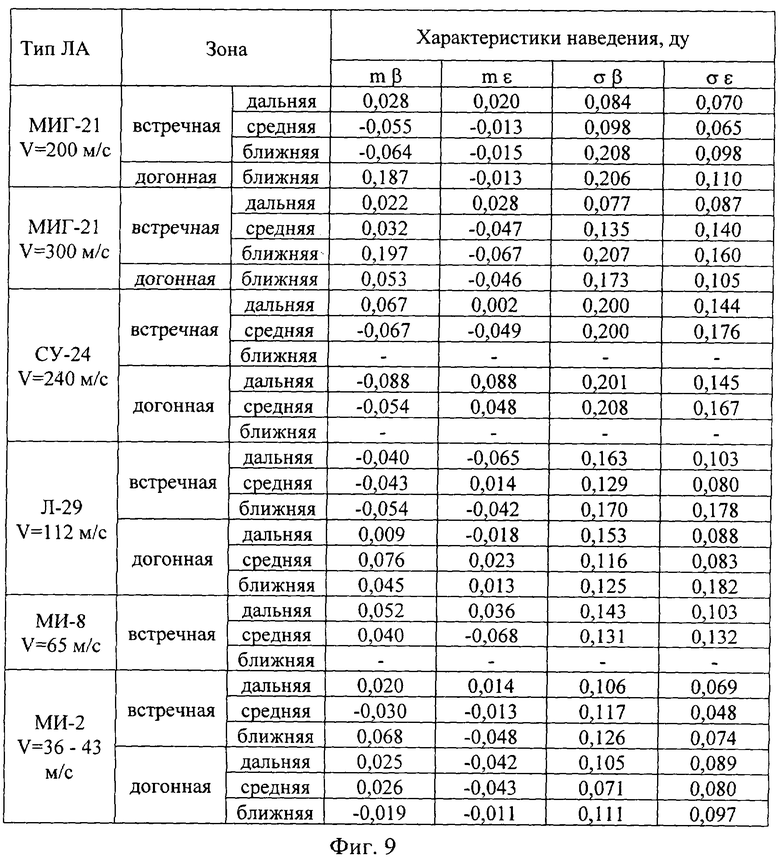
На фиг.9 приведены характеристики точности наведения наводчиком, при автоматическом скоростном сопровождении цели прицелом, при пуске ЗУР на БМ “Тунгуска-М1” по результатам испытаний.
Блок коррекции привода наведения и стабилизации антенны 10 с переключателем структуры привода представляет собой электронное устройство, позволяющее повышать плавность сопровождения цели и снизить в 1,7-2,0 раза среднеквадратические ошибки определения координат цели за счет сужения полосы пропускания привода наведения и стабилизации антенны 3.
Структура блока коррекции привода наведения и стабилизации антенны 10 формируется из условия идентичности логарифмических, амплитудно-фазовых характеристик разомкнутых и замкнутых контуров приводов наведения и стабилизации антенны характеристикам, изображенным на фиг.2, 3.
Блок коррекции привода наведения и стабилизации антенны 10 реализуется набором корректирующих фильтров (см. рис. 3.13-3.34 книги "Проектирование следящих систем" под ред. Л.Рабиновича, изд. Машиностроение, 1969 г.). Дополнительно могут быть применены другие источники (4, 5, 6).
Блок преобразования сигналов управления 11 с переключателем скоростей наведения представляет собой электронное устройство, обеспечивающее соответствующий коэффициент передачи сигналов управления в зависимости от угла, скорости и ускорения кнюппеля датчика команд 6.
Структурная схема и электронная реализация блока преобразования сигналов управления 11 с переключателем скоростей наведения изображены на фиг.4, где обозначено:
15 - переключатель скоростей наведения;
16 - усилительное звено с коэффициентом усиления 2;
17 - сумматор с коэффициентом суммирования 1;
18 - усилительное звено с зоной нечувствительности ±0,7 В и коэффициентом усиления 0,63 на частоте 0,1 Гц;
19 - корректирующее звено с передаточной функцией  , где К=5, Т=10 с;
, где К=5, Т=10 с;
20 - сумматор с коэффициентом суммирования 1;
21 - усилительное звено с коэффициентом усиления 0,3;
22 - корректирующее звено с передаточной функцией  , где T1=0,1 с, Т2=0,01 с;
, где T1=0,1 с, Т2=0,01 с;
23 - корректирующее звено с передаточной функцией  , где К=0,44, Т=0,47 с.
, где К=0,44, Т=0,47 с.
График, изображенный на фиг.5 показывает, что при угле поворота кнюппеля ДК 6 до 10 градусов скорость привода наведения и стабилизации ОП 7 изменяется от 0 до 0,3°/с, при угле поворота кнюппеля ДК 6 от 10 до 18 градусов скорость привода наведения и стабилизации ОП 7 изменяется от 0,3 до 2°/с.
Блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12, устройство формирования команды "Разгрузка" 13 и сумматор 14 выполнены на элементах вычислительной техники и выполняют соответствующие им функции (см. фиг.6, 8).
Структурная схема одного из каналов формирования сглаженной декартовой координаты, скорости и ускорения, использующихся в блоке 12 при вычислении скоростей изменения угловых координат цели и выработки сигналов подслеживания, изображена на фиг.7.
Процесс наведения оптического прицела на цель происходит следующим образом: РЛС обнаружения целей осуществляет круговой обзор пространства и при появлении "чужой" цели (отметки) на экране кругового обзора, оператор РЛС совмещает маркер целеуказания с отметкой от цели, при этом в ЦВС БМ поступают сигналы, пропорциональные азимуту (β) и дальности (Д) до цели, которые затем поступают на привод наведения и стабилизации антенны 3 и дальномер РЛС сопровождения цели 1, после чего РЛС сопровождения цели 1 производит допоиск цели по углу места (ε) и берет цель на автосопровождение по трем координатам (ε, β, Д), при этом координаты цели (ε, β, Д) поступают в цифровую вычислительную систему БМ 9, где они используются для выработки команд управления ЗУР. При входе цели в зону поражения ЗУР с пульта управления БМ 8 на устройство формирования команды "Разгрузка" поступает команда "Р".
Одновременно координаты цели (ε, β, Д) из РЛС сопровождения цели 1 поступают в блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12. Из блока 12 скоростные сигналы подслеживания ( ) поступают в устройство формирования команды "Разгрузка" 13 и через сумматор 14 на вход привода наведения и стабилизации ОП 7, который отрабатывает их, тем самым осуществляется автоматическое подслеживание ОП 5 за скоростным изменением угловых координат цели. С этого момента ОП автоматически сопровождает цель с шумами в сигналах подслеживания, пропорциональными шумам в координатах цели. РЛС 1 продолжает автоматически сопровождать цель, а наводчик через окуляр ОП 5 пытается обнаружить цель и в случае ее обнаружения с пульта управления БМ 8 выдается команда "ОП", которая поступает на вход устройства формирования команды "Разгрузка" 13. При наличии на входах устройства формирования команды "Разгрузка" сигналов подслеживания (
) поступают в устройство формирования команды "Разгрузка" 13 и через сумматор 14 на вход привода наведения и стабилизации ОП 7, который отрабатывает их, тем самым осуществляется автоматическое подслеживание ОП 5 за скоростным изменением угловых координат цели. С этого момента ОП автоматически сопровождает цель с шумами в сигналах подслеживания, пропорциональными шумам в координатах цели. РЛС 1 продолжает автоматически сопровождать цель, а наводчик через окуляр ОП 5 пытается обнаружить цель и в случае ее обнаружения с пульта управления БМ 8 выдается команда "ОП", которая поступает на вход устройства формирования команды "Разгрузка" 13. При наличии на входах устройства формирования команды "Разгрузка" сигналов подслеживания ( ) и команд "Р" и "ОП" вырабатывается команда "Разгрузка", которая поступает в блок коррекции привода наведения и стабилизации 10 на переключатель структуры привода, который срабатывает и подключает блок 10 к приводу наведения и стабилизации антенны 3, при этом изменяется структура привода наведения и стабилизации антенны 3, повышаются плавность и точность сопровождения цели, за счет сужения полосы пропускания привода наведения и стабилизации антенны 3 и уменьшения уровня шумов в угловых координатах цели, что, в свою очередь, уменьшает ошибки в вычислениях текущих угловых скоростей сигналов подслеживания ОП 5 до 0,08-0,1 мрад. Команда "Разгрузка" поступает также в блок преобразования сигналов управления 11 на переключатель скоростей управления, который срабатывает и подключает блок 11 к датчику команд 6, что уменьшает скорость изменения сигналов управления с ДК 6 до 2°/с (см. фиг.5). В сумматоре 14 сигналы управления суммируются с сигналами подслеживания и затем суммарный сигнал поступает на вход привода наведения и стабилизации ОП 5. Цель плавно сопровождается РЛС 1, а наводчик продолжает визуально наблюдать цель в окуляр ОП 5 и при необходимости совмещать малую марку с целью. Рассогласование между малой маркой и целью возможно из-за накапливающихся небольших ошибок в сигналах подслеживания и ошибок разъюстировки оптической и электрической осей ОП 5 и антенны 2 РЛС 1. Для компенсации этих рассогласований не требуется больших скоростей, что позволяет снизить скорость наведения ОП 5 до 0,3°/с (см. фиг.5), независимо от применяемого вида вооружения. Дальнейшее участие наводчика в процессе наведения сводится к визуальному наблюдению подслеживания ОП 5 за целью, сопровождаемую РЛС 1, при этом малая марка и цель практически неподвижны и в случае "сползания" малой марки с цели наводчик плавно "набрасывает" ее на цель. Цель устойчиво сопровождается оптическим прибором вплоть до ее поражения.
) и команд "Р" и "ОП" вырабатывается команда "Разгрузка", которая поступает в блок коррекции привода наведения и стабилизации 10 на переключатель структуры привода, который срабатывает и подключает блок 10 к приводу наведения и стабилизации антенны 3, при этом изменяется структура привода наведения и стабилизации антенны 3, повышаются плавность и точность сопровождения цели, за счет сужения полосы пропускания привода наведения и стабилизации антенны 3 и уменьшения уровня шумов в угловых координатах цели, что, в свою очередь, уменьшает ошибки в вычислениях текущих угловых скоростей сигналов подслеживания ОП 5 до 0,08-0,1 мрад. Команда "Разгрузка" поступает также в блок преобразования сигналов управления 11 на переключатель скоростей управления, который срабатывает и подключает блок 11 к датчику команд 6, что уменьшает скорость изменения сигналов управления с ДК 6 до 2°/с (см. фиг.5). В сумматоре 14 сигналы управления суммируются с сигналами подслеживания и затем суммарный сигнал поступает на вход привода наведения и стабилизации ОП 5. Цель плавно сопровождается РЛС 1, а наводчик продолжает визуально наблюдать цель в окуляр ОП 5 и при необходимости совмещать малую марку с целью. Рассогласование между малой маркой и целью возможно из-за накапливающихся небольших ошибок в сигналах подслеживания и ошибок разъюстировки оптической и электрической осей ОП 5 и антенны 2 РЛС 1. Для компенсации этих рассогласований не требуется больших скоростей, что позволяет снизить скорость наведения ОП 5 до 0,3°/с (см. фиг.5), независимо от применяемого вида вооружения. Дальнейшее участие наводчика в процессе наведения сводится к визуальному наблюдению подслеживания ОП 5 за целью, сопровождаемую РЛС 1, при этом малая марка и цель практически неподвижны и в случае "сползания" малой марки с цели наводчик плавно "набрасывает" ее на цель. Цель устойчиво сопровождается оптическим прибором вплоть до ее поражения.
Таким образом, использование предлагаемого технического решения позволяет весь процесс наведения оптического прицела приблизить к автоматическому наведению практически на неподвижную цель, что упрощает процесс наведения и позволяет уменьшить ошибки наведения наводчика до 0,1-0,2 мрад (см. фиг.9), а следовательно, и повысить эффективность боевого использования вооружения БМ за счет уменьшения влияния уровня профессиональной подготовленности наводчика.
Источники информации
1. Jane's Land-Based Air Defence, 1997-98 гг., pp 57-59, 116-120 - аналог.
2. Специализированный оружейный журнал "Ружье, оружие и амуниция", №6, 1999 г., стр.51-55.
Издатель ООО "Издательский Дом "Петербургский" - аналог.
3. Патент №2135924 от 27.08.1999 г., Россия - прототип.
4. "Следящие приводы" под ред. Б.Чемоданова, изд. Энергия, 1976 г.
5. "Техническая кибернетика" под ред. В.Солодовникова, изд. Машиностроение, 1986 г.
6. "Современная теория фильтров и их проектирование" под ред. Г.Темеша, изд. Мир, 1977 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА НА ЦЕЛЬ | 2001 |
|
RU2217681C2 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 1999 |
|
RU2156943C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ВОЗДУШНОЙ ЦЕЛИ ПО ЕЕ УСТАНОВЛЕННОЙ СКОРОСТИ | 2013 |
|
RU2558407C2 |
| Зенитная ракетно-пушечная боевая машина | 2016 |
|
RU2618663C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |


Изобретение относится к области военной техники и может быть использовано в конструкциях зенитных установок ближнего действия, имеющих стрелково-пушечное и ракетное вооружение. Технический результат - повышение точности наведения оптического прицела (ОП) на цель и увеличение эффективности боевой машины в целом. Боевая машина (БМ) содержит башенную установку с пушечным и ракетным вооружением, РЛС обнаружения цели, РЛС сопровождения цели с антенной и приводом наведения и стабилизации антенны, оптический канал наведения с ОП, датчиком команд и приводом наведения и стабилизации ОП, пульт управления БМ и цифровую вычислительную систему БМ, связанную с РЛС сопровождения цели. В боевую машину введены блок коррекции привода наведения и стабилизации антенны, блок преобразования сигналов управления, блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания, устройство формирования команды “Разгрузка” и сумматор, при этом выход РЛС сопровождения соединен с входом блока вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания, первый выход которого соединен с первым входом сумматора, а второй - с первым входом устройства формирования команды “Разгрузка”, второй и третий входы которого соединены с выходами пульта управления БМ. Выход устройства формирования команды “Разгрузка” соединен с входом блока коррекции привода наведения и стабилизации антенны, выход которого подключен к входу привода наведения и стабилизации антенны, выход устройства формирования команды “Разгрузка” соединен также с первым входом блока преобразования сигналов управления, второй вход которого соединен с выходом датчика команд, а выход - с вторым входом сумматора, выход которого соединен с входом привода наведения и стабилизации оптического прицела. 9 ил.

Боевая машина (БМ), содержащая башенную установку с пушечным и ракетным вооружением, РЛС обнаружения цели, РЛС сопровождения цели с антенной и приводом наведения и стабилизации антенны, оптический канал наведения с оптическим прицелом (ОП), датчиком команд и приводом наведения и стабилизации ОП, пульт управления БМ и цифровую вычислительную систему БМ, связанную с РЛС сопровождения цели, отличающаяся тем, что в нее введены блок коррекции привода наведения и стабилизации антенны, блок преобразования сигналов управления, блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания, устройство формирования команды “Разгрузка” и сумматор, при этом выход РЛС сопровождения соединен с входом блока вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания, первый выход которого соединен с первым входом сумматора, а второй - с первым входом устройства формирования команды “Разгрузка”, второй и третий входы которого соединены с выходами пульта управления БМ, выход устройства формирования команды “Разгрузка” соединен с входом блока коррекции привода наведения и стабилизации антенны, выход которого подключен к входу привода наведения и стабилизации антенны, выход устройства формирования команды “Разгрузка” соединен также с первым входом блока преобразования сигналов управления, второй вход которого соединен с выходом датчика команд, а выход - с вторым входом сумматора, выход которого соединен с входом привода наведения и стабилизации оптического прицела.
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| БОЕВАЯ МАШИНА | 1996 |
|
RU2108532C1 |
| DE 3103919 А1, 02.05.1985 | |||
| Аза-арил-1Н-пиразол-1-ил-сульфонамиды | 2013 |
|
RU2627268C2 |
| US 5062586 А, 05.11.1991. | |||

