Изобретение относится к области вооружения и может быть использовано в войсках противовоздушной обороны.
В настоящее время НАТО располагает большим арсеналом средств воздушного нападения (СВН), малоразмерных беспилотных и пилотируемых, способных нести значительную боевую нагрузку. Реализуемая программа развития СВН, оснащенных новейшей радиоэлектронной аппаратурой разведки, подавления, пуска и наведения бортового оружия, создания дистанционно-пилотируемых летательных аппаратов с системами наведения, обеспечивающими применение днем и ночью в сложных метеоусловиях, предъявляют постоянно растущие требования к средствам ПВО.
Известны зарубежные пушечные комплексы типа "Гепард" (Германия), а также ракетные комплексы типа "Роланд" (Германия, Франция) с радиолокационными и оптическими каналами сопровождения цели и визирования ракеты. Основным недостатком этих комплексов является то, что они имеют только один вид вооружения, а для эффективной борьбы с массированными налетами СВН необходимы как пушечные, так и ракетные комплексы, что увеличивает количество этих комплексов, а следовательно, и их дороговизну [1].
Известен также отечественный комплекс "Тунгуска". В боевой машине (БМ) комплекса "Тунгуска" реализована идея объединения двух видов вооружения ракетного и пушечного при единой системе управления БМ. Комплекс "Тунгуска" и его модификация "Тунгуска-М", находятся на вооружении Российской Армии. Наиболее близкой по технической сущности к заявленному изобретению является БМ комплекса "Тунгуска-М" [2].
БМ комплекса "Тунгуска-М" содержит самоходное шасси, башенную установку с пушечным и ракетным вооружением, с приводами вооружения, радиолокационной станцией (РЛС) обнаружения целей, РЛС сопровождения целей см-диапазона, оптическим прицелом с приводами наведения и стабилизации, оптико-электронной аппаратурой выделения координат зенитной управляемой ракеты (ЗУР) и цифровой вычислительной системой (ЦВС).
Недостатком БМ комплекса "Тунгуска-М" является ограничение боевого применения ракетного вооружения (РВ) в условиях плохой видимости (туман, задымленность, облачность).
Задачей предлагаемого изобретения является расширение условий боевого применения РВ, а также повышение надежности визирования ЗУР как на участке захвата и вывода, так и на участке наведения ЗУР на цель.
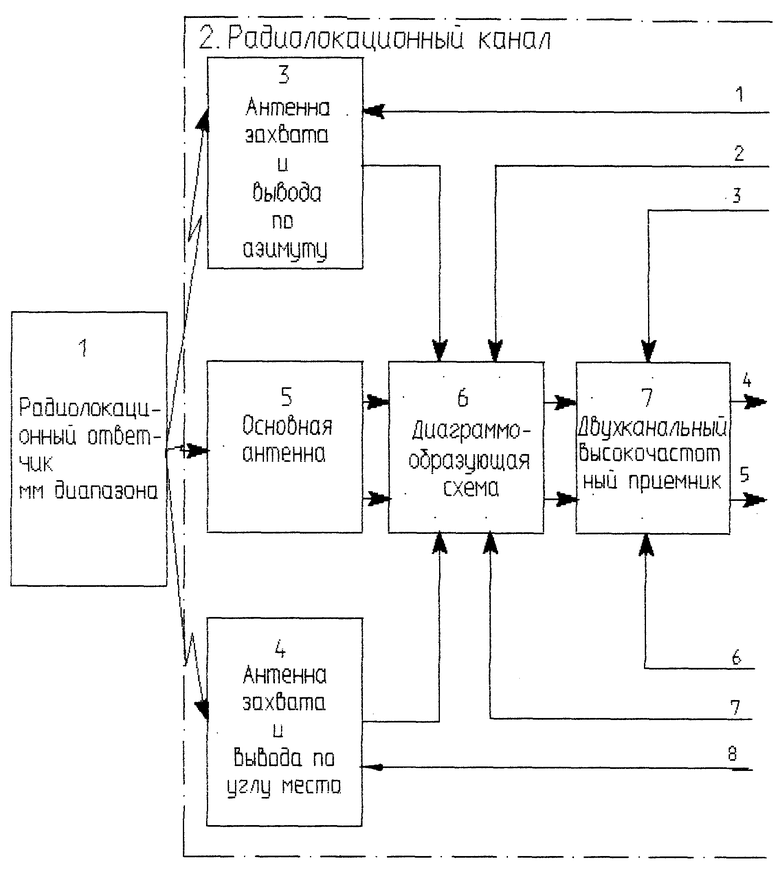
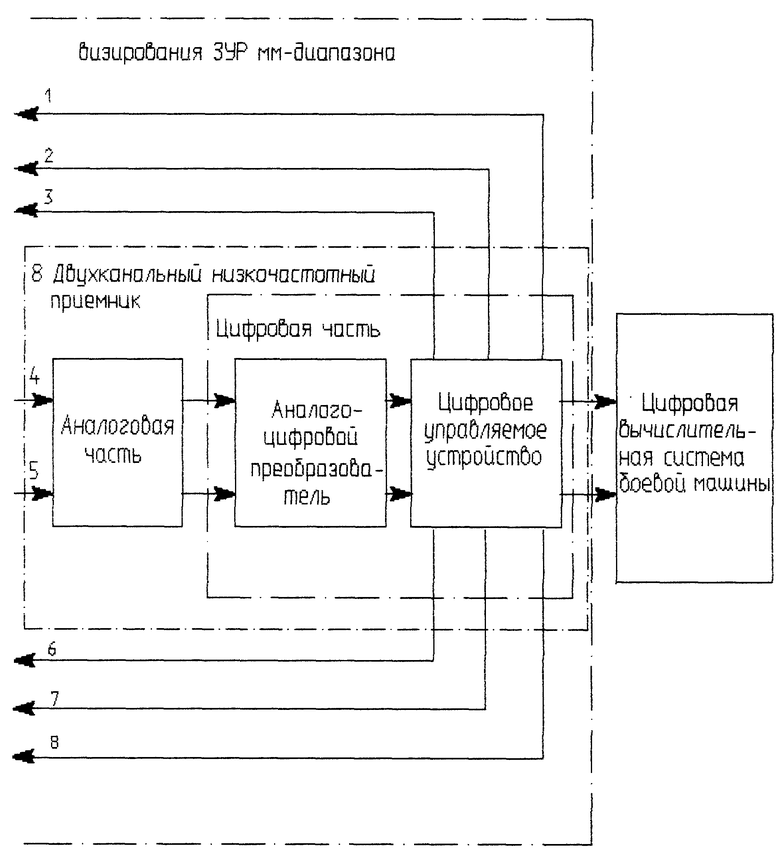
Поставленная задача достигается тем, что в БМ, содержащую башенную установку с пушечным и ракетным вооружением, с РЛС обнаружения целей, РЛС сопровождения цели см-диапазона с антенной колонкой с приводами наведения и стабилизации, с оптико-электронной аппаратурой визирования ЗУР, состоящей из устройства съема координат и блока выделения координат ЗУР и с цифровой вычислительной системой введены радиолокационный ответчик 1 мм-диапазона и радиолокационный канал 2 визирования ЗУР мм-диапазона, состоящий из антенн захвата и вывода по азимуту 3 и углу места 4, основной антенны 5, диаграммообразующей схемы 6, двухканального высокочастотного приемника 7 и двухканального низкочастотного приемника 8, выход которого соединен с входом цифровой вычислительной системы боевой машины, при этом радиолокационный ответчик 1 мм-диапазона установлен на ЗУР, а антенны захвата и вывода по азимуту 3 и углу места 4, основная антенна 5, диаграммообразующая схема 6, двухканальный высокочастотный приемник 7 размещены на антенной колонке РЛС сопровождения см-диапазона, а двухканальный низкочастотный приемник 8 - в башенной установке.
Радиолокационный ответчик 1 мм-диапазона предназначен для формирования импульсных высокочастотных (СВЧ) сигналов. Радиолокационный ответчик 1 мм-диапазона состоит из магнетрона, модулятора, переключателя литерных частот и антенны. Переключатель литерных частот предназначен для установки на ЗУР необходимой литерной частоты путем механического изменения объема резонаторной камеры магнетрона. С каждым приходом тактовых импульсов команд управления электронная аппаратура ЗУР выдает импульсы постоянного тока на модулятор, где они усиливаются и преобразовываются в импульсы до уровня, достаточного для запуска магнетрона, который формирует СВЧ-сигналы, передаваемые антенной в направлении БМ.
Для приема СВЧ-сигналов радиолокационного ответчика 1 мм-диапазона в антенную колонку РЛС сопровождения цели см-диапазона введены двухдиапазонный рефлектор и контррефлектор, а также моноимпульсный трехканальный рупорный облучатель мм-диапазона, который размещен в точке фокуса антенной системы.
Поляризатор электромагнитных волн рефлектора и контррефлектора выбран из условия поворота плоскости поляризации см-диапазона волн на 90 град. и неизменности поляризации мм-диапазона волн. Толщина поляризационного слоя выбирается из условия минимизации потерь в см- и мм-диапазонах волн. Моноимпульсный трехканальный рупорный облучатель крепится к кольцу контррефлектора и имеет элементы регулировок для согласования электрических осей. Антенны захвата и вывода по азимуту (АЗВ-β) 3 и углу места (АЗВ-ε) 4 крепятся к рефлектору и располагаются взаимно перпендикулярно под углом относительно электрических осей целевого и ракетного каналов с целью ориентирования диаграмм направленности (ДН) на центр группирования ЗУР.
Структурная схема радиолокационного канала визирования ЗУР мм-диапазона приведена на чертеже.
Радиолокационный канал визирования ЗУР мм-диапазона имеет два режима пеленгации: режим захвата и вывода и режим пеленгации ЗУР на участке наведения на цель. В режиме пеленгации на участке наведения ЗУР на цель применен квазимоноимпульсный метод, а в режиме захвата и вывода - интерферометрический с использованием двух антенных систем - по азимуту (β) и углу места (ε).
При стрельбе по цели ЗУР существует так называемая "трубка рассеивания" ЗУР. Поэтому каждая антенна как по β, так и по ε в режиме захвата должна иметь широкую ДН, перекрывающую "трубку рассеивания", а на этапе вывода последовательно переходить к более узким ДН. Для этого в АЗВ-β 3, АЗВ-ε 4 встроены линейки из четырех рупорных антенн, которые управляются диаграммообразующей схемой (ДОС-1), содержащей два коммутатора, которые переключают базы рупорных антенн, мост и два фазовращателя. ДОС-1 обеспечивает последовательное формирование суммарных (Σ), разностных (Δ) и комбинированных сигналов (Σ+jΔ) соответственно по β и ε путем поочередного подключения одной из трех пар рупорных антенн, разнесенных на необходимые расстояния. Сформированные в АЗВ-β 3 и АЗВ-ε 4 суммарные, разностные и комбинированные сигналы по β и ε поступают на диаграммообразующую схему 6 (ДОС-2).
Отличительной особенностью этого режима является то, что цель непрерывно сопровождается основным лепестком РЛС см-диапазона, а команды управления ЗУР передаются боковыми лепестками, при этом обеспечивается необходимая плотность потока мощности на борту ЗУР, так как ЗУР находится вблизи БМ.
После вывода ЗУР в основной лепесток РЛС сопровождения цели см-диапазона осуществляется режим пеленгации ЗУР на участке наведения на цель. Принимаемая энергия от радиолокационного ответчика 1 фокусируется рефлектором и направляется в моноимпульсный трехканальный рупорный облучатель. Если направление на ЗУР совпадает с направлением оси антенны, то плоскость фазового фронта сигнала оказывается параллельной плоскости раскрыва параболического зеркала (рефлектора) и плоскости раскрыва моноимпульсного трехканального рупорного облучателя. Вследствие этого принимаемый антенной сигнал возбудит рупор моноимпульсного трехканального рупорного облучателя симметрично, что приведет к формированию суммарного (Σ) СВЧ-сигнала. При смещении ЗУР от электрической оси антенны фазовый фронт волны принимаемого сигнала оказывается наклонным относительно раскрыва параболического зеркала (рефлектора), вследствие чего в раскрыве моноимпульсного трехканального рупорного облучателя формируются разностные (Δβ, Δε) СВЧ-сигналы. Сформированные СВЧ-сигналы (Σ, Δβ, Δε) с выхода моноимпульсного трехканального рупорного облучателя поступают на диаграммообразующую схему (ДОС-2) 6. В состав ДОС-2 входят делитель мощности (ДМ) в суммарном канале (Σ), два Т-моста, каждый из которых своими входами подключен к одному из выходов ДМ и к одному из выходов разностных (Δβ и Δε) каналов моноимпульсного трехканального рупорного облучателя. Коммутаторы осуществляют поочередную передачу сигналов на вход азимутального (угломестного) канала высокочастотного приемника (ВП) 7. Таким образом ДОС-2 обеспечивает на этапе захвата и вывода ЗУР (при поступлении соответствующих команд управления) передачу СВЧ-сигналов с выхода АЗВ-β 3 и АЗВ-ε 4 на входы азимутального (угломестного) каналов ВП 7, а на этапе визирования ЗУР при наведении на цель - формирование суммарно-разностных ДН по β и ε и поочередную передачу СВЧ-сигналов на те же входы азимутального (угломестного) каналов ВП 7.
ВП 7 представляет собой двухканальный супергетеродинный приемник с двойным преобразованием частоты. В состав каждого канала ВП 7 входят последовательно соединенные СВЧ-аттенюатор, фильтр, преобразователь сигналов и усилитель сигналов первой промежуточной частоты, фильтр, преобразователь сигналов и усилитель сигналов второй промежуточной частоты. СВЧ-аттенюатор обеспечивает защиту входных цепей ВП от перегрузок помехой и расширение динамического диапазона входных сигналов. Фильтр первой промежуточной частоты осуществляет селекцию входных сигналов и подавление зеркального канала приема, фильтр второй промежуточной частоты обеспечивает заданное подавление побочного приема сигналов соседних литерных частот ЗУР. Общим для обоих каналов являются первый и второй гетеродины. Преобразованные и усиленные сигналы с выхода азимутального (угломестного) каналов ВП 7 поступают на соответствующий вход двухканального низкочастотного приемника (НП) 8.
НП обеспечивает обработку сигналов по промежуточной и видеочастоте, двухканальное аналого-цифровое преобразование видеосигналов, обработку полученной информации и выработку сигналов, пропорциональных угловым координатам ЗУР. НП 8 состоит из последовательно соединенных аналоговой части, предназначенной для усиления, регулирования, детектирования и согласованной фильтрации промежуточной частоты и цифровой части, предназначенной для преобразования импульсной аналоговой информации в цифровой код. Цифровая часть содержит аналого-цифровой преобразователь (АЦП) и цифровое управляемое устройство, которое предназначено для приема сигналов с АЦП, обработки полученной информации, расчета угловых координат ЗУР и формирования сигналов (по заложенным алгоритмам) управляющих работой коммутаторов и фазовращателей ДОС-1, коммутаторов диаграммообразующей схемы 6, СВЧ-аттенюаторов ВП 7. С выхода НП 8 сигналы, пропорциональные угловым координатам ЗУР, поступают на вход ЦВС БМ.
Реализация радиолокационного канала визирования ЗУР мм-диапазона позволяет осуществлять всепогодный режим визирования ЗУР при сохранении яснопогодного режима, то есть в БМ обеспечивается комбинированная система управления ЗУР.
При боевой работе ракетным вооружением в комбинированном режиме управления после обнаружения цели и выдачи целеуказания производится захват цели на автосопровождение РЛС см-диапазона. При входе цели в зону поражения РВ производится пуск ЗУР, после чего ЗУР попадает в диаграммы направленности антенн захвата и вывода по азимуту 3 и углу места 4 и в поле зрения устройства съема координат оптико-электронной аппаратуры визирования ЗУР, которые независимо друг от друга начинают следить за ЗУР, при этом координаты ЗУР непрерывно поступают в ЦВС БМ. В зависимости от выбранного режима (всепогодный или яснопогодный) ЦВС БМ определяет угловые отклонения ЗУР относительно линии визирования цели и вырабатывает соответствующие команды управления, передавая их в РЛС см-диапазона, где они кодируются и затем передаются на борт ЗУР. Аппаратура ЗУР обрабатывает команды управления и ЗУР выводится на линию визирования цели и удерживается на ней до поражения цели.
Таким образом, с введением в ЗУР радиолокационного ответчика мм-диапазона в состав БМ радиолокационного канала визирования ЗУР мм-диапазона обеспечивается комбинированная система управления ЗУР, что позволяет расширить условия боевого применения РВ и повысить надежность визирования ЗУР за счет дублирования режимов пеленгации.
На предлагаемое изобретение разработана техническая документация, изготовлены опытные образцы радиолокационного ответчика мм-диапазона, двухканальных высокочастотного и низкочастотного приемников и модернизирована РЛС сопровождения см-диапазона. В настоящее время производится сборка опытного образца БМ для проведения заводских испытаний.
Источники информации:
1. Аналоги. Jane's Land-Based Air Defence, 1997-98 гг., pp. 57-59, 116-120.
2. Прототип. Журнал "Техника и оружие", N 5, 1996 г., стр. 7-11. Издатель АО "Авиакосмос".
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 2015 |
|
RU2584404C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| Зенитная ракетно-пушечная боевая машина | 2016 |
|
RU2618663C1 |
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
| СПОСОБ НАВЕДЕНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА НА ЦЕЛЬ | 2001 |
|
RU2217681C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СПОСОБ ЗАХВАТА НА СОПРОВОЖДЕНИЕ ЗУР В РАДИОЛОКАЦИОННОЙ СТАНЦИИ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ И РАКЕТ | 2022 |
|
RU2799500C1 |
Изобретение относится к области вооружения и может быть использовано в войсках противовоздушной обороны. Изобретение позволяет расширить условия боевого применения ракетного вооружения, а также повысить надежность визирования защитной управляемой ракеты (ЗУР). Сущность изобретения заключается в том, что в зенитную ракетно-пушечную боевую машину введены радиолокационный ответчик мм-диапазона и радиолокационный канал визирования ЗУР мм-диапазона, состоящий из антенн захвата и вывода по азимуту и углу места, основной антенны, диаграммообразующей схемы, двухканального высокочастотного приемника и двухканального низкочастотного приемника, выход которого соединен с входом цифровой вычислительной системы. При этом радиолокационный ответчик мм-диапазона установлен на ЗУР, а антенны захвата и вывода по азимуту и углу места, основная антенна, диаграммообразующая схема, двухканальный высокочастотный приемник размещены на антенной колонке РЛС сопровождения цели см-диапазона, а двухканальный низкочастотный приемник - в башенной установке. 1 ил.
Зенитная ракетно-пушечная боевая машина, содержащая башенную установку с пушечным и ракетным вооружением, с радиолокационной станцией (РЛС) обнаружения целей, РЛС сопровождения цели см-диапазона с антенной колонкой и приводами наведения и стабилизации, с оптико-электронной аппаратурой визирования зенитной управляемой ракеты (ЗУР), состоящей из устройства съема координат и блока выделения координат ЗУР, и цифровой вычислительной системой, отличающаяся тем, что в нее введены: радиолокационный ответчик мм-диапазона, установленный на ЗУР, и радиолокационный канал визирования мм-диапазона, состоящий из антенн захвата и вывода по азимуту и углу места, основной антенны, диаграммообразующей схемы, двухканального высокочастотного приемника, установленных на антенной колонке, и двухканального низкочастотного приемника, размещенного в башенной установке, при этом радиолокационный ответчик мм-диапазона путем передачи высокочастотных сигналов связан со входами антенн захвата и вывода по азимуту и углу места и входом основной антенны, выходы антенн соединены с входами диаграммообразующей схемы, выходы которой подключены к азимутальному и вертикальному входам двухканального высокочастотного приемника, выходы которого соответственно соединены с азимутальным и вертикальным входами двухканального низкочастотного приемника, состоящего из последовательно соединенных аналоговой части, аналого-цифрового преобразователя и цифрового управляемого устройства, выходы которого соединены с управляющими входами антенн захвата и вывода по азимуту и углу места, диаграммообразующей схемы и двухканального высокочастотного приемника, а выход двухканального низкочастотного приемника соединен с входом цифровой вычислительной системы боевой машины.
| Техника и вооружение, 1996, N5, с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ПИВА | 1996 |
|
RU2103341C1 |
| GB 1568915 A, 11.06.1980 | |||
| US 5042743 A, 27.08.1991 | |||
| US 5197691 A, 30.03.1993 | |||
| US 4406429, 27.09.1983 | |||
| ПРИМЕНЕНИЕ СОСТАВНЫХ ЦЕПОЧЕК ПРЕОБРАЗОВАНИЙ ДЛЯ МНОЖЕСТВА УСТРОЙСТВ | 2015 |
|
RU2697625C2 |
| МОНИТОРИНГ ОБЪЕКТОВ, СОДЕРЖАЩИХ ПЕРЕКЛЮЧАЕМЫЕ ОПТИЧЕСКИЕ УСТРОЙСТВА И КОНТРОЛЛЕРЫ | 2015 |
|
RU2684751C2 |
| DE 3034838 C1, 29.11.1990. | |||

