Изобретение относится к области вооружения и может быть использовано в войсках противовоздушной обороны.
Известна 35-миллиметровая ствольная зенитная самоходная установка (ЗСУ) "Гепард" (Германия) (1), в которой наведение оптического прицела (ОП) на цель осуществляется наводчиком с помощью прицельной марки. Данный способ позволяет получить точность наведения линии визирования ОП с ошибками порядка 3-4 мрад.
Наиболее близким к заявляемому способу является способ, реализованный в боевых машинах (БМ) комплексов "Тунгуска", "Тунгуска М", "Тунгуска Ml" (2,3).
В БМ комплексов типа "Тунгуска" реализована идея объединения двух видов вооружения ракетного и пушечного в одной БМ, а также реализованы два режима сопровождения цели: радиолокационный и оптический с возможностью перехода с режима на режим, с использованием взаимного подслеживания по угловым координатам ОП и антенны РЛС сопровождения. Радиолокационный режим автоматический и осуществляется РЛС сопровождения цели по трем координатам (ε,β,Д). Оптический же режим предусматривает наведение ОП на цель наводчиком только по угловым координатам (ε,β,) и осуществляется с помощью датчика команд (ДК). ДК представляет собой электронно-механическое устройство, состоящее из кнюппеля (поворотное устройство), шарнирно связанного с датчиками углового положения ОП. Наводчик, перемещая кнюппель, задает скорость наведения ОП по угловым координатам в зависимости от выбранного вида вооружения, и с помощью светящихся марок (окружностей), имеющихся в окуляре ОП, наводит линию визирования ОП на цель. Наведение осуществляется грубо, путем совмещения с целью большой марки диаметром 3 мрад. и точно - путем совмещения малой марки диаметром 0,5 мрад. При этом ошибки наведения при стрельбе ПВ идентичны ошибкам наведения ЗСУ "Гепард" и составляют также 3-4 мрад. Для стрельбы ЗУР такие ошибки недопустимы и должны быть как минимум на порядок меньше. С целью уменьшения ошибок наведения было введено устройство, позволяющее наводчику наводить ОП на цель с разными скоростями - для ПВ-300/с и РВ-100/с, а также запоминание текущих скоростей наведения, задаваемых наводчиком. Такой способ наведения позволил уменьшить ошибки до 0,3-0,4 мрад. Однако ошибки наведения в данном случае полностью зависят от личных качеств человека-наводчика, его психофизического состояния и профессиональной подготовленности. В процессе полигонных испытаний БМ комплексов типа "Тунгуска" и эксплуатации в войсках была экспериментально установлена зависимость точности наведения ОП от профессиональной подготовленности наводчика. Точность наведения составила при средней квалификации наводчика 0,4-0,6 мрад при высокой квалификации 0,2-0,3 мрад.
Задачей предлагаемого изобретения является повышение точности наведения ОП на цель и эффективности боевой машины в целом за счет уменьшения влияния уровня профессиональной подготовленности наводчика.
Поставленная задача решается тем, что в способе наведения оптического прицела на цель, включающего обнаружение, автоматическое сопровождение цели РЛС сопровождения, взаимное подслеживание ОП и антенны РЛС сопровождения, наведение и сопровождение цели ОП по угловым координатам, новым является то, что наведение и сопровождение ОП осуществляется путем подслеживания за скоростным изменением угловых координат цели, сопровождаемой РЛС, для чего повышают плавность привода наведения и стабилизации антенны РЛС сопровождения, вычисляют скорости изменения угловых координат цели, по которым вырабатывают сигналы подслеживания, уменьшают скорость изменения задаваемых управляющих сигналов, затем управляющие сигналы суммируют с сигналами подслеживания, а суммарный сигнал отрабатывают приводом наведения и стабилизации оптического прицела.
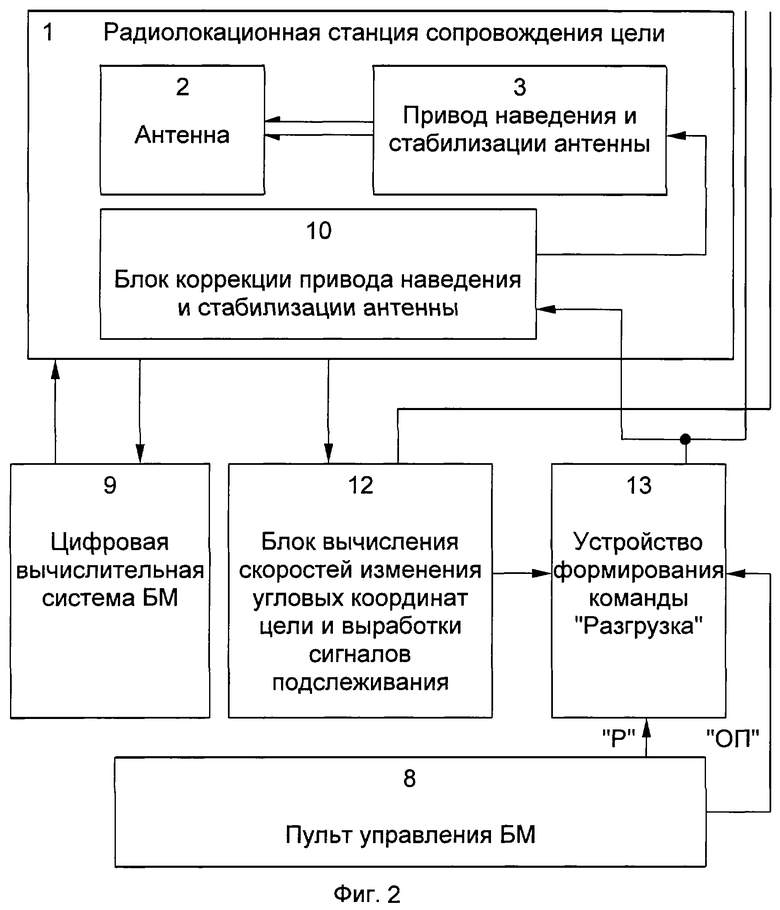
Данный способ реализован за счет того, что в боевую машину, содержащую башенную установку с пушечным и ракетным вооружением, РЛС обнаружения цели, РЛС сопровождения цели 1 с антенной 2 и приводом наведения и стабилизации антенны 3, оптический канал наведения 4 с оптическим прицелом 5, датчиком команд 6 и приводом наведения и стабилизации ОП 7, пульт управления БМ 8 и цифровую вычислительную систему БМ 9 введены блок коррекции привода наведения и стабилизации антенны 10, блок преобразования сигналов управления 11, блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12, устройство формирования команды "Разгрузка" 13 и сумматор 14, при этом выход РЛС сопровождения 1 соединен с входом блока вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12, первый выход которого соединен с первым входом сумматора, а второй - с первым входом устройства формирования команды "Разгрузка" 13, второй и третий входы которого соединены с выходами пульта управления БМ 8, выход устройства выработки команды "Разгрузка" соединен с входом блока коррекции привода наведения и стабилизации антенны 10, выход которого подключен к входу привода наведения и стабилизации антенны 3, выход устройства выработки команды "Разгрузка" 13 соединен также с первым входом блока преобразования сигналов управления 11, второй вход которого соединен с выходом датчика команд 6, а выход - со вторым входом сумматора, выход которого соединен с входом привода наведения и стабилизации оптического прицела.
На фиг. 1,2 приведена блок-схема устройства для осуществления способа наведения ОП на цель.
Блок коррекции привода наведения и стабилизации антенны с переключателем структуры привода представляет собой электронное устройство, позволяющее повышать плавность сопровождения цели и снизить в 1,7-2,0 раза среднеквадратические ошибки определения координат цели за счет сужения полосы пропускания привода наведения и стабилизации антенны 3.
Блок преобразования сигналов управления с переключателем скоростей наведения представляет собой электронное устройство, обеспечивающее соответствующий коэффициент передачи сигналов управления в зависимости от угла, скорости и ускорения кнюппеля датчика команд 6.
Блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12, устройство формирования команды "Разгрузка" 13 и сумматор 14 выполнены на элементах вычислительной техники и выполняют соответствующие им функции.
Процесс наведения оптического прицела на цель происходит следующим образом: РЛС обнаружения целей осуществляет круговой обзор пространства и при появлении "чужой" цели (отметки) на экране кругового обзора, оператор РЛС совмещает маркер целеуказания с отметкой от цели, при этом в ЦВС БМ поступают сигналы, пропорциональные азимуту (β) и дальности (Д) до цели, которые затем поступают на привод наведения и стабилизации антенны 3 и дальномер РЛС сопровождения цели 1, после чего РЛС сопровождения цели 1 производит допоиск цели по углу места (ε) и берет цель на автосопровождение по трем координатам (ε,β,Д), при этом координаты цели (ε,β,Д) поступают в цифровую вычислительную систему БМ 9, где они используются для выработки команд управления ЗУР. При входе цели в зону поражения ЗУР с пульта управления БМ 8 на устройство формирований команды "Разгрузка" поступает команда "Р".
Одновременно координаты цели ε,β,Д из РЛС сопровождения цели 1 поступают в блок вычисления скоростей изменения угловых координат цели и выработки сигналов подслеживания 12. Из блока 12 скоростные сигналы подслеживания ε,β поступают на устройство формирования команды "Разгрузка" 13 и через сумматор 14 на вход привода наведения и стабилизации ОП 7, который отрабатывает их, тем самым осуществляется автоматическое подслеживание ОП 5 за скоростным изменением угловых координат цели. С этого момента ОП автоматически сопровождает цель с шумами в сигналах подслеживания, пропорциональными шумам в координатах цели. РЛС 1 продолжает автоматически сопровождать цель, а наводчик через окуляр ОП 5 пытается обнаружить цель и в случае ее обнаружения, с пульта управления БМ 8 выдается команда "ОП", которая поступает на вход устройства формирования команды "Разгрузка" 13. При наличии на входах устройства формирования команды "Разгрузка" сигналов подслеживания ε,β и команд "Р" и "ОП" вырабатывается команда "Разгрузка", которая поступает в блок коррекции привода наведения и стабилизации 10 на переключатель структуры привода, который срабатывает и подключает блок 10 к приводу наведения и стабилизации антенны 3, при этом изменяется структура привода наведения и стабилизации антенны 3, повышаются плавность и точность сопровождения цели, за счет сужения полосы пропускания привода наведения и стабилизации антенны 3 и уменьшения уровня шумов в угловых координатах цели, что в свою очередь уменьшает ошибки в вычислениях текущих угловых скоростей сигналов подслеживания ОП 5 до 0,08-0,1 мрад. Команда "Разгрузка" поступает также в блок преобразования сигналов управления 11 на переключатель скоростей управления, который срабатывает и подключает блок 11 к датчику команд 6 и уменьшает скорость изменения сигналов управления с ДК 6 до 20/с. В сумматоре 14 сигналы управления суммируются с сигналами подслеживания и затем суммарный сигнал поступает на вход привода наведения и стабилизации ОП 5. Цель плавно сопровождается РЛС 1, а наводчик продолжает визуально наблюдать цель в окуляр ОП 5 и при необходимости совмещать малую марку с целью. Рассогласование между малой маркой и целью возможно из-за накапливающихся небольших ошибок в сигналах подслеживания и ошибок разъюстировки оптической и электрической осей ОП 5 и антенны 2 РЛС 1. Для компенсации этих рассогласований не требуется больших скоростей, поэтому можно снизить скорость наведения ОП 5 до 0,50/с независимо от применяемого вида вооружения. Дальнейшее участие наводчика в процессе наведения сводится к визуальному наблюдению подслеживания ОП 5 за целью, сопровождаемую РЛС 1, при этом малая марка и цель практически неподвижны и в случае "сползания" малой марки с цели наводчик плавно "набрасывает" ее на цель. Цель устойчиво сопровождается оптическим прибором, вплоть до ее поражения.
Таким образом, использование предлагаемого технического решения позволяет весь процесс наведения оптического прицела приблизить к автоматическому наведению как бы на неподвижную цель, что упрощает процесс наведения и позволяет уменьшить ошибки наведения наводчика до 0,1-0,15 мрад, а следовательно, и повысить эффективность боевого использования вооружения БМ.
На предлагаемый способ наведения оптического прицела на цель и устройство для его осуществления разработана техническая документация, изготовлены блоки и устройства, которые в составе БМ комплекса "Тунгуска Ml" прошли полигонные и Государственные испытания и в настоящее время решается вопрос о принятии комплекса "Тунгуска Ml" на вооружение Российской Армии.
Источники информации:
1. Jane's Land-Based Air Defence, 1997-98 гг., pp.57-59, 116-120 - аналог.
2. Специализированный оружейный журнал "Ружье, оружие и амуниция" 6, 1999 г., стр.51-55.
Издатель 000 "Издательский Дом "Петербургский" - аналог.
3. Патент 2135924 от 27.08.1999 г., Россия - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 1999 |
|
RU2156943C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ И ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2549552C2 |
Изобретение относится к вооружению и может быть использовано в войсках противовоздушной обороны. Технический результат - повышение точности наведения оптического прицела (ОП) на цель и уменьшение зависимости эффективности боевой машины от уровня профессиональной подготовленности наводчика. Сущность способа наведения оптического прицела на цель заключается в том, что в способе, включающем обнаружение, автоматическое сопровождение цели радиолокационной станцией (РЛС) сопровождения, взаимное подслеживание ОП и антенны РЛС сопровождения, наведение и сопровождение цели ОП по угловым координатам, наведение и сопровождение ОП осуществляют путем подслеживания за скоростным изменением угловых координат цели, сопровождаемой РЛС, для чего повышают плавность привода наведения и стабилизации антенны РЛС сопровождения, вычисляют скорости изменения угловых координат цели, по которым вырабатывают сигналы подслеживания, уменьшают скорость изменения задаваемых управляющих сигналов, затем управляющие сигналы суммируют с сигналами подслеживания, а суммарный сигнал отрабатывают приводом наведения и стабилизации оптического прицела. 2 ил.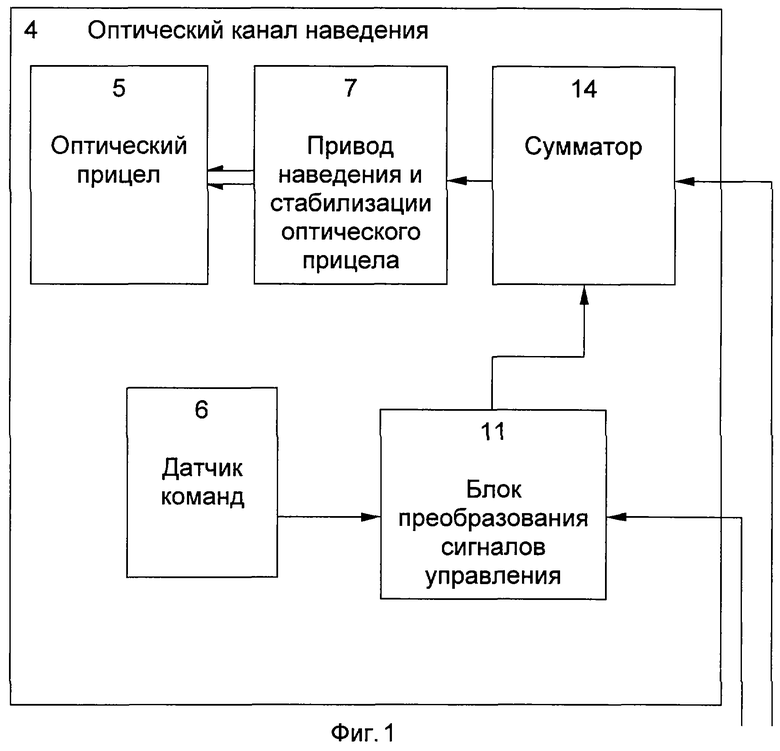
Способ наведения оптического прицела (ОП) на цель, включающий обнаружение, автоматическое сопровождение цели радиолокационной станцией (РЛС) сопровождения, взаимное подслеживание ОП и антенны РЛС сопровождения, наведение и сопровождение цели ОП по угловым координатам, отличающийся тем, что наведение и сопровождение ОП осуществляют путем подслеживания за скоростным изменением угловых координат цели, сопровождаемой РЛС, для чего повышают плавность привода наведения и стабилизации антенны РЛС сопровождения, вычисляют скорости изменения угловых координат цели, по которым вырабатывают сигналы подслеживания, уменьшают скорость изменения задаваемых управляющих сигналов, затем управляющие сигналы суммируют с сигналами подслеживания, а суммарный сигнал отрабатывают приводом наведения и стабилизации оптического прицела.
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| US 4406429, 27.09.1983 | |||
| DE 3422232 А1, 19.12.1985. | |||

