Изобретение относится к устройству управления перегрузочным аппаратом сельскохозяйственных машин, в особенности полевых измельчителей.
Уровень техники
В европейском патенте ЕР 0131693 В1 описана система управления разгрузочным патрубком. Описанное устройство относится к прицепному полевому измельчителю с прицепленным к нему и следующим за ним транспортным кузовом. С помощью разгрузочного патрубка измельченная убранная масса перегружается из измельчителя в кузов. Относительный угол между транспортным кузовом и прицепным измельчителем считывается у места сцепки. По этому углу управление разгрузочным патрубком осуществляется по определенной программе таким образом, что убранная масса всегда попадает в кузов. Относительный угол установки разгрузочного патрубка считывается и сообщается системе управления.
Недостаток указанного устройства состоит в необходимости считывания относительного угла между полевым измельчителем и транспортным кузовом. Для этого необходимо применение беззазорных механических щупов с высокочувствительными сенсорами или оптического считывающего средства. Для оптического считывающего средства необходимо, чтобы каждый транспортный кузов был оснащен соответствующими средствами отражения.
Другое устройство для загрузки транспортных контейнеров известно из патентного документа ФРГ №4403893. В нем дано описание управления перегрузочным аппаратом, при котором он управляется по данным оптических или акустических дальномеров, которые производят определение и замеры заполнения транспортного контейнера. Заполнение контейнера определяется с помощью нескольких датчиков дистанционных сигналов в мгновенной точке поступления массы в транспортный контейнер. Когда на этом участке достигается определенная высота массы, перегрузочный аппарат поворачивается до тех пор, пока не будет опознан следующий участок с малой высотой заполнения. Далее описано средство, которое позволяет с помощью концевого контакта выдерживать постоянное заданное угловое положение разгрузочного патрубка относительно продольного направления уборочной машины. Это устройство является наиболее близким к заявляемому и принято в качестве прототипа.
Указанное устройство управления перегрузочным аппаратом имеет тот недостаток, что дистанционные датчики очень дороги. Кроме того, указанное устройство удовлетворительно работает только тогда, когда поток убранной массы примерно совпадает с направлением дистанционного измерения дальности, что имеет место в случае потока, направленного перпендикулярно транспортному контейнеру. Если же убранная масса перегружается в транспортный контейнер, который прицеплен к самоходному полевому измельчителю или следует за ним в сцепке с отдельным тягачом, данное устройство не выполняет своей задачи. Причина заключается в направлении и дальности перегрузки между разгрузочным патрубком и транспортным контейнером. Убранная масса выходит в направлении перегрузки почти горизонтально, однако с увеличением расстояния перегрузки замедляется, и поток принимает искривленную траекторию. Средства измерения дальности работают на основе заданного от перегрузочного аппарата направления выброса. Из-за искривленной траектории точка падения убранной массы в транспортный контейнер и зона определения дальности оказываются различными. При этих условиях удовлетворительное управление исключено.
Раскрытие изобретения
Таким образом, задачей, на решение которой направлено изобретение, является создание устройства для перегрузки убранной массы сельхозпродукции, в особенности для самоходного полевого измельчителя с разгрузочной трубой, которое обеспечивает экономичное, надежное и простое автоматическое управление направлением перегрузки для перегрузки убранной массы в транспортный контейнер.
Решение поставленной задачи обеспечивается за счет того, что в устройстве для перегрузки убранной массы сельскохозяйственной продукции от сельскохозяйственной уборочной машины в транспортный контейнер с помощью поворотного перегрузочного аппарата согласно изобретению угол между перегрузочным аппаратом и продольным направлением машины выполнен регулируемым в соответствии с параметром, задающим направление движения сельскохозяйственной уборочной машины.
Направление движения сельскохозяйственной уборочной машины, как правило, задается поворотом управляемых колес посредством системы рулевого управления. Другим средством задания направления движения может служить относительный поворот вокруг вертикальной оси частей рамы машины, из которых по меньшей мере на одной части смонтирована жесткая колесная ось. Указанное так называемое управление поворотом с помощью рамы с шарнирным сочленением, или иначе - путем излома шарнирно-сочлененной рамы, применяется в самоходных уборочных комбайнах, таких как комбайн для уборки сахарной свеклы, и в самоходных полевых измельчителях.
В одном из предпочтительных вариантов осуществления изобретения в устройстве для перегрузки убранной массы в качестве параметра, задающего направление движения сельскохозяйственной уборочной машины, выбран угол рулевого поворота сельскохозяйственной уборочной машины с рулевым управлением. В другом варианте эти параметром может служить угол излома в шарнирном сочленении шарнирно-сочлененной рамы сельскохозяйственной уборочной машины.
Практика показала, что можно осуществлять управление разгрузочной трубой полевого измельчителя автоматически независимо от обнаружения положения транспортного контейнера. Можно отказаться от сигналов обратной связи относительно степени заполнения транспортного контейнера или его положения относительно полевого измельчителя.
Управление такого типа особенно применимо, когда убранная масса перегружается в следующий позади транспортный контейнер. Транспортный контейнер может транспортироваться за полевым измельчителем различными способами. В простейшем случае транспортный контейнер имеет собственное шасси и прицепляется к тяговой сцепке полевого измельчителя. При этом он может быть контейнером перегрузочного типа или простым транспортным средством. Полевой измельчитель может быть также снабжен в своей задней части седельным соединительным устройством. В этом случае к нему присоединяется седельный полуприцеп, следующий за полевым измельчителем в процессе заполнения. Далее, транспортный контейнер может быть установлен на раме полевого измельчителя и составлять его часть. В этом случае заполненный транспортный контейнер перегружается в транспортное средство с помощью донного скребкового конвейера или путем опрокидывания. Еще один возможный вариант состоит в том, что транспортный контейнер представляет собой отдельную самоходную машину или несамоходную машину, которая транспортируется тягачом вслед за полевым измельчителем.
Во всех указанных вариантах перегрузки убранной массы в транспортный контейнер этот контейнер следует по пути движения (следу) сельскохозяйственной уборочной машины с отставанием по времени и небольшим отклонением, и при этом направление перегрузки ориентировано примерно в направлении продольной оси уборочной машины.
Как правило, уборку урожая сельскохозяйственной уборочной машиной производят вдоль рядов или валков. Для снижения потерь урожая ряды или валки высевают или укладывают по прямым линиям. Неравномерности в рядах или валках в значительной мере компенсируются при уборке урожая передними срезающими аппаратами. Соответственно, изменения направления движения при подборе массы урожая случаются редко. Поэтому из заданного параметра направления движения можно вывести и учесть информацию о том, где находится транспортный контейнер. В этих условиях можно управлять перегрузочным аппаратом соответствующим образом без обратной связи.
В предпочтительном варианте исполнения перегрузочное устройство выполнено с возможностью вычисления направления перегрузки по указанному задающему параметру направления движения сельскохозяйственной уборочной машины и, по меньшей мере, по заданной целевой дальности перегрузки, причем целевая дальность перегрузки, предпочтительно, является постоянным, характерным для машины, расстоянием. В предпочтительном варианте исполнения перегрузочного устройства целевая дальность перегрузки является расстоянием между шарнирным сочленением рамы и седельным соединительным устройством и, предпочтительно, вычисляется из положения определяющих целевую дальность перегрузки элементов перегрузочного аппарата.
Для этого устройство включает в себя электронный вычислительный блок со средствами считывания для определения относительного углового положения параметра, задающего направление движения сельскохозяйственной уборочной машины, и по меньшей мере относительного углового положения перегрузочного аппарата по отношению к продольному направлению сельскохозяйственной уборочной машины. Далее, электронный вычислительный блок связан с системой передачи данных уборочной машины, что позволяет использовать информацию о других параметрах уборочной машины, таких как, например, скорость движения и положение других направляющих элементов на перегрузочном аппарате, для целей ориентации перегрузочного аппарата.
Электронный вычислительный блок определяет параметр, задающий направление движения уборочной машины, и затем с учетом других параметров вычисляет заданный угол положения разгрузочной трубы. Из рассогласования действительного угла положения разгрузочной трубы с заданным углом положения разгрузочной трубы выводится управляющая величина для регулирования поворота перегрузочного аппарата. При повороте с помощью известных средств регулирования, таких как, например, электрогидравлический механизм поворота, скорость поворота выбирается в зависимости от управляющей величины.
Вычисление заданной величины для перегрузочного аппарата может осуществляться на основе простых испытаний. Необходимый для направленной перегрузки угол установки перегрузочного аппарата к продольному направлению машины, называемый далее углом положения разгрузочной трубы, может быть определен эмпирически и записан в памяти электронного вычислительного блока в виде полей данных или в виде разработанной по ним графической характеристики.
Далее, имеется возможность осуществлять управление перегрузочным аппаратом на основе определенных величин путем теоретического расчета.
В уборочной машине с управлением поворотом путем излома шарнирно-сочлененной рамы и установкой транспортного контейнера непосредственно на раме машины угол положения разгрузочной трубы может регулироваться таким образом, что убранная масса будет перегружаться, например, в направлении средней части транспортного контейнера.
Если устройство используется в уборочной машине с управлением поворотом путем излома шарнирно-сочлененной рамы и с седельным полуприцепом, угол положения разгрузочной трубы может регулироваться таким образом, что убранная масса будет перегружаться в направлении центра седельного соединительного устройства. В данном случае исходят из того, что транспортный контейнер находится над седельным соединительным устройством.
В обоих случаях необходимая заданная величина угла положения разгрузочной трубы может быть вычислена из геометрических размеров уборочной машины и действительного угла излома в шарнирном сочленении рамы. Конкретное место попадания потока убранной массы в транспортный контейнер зависит от степени его заполнения и от установки других направляющих поток элементов, в частности от высотного положения разгрузочной трубы или положения направляющей заслонки разгрузочной трубы.
Для процесса перегрузки, при котором отсутствует непосредственное соединение с транспортным контейнером, управление углом положения разгрузочной трубы может осуществляться по параметру, задающему направление движения и целевой дальности перегрузки. Указанная дальность перегрузки может быть предварительно заданным постоянным расстоянием или величиной, которую может задавать водитель машины. Кроме того, целевая дальность перегрузки может быть рассчитана из положения определяющих дальность перегрузки элементов перегрузочного аппарата. Дальность перегрузки может быть выведена из установочных положений перегрузочного аппарата, при этом в расчете дальности прицельной перегрузки учитываются, например, высота разгрузочной трубы, установка направляющей заслонки и целевая высота перегрузки на транспортном контейнере.
В одном из примеров выполнения предусмотрено программирование целевой дальности перегрузки в устройстве. Это может быть выполнено посредством воздействия на специально предусмотренные для этого клавиши программирования. Так, например, направление перегрузки устанавливается вручную таким образом, что поток убранной массы перегружается в середину транспортного контейнера. Затем эта дальность перегрузки вводится в программу в качестве целевой дальности перегрузки. Тогда при дальнейшем автоматическом управлении перегрузочным аппаратом уже не будут учитываться вводимые вручную изменения дальности перегрузки, например установка направляющей заслонки разгрузочной трубы.
Поворот перегрузочного аппарата производится, например, посредством гидравлического двигателя. В другом исполнении изобретения может быть предусмотрен поворот перегрузочного аппарата с регулируемой скоростью. Инерционность перегрузочного аппарата приводит к тому, что при автоматическом управлении поворотом поворотное устройство совершает еще некоторый поворот после выключения привода поворота. Указанная проблема может решаться двумя путями. Во-первых, можно выключать привод до достижения заданного положения, и, во-вторых, можно регулировать скорость поворота с ее снижением до нулевой при подходе к заданному положению. Изменение скорости поворота требует специального управления посредством пропорциональных гидравлических клапанов. Простое решение проблемы достигается с помощью многоступенчатого регулирования скорости поворота. В простейшем случае оно производится посредством двухступенчатого действия клапанов. Скорость поворота при автоматическом управлении определяется величиной требуемого поворота. При переходе через определенную величину в сторону уменьшения привод поворота переключается на пониженную скорость. Таким образом, обеспечивается высокая точность управления ориентированием перегрузочного аппарата в заданном направлении перегрузки.
В другом исполнении предусмотрено, что устройство учитывает также след движения сельскохозяйственной уборочной машины. Как уже было упомянуто, в процессе перегрузки транспортный контейнер следует на некотором расстоянии за уборочной машиной. Если оператор машины выбирает новое направление движения, то есть уборочная машина движется дальше с измененным радиусом кривизны, изменяется также относительное направление перегрузки от перегрузочного аппарата к транспортному контейнеру.
Для перегрузки в транспортный контейнер, непосредственно соединенный с уборочной машиной, перегрузочный аппарат может быть установлен в новом требуемом направлении перегрузки без промедления. Однако если непосредственного соединения нет, управление перегрузочным аппаратом должно производиться на протяжении определенного отрезка пути. Поскольку транспортный контейнер следует сзади, сначала он должен оставаться на следе или прежнем пути движения уборочной машины до начала движения по кривой нового радиуса. Поэтому направление перегрузки должно регулироваться таким образом, чтобы поток убранной массы попадал в транспортный контейнер, находящийся на следе движения машины.
Было обнаружено особое преимущество управления направлением перегрузки на основе следа прежнего пути движения. Для нового радиуса кривизны или новой величины параметра, задающего направление движения сельскохозяйственной уборочной машины, устройство задает новый заданный угол положения разгрузочной трубы, однако он устанавливается устройством не сразу, а в зависимости от длины участка следа. Зависимость является, например, линейной. Длина участка следа может быть выведена простым образом по данным скорости движения.
В другом исполнении предусмотрено регулирование скорости поворота перегрузочного аппарата в зависимости от скорости движения машины. При этом изменения направления перегрузки выполняются также в зависимости от пути движения, то есть с задержкой по времени. Управление по пройденному следу имеет то преимущество, что при остановках машины с одновременным изменением величины параметра, задающего направление движения, не происходит автоматического изменения направления перегрузки.
Еще в одном исполнении устройства след прежнего пути записывается в запоминающем устройстве, например, выполненном на тороидальных магнитах, как и задающий параметр направления движения. Из записанных в памяти величин могут быть определены параметры следа пройденного пути. Благодаря применению такого запоминающего устройства для использования сохраняется только небольшое количество данных для расчета следа прежнего пути. Это содержание памяти обновляется новой парой данных через определенные промежутки времени или, в преимущественном варианте, после прохождения определенного участка пути.
При наличии дополнительных данных, таких как запрограммированная дальность и целевая высота перегрузки, перегрузочный аппарат управляется таким образом, что поток убранной массы попадает в транспортный контейнер, находящийся на следе прежнего пути движения. Величина участка следа рассчитывается в каждой текущей позиции по отдельным записанным в памяти парам величин. Отдельные пары величин включают участок следа движения и относящуюся к нему величину параметра, задающего направление движения. Из этих двух величин может быть определено изменение положения уборочной машины в системе координат, совмещенной с мгновенным направлением движения. Вычисление следа прежнего движения не является очень точным. Изменения величины задающего параметра направления движения сельскохозяйственной уборочной машины не воспринимаются в промежутке между запоминанием двух соседних пар величин. В дополнение к этому на пути движения может происходить пробуксовка. Если направление перегрузки ориентировано неточно, эта неточность компенсируется вначале за счет ширины транспортного контейнера и затем заключительной корректировкой курса движения транспортного средства.
Далее, предусмотрено, что автоматически управляемый перегрузочный аппарат может быть выполнен с возможностью корректировки направления перегрузки посредством ручного управления. Управление перегрузочным аппаратом может в любой момент осуществляться вручную без отключения при этом автоматического управления. Эти вводимые вручную изменения будут сохраняться до следующего введения вручную изменения или до выключения устройства.
Для включения или выключения устройства предусмотрен простой клавишный выключатель, связанный с управляющим устройством. Это может быть, например, педаль в полу у места водителя сельскохозяйственной уборочной машины. Включение или выключение устройства указывается посредством акустического сигнала или оптического индикатора, например оповещателя.
Изобретение не ограничивается применением для управления направлением перегрузки убранной массы урожая от сельскохозяйственной уборочной машины в следующий за ней транспортный контейнер. Специалисту в данной области понятно, что можно использовать параметр, задающий направление движения сельскохозяйственной уборочной машины, для управления другими функциями перегрузочного аппарата. Так, вполне возможно использовать задающий параметр направления движения сельскохозяйственной уборочной машины также для управления дальностью перегрузки или также в определенных пределах для управления перегрузочным аппаратом при движении уборочной машины по криволинейному пути с перегрузкой убранной массы на параллельно движущийся транспортный контейнер. Далее, можно использовать направление перегрузки для установочной регулировки направляющей заслонки на разгрузочной трубе или для изменения угла положения разгрузочной трубы перегрузочного аппарата на самоходном полевом измельчителе для получения его колебательного распределительного движения.
Краткий перечень чертежей
Далее изобретение будет описано более подробно на примерах выполнения со ссылками на чертежи.
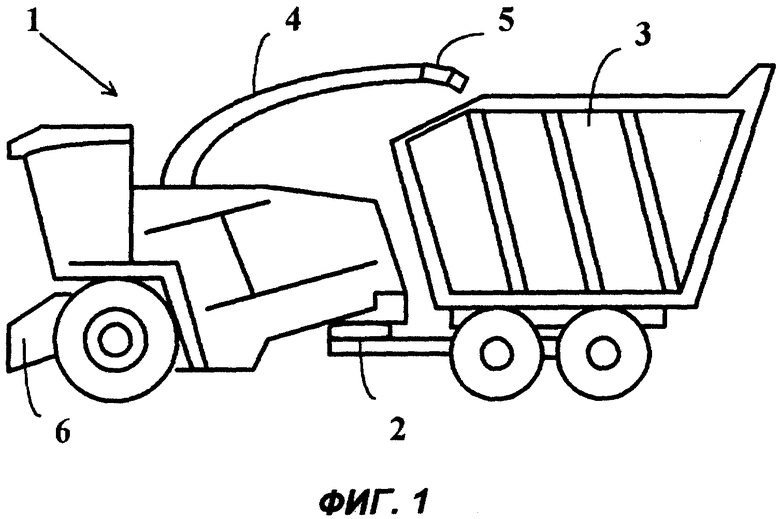
Фиг.1 изображает самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы и транспортным контейнером непосредственно на раме.
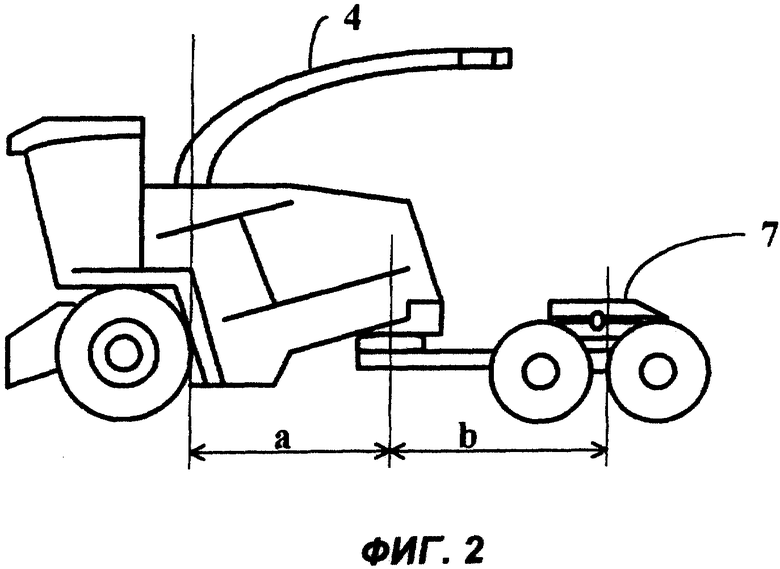
Фиг.2 изображает на виде сбоку самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы и седельным соединительным устройством для полуприцепа.
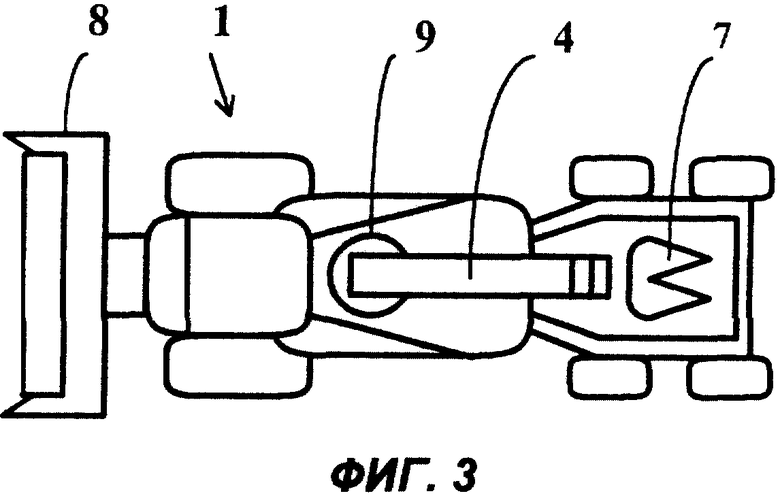
Фиг.3 изображает на виде сверху самоходный полевой измельчитель с управлением поворотом и седельным соединительным устройством для полуприцепа.
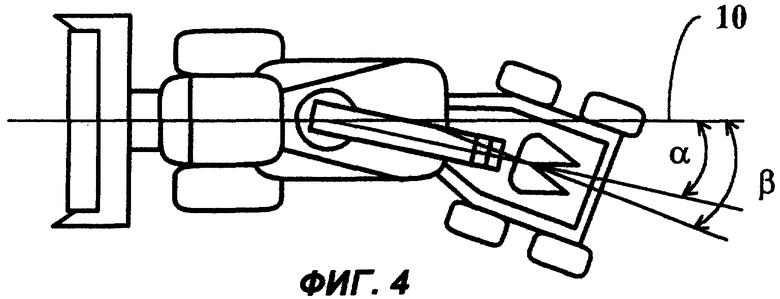
Фиг.4 изображает на виде сверху самоходный полевой измельчитель по фиг.3 с данными углов установки разгрузочной трубы и шарнирно-сочлененной рамы.
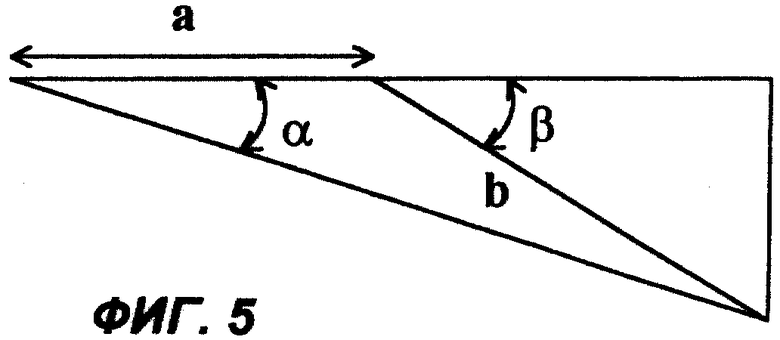
Фиг.5 изображает схему геометрических размеров уборочной машины по фиг.2 и 4.
Фиг.6 изображает на виде сбоку самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы и навешенным полуприцепом.
Фиг.7 изображает на виде сверху самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы и навешенным полуприцепом.
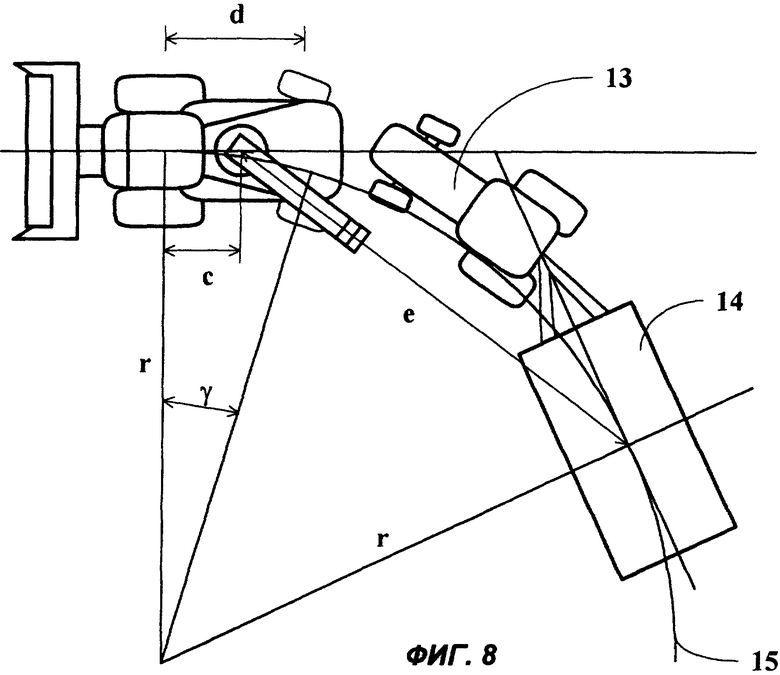
Фиг.8 изображает на виде сверху самоходный полевой измельчитель с рулевым управлением и следующий за ним тягач с прицепным транспортным контейнером.
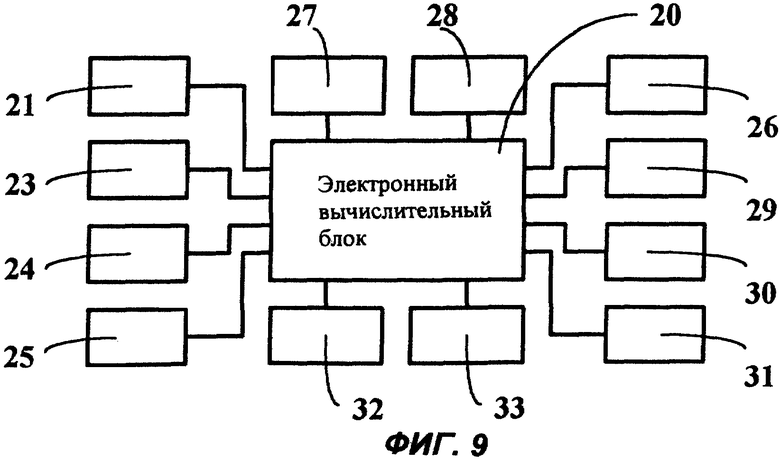
Фиг.9 изображает блок-схему устройства.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 изображен самоходный полевой измельчитель 1 с управлением поворотом путем излома шарнирного сочленения 2 шарнирно-сочлененной рамы и транспортным контейнером 3, установленным непосредственно на раме. Убираемая масса захватывается с площади уборки передним аппаратом машины, не показанным на чертеже, и подается через питатель 6 к следующему узлу переработки. Затем обработанная масса перегружается с помощью регулируемой по высоте разгрузочной трубы 4 в транспортный контейнер. Разгрузочная заслонка 5 придает направление перегрузки разгрузочному потоку. Далее перегрузка массы из заполненного контейнера производится путем его опрокидывания или с помощью донного скребкового конвейера.
Фиг.2 изображает на виде сбоку самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы и седельным соединительным устройством 7 для полуприцепа. Расстояние а представляет расстояние между вертикальной осью поворота разгрузочной трубы 4 и центром поворота шарнирного сочленения 2 рамы. Расстояние b представляет расстояние между шарнирным сочленением 2 и седельным соединительным устройством 7 для полуприцепа.
Фиг.3 представляет на виде сверху самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы с седельным соединительным устройством 7 для полуприцепа и передним уборочным аппаратом 8. Полевой измельчитель находится на прямом участке движения, и величина параметра, задающего направление движения уборочной машины, в данном случае угол в шарнирном сочленении 2 рамы, равна нулю. Перегрузочный аппарат, в данном исполнении разгрузочная труба 4, ориентирован таким образом, что собранная масса перегружается поверх седельного соединительного устройства. Поворотная установка перегрузочного аппарата поворотом вокруг вертикальной оси может производиться с помощью поворотного круга 9. Привод поворотного перегрузочного аппарата в полевом измельчителе производится простым путем с помощью гидравлического привода, управляемого с помощью электрогидравлической системы клапанов, в направлении, заданном устройством управления. Относительное положение перефузочного аппарата относительно продольной оси машины воспринимается с помощью считывающего средства, такого как датчик приращений с опознаванием направления поворота, и подается к электронному вычислительному блоку.
На фиг.4 вновь представлен вид сверху, как и на фиг.3. Он отличается тем, что самоходный полевой измельчитель находится в повернутом положении шарнирного сочленения рамы. Угол β представляет угол излома в шарнирном сочленении рамы. Этот угол является заданной величиной для управления направлением перегрузки разгрузочной трубы 4. Угол α обозначает действительный угол перегрузочного аппарата относительно продольной оси 10 машины. На этом чертеже направление перегрузки отрегулировано таким образом, что собранная масса транспортируется поверх седельного соединительного устройства.
Для вычисления угла перегрузки на фиг.5 представлены вместе расчетные величины из фиг.2 и 4. Расстояния а и b известны из геометрических размеров уборочной машины. Величина угла β определяется считывающим средством в шарнирном сочленении рамы. Из этих известных величин угол α установки перегрузочного аппарата может быть вычислен из уравнения
На основе этого уравнения перегрузочный аппарат может управляться таким образом, что поток убранной массы всегда будет перегружаться поверх седельного соединительного устройства. Однако уравнение может использоваться также для управления перегрузочным аппаратом при установке транспортного контейнера непосредственно на шарнирно-сочлененной раме. Расстояние b задает удаленную от шарнирного сочленения точку, поверх которой должен проходить поток убранной массы. Это расстояние b может вводиться в электронный вычислительный блок в качестве заданной величины с помощью простого задающего устройства, например потенциометра. Изменение в зависимости от дальности перегрузки перегрузочного аппарата является дальнейшей возможностью. С помощью указанных заданных величин перегрузочный аппарат управляется таким образом, что поток собранной массы перегружается в направлении указанной точки или поверх нее.
На фиг.6 представлен на виде сбоку самоходный полевой измельчитель с управлением поворотом путем излома шарнирно-сочлененной рамы и с навешенным седельным полуприцепом. Этот полуприцеп может быть легко отсоединен от седельного соединительного устройства 7 самоходного полевого измельчителя и заменен на пустой полуприцеп. При таком способе перевозки транспортного контейнера 11 имеется возможность определять угол между продольной осью транспортного контейнера 11 и седельным соединительным устройством 7. На основании этой считываемой величины может осуществляться расширенное управление перегрузочным аппаратом. В этом случае перегрузочный аппарат может также устанавливаться в положение отклонения от седельного соединительного устройства 7. Кроме того, можно направить перегрузочный аппарат на точку, лежащую позади седельного соединительного устройства. С помощью определяемой дальности перегрузки можно также изменять целевую дальность перегрузки с достижением надежной перегрузки.
На фиг.7 показано следующее положение уборочной машины по фиг.6. Полевой измельчитель движется по криволинейному пути. При этом разгрузочная труба 4 направлена таким образом, что направление перегрузки ориентировано на седельное соединительное устройство 7.
На фиг.8 представлен самоходный полевой измельчитель с рулевым управлением и следующий за ним тягач 13 с прицепным транспортным контейнером 14. Трасса движения представляет собой криволинейный путь 15 с постоянным радиусом кривизны. Из угла γ рулевого поворота и базы d между осями уборочной машины может быть вычислен радиус r кривизны. При задании дальности перегрузки е и допущении, что расстояние с очень мало по сравнению с дальностью перегрузки, можно вычислить угол α положения разгрузочной трубы с помощью тригонометрии с использованием катетов по следующему уравнению:
На фиг.9 представлена блок-схема устройства. Устройство состоит из электронного вычислительного блока 20, датчиков и исполнительных устройств. Управление перегрузочным аппаратом приводится в действие или отключается с помощью клавишного выключателя 21. Состояние устройства указывается оптическим или акустическим индикатором 31. Заданная величина дальности е перегрузки может быть выбрана с помощью оснащенного шкалой потенциометра. Если дальность е прицельной перегрузки должна быть выведена из текущих данных устройств 24, 25, 26 установки перегрузочного аппарата и заданной высоты, это может осуществляться с помощью датчика 23. Угол α положения разгрузочной трубы и угол разгрузочной заслонки воспринимается считывающими средствами 24 и 25 соответственно, предпочтительно в виде данных от потенциометров. Высотное положение перегрузочного аппарата выводится из высотного угла 26 разгрузочной трубы. Для ручного управления перегрузочным аппаратом, а также для введения заданной величины смещения предусмотрены дополнительные датчики 27 и 28 соответственно. Параметр, задающий направление движения сельскохозяйственной уборочной машины, вводится считывающим устройством 30. Электронный вычислительный блок 20 связан далее с системой 29 передачи данных уборочной машины. Через нее передаются специфические данные машины, такие как величина базы между осями и другие необходимые геометрические данные, а также данные перегрузки, например целевая высота разгрузки, и переменные параметры, например скорость движения. Для управления перегрузочным аппаратом электронный вычислительный блок 20 связан с регулирующими элементами 32, 33. Указанные регулирующие элементы могут быть выполнены в виде гидравлических систем с насосом и двигателем или, как представлено в данном исполнении, в виде двух электрогидравлических клапанов для простого управления гидравлическим двигателем по типу влево/вправо.


Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах управления перегрузочным аппаратом сельскохозяйственных машин. Перегрузочный аппарат выполнен в виде поворотной разгрузочной трубы и связан с механизмом поворота для направления в транспортный контейнер потока убранной и обработанной массы. Управление поворотом перегрузочного аппарата производят путем вычисления заданного угла установки перегрузочной трубы относительно продольной оси уборочной машины с учетом следа движения транспортного контейнера и направления движения сельскохозяйственной уборочной машины. Угол между перегрузочным аппаратом и продольным направлением машины выполнен регулируемым в соответствии с задающим направление движения машины параметром, что обеспечивает высокую точность управления ориентированием перегрузочного аппарата в заданном направлении перегрузки. 16 з.п. ф-лы, 9 ил.
| Устройство для мытья и стерилизации столовой посуды | 1959 |
|
SU125007A1 |
| СПОСОБ ЗАПИСИ ВИДЕОИНФОРМАЦИИ НА НОСИТЕЛЕ ЗАПИСИ, НОСИТЕЛЬ ЗАПИСИ И УСТРОЙСТВА ДЛЯ ПОИСКА И ВОСПРОИЗВЕДЕНИЯ ИЗОБРАЖЕНИЯ | 1991 |
|
RU2073914C1 |
| Предохранительное устройство для самовсасывающего центробежного насоса | 1945 |
|
SU70015A1 |
| СИЛОСОУБОРОЧНЫЙ КОМБАЙН | 0 |
|
SU188774A1 |
| 1972 |
|
SU409667A1 | |
| Трубопровод к навесному измель-чителю соломы зерноуборочногокомбайна | 1973 |
|
SU509259A1 |
| DE 19612053 А1, 02.10.1977 | |||
| DE 3533773 А1, 26.03.1987 | |||
| ВПИТЫВАЮЩЕЕ ИЗДЕЛИЕ | 2019 |
|
RU2756539C1 |

