Изобретение относится к области транспортного машиностроения, в частности к процессам формирования плоского поступательного движения наземных транспортных средств с колесными движителями перекатывающегося типа, и может быть использовано при создании снегоболотоходной техники или амфибий.
Из уровня техники известен способ преобразования вращательного движения вала двигателя в поступательное движение транспортного средства, осуществляемое посредством инерционного движителя, имеющего вращающийся ротор со смещенным центром вращения, который воздействует на подвижные в радиальном направлении инерционные массы и создает с помощью кольца-основания движущую силу (RU №2149117, 2000 г.). Основной недостаток такого способа заключается в сниженном функциональном уровне, поскольку он предусматривает, что в реализующем его движителе для получения движущей силы необходимо смещение подвижных в радиальном направлении вращающихся инерционных масс, и ее величина находится в зависимости от размера этих масс - это делает нецелесообразным его использование при необходимости получения значительных по величине движущих сил, например, при движении тяжелых транспортных средств. Кроме того, движитель содержит ряд промежуточных конструктивных элементов, включая "плавающее" устройство для смещения центра масс ротора, что предопределяет значительные непроизводительные затраты энергии, соответственно снижает КПД транспортного средства.
Более эффективен способ получения плоского поступательного движения транспортного средства посредством колесного движителя с "кантующимся" центром вращения (RU №2268165, 2006 г.), при котором крутящий момент от силовой установки подводят к сателлиту планетарного редуктора, размещенного на ведущем «плавающем» валу, который воспринимает вертикальную нагрузку транспортного средства и совершает сложное движение относительно оси вращения колеса с ободом правильной формы окружности, и "разводят" проекции оси вращения колеса и точки приложения веса транспортного средства P на горизонтальную ось на расстояние L. При этим обеспечивают изменение положения проекции точки P на вертикальную ось, что создает "кантующий" колесо крутящий момент, и получают эффект эксцентрикового колеса с плоским движением его оси.
Применение планетарного редуктора, который усложняет и удорожает способ привода колеса с одновременным снижением КПД колесного движителя, следует отнести к недостаткам данного аналога. К тому же реализующая способ конструкция движителя ведет к увеличению его веса и металлоемкости.
Наиболее близким аналогом (прототипом) изобретения является способ получения плоского поступательного движения движителя перекатывающегося типа преимущественно для наземных транспортных средств путем тактового формирования на движителе накопленной полной механической энергии с использованием потенциальной энергии внешнего силового (гравитационного) поля и создаваемой ее кинетической составляющей, при котором изначально подаваемый от используемого электродвигателя на входной элемент движителя исходный силовой поток путем заданного по величине и направлению смещения мгновенного центра давления относительно устойчивого положения равновесия трансформируют в работу сил трения, создающих момент силы, формирующий опорную поверхность перемещения (RU №2245259, 2003 г.).
В прототипе формирование силового потока ведут при использовании движителя, имеющего опорно-приводное устройство, связанное валом-шестерней с выходным валом мотор-редуктора. Для получения плоского поступательного движения обода колеса крутящий момент от мотор-редуктора через вал-шестерню передают на опорные ролики и за счет перекатывания последних по внутренней поверхности обода колеса смещают мгновенный центр давления вперед вверх (назад вверх), создавая опрокидывающий момент (момент силы), формирующий опорную поверхность и вызывающий плоское движение колеса.
Недостаток прототипа состоит в том, что передачу силового потока и его трансформацию в работу сил трения ведут по одноступенчатой упругой схеме с множеством промежуточных звеньев, не позволяющей демпфировать колебания, возникающие при формировании опорной поверхности, что приводит к ухудшению плавности хода и снижению общего КПД транспортного средства, и, следовательно, к сниженной эффективности такого способа.
Задачей изобретения является создание способа получения плоского поступательного движения колесного движителя перекатывающегося типа наземных транспортных средств, эффективного в различных условиях движения, на разных поверхностях движения, в т.ч. и с низким коэффициентом сцепления.
Технический результат, получаемый от использования предлагаемого способа, состоит в повышении тягово-сцепных свойств и опорно-временных характеристик движения, повышении общего КПД и плавности хода транспортного средства.
Для достижения технического результата в способе получения плоского поступательного движения колесного движителя перекатывающегося типа наземных транспортных средств путем тактового формирования на движителе накопленной полной механической энергии с использованием потенциальной энергии внешнего силового (гравитационного) поля и создаваемой ее кинетической составляющей, при котором изначально подаваемый от используемого электродвигателя на входной элемент движителя исходный силовой поток путем заданного по величине и направлению смещения мгновенного центра давления относительно устойчивого положения равновесия трансформируют в работу сил трения, создающих момент силы, формирующий опорную поверхность, согласно изобретению формирование силового потока ведут при использовании опорно-приводного устройства движителя, имеющего корпус «плавающего» типа с встроенным в него упомянутым электродвигателем, взаимодействующего с ободом движителя с обеспечением двухступенчатой квазиупругой системы подведения силового потока к ободу движителя, которая представляет собой два последовательно соединенных демпфера: электромагнитный с коэффициентом демпфирования

где M - вращающий момент, ω - угловая скорость,
и гравитационный, действующий по принципу гравитационного маятника с упругим моментом, пропорциональным моменту силы
My=mgl·sinφ
где l=rk - радиус колеса, m - масса, сосредоточенная в точке М,
g - ускорение свободного падения,
исходный силовой поток в виде вращающего момента, создаваемого взаимодействием электромагнитных полей статора и ротора электродвигателя, подают непосредственно на корпус опорно-приводного устройства и трансформируют его в работу сил трения в зоне контакта между ободом и корпусом, соответствующую условию движения транспортного средства, при этом работа сил трения А по перемещению точки М из положения М0 в положение М равна

где
U - силовая функция, зависящая от положения точки М в потенциальном поле, для которого она существует в виде U(X, Z), и зависящая от координат X, Z рассматриваемой точки М стационарного поля,
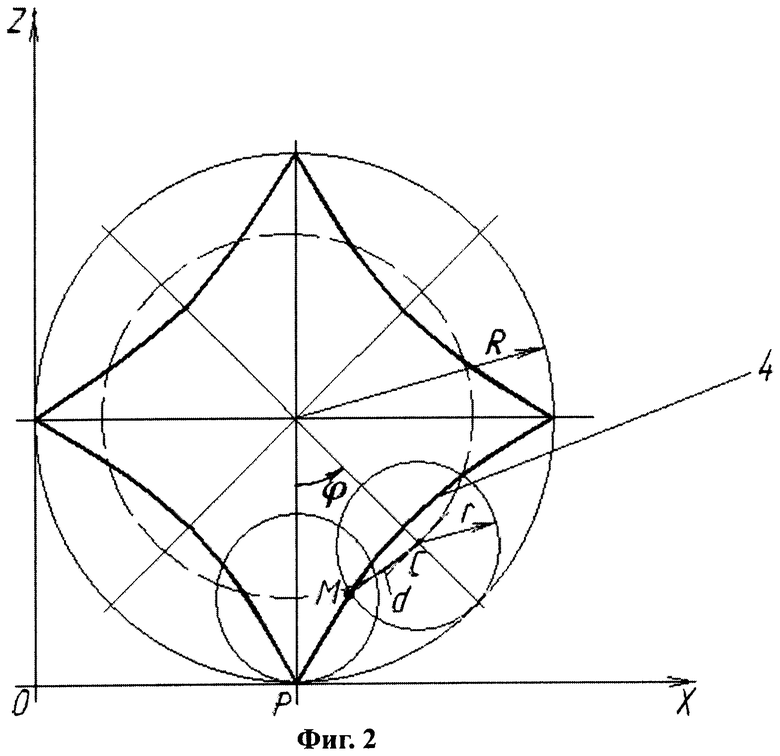
причем мгновенный центр давления смещают по внутренней поверхности обода колеса по траектории гипоциклоиды, например астроиде, определяемой уравнением
где R - направляющая поверхности для корпуса опорно-приводного устройства, r - радиус производящей окружности, d=СМ - расстояние от центра производящей окружности С до точки М,
получая момент силы с требуемыми по текущим условиям движения транспортного средства взаимосвязанными входными и выходными параметрами.
Частный отличительный признак заключается в том, что определяющими входные и выходные параметры формирования опорной поверхности являются фазочастотная и амплитудно-частотная характеристики, устанавливаемые с помощью передаточной функции формирования опорной поверхности,
где p - оператор преобразования Лапласа;
Мвр - вращающий момент электродвигателя;
ω - угловая скорость обода колеса.
Формирование опорной поверхности предлагаемым способом представляет собой трансформацию нестационарной связи в стационарную, при которой происходит деформация поверхности движения с возникновением упругого момента, пропорционального моменту силы.
Совокупностью отличительных признаков:
- использованием движителя с «плавающим» опорно-приводным устройством, в корпусе которого установлен электродвигатель;
- подачей исходного силового потока непосредственно на корпус опорно-приводного устройства и далее к ободу колеса по двухступенчатой квазиупругой системе, представляющей собой два последовательно соединенных демпфера: электромагнитный и гравитационный;
- дальнейшей трансформацией его в работу сил трения в зоне контакта между ободом и корпусом опорно-приводного устройства без промежуточных звеньев,
обеспечивают формирование на движителе накопленной полной механической энергии с использованием потенциальной энергии внешнего силового (гравитационного) поля, соответственно, момента силы, формирующего опорную поверхность перемещения, с минимальными затратами энергии, следовательно, с высоким КПД, а также улучшение тягово-сцепных свойств и опорно-временных характеристик работы движителя, что способствует работе силовой установки транспортного средства, например дизель-генератора, в установившемся режиме с низкими пиковыми нагрузками при изменяющихся условиях его движения и, соответственно, приводит к достижению высокой плавности хода транспортного средства и его топливной экономичности.
Достижению тех же эффектов способствует принятое в предлагаемом способе смещение мгновенного центра давления (точка М) по траектории гипоциклоиды, например астроиде, относительно устойчивого положения равновесия (полюс Р) с получением момента силы с требуемыми по текущим условиям движения ТС взаимосвязанными входными и выходными параметрами.
Для пояснения сущности предлагаемого способа на фиг.1 представлена схема осуществления такта; на фиг.2 - схема образования траектории перемещения мгновенного центра давления (точки М) (поз.4 - гипоциклоида); на фиг.3 - иллюстрация испытаний макета транспортного средства для оценки характеристик предлагаемого способа получения плоского поступательного движения колесного движителя перекатывающегося типа (фрагмент).
Предлагаемый способ реализуется при использовании движителя, имеющего опорно-приводное устройство 2 с корпусом «плавающего» типа и встроенным в корпус электродвигателем, в котором опорно-приводное устройство взаимодействует с ободом 1 с обеспечением двухступенчатой квазиупругой системы подведения силового потока, которая представляет собой два последовательно соединенных демпфера: электромагнитный с коэффициентом демпфирования Kд и гравитационный.
Сущность предлагаемого способа состоит в том, что плоское поступательное движение транспортного средства (ТС) с колесным движителем перекатывающегося типа осуществляется путем тактового накопления на ободе 1 движителя полной механической энергии с использованием потенциальной энергии внешнего силового (гравитационного) поля и создаваемой ее кинетической составляющей, при котором изначально подаваемый от используемого электродвигателя на входной элемент движителя исходный силовой поток путем заданного по величине и направлению смещения мгновенного центра давления (точка М) относительно устойчивого положения равновесия по горизонтали и вертикали по траектории гипоциклоиды, например астроиде, трансформирует работу сил трения в момент силы, формирующий опорную поверхность перемещения.
Формирование опорной поверхности осуществляется с помощью обода 1, который под действием вертикальной нагрузки  продавливает колею на величину Hк с формированием опорных элементов 3, определяющих тактовый характер накопления полной механической энергии на ободе 1 движителя, при этом возникает упругий момент, пропорциональный моменту силы My=mgl·sinφ, создающий демпфирующий эффект, что приводит к улучшению плавности хода ТС (первая квазиупругая ступень).
продавливает колею на величину Hк с формированием опорных элементов 3, определяющих тактовый характер накопления полной механической энергии на ободе 1 движителя, при этом возникает упругий момент, пропорциональный моменту силы My=mgl·sinφ, создающий демпфирующий эффект, что приводит к улучшению плавности хода ТС (первая квазиупругая ступень).
Смещение мгновенного центра давления, воспринимающего вертикальную нагрузку транспортного средства, приводит к изменению скольжения между якорем и статором электродвигателя, что создает демпфирующий момент Mд, равный  который сглаживает пиковые нагрузки, возникающие при формировании опорной поверхности (вторая квазиупругая ступень). В формуле демпфирующего момента Т - постоянная времени, с; Kд - коэффициент демпфирования, равный
который сглаживает пиковые нагрузки, возникающие при формировании опорной поверхности (вторая квазиупругая ступень). В формуле демпфирующего момента Т - постоянная времени, с; Kд - коэффициент демпфирования, равный

В уравнении упругого момента: l=rk - радиус колеса, m - масса, сосредоточенная в точке М, g - ускорение силы тяжести, угол φ пропорционален смещению S мгновенного центра давления (точки М) по траектории деформации относительно полюса Р.
Совместное действие вышеупомянутых демпфирующих свойств определяет оптимальную характеристику работы силовой установки, к примеру дизель-генератора транспортного средства, от которого получает питание электродвигатель движителя, и определяется работой сил трения в зоне контакта между ободом и корпусом ОПУ, а также изменяющимися условиями движения ТС.
В этом случае работа сил трения А по перемещению точки М из положения M0 в положение M равна

где U - силовая функция, зависящая от положения точки M в потенциальном поле, для которого она существует в виде U(X, Z), и зависящая от координат X, Z рассматриваемой точки M стационарного поля, определяет мощность силовой установки, затрачиваемую на формирование опорной поверхности, и устойчивую характеристику ее работы.
Для конкретного примера осуществления способа получения плоского поступательного движения колесного движителя перекатывающегося типа был изготовлен макет и проведены его полевые испытания (фиг.3). Сравнение показателей по удельной мощности при однотипных условиях полевых испытаний известного натурного образца (Брянского автозавода транспортного средства с электромеханическим приводом колес с подведением силового потока по упругой схеме для транспортного средства - модели М - 6910Э) и предлагаемого макетного образца транспортного средства с индивидуальным электромеханическим приводом колес перекатывающегося типа с подведением силового потока по двухступенчатой квазиупругой схеме (разработан авторами для апробации предлагаемого способа) показало, что показатель по удельной мощности известного макетного образца с мощностью силовой установки по генератору, равной 315 кВт при массе 22 тонны, имеет удельную мощность, равную 14,32 кВт/Т, в то время как разработанный согласно предлагаемому способу макет имеет показатель по удельной мощности, равный 8,3 кВт/Т. Это позволяет сделать вывод об очевидности преимущества предлагаемого способа получения плоского поступательного движения колесного движителя перекатывающегося типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ ПЕРЕКАТЫВАЮЩЕГОСЯ ТИПА | 2011 |
|
RU2467890C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2245259C2 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038218C1 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| Движитель Н.Т. Краснова с узлом поворота коленвала, транспортное средство с этим движителем и способ его движения (варианты) | 2017 |
|
RU2657710C1 |
| МОТОР-КОЛЕСО | 2010 |
|
RU2476330C2 |
| ВЕЛОСИПЕД С ИНЕРЦИОННЫМ ДВИЖИТЕЛЕМ | 2004 |
|
RU2264323C1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ | 2017 |
|
RU2664853C1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2022 |
|
RU2802483C1 |

Изобретение относится к области транспортных средств, приводимых в движение наземными колесными движителями, и может быть использовано при создании снегоболотоходной техники. Способ заключается в том, что образование кинетической составляющей полной механической энергии ведут при использовании опорно-приводного устройства движителя. Опорно-приводное устройство движителя содержит корпус «плавающего» типа с встроенным в него электродвигателем. Опорно-приводное устройство взаимодействует с ободом движителя с обеспечением двухступенчатой квазиупругой системы силового потока к ободу движителя. Квазиупругая система силового потока представляет собой два последовательно соединенных демпфера, один из которых электромагнитный, а второй гравитационный. Технический результат заключается в повышении тягово-сцепных свойств и опорно-временных характеристик работы движителя. 1 з.п. ф-лы, 3 ил.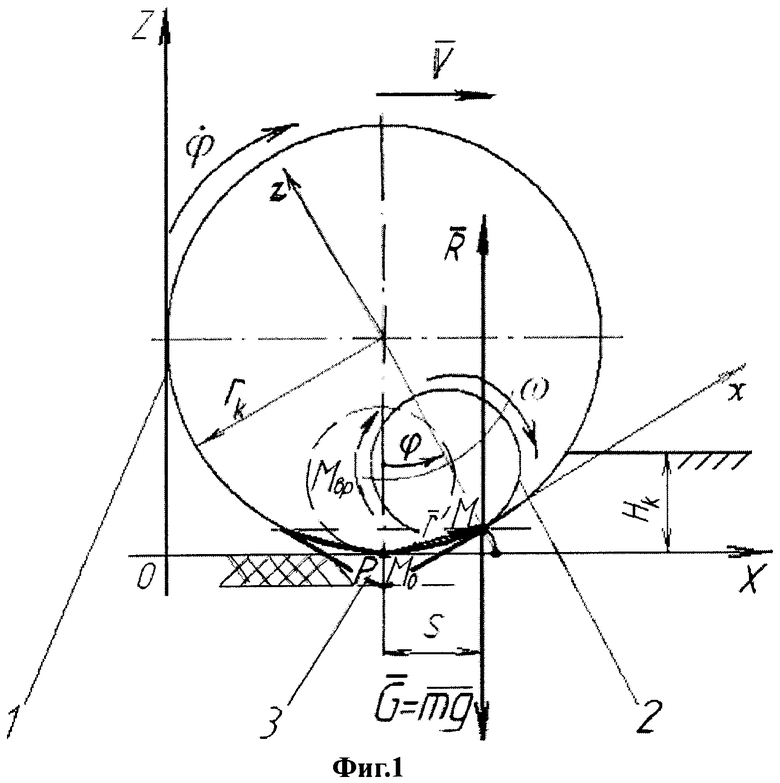
1. Способ получения плоского поступательного движения колесного движителя перекатывающегося типа наземных транспортных средств путем тактового формирования на движителе накопленной полной механической энергии с использованием потенциальной энергии внешнего силового гравитационного поля и образованием ее кинетической составляющей, при котором изначально подаваемый на входной элемент движителя от используемого электродвигателя исходный силовой поток путем заданного по величине и направлению смещения мгновенного центра давления относительно устойчивого положения равновесия трансформируют в работу сил трения, создающих момент силы на ободе движителя, формирующего опорную поверхность, отличающийся тем, что образование кинетической составляющей полной механической энергии ведут при использовании опорно-приводного устройства движителя, имеющего корпус «плавающего» типа с встроенным в него упомянутым электродвигателем, взаимодействующего с ободом движителя с обеспечением двухступенчатой квазиупругой системы силового потока к ободу движителя, которая представляет собой два последовательно соединенных демпфера:
электромагнитный с коэффициентом демпфирования 
где M - вращающий момент; ω - угловая скорость,
и гравитационный, действующий по принципу гравитационного маятника с упругим моментом, пропорциональным моменту силы
My=mgl·sinφ,
где l=rk - радиус качения; m - масса; сосредоточенная в точке M; g - ускорение свободного падения,
исходный силовой поток в виде вращающего момента, создаваемого взаимодействием электромагнитных полей статора и ротора электродвигателя, подают непосредственно на корпус опорно-приводного устройства и трансформируют его в работу сил трения в зоне контакта между ободом и корпусом, соответствующую условию движения транспортного средства, при этом работа сил трения А по перемещению точки М из положения М0 в положение М равна

где U - силовая функция, зависящая от положения точки М в потенциальном поле, для которого она существует в виде U(X, Z) и, зависящая от координат X, Z рассматриваемой точки М стационарного поля, причем мгновенный центр давления смещают по траектории гипоциклоиды, например астроиде, определяемой уравнением


где R - радиус направляющей поверхности для корпуса опорно-приводного устройства; r - радиус производящей окружности; d=СМ - расстояние от центра производящей окружности С до точки М, получая момент силы с требуемыми по текущим условиям движения транспортного средства взаимосвязанными входными и выходными параметрами.
2. Способ по п.1, отличающийся тем, что в нем определяющими входные и выходные параметры формирования опорной поверхности являются фазочастотная и амплитудно-частотная характеристики, устанавливаемые с помощью передаточной функции формирования опорной поверхности перемещения

где p - оператор преобразования Лапласа;
Мвр - вращающий момент электродвигателя;
ω3 - угловая скорость обода колеса.
| ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2245259C2 |
| КОЛЕСО С "КАНТУЮЩИМСЯ" ЦЕНТРОМ ВРАЩЕНИЯ | 2004 |
|
RU2268165C2 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038218C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ЛИТИЯ ИЗ СМЕСИ ЛИТИЕВЫХ КОНЦЕНТРАТОВ | 2005 |
|
RU2319756C2 |

