Изобретение относится к захватному приспособлению для манипулирования находящимися в зоне обработки компонентами с поста управления, отделенного от зоны обработки перегородкой.
В ядерно-технической установке протекает большое количество технологических процессов, в которых необходимо манипулировать радиоактивным материалом. При этом речь может идти, например, об обработке радиоактивных отходов, об обработке тепловыделяющих сборок или также о хранении радиоактивных веществ. Это манипулирование обычно осуществляется в соответствующем производственном здании ядерно-технической установки.
Именно при обработке возможно радиоактивных компонентов или материалов по причинам защиты от излучения необходимо, чтобы предусмотренное для манипулирования компонентов или материалов внутреннее помещение или зона обработки такого производственного здания по своим строительным правилам выполнения имело достаточное экранирование от радиоактивного излучения относительно окружающей среды. Кроме того, подобная зона обработки обычно герметична для защиты обслуживающего персонала и экранирована перегородкой от расположенной рядом зоны управления, из которой производится манипулирование находящимися в зоне обработки компонентами или материалами. Подобная принципиальная конструкция может также использоваться при обработке химических или токсичных материалов в химической промышленности.
Собственно манипулирование находящимися в зоне обработки компонентами или материалами обслуживающим персоналом осуществляется обычно дистанционно управляемыми манипуляторами, установленными в перегородке. Подобные манипуляторы (как, например, раскрыто в RU 2022775, 15.11.1994) обычно имеют некоторое количество выступающих в зону обработки захватных элементов, которые управляются обслуживающим персоналом вручную. Через соответствующую, обычно комплексно выполненную систему перемещения захватных элементов движения захватных элементов преобразуются в соответствующие движения головок манипуляторов внутри зоны обработки. Тем самым может обеспечиваться надежное манипулирование находящимися в зоне обработки компонентами или материалами с последовательным отделением зоны обработки от зоны управления.
Обычно предусмотренные для подобных систем манипуляторы выполнены для покрытия всего возможного спектра работ и в соответствии с этим сконструированы как с возможностью сравнительно тонкой юстировки, так и восприятия сравнительно больших перестановочных усилий. Это к тому же обусловливает, что манипуляторы обычно выполнены сложно и, тем самым, дорого стоят.
Поэтому в основе изобретения лежит задача создания захватного приспособления для манипулирования находящимися в зоне обработки компонентами из зоны управления, отделенной от зоны обработки перегородкой, с помощью которого особенно просто обеспечивается надежное манипулирование находящимися в зоне обработки компонентами или материалами.
Данная задача в соответствии с изобретением решается с помощью проведенного через перегородку пустотелого вала, на выступающем в зону обработки конце которого установлен регулируемый тяговым элементом захват, причем тяговый элемент проходит внутри пустотелого вала и соединен с органом управления, установленным на выступающем в зону обработки участке пустотелого вала.
При этом изобретение исходит из того, что можно осуществить значительное упрощение конструкции устройства для манипулирования находящимися в зоне обработки компонентами или материалами, произведя последовательную структуризацию и подразделение предусмотренных для соответствующего устройства участков применения и заданных функций по сложности. В отличие от принятого до настоящего времени подхода предоставлять высокосложные манипуляторы для выполнения всех возможных функций, изобретением предусмотрено согласование устройства для манипулирования компонентами или материалами в отношении их сложности специфически с соответственно предусмотренными участками работы. В частности, при этом можно осуществить значительное упрощение устройства для тех случаев, когда необходимые работы при манипулировании компонентами или материалами охватывают исключительно сравнительно простые манипуляции или рабочие операции, например, захват компонентов, отделение детали, подъем или опускание детали или также перемещение детали. Выполненное специально с учетом этих видов применения захватное приспособление содержит, по существу, в качестве собственного, предназначенного для манипулирования компонентами или материалами элемента, захват, который должен управляться соответствующим образом из зоны управления. При этом управление захватом осуществляется для соблюдения особенно простой конструкции через проходящий внутри пустотелого вала тяговый элемент.
При этом достигается простая конструкция высокой надежности и легкости обслуживания в том случае, когда тяговый элемент предпочтительно выполнен в виде канатной системы.
Захват захватного приспособления целесообразно выполнить в простом исполнении для механического захвата компонента или детали. С этой целью захват целесообразно содержит некоторое количество захватных кулачков, взаимодействующих попарно в виде щипцов.
Захватное приспособление выполнено предпочтительно для удержания сравнительно большого диапазона поворота внутри зоны обработки так, что установленный на пустотелом валу со стороны конца захват позиционирован в сравнительно большом объеме зоны обработки. Для обеспечения этого пустотелый вал с преимуществом размещен в перегородке в шаровом шарнире. При этом шаровой шарнир целесообразно выполнен по размерам таким образом, что для пустотелого вала задана рабочая зона, составляющая приблизительно 90°. С целью соблюдения сравнительно простой конструкции, которая к тому же обеспечивает особенно простой доступ к пустотелому валу, например, для работ по обслуживанию или для замены, шаровой шарнир содержит в другом преимущественном варианте выполнения размещенный в двух чашеобразных элементах направляющий шар для пустотелого вала.
Особенно высокая универсальность в отношении возможностей использования захватного приспособления достигается, когда пустотелый вал установлен преимущественно перемещающимся. Тем самым, именно в соединении со сравнительно большим диапазоном поворота для пустотелого вала, если смотреть в продольном направлении пустотелого вала, достигается сравнительно большая рабочая зона для позиционирования захвата. Для того, чтобы и при обработке радиоактивных или токсических компонентов или материалов соблюдать особенно высокий стандарт безопасности, пустотелый вал в другом предпочтительном варианте снабжен на своей выступающей в зону управления части вращающейся уплотнительной пластиной, которая через сильфон, окружающий пустотелый вал, герметично соединена с перегородкой. При этом сильфон обеспечивает сравнительно высокую подвижность захватного приспособления в продольном направлении пустотелого вала, не оказывая отрицательного действия на герметичность установки, например, на участке перемещающейся опоры пустотелого вала.
С особым преимуществом захватное приспособление применимо в связи со специально выбранными операциями обработки и манипулирования в ядерно-технической установке. С успехом захватная установка применяется тем самым для манипулирования требующими удаления деталями или компонентами в ядерно-технической установке, причем, в частности, предусмотрено применение требующих при обработке удаления фильтровальных патронов, например, при прессовании фильтровальных патронов.
Достигаемые изобретением преимущества заключаются, в частности, в том, что захватное приспособление особенно простой конструкции и, тем самым, с особо малым расходом обеспечивает надежное выполнение предусмотренных специфических рабочих операций. Тем самым, посредством последовательной ориентации на специальные сферы деятельности обеспечивается отказ от сложности без принятия мер по ограничению отдельной рабочей операции.
Пример выполнения изобретения поясняется подробнее с помощью чертежа. На чертежах показано:
Фиг.1 - захватное приспособление,
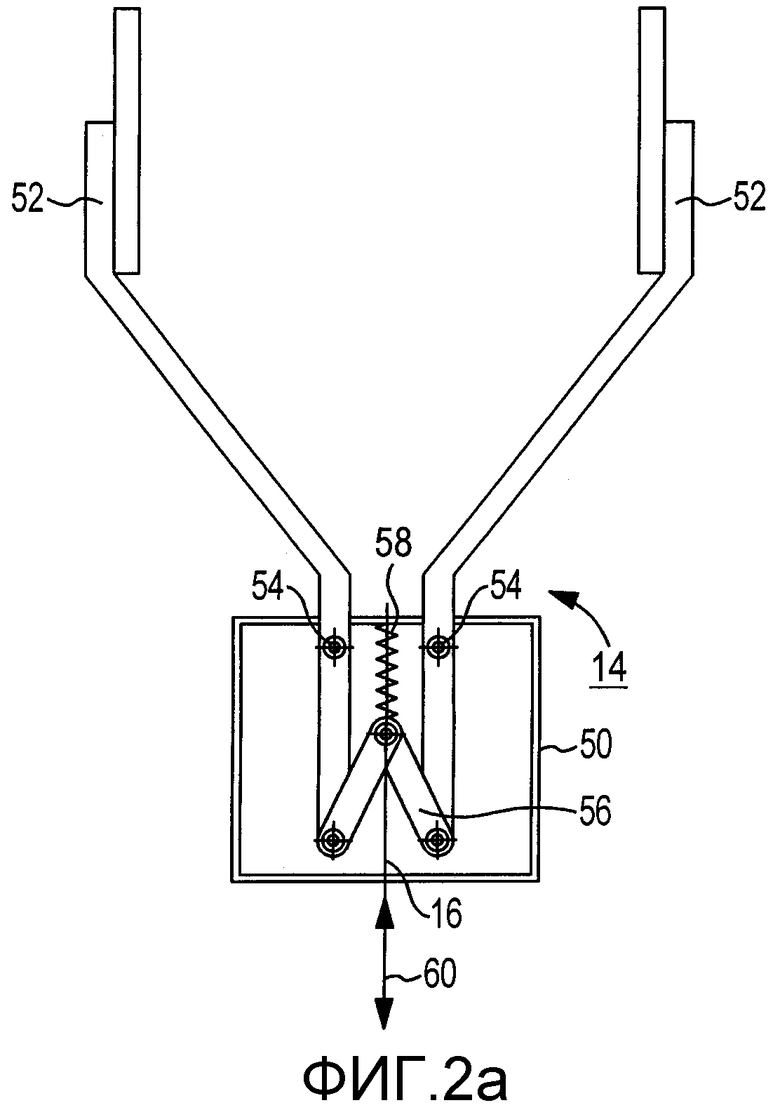
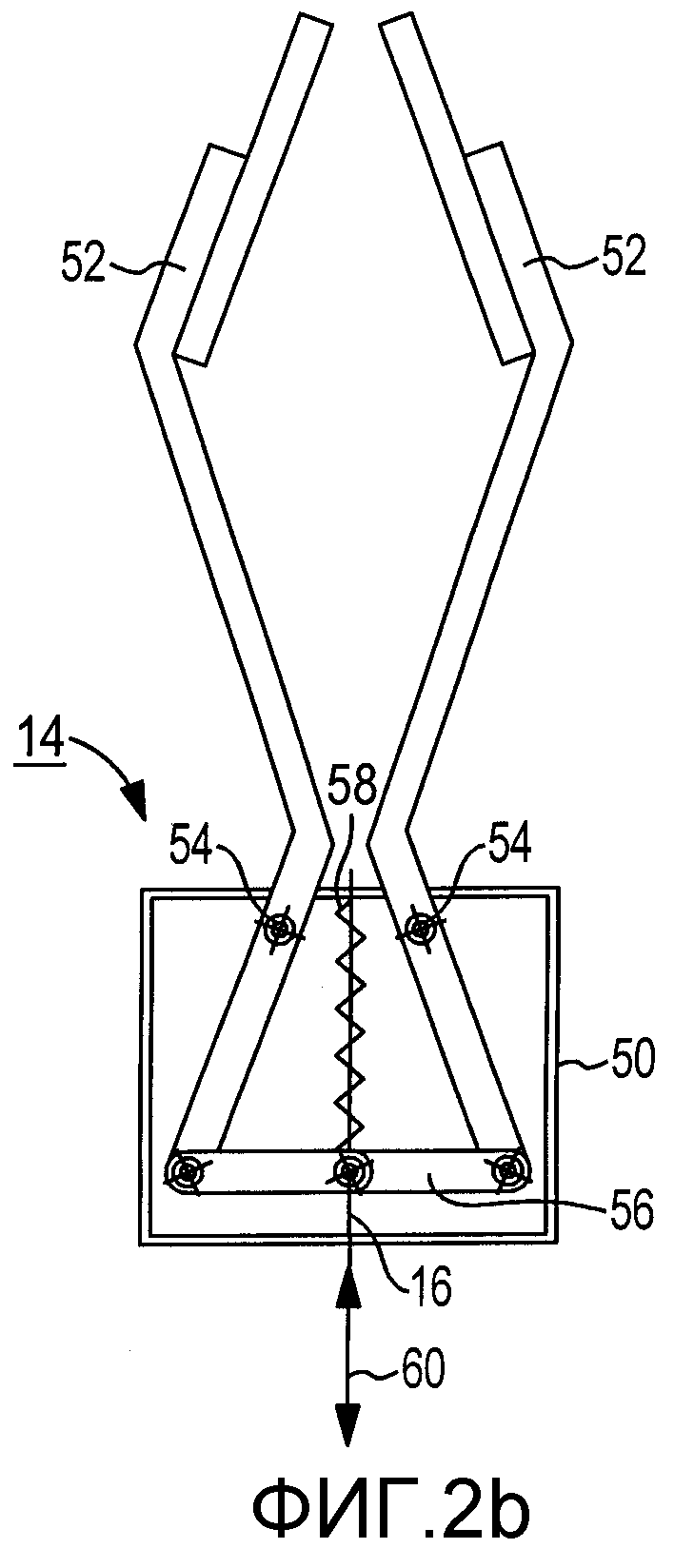
Фиг.2 - захват захватного приспособления по фиг.1 в открытом положении (2а) и в положении захвата (фиг.2b),
Фиг.3 - ядерно-техническая установка с некоторым количеством захватных приспособлений по фиг.1, в сечении,
Фиг.4 - альтернативная форма выполнения ядерно-технической установки по фиг.3 в первом рабочем положении (фиг.4а) и во втором рабочем положении (фиг.4b).
Одинаковые детали снабжены на всех фигурах одинаковыми позициями.
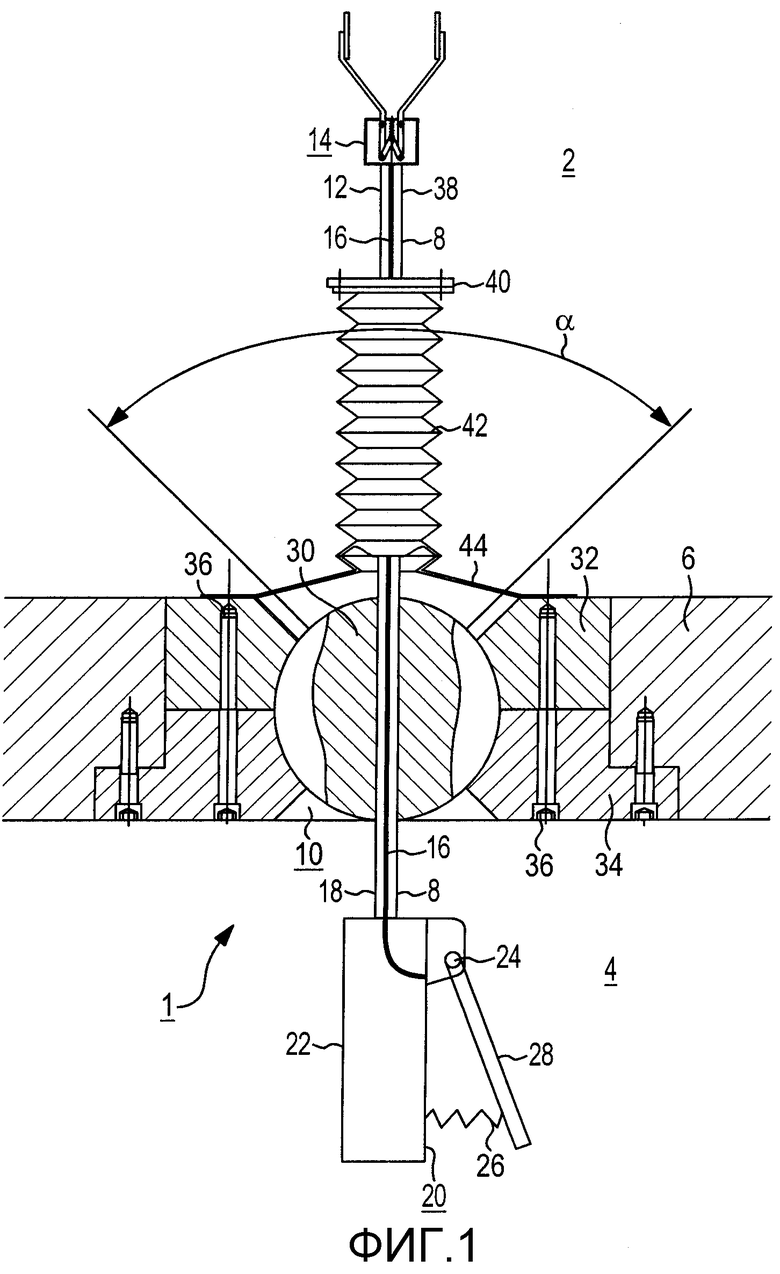
Захватное приспособление 1 в соответствии с фиг.1 предназначено для манипулирования находящимися в зоне обработки компонентами или материалами, в которых имеется радиоактивная нагрузка. Но альтернативно можно предусмотреть захватное приспособление 1 и для обработки химических или других токсичных компонентов или материалов в зоне обработки 2. Для обеспечения надежной обработки находящихся в зоне обработки 2 компонентов их обработка предусмотрена из зоны управления 4, в которой может находиться обслуживающий персонал и которая отделена от зоны обработки 2 перегородкой 6.
Для обеспечения надежной, связанной с задачей обработки находящихся в зоне обработки 2 компонентов при особо простой конструкции захватное приспособление 1 содержит пустотелый вал 8, проведенный через шаровой шарнир 10 через перегородку 6. На выступающем в зону обработки 2 конце 12 пустотелого вала установлен захват 14, который предназначен для собственно захвата, подъема, опускания или перемещения компонентов в зоне обработки 2.
Захват 14 приводится в действие по установленному внутри пустотелого вала тяговому элементу 16, в примере выполнения канатной системы. Тяговый элемент 16 со своей стороны соединен с органом 20 управления, установленным в выступающем в зону управления 4 участке 18 пустотелого вала 8. Орган 20 управления содержит при этом рукоятку 22, на которой через плоский шарнир 24 находится нагружаемая возвратной пружиной 26 установочная рукоятка 28. Установочная рукоятка 28 находится при этом в кинематической связи с выполненным как канатная система тяговым элементом 16 так, что посредством приведения в действие установочной рукоятки 28 обеспечивается приведение в действие тягового элемента 16 и, тем самым, регулировка захвата 14.
Для обеспечения сравнительно большой рабочей зоны для захватного приспособления 1 шаровой шарнир 10 по своим размерам выполнен для максимального угла поворота α пустотелого вала 8, составляющего около 90°. Шаровой шарнир 10 содержит при этом направляющий шар 30, установленный в двух чашеобразных элементах 32, 34, соединенных разъемно с перегородкой 6. При этом второй чашеобразный элемент 34 разъемно соединен установочными винтами 36 с первым чашеобразным элементом 32. При этом ослабление установочных винтов 36 обеспечивает особенно простое снятие второго чашеобразного элемента 34, вследствие чего снова обеспечивается сравнительно простое снятие направляющего шара и с ним установленного в нем пустотелого вала 8. Тем самым при необходимости обслуживания обеспечивается сравнительно простое снятие захватного приспособления 1.
Для особенно большой рабочей зоны в отношении позиционирования захвата 14 в зоне обработки 2 пустотелый вал 8 установлен перемещающимся в своем продольном направлении в направляющем шаре 30. С целью соблюдения при этом особенно высокого стандарта надежности в отношении уплотнения зоны обработки 2 пустотелый вал 8 снабжен на выступающей в зону обработки 2 части 38 вращающейся уплотнительной пластиной 40, которая герметично соединена по окружающему пустотелый вал 8 сильфону 42 с присоединенной к перегородке 6 уплотнительной пластиной 44 и через нее - с перегородкой 6.
Форма захвата 14 пояснена подробнее на фиг.2а и 2b. На фиг.2 а захват 14 изображен в открытом установочном положении. Захват 14 содержит корпус 50 захвата, в который введен выполненный в виде канатной системы тяговый элемент 16. Собственно захватная функция захвата 14 реализуется некоторым количеством захватных прихватов 52, взаимодействующих попарно как клещи. Каждый захватный прихват 52 введен через корпус 50 захвата в его внутреннюю часть и установлен в соответствующем плоском шарнире 54 с возможностью вращения. На своем находящемся внутри корпуса 50 захвата свободном конце захватные прихваты 52 соединены между собой через систему тяг и рычагов 56, с которой входит в зацепление тяговый элемент 16. Система тяг и рычагов 56 соединена через возвратную пружину 58 с корпусом 50 захвата так, что после приведения в действие захватных прихватов 52 автоматически обеспечивается возврат в показанное на фиг.2а положение покоя захвата 14. Как показано двойной стрелкой 60, система тяг и рычагов 56 реверсивно подвижна через тяговый элемент 16 навстречу направлению натяжения возвратной пружины 58.
Отклонение системы тяг и рычагов 56 вследствие растягивающей нагрузки тягового элемента 16 переводит при этом захват 14 в рабочее положение, как это показано, например, на фиг.2b. При этом отклонение системы тяг и рычагов 56 вызывает изображенным способом боковое смещение соответственно находящегося внутри корпуса конца захватных прихватов 52. При этом вследствие их возможности поворота в соответствующем плоском шарнире 54 захватные прихваты 52 попарно перемещаются навстречу друг другу и тем самым образуют показанное на фиг.2b замкнутое положение или захватное положение. При этом, как показано на фиг.2b, возвратная пружина 58 натягивается. При отпускании нагрузки тягового элемента 16 напряжением при растяжении реактивная сила возвратной пружины 58 вызывает автоматическое раскрытие взаимодействующих в виде клещей захватных прихватов 52.
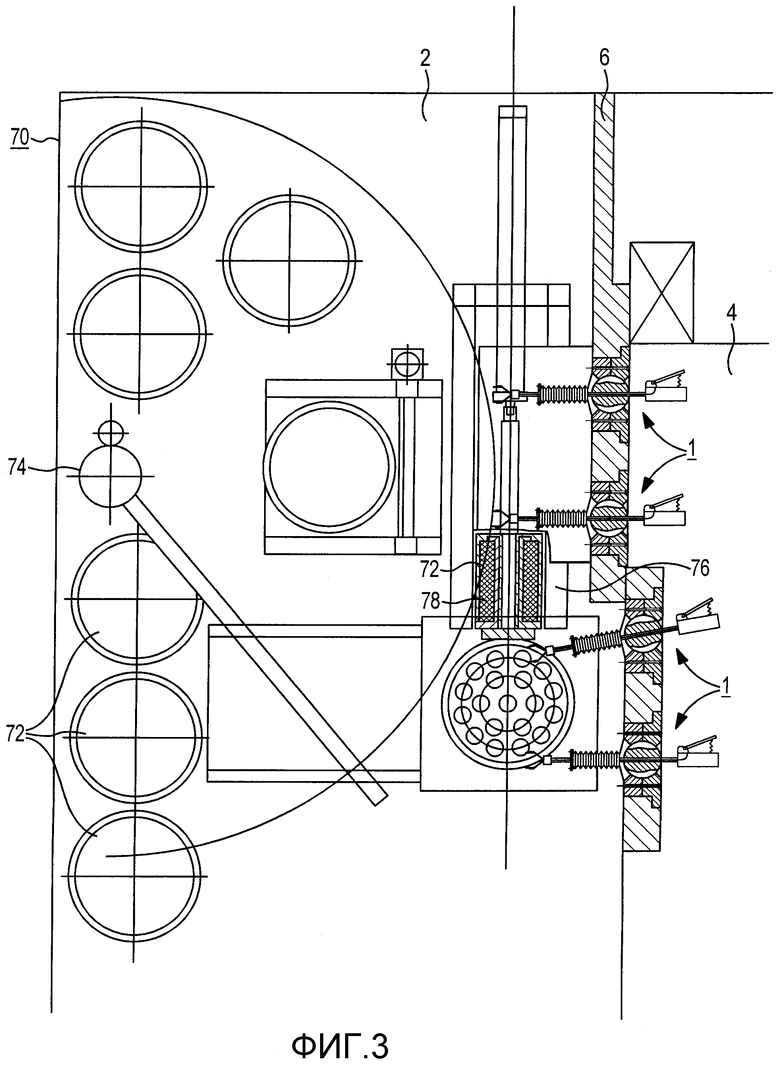
Захватное приспособление 1 особенно пригодно для надежной обработки требующих удаления деталей или компонентов в ядерно-технической установке. Пример возможного применения захватного приспособления 1 изображен на фиг.3.
В ядерно-технической установке 70 по фиг.3 в примере выполнения речь идет о производственном здании для прессования требующих удаления фильтровальных патронов, которые могут быть радиоактивными. Кроме того, ядерно-техническая установка 70 содержит в качестве зоны обработки 2 приемную емкость, отделенную перегородкой 6 от установленной рядом зоны управления 4. В перегородке 6 установлено некоторое количество захватных приспособлений 1.
Зона обработки 2 в примере выполнения по фиг.3 предусмотрена для манипулирования фильтровальными патронами. Фильтровальные патроны при этом поступают в контейнерах 72. Для обработки содержащихся в нем фильтровальных патронов каждый контейнер 72 вначале с помощью настенного поворотного крана 74 устанавливается в рабочей зоне соответственно предусмотренных захватных приспособлений 1. С помощью захватных приспособлений 1 и не изображенных подробнее пневматических гайковертов с каждого обрабатываемого контейнера 72 вначале отвинчивают винты на крышке так, чтобы затем можно было снять соответствующую крышку контейнера краном хранилища контейнеров. Затем соответствующий контейнер 72 устанавливают стенным поворотным краном 74 и соответствующим захватом для контейнеров без крышек на опрокидывающее приспособление 76. На нем каждый контейнер 72 поворачивают или опрокидывают так, чтобы находящиеся в нем фильтровальные патроны 78 можно было снять с помощью соответствующего захватного приспособления 1. Затем снятые фильтровальные патроны 78 сбрасывают захватным приспособлением 1 в приемную камеру. Через нее фильтровальные патроны 78 подаются на гидравлический пресс.
Полученную тем самым прессовку затем перемещают в соответствующим образом подготовленный бетонированный контейнер для хранения. Захватными приспособлениями 1 вкладывают прессовку в соответствующие трубы.
Заполненный соответствующими прессовками контейнер для хранения снабжают затем установленной ранее крышкой контейнера. К нему с помощью захватного приспособления 1 и пневматического гайковерта привинчивают крышку. Закрытый, тем самым, крышкой контейнер для хранения подается краном для контейнеров для дальнейшей транспортировки в хранилище контейнеров.
Тем самым, захватные приспособления 1 в примере выполнения по фиг.3 применяются специально для таких работ, при которых необходимо только сравнительно простое манипулирование соответствующими компонентами или материалами. Именно поэтому при простой конструкции захватного приспособления 1 достигаются высокая надежность и безопасность при выполнении соответствующей работы.
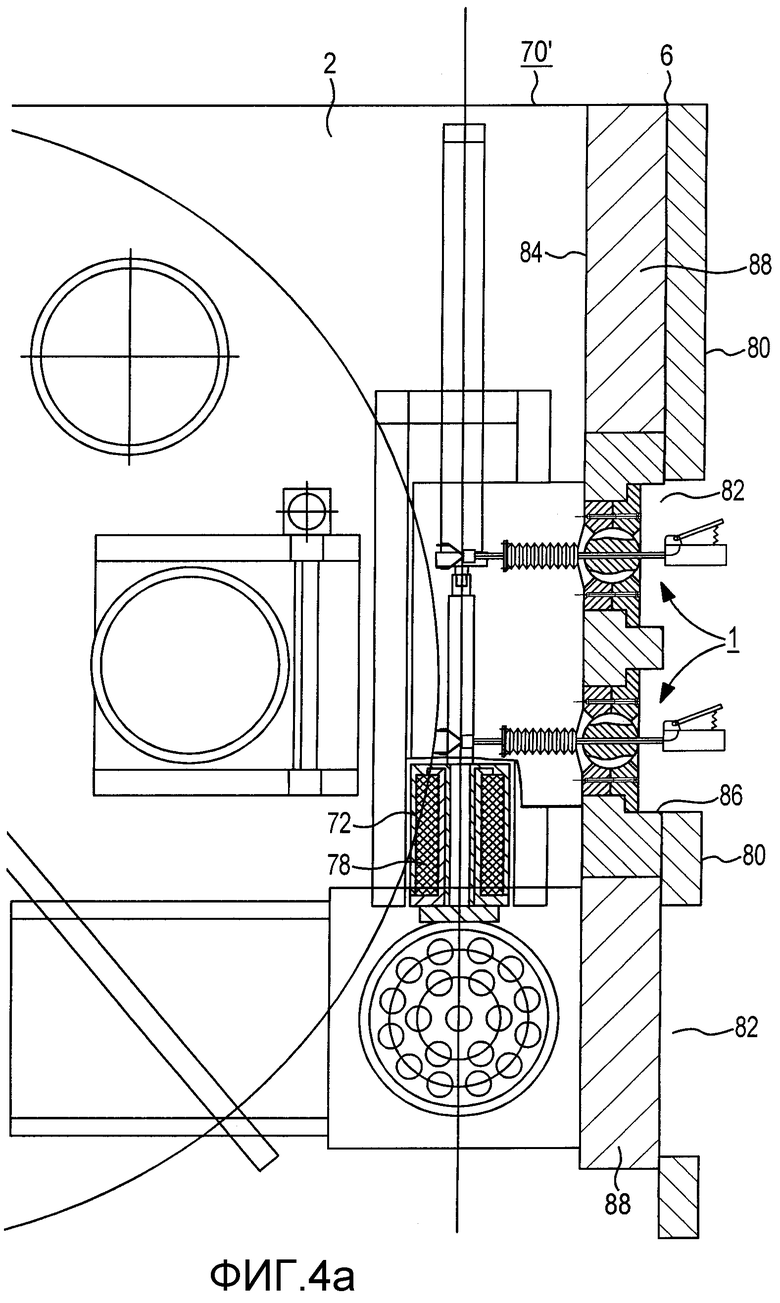
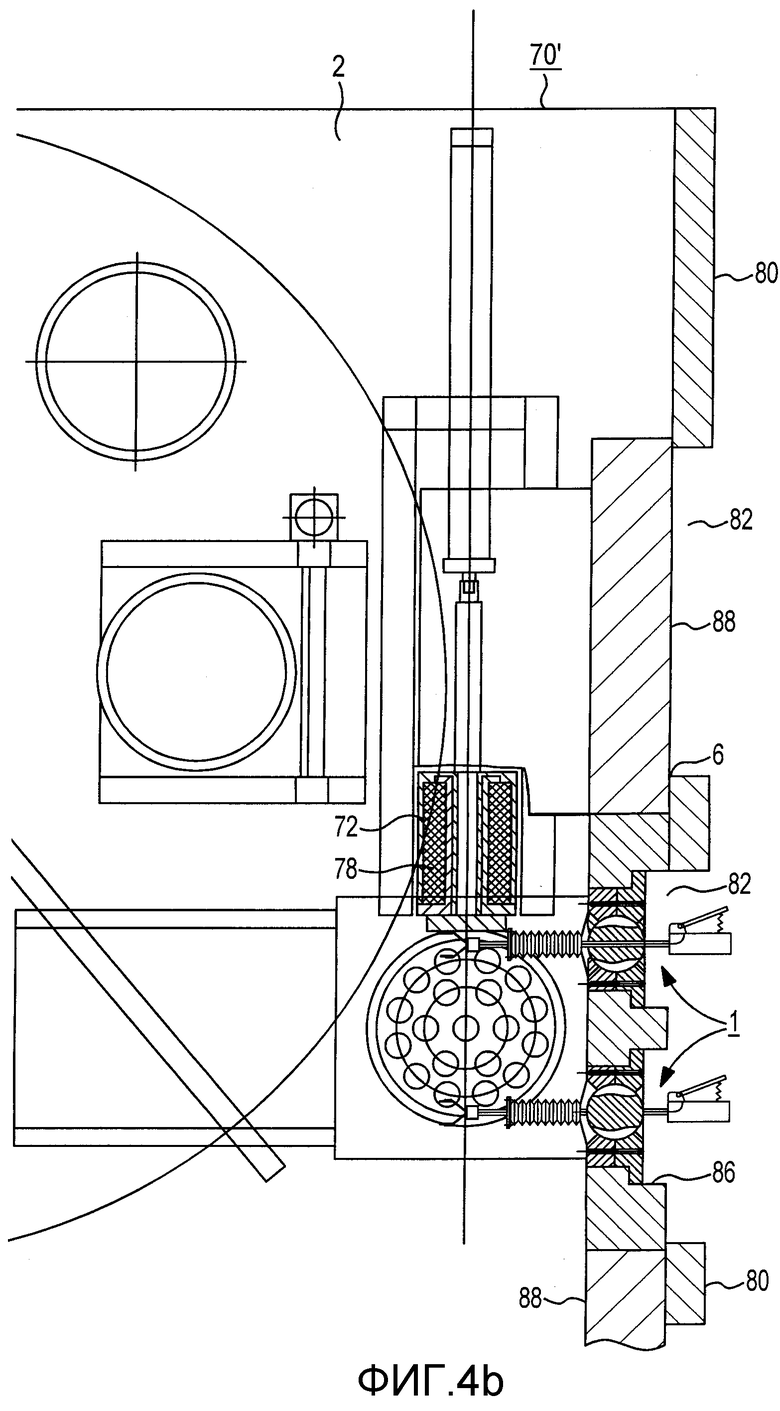
В альтернативном варианте выполнения ядерно-технической установки 70' по фиг.4 перегородка 6 выполнена многокомпонентной для экономии дорогостоящих материалов. При этом перегородка 6 содержит в качестве первого компонента неподвижную стенную деталь 80, которая на предусмотренной рабочей позиции имеет при обработке резервуаров 72 соответствующие сравнительно большие по площади отверстия 82. В качестве другого компонента перегородка 6 содержит взаимодействующую со стенной деталью 80 перемещающуюся в своем продольном направлении стенную деталь 84.
Стенная деталь 84 со своей стороны составлена из рабочего элемента 86, который, с одной стороны, несет на себе захватные приспособления 1 и, с другой стороны, изготовлен из прозрачного, поглощающего излучение материала, например, свинцового стекла, для того, чтобы обеспечить обслуживающему персоналу соответствующее наблюдение за обработкой находящихся в зоне обработки 2 материалов или компонентов. Рабочий элемент 86 окружен непрозрачными, например, изготовленными из стали другими стенными элементами 88.
Благодаря возможности перемещения стенного элемента 84 установленные в рабочем элементе 86 захватные приспособления 1 применимы как в первом рабочем положении, как показано на фиг.4а, так и во втором рабочем положении, как показано на фиг.4b. Благодаря такой установке, тем самым, необходим только монтаж одного единственного рабочего элемента 86, изготовленного из сравнительно высококачественного материала, например свинцового стекла, для того, чтобы обслуживать соответствующим образом оба рабочих положения. Заданное соответствующим отверстием 82 неактивное отверстие в стенной детали 80 при этом соответствующим образом закрыто одним из стенных элементов 88.
Для обеспечения перемещения стенного элемента 84 в своем продольном направлении особенно простым образом стенной элемент 84 имеет по своей толщине такие размеры, что он может полностью принять соответствующие захватные элементы захватных приспособлений 1, если захватные приспособления 1 полностью выдвинуты в своих продольных направлениях. Но альтернативно стенной элемент 84 может быть выполнен также сравнительно тонкостенным с толщиной стенки 84, соответствующей варианту выполнения по фиг.3. В этом случае для перемещения стенного элемента 84 в своем продольном направлении предусмотрено, что вначале захватные элементы и при необходимости другие объемные детали захватных приспособлений 1 демонтируются и после совершенного перемещения стенного элемента 84 вновь монтируются.
Перечень позиций
1 захватное приспособление
2 зона обработки
4 зона управления
6 перегородка
8 пустотелый вал
10 шаровой шарнир
12 конец
14 захват
16 тяговый элемент
18 участок
20 орган управления
22 рукоятка
24 плоский шарнир
26 возвратная пружина
28 установочная рукоятка
30 направляющий шар
32, 34 чашеобразные элементы
36 установочные винты
38 деталь
40 уплотнительная пластина
42 сильфон
44 уплотнительная пластина
50 корпус захвата
52 захватные кулачки
54 плоский шарнир
56 система тяг и рычагов
58 возвратная пружина
60 двойная стрелка
70, 70' ядерно-техническая установка
72 резервуары
74 стенной поворотный кран
76 опрокидывающее устройство
78 фильтровальные патроны
80 стенной элемент
82 отверстия
84 стенной элемент
86 рабочий элемент
88 стенные элементы
α угол поворота
Изобретение относится к области атомной техники. Сущность изобретения: захватное приспособление для манипулирования находящимися в зоне обработки компонентами из отделенной от зоны обработки перегородкой зоны управления содержит проведенный через перегородку пустотелый вал. На выступающем в зону обработки конце пустотелого вала установлен регулируемый тяговым элементом захват. Причем тяговый элемент проведен внутри пустотелого вала и соединен с органом управления, выступающим в зону управления участком пустотелого вала. Преимущества изобретения заключаются в повышении его надежности и безопасности. 7 з.п. ф-лы, 4 ил.
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2022775C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ИЗ ЯДЕРНОГО РЕАКТОРА | 1988 |
|
SU1669313A1 |
| US 5586158 A, 17.12.1996 | |||
| ОФТАЛЬМОЛОГИЧЕСКОЕ УСТРОЙСТВО С ИЗМЕНЯЕМЫМИ ОПТИЧЕСКИМИ СВОЙСТВАМИ, ВКЛЮЧАЮЩЕЕ ЖИДКОКРИСТАЛЛИЧЕСКИЕ ЭЛЕМЕНТЫ С НАНОРАЗМЕРНЫМИ КАПЛЯМИ ИЗ ЖИДКИХ КРИСТАЛЛОВ | 2014 |
|
RU2611076C2 |

