Изобретение относится к области транспортных средств - амфибиям, используемым для выполнения транспортных работ на разных поверхностях движения (грунт, болото, вода).
Известен аналог транспортного средства (ТС), содержащий герметичный корпус, включающий в себя три секции, которые соединяются между собой торцевыми полыми элементами с возможностью поворота крайних секций относительно средней на 180° от привода и снабжены фиксаторами их относительного положения, моторную установку, агрегаты трансмиссий, связанные с колесными движителями и водяной движитель [1].
К недостаткам аналога следует отнести сложность конструкции корпуса, который необходимо перекомпоновывать для движения по воде, что предусматривает подвижные уплотнения, поскольку передняя и задняя части корпуса поворачиваются относительно средней секции на 180°, что конструктивно трудно выполнимо с учетом размещения внутри него силовой установки и агрегатов трансмиссии, связанных с колесными движителями.
Наиболее близким к предлагаемому изобретению по технической сущности следует отнести транспортное средство, включающее водоизмещающий корпус, гусеничный движитель с блокировочными устройствами средних и задних опорных катков, водоотражательный щит, передний гидродинамический щиток, кормовую гидродинамическую решетку, изолирующий кожух, бортовую гидродинамическую решетку [2].
К недостаткам этого транспортного средства следует отнести низкий КПД движителя, особенно при движении по воде, а также необходимость установления гидродинамических щитков, блокировочных устройств, усложняющих конструкцию шасси, и, как следствие, снижение надежности работы движителя и увеличение стоимости изделия.
Техническим результатом изобретения является создание универсального транспортного средства за счет применения бестрансмиссионной системы с индивидуальным приводом опорных колес перекатывающегося типа, реализующих схему подведения силового потока с “отрицательным” трением и принудительной синхронизацией (эффект захватывания), гребных водоходных колес и вентиляторов нагнетателей, создающих совместно с корпусом ТС воздушную подушку, комплексное применение которых позволяет достигнуть высокого общего КПД транспортного средства и эффективности его работы на разных поверхностях движения (грунт, болото, вода).
Это достигается тем, что транспортное средство, содержащее водоизмещающий корпус типа “тримаран”, в днищевой части которого выполнен перегиб с двумя щелевидными отверстиями, разделенными килевой балкой (килем) для выхода воздуха от вентиляторов- нагнетателей, создающих в подднищевом пространстве воздушную подушку, а колесный движитель перекатывающегося типа, включающий в себя опорно-приводное устройство [3], выполненное в виде цилиндрического корпуса, на внешней поверхности которого установлены упругие элементы с возможностью поворачиваться на величину угла выкатывания (из колеи) колеса, образуя при этом совместно с внутренним зацеплением опорно-приводного устройства механизм с тремя степенями свободы, реализующим схему перекатывания с “отрицательным” трением, а при движении по воде при необходимости может осуществляться принудительная синхронизация или эффект “захватывания” ободов колес (схема фиг.7).
Схема с индивидуальным приводом колес перекатывающегося типа и гребных колес водоходного движителя позволяет снизить массу ТС, компоновать движители исходя из соображений минимизации циркуляции “паразитной” мощности, а также повысить надежность, долговечность и общий КПД.
Сущность изобретения заключается в том, что предлагаемая конструкция транспортного средства позволяет эффективно использовать его на разных поверхностях движения за счет применения движителя перекатывающегося типа, водоходного движителя, а также вентиляторов-нагнетателей, создающих воздушную подушку в подднищевом пространстве и имеющих возможность настраиваться на максимальный КПД при их совместной и раздельной работе.
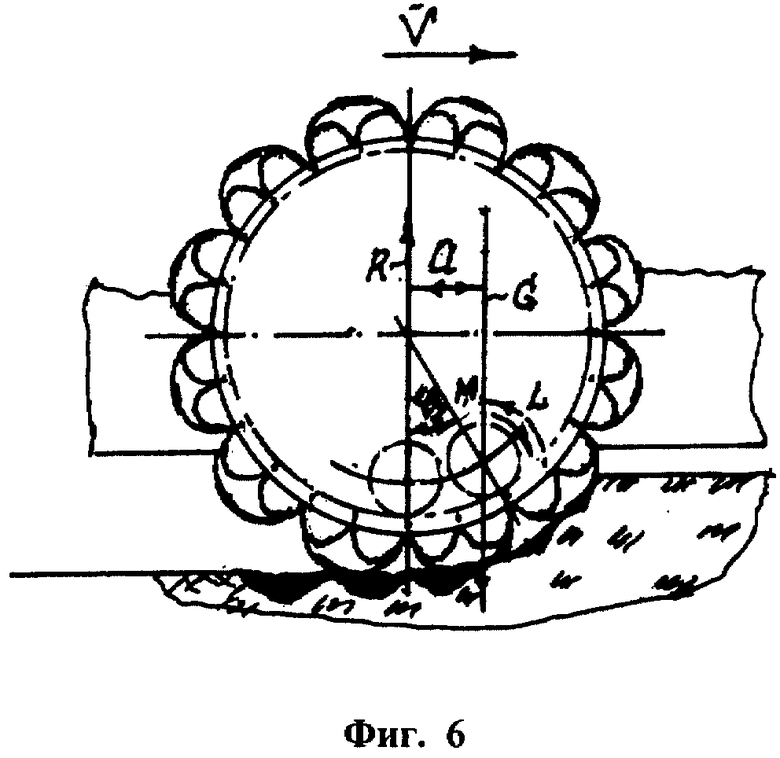
На фиг.1. представлен общий вид транспортного средства с изображением нагнетательной камеры и вентиляторов; на фиг.2 - разрез А-А колеса перекатывающегося типа, на фиг.3 - разрез гребного колеса водоходного движителя; на фиг.4 - вид слева гребного колеса с изображением устройства его вертикального перемещения; на фиг.5 - схема работы колеса перекатывающегося типа на воде в режиме “захватывания”; на фиг.6 - схема работы колеса перекатывающегося типа на грунте.
Транспортное средство (фиг.1) содержит корпус 1, в носовой части которого выполнены две нагнетательные камеры 2 с вентиляторами 3, днищевая часть корпуса имеет перегиб с двумя щелевидными отверстиями 4 для выхода потоков воздуха от вентиляторов, создающих в подднищевом пространстве воздушную подушку.
По бортам транспортного средства, в нижней его части, крепятся колеса 5. Обод 6 колес 5 состоит из двух типов упругих элементов 7 и поддерживающих 8, которые своими проушинами устанавливаются в поперечных пазах круглой формы, выполненных на внешней поверхности цилиндрического корпуса 11 фиг.2 и соединенных с ним пальцами 9, образуют кинематическую пару первого рода - цилиндрический шарнир, позволяющий осуществлять их относительное движение (поворот на угол ϕ/2), образуя при этом механизм с тремя степенями свободы. Это дает возможность хорошо адаптироваться ободу 6 к изменяющимся условиям движения.
Упругие элементы 8, располагаясь под опорными элементами 7 (фиг.1, 6) (внутри внешнего обода), с одной стороны, являются поддерживающими элементами внешнего обода (элементов 7), а с другой стороны, - увеличивающими его жесткость и гасящими колебания корпуса при наезде на препятствия. Упругие элементы 8 крепятся в пазах круглой формы, на внешней поверхности цилиндрического корпуса 11, аналогично элементам 7.
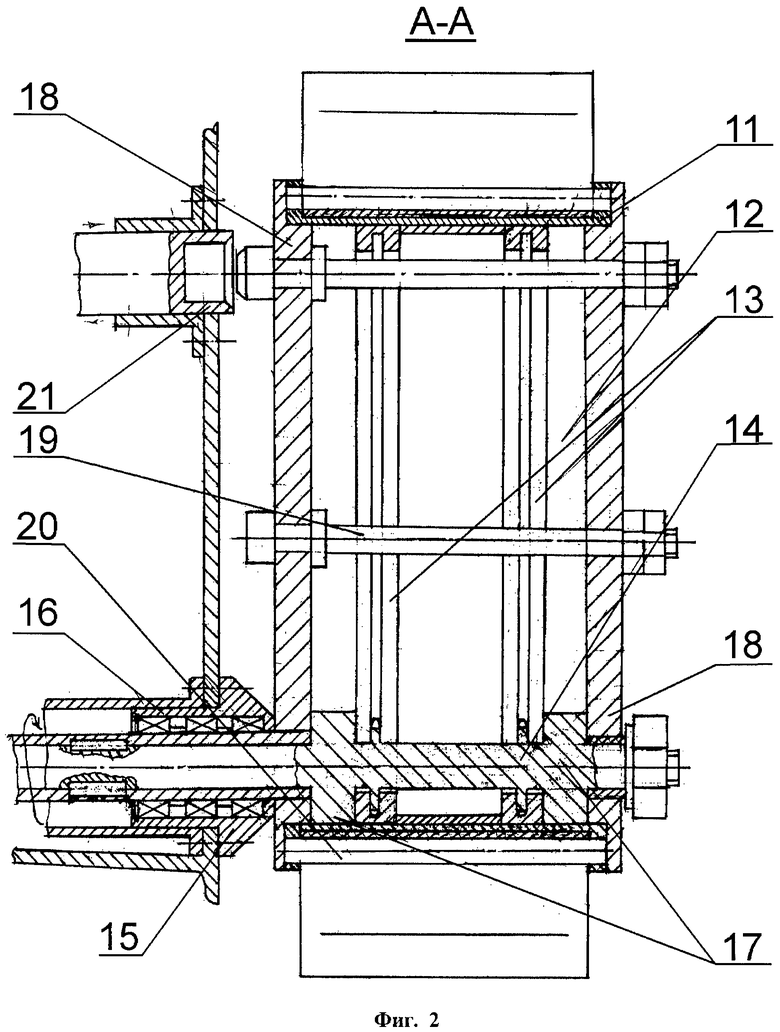
Реборды 10 являются конструктивными элементами цилиндрического корпуса 11, в том числе опорно-приводного устройства 12 (фиг.2), во внутренней поверхности которого закреплены зубчатые колеса 13, образующие совместно с вал-шестерней 14, установленной в опорах 15 корпуса ТС 1, шестеренчатое зацепление, реализующее крутящий момент мотор-редуктора 16. Опорные ролики 17, установленные на вал-шестерне 14, поддерживают корпус ТС и осуществляют смещение центра масс (мгновенных центров давления) - вперед - вверх (назад - вверх), реализуя схему перекатывания колеса с "отрицательным" трением, и вызывают поступательное движение ТС путем накопления уровня полной механической энергии до величины сопротивления перекатыванию равную опрокидывающему моменту Мопр.
Боковые крышки 18 (фиг.2), соединенные между собой шпильками 19, обеспечивают устойчивость внутреннего зацепления опорно-приводного устройства 12 при больших углах обкатывания опорных роликов 17 вал-шестерни 14, а также верхними поясками фиксируют оси 20, удерживающие упругие элементы 7 и 8 обода 6 от выпадения, обеспечивают жесткость конструкции подвижной части опорно-приводного устройства при поворотах ТС и защищают внутреннюю полость зацепления от попадания посторонних предметов при движении.
Конец верхней шпильки 19, обращенный к борту ТС, выполнен в виде цилиндра с фаской, который входит в выдвижной захват 21, установленный в верхней части корпуса (фиг.2), и тем самым создается возможность изменения режима работы колеса.
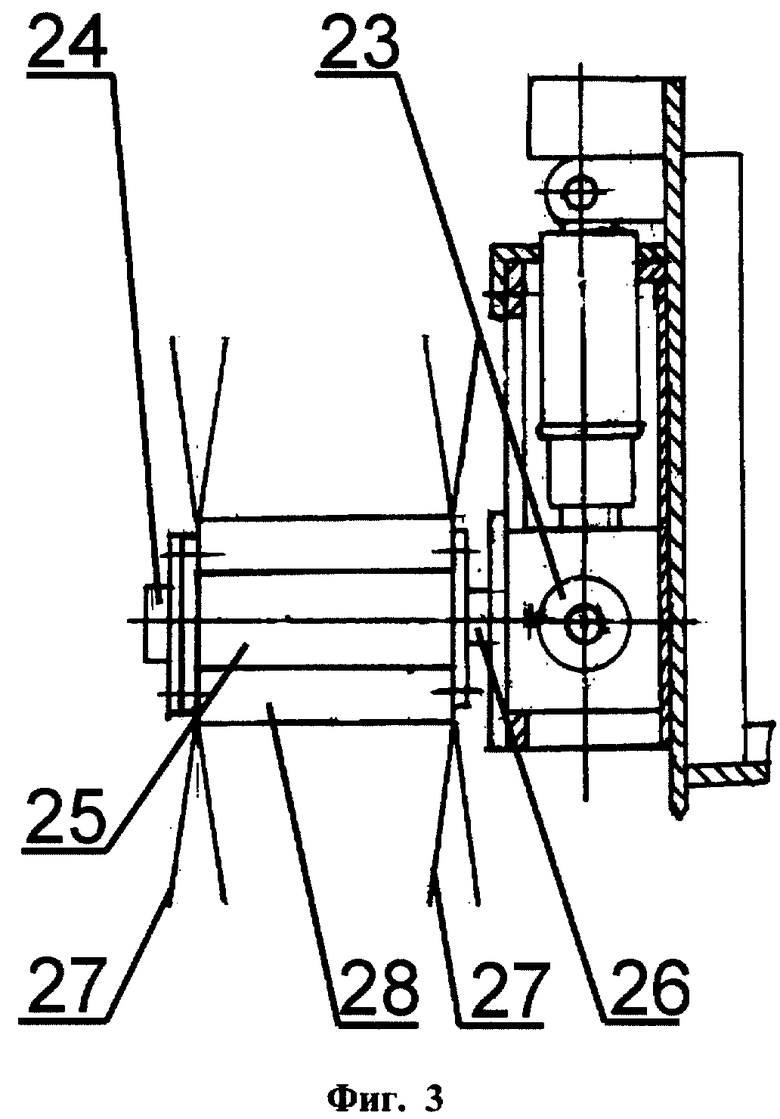
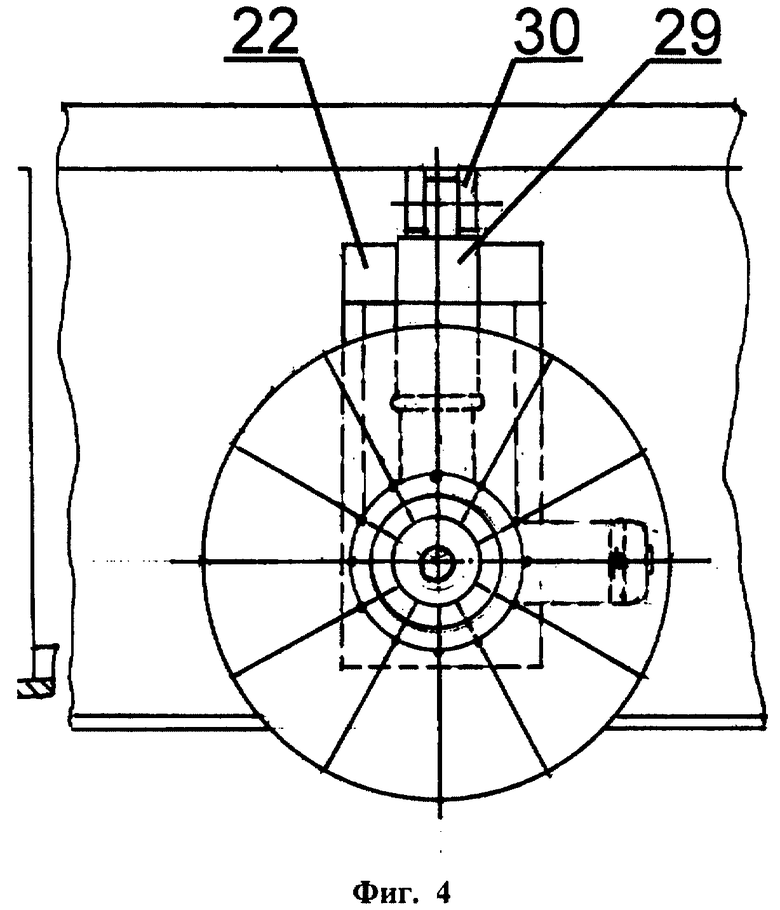
В промежутках между колесами перекатывающегося типа 5 устанавливаются вертикальные стойки 22 фиг.3, 4 с пазами, в которых вертикально перемещаются направляющие корпусов мотор-редукторов 23 гребных колес 24, водоходного движителя, содержащего цилиндрический корпус 25, установленный в подшипниках на валу 26. На внешней поверхности цилиндрического корпуса 25 внутри вентиляторных дисков 27 по периметру крепятся гребные лопатки 28.
Гребное колесо 24 вместе с мотор-редуктором 23 при помощи толкающего механизма 29, верхней проушиной прикрепленного к кронштейну 30, установленному на борту ТС, может вертикально перемещаться, настраиваясь на нужный режим работы в зависимости от поверхности движения (вода, болото).
Принципы и варианты работы транспортного средства могут быть представлены следующим образом.
Движение по грунту осуществляется путем подведения крутящего момента Мкр от мотор-редуктора 16 к опорно-приводному устройству 12 посредством вал-шестерни 14, опорные ролики 17, которые перекатываясь по внутренней поверхности опорно-приводного устройства 12 смещают центр масс вперед - вверх (назад - вверх). Создается опрокидывающий момент Мопр на ободе колеса, состоящего из упругих опорных элементов (схема, фиг.6) и образующих механическую систему с тремя степенями свободы, реализующую схему с “отрицательным” трением, суть которой состоит в следующем.
Величина подводимого крутящего момента Мкр и соответственно уровень расходуемой энергии на трение качения определяется коэффициентом трения b>0, который больше нуля и при этом дифференциальное уравнение движения имеет вид:
преобразование которого дает следующий результат:

откуда видно, что слева стоящие члены выражают изменение кинетической и потенциальной энергии системы (“каток - грунт”) за время τ. Поскольку b>0, то интеграл справа положителен и изменение полной энергии отрицательно, т.е. происходят затраты общей энергии на трение качения, что характерно для обычного вращающегося колеса, не обладающего свойством накапливания полной энергии.
В рассматриваемой конструкции движителя транспортного средства система обладает свойством накапливания полной энергии за счет смещения центра масс (мгновенного центра давления) вперед-вверх относительно устойчивого положения равновесия и, следовательно, мы имеем коэффициенты b<0 и h<0, где h=b/2m.
Тогда уравнение движения системы “каток - грунт” можно записать в виде:

где  - функция, характеризующая зависимость силы трения от относительной скорости u и является характеристикой трения.
- функция, характеризующая зависимость силы трения от относительной скорости u и является характеристикой трения.
При  значительно меньше v0 (большая скорость), разложив функцию F в ряд, получим уравнение движения, имеющее вид:
значительно меньше v0 (большая скорость), разложив функцию F в ряд, получим уравнение движения, имеющее вид:

где член после знака равенства обозначает только смещение системы от положения равновесия на величину F(ν0)/k в направлении движения колеса.
Коэффициент b+F'(ν0) при  и его знак определяет вид и характеристику трения и соответственно свойства контактирующих поверхностей.
и его знак определяет вид и характеристику трения и соответственно свойства контактирующих поверхностей.
Величина F'(ν0) представляет собой угол наклона характеристики трения для данного ν0, что для круто падающей характеристики (b+F'(ν0)<0), характерной для перекатывающегося колеса, представляет систему с “отрицательным” трением [уравнение (4)].
Таким образом, движение ТС по грунту, схема фиг.6, с учетом вышеизложенного осуществляется с высоким общим КПД.
Движение транспортного средства по болоту предполагает одновременное использование движителя перекатывающегося типа и водоходного движителя и, при необходимости, включаются вентиляторы-нагнетатели воздушной подушки.
Движение транспортного средства по болоту осуществляется с использованием как движителя перекатывающегося типа, так и водоходного движителя, настроенного по высоте и кинематическим параметрам. При необходимости могут включаться вентиляторы-нагнетатели, создающие воздушную подушку.
Движение по воде может осуществляться в разных режимах, в частности в водоизмещающем режиме обвод колесного движителя займет положение в соответствии со схемой фиг.5 и, при подведении крутящего момента, образует автоколебательную систему по типу маятника Фроуда. В случае достаточно малой разности между частотой вращения обвода и частотой вращения силового фактора (крутящего момента Мкр) устойчивое периодическое движение автоколебательной системы приобретает частоту внешнего силового фактора (Мкр). При этом наступает принудительная синхронизация или эффект захватывания, при котором обод колеса будет осуществлять движение в соответствии со схемой фиг.5.
Для осуществления движения транспортного средства в глиссирующем режиме обод колеса фиксируется верхним фиксатором-упором в верхнем положении, при этом мы получаем передачу с внутренним зацеплением. Движение осуществляется за счет вращения обода и работы вентиляторов-нагнетателей создающих воздушную подушку. При больших нагрузках в работу может включаться и водоходный движитель, однако здесь необходимо будет решать вопрос синхронизации их работы, включая в работу средства регулирования (датчики угловых скоростей, продольных сил и др.).
Рассмотренные выше конструктивные особенности исполнения, использующие принцип работы движителя перекатывающегося типа, эффект “отрицательного” трения, а при работе на воде эффект “захватывания”, обеспечивают высокую проходимость и эффективность работы ТС на разных поверхностях движения.
Движение по грунту, создаваемое опорно-приводным устройством с поворачивающимися опорными элементами, в значительной мере уменьшают отрицательное воздействие на почву (за счет практического отсутствия тангенциальной составляющей напряжения при формировании колеи), что с экологической точки зрения очень важно.
Экономическая эффективность достигается за счет снижения металлоемкости конструкции (бестрансмиссионная схема с индивидуальным приводом движителей) и применения движителя перекатывающегося типа с эффектом “отрицательного” трения при движении по грунту и эффекта “захватывания” при движении по воде, а также комплексного применения воздушной подушки, самонастраивающегося водоходного и движителя перекатывающегося типа.
Литературные источники
1. Авторское свидетельство СССР №1159806, кл. В 60 F 3/00, 1985.
2. Многоцелевые гусеничные шасси, В.В.Платонов, В.С.Кожевников и др. Под ред. В.Ф.Платонова. - М.: Машиностроение, 1998, 342 с.
3. Авторское свидетельство РФ №2038218, МПК В 60 В 19/00, ВК 17/32, 1995 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ПЛОСКОГО ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ КОЛЕСНОГО ДВИЖИТЕЛЯ ПЕРЕКАТЫВАЮЩЕГОСЯ ТИПА НАЗЕМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2465153C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ ПЕРЕКАТЫВАЮЩЕГОСЯ ТИПА | 2011 |
|
RU2467890C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038218C1 |
| Несамоходная грузовая платформа на воздушной подушке | 2022 |
|
RU2778330C1 |
| КОМБИНИРОВАННЫЙ АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 1998 |
|
RU2143982C1 |
| АМФИБИЯ-ТРАНСФОРМЕР "АКВА" | 2010 |
|
RU2448844C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 1991 |
|
RU2041094C1 |
| МАЛОГАБАРИТНЫЙ ГУСЕНИЧНЫЙ КАТЕР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2023 |
|
RU2836745C1 |
| ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ), ЭКРАНОПОЕЗД И НАПРАВЛЯЮЩАЯ ДЛЯ НЕЕ | 2010 |
|
RU2463182C2 |
| Движитель транспортного средства | 1990 |
|
SU1789404A1 |

Изобретение относится к транспорту и касается создания амфибийных транспортных средств. Транспортное средство имеет водоизмещающий корпус типа “тримаран”, колесный движитель и водоходный движитель. В носовой части корпуса расположены две нагнетательные камеры с вентиляторами. Поверхность днищевой части корпуса выполнена с перегибом, в котором выполнены два щелевидных отверстия, соединенных с нагнетательными камерами для выхода воздушных потоков, создаваемых вентиляторами и образующих воздушную подушку в подднищевом пространстве. Колесный движитель выполнен перекатывающегося типа с индвивидуальным приводом от мотор-редукторов. Колеса движителя выполнены в виде цилиндрического корпуса с ребордами, на внешней поверхности которого профрезерованы поперечные пазы круглой формы по числу поддерживающих и опорных гибких элементов обода, закрепленных пальцами в отверстиях реборд и имеющих возможность поворота на угол выкатывания, образуя при этом совместно с ободом колеса и внутренним зацеплением опорно-приводного устройства, которым снабжено транспортное средство, механизм с тремя степенями свободы, реализующий схему перекатывания с “отрицательным” трением, вызывающую поступательное движение транспортного средства за счет смещения центра масс транспортного средства вверх-вперед (назад-вверх). Опорно-приводное устройство может быть выполнено с крышками, соединенными между собой шпильками. Конец верхней шпильки может быть выполнен в виде цилиндра с возможностью его вхождения в выдвижной захват, установленный в верхней части корпуса транспортного средства на его борту для изменения режима работы колеса. Водоходный движитель может быть выполнен в виде гребных колес, установленных на вертикальных стойках с возможностью вертикального перемещения и содержащих цилиндрический корпус, установленный в подшипниках на оси, и гребные лопатки прямоугольной формы или со скосами для создания дополнительной силы тяги и повышения общего КПД при движении по воде и болоту. Технический результат реализации изобретения заключается в повышении эксплуатационных качеств амфибийного транспортного средства. 2 з.п. ф-лы, 6 ил.

| Тиристорный электропривод | 1988 |
|
SU1555792A1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038218C1 |

