Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для управления перегрузочным устройством в соответствии с ограничительной частью пунктов 1 и 8 формулы изобретения.
Уровень техники
Самоходные уборочные машины, такие как полевые измельчители или зерноуборочные комбайны, обычно снабжены перегрузочным устройством, с помощью которого убранная масса перегружается на транспортное средство или в приемную емкость. Так, при работе полевого измельчителя во время рабочего прохода убранная масса постоянно перегружается с помощью перегрузочного устройства на транспортное средство, движущееся рядом. Для этого транспортное средство должно двигаться параллельно полевому измельчителю или рядом с ним. При этом водитель полевого измельчителя должен все время контролировать положение транспортного средства по отношению к полевому измельчителю, чтобы обеспечивать точную перегрузку убранной массы без потерь. При отклонении положений полевого измельчителя относительно транспортного средства водитель полевого измельчителя должен вручную корректировать перегрузку убранной массы посредством регулировки положения перегрузочного устройства или посредством регулировки перегрузочной заслонки, расположенной на конце перегрузочного устройства.
В патентном документе ЕР 1454520 А1 раскрыто устройство управления перегрузочным устройством на сельскохозяйственной машине. Для лучшей перегрузки убранной массы на транспортное средство это устройство управления производит управление положением перегрузочного устройства в зависимости от положения первого исполнительного элемента относительно положения второго исполнительного элемента, при этом установка исполнительных элементов определяет установку перегрузочного устройства.
Таким путем достигается автоматическое согласование положений исполнительных элементов относительно друг друга, так что водителю полевого измельчителя не нужно регулировать вручную положение второго исполнительного элемента при регулировке положения первого исполнительного элемента для приведения его в соответствия с изменившейся ситуацией, поскольку регулировка положения второго исполнительного элемента производится автоматически системой управления. За счет этого должна достигаться перегрузка убранной массы с управлением без участия водителя.
Недостаток такого решения управления перегрузочным устройством заключается в том, что водитель сельскохозяйственной уборочной машины должен и дальше производить управление поворотом перегрузочного устройства и координацию движения с транспортным средством, движущимся рядом или сзади, для перегрузки без потерь. Это означает, что если водитель повернет перегрузочное устройство на слишком большой или недостаточный угол относительно транспортного средства, убранная масса будет подаваться мимо транспортного средства и останется лежать на поле в качестве потерь.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и обеспечения для водителя сельскохозяйственной уборочной машины возможности простого процесса перегрузки без потерь.
В соответствии с изобретением решение поставленной задачи достигается в системе управления перегрузкой для управления потоком убранной массы, выходящим из перегрузочного устройства уборочной сельхоз машины, причем перегрузочное устройство на своем конце оснащено перегрузочной заслонкой, а убранная масса передается на транспортное устройство. Согласно изобретению система охватывает определение относительного положения, управление выходным потоком убранной массы и направляющую систему для водителя, причем точка падения потока убранной массы в области транспортного средства определяется установкой перегрузочного устройства и перегрузочной заслонки, а установка перегрузочного устройства и установка перегрузочной заслонки определяется в математической модели посредством векторов.
За счет того, что система управления перегрузкой охватывает определение относительного положения, управление выходным потоком убранной массы и направляющую систему для водителя, водитель сельскохозяйственной уборочной машины в значительной мере освобожден от постоянного контроля процесса перегрузки во все время рабочего прохода уборки. Кроме того, обеспечивается точная перегрузка убранной массы на транспортное устройство без потерь.
За счет того, что определение относительного положения производится между уборочной машиной и по меньшей мере одним транспортным устройством, может точно определяться расстояние перегрузки между ними, которое необходимо преодолеть для целей перегрузки без потерь.
За счет того, что управление выходным потоком убранной массы охватывает скоординированное управление установкой перегрузочного устройства и установкой перегрузочной заслонки, обеспечивается точная координация между изменением положения перегрузочного устройства и изменением положения перегрузочной заслонки.
За счет определения установки перегрузочного устройства и установки перегрузочной заслонки посредством различных векторов может точно определяться точка падения потока, так что эта точка падения потока всегда оптимально лежит в пределах транспортного устройства.
В особенно предпочтительном примере осуществления точка падения потока убранной массы ведется вдоль определенной геометрии. Это ведение точки падения потока вдоль определенной геометрии обеспечивает надежную перегрузку убранной массы на транспортное устройство без потерь. За счет этого водитель сельскохозяйственной уборочной машины в особенно значительной мере освобожден от управления положением точки падения потока и от постоянного наблюдения за процессом перегрузки, так что он может сконцентрироваться на процессе уборки поля.
Расположение точки падения потока в пределах виртуальной сетки обеспечивает точную перегрузку в области в пределах этой сетки.
При изменении условий уборки, например, при использовании транспортных устройств других размеров, виртуальная сетка может быть в любой момент адаптирована к этим изменившимся условиям путем изменения величины и/или положения виртуальной сетки.
За счет подразделения виртуальной сетки по величине на изменяемые виртуальные участки достигается особенно точное ведение точки падения потока убранной массы в пределах участков, лежащих в пределах сетки.
Это точное ведение точки падения потока в пределах виртуальной сетки и виртуальных участков простейшим образом достигается посредством нажатия на кнопки общеизвестного рычага управления перегрузочным устройством. В зависимости от нажатия на одну кнопку или на неоднократного нажатия на несколько кнопок может быть выбран определенный участок. Тот же принцип управляемости применим ко всей виртуальной сетке.
Поворот перегрузочного устройства может производиться в зависимости от положения и/или величины виртуальной сетки. Область поворота перегрузочного устройства может определяться посредством виртуальных участков.
В особенности равномерное заполнение транспортного устройства достигается за счет того, что точка падения потока лежит на прямой или криволинейной траектории.
Кроме того, равномерное заполнение транспортного устройства обеспечивается за счет того, что организация перемещения точки падения потока осуществляется транспортным устройством.
Особенное освобождение водителя от нагрузки достигается в том случае, когда перегрузочное устройство поворачивается автоматически. В качестве альтернативы остается возможность для водителя в любой момент вручную вносить коррективы в управление перегрузочным устройством.
Предпочтительно система выполнена с возможностью принимать сигналы для определения относительного положения между уборочной машиной и транспортным устройством через систему GPS, а также сигналы для определения управления выходным потоком убранной массы от положения перегрузочного устройства и перегрузочной заслонки обрабатывать эти сигналы и предоставлять их посредством направляющей системы для водителя для индикации водителю сельскохозяйственной уборочной машины.
Перечень фигур чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
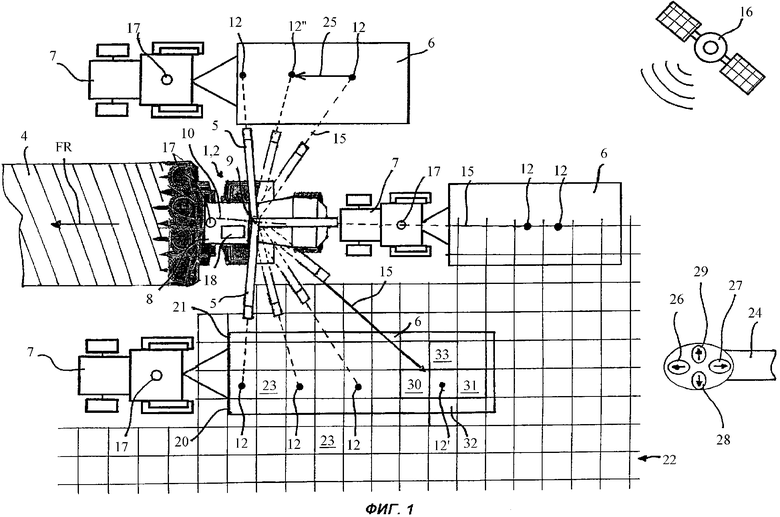
фиг.1 изображает на виде сверху полевой измельчитель и различные тягачи с прицепными транспортными средствами, движущиеся рядом и сзади,
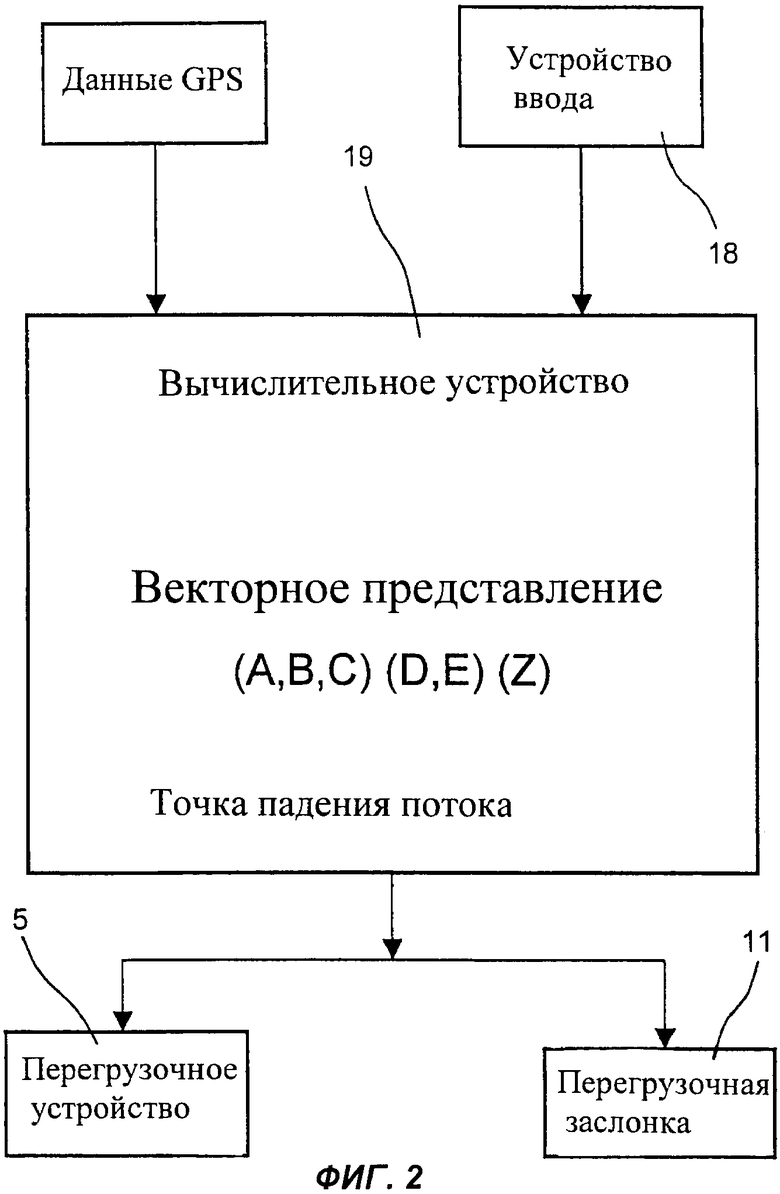
фиг.2 изображает блок-схему системы управления перегрузкой по фиг.1,
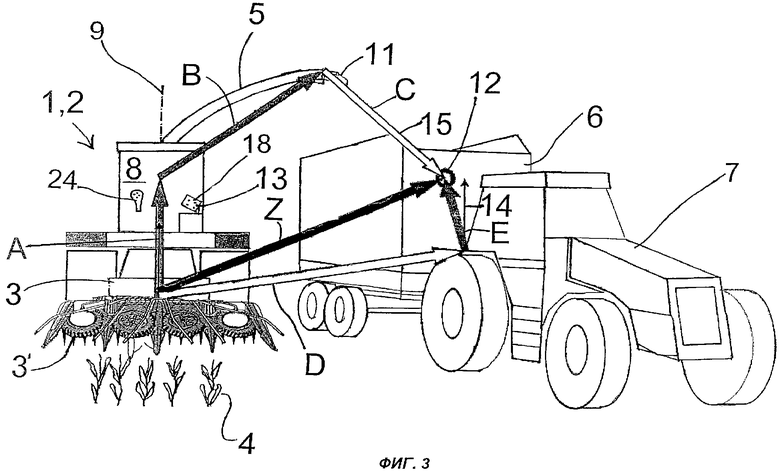
фиг.3 изображает на виде спереди сельскохозяйственную уборочную машину в виде полевого измельчителя и движущийся рядом тягач.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 показана на виде сверху сельскохозяйственная уборочная машина 2 в виде полевого измельчителя 1. Спереди полевой измельчитель оснащен передним навесным аппаратом 3 с передней приставкой 3' для уборки кукурузы. Эти аппараты производят срезание убираемой массы 4, ее прием и подачу к непоказанному измельчительному устройству.
Измельченная убранная масса 4 далее перегружается с помощью перегрузочного устройства 5 на транспортное устройство 6. Транспортное устройство 6 прицеплено к тягачу 7, который в идеальном случае движется параллельно рядом с полевым измельчителем или непосредственно позади него. Перегрузочное устройство 5, расположенное за кабиной 8 водителя, известным образом может поворачиваться вокруг вертикальной оси 9, а также вокруг горизонтальной оси 10 для регулирования установки по высоте. Кроме того, дальность выбрасываемого потока убранной массы может регулироваться с помощью перегрузочного козырька или заслонки 11, установленной с возможностью подъема и опускания. При повороте перегрузочной заслонки 11 вверх дальность потока увеличивается, а при ее повороте вниз уменьшается.
Во время рабочего прохода уборки перед водителем сельскохозяйственной уборочной машины 2 стоит проблема равномерной уборки убираемой массы 4, чтобы на поле не оставалось растительности, и одновременно перегрузки обработанной убранной массы 4 на транспортное устройство 6 без потерь. В отношении перегрузки убранной массы 4 на транспортное устройство 6 водитель уборочной машины 2 должен постоянно наблюдать за областью перегрузки, чтобы точно определять точку 12 падения потока убранной массы в транспортное устройство 6. Это является постоянной нагрузкой для водителя в дополнение к необходимости вести машину точно по курсу во время рабочего прохода.
В соответствии с изобретением система управления перегрузкой освобождает водителя от этого постоянного контроля за счет того, что эта система охватывает определение относительного положения, управление выходным потоком убранной массы и направляющую систему для водителя. Таким образом, оптимально регулируется положение точки 12 падения потока убранной массы относительно транспортного устройства 6, так что водитель может лучше сконцентрировать свое внимание на процессе уборки.
Определение относительного положения сельскохозяйственной уборочной машины 2 в виде полевого измельчителя 1 и перемещаемого тягачом 7 транспортного устройства 6 осуществляется с помощью общеизвестной системы GPS (Global Positioning System - глобальная система навигации и определения местоположения). С помощью спутников 16 системы GPS через равные промежутки времени передаются сигналы идентификации, положения и времени, которые принимаются антеннами 17 системы GPS, расположенными на тягаче 7 и полевом измельчителе 1. Посредством приема сигналов системы GPS и вычисления определяется положение тягача 7 и прицепного к нему транспортного устройства 6 относительно полевого измельчителя 1. Данные системы GPS, а также данные о действительном положении перегрузочного устройства 5 и перегрузочной заслонки 11 передаются на не показанный модуль, в котором производится вычисление положения точки 12 падения потока. В рамках общей математической модели на основе определения относительного положения вычисляется оптимальная и желаемая точка 12 падения потока в пределах транспортного устройства 6. Результат этого вычисления включается в управление перегрузочной заслонкой 11 и перегрузочным устройством 5, посредством которого регулируется направление потока 15 убранной массы и соответственно точка 12 падения потока убранной массы 4 в пределах транспортного устройства 6.
Во время рабочего прохода уборки водитель полевого измельчителя 1 освобождается от нагрузки за счет того, что точка 12 падения потока ведется вдоль определенной геометрии. Эта определенная геометрия может быть преобразована, например, в форму виртуальной сетки 22, которая полностью или частично окружает область полевого измельчителя 1.
Положение и величина виртуальной сетки 22 является изменяемой и предпочтительно сетка может быть помещена на высоте верхней кромки боковой стенки 21 транспортного устройства 6. За счет этого обеспечивается уверенность в том, что поток 15 убранной массы не будет идти слишком низко и не будет наталкиваться на боковую стенку 21 транспортного устройства 6 и оставаться на земле в качестве потерь.
Предпочтительным образом виртуальная сетка 22 подразделена на множество виртуальных участков 23. За счет управляемости виртуальной сетки 22 и соответственно виртуальных участков 23 водитель полевого измельчителя 1 имеет возможность направлять поток 15 убранной массы точно в пределах этой виртуальной сетки 22 и участка 23.
С помощью многофункционального рычага или джойстика 24, расположенного в кабине 8, водитель полевого измельчителя 1 может изменять положение перегрузочного устройства 5 и перегрузочной заслонки 11, а следовательно, и направление потока 15 убранной массы. После этого производится регулировка по виртуальной сетке 22 и составляющим ее виртуальным участкам 23. Регулировка осуществляется водителем в зависимости от воздействия на джойстик 24, то есть от нажатия на управляющие элементы 26, 27, 28, 29 джойстика 24. Показанные на фиг.1 (справа) управляющие элементы 26, 27, 28, 29 определяют возможные направления движения перегрузочного устройства 5 для наведения на определенные виртуальные участки 23. В базовом примере выполнения это означает, что в нейтральном положении джойстика 24 точка 12' падения потока остается неизменной.
При воздействии на управляющий элемент 26 точка 12' падения потока перемещается в направлении FR движения машины от виртуального участка 23 на виртуальный участок 30. При воздействии на управляющий элемент 27 точка 12' падения потока перемещается из упомянутого нейтрального положения против направления FR движения машины от виртуального участка 23 на виртуальный участок 31. Если водитель полевого измельчителя 1 нажимает на управляющий элемент 28, точка 12' падения потока перемещается из нейтрального положения влево от виртуального участка 23 на виртуальный участок 32, а при нажатии на управляющий элемент 29 - вправо на виртуальный участок 33. В рамках изобретения предусмотрено, что посредством неоднократного нажатия на соответствующий управляющий элемент 26, 27, 28 или 29 можно последовательно пройти несколько виртуальных участков 23, за счет чего водитель достигает быстрой и точной регулировки положения перегрузочного устройства 5 и точного заполнения транспортного устройства 6.
В процессе уборки перемещение точки 12' падения потока производится исключительно в пределах транспортного устройства 6 для обеспечения оптимальной перегрузки обработанной убранной массы в транспортное устройство 6 без потерь.
Указанная выше регулировка точки 12 падения потока и связанного с ней процесса перегрузки применима в каждом положении транспортного устройства 6 по отношению к сельскохозяйственной уборочной машине 2.
Вместо использования и перемещения точки 12 падения потока в пределах виртуальной сетки 22 или виртуальных участков 23 возможно перемещение точки 12 падения потока к точке 12” падения потока вдоль прямой линии (см. фиг.1 сверху). При этом перемещение от точки 12 к точке 12” производят посредством управляющего элемента 26, а участок 25 перемещения по прямой определяется временем воздействия на управляющий элемент 26. В отношении остальных управляющих элементов 27, 28, 29 действительным остается описанное выше.
За счет того, что величины виртуальных участков 23 являются изменяемыми, водитель полевого измельчителя может определять, хочет ли он производить быструю регулировку по большим виртуальным участкам 23 или медленную и точную регулировку по малым виртуальным участкам 23.
В целом перегрузка обработанной убранной массы 4 ориентируется на положение и величину виртуальной сетки 22, а также на положение и величину виртуальных участков 23. Таким образом, область поворота перегрузочного устройства 5 определяется виртуальной сеткой 22 и виртуальными участками 23.
На фиг.2 представлена блок-схема системы управления перегрузкой. Как уже было описано со ссылкой на фиг.1, сигналы системы GPS об относительном положении полевого измельчителя 1 и тягача 7 с прицепным к нему транспортным устройством 6 передаются на вычислительное устройство 19, которое может быть выполнено в виде модуля.
В устройство 18 ввода водитель уборочной машины 2 может ввести граничные величины, влияющие на перегрузку на транспортное устройство 6 без потерь. Так например, существенными факторами влияния на перегрузку убранной массы являются крыша кабины уборочной машины 2 или высота бортов 20, 21 перегрузочного устройства. Величина и расположение кабины самоходного полевого измельчителя 1 ограничивает возможность поворота перегрузочного устройства 5 в передней области машины, так как при слишком сильном повороте перегрузочного устройства 5 в направлении FR движения оно может натолкнуться на кабину. Что касается высоты бортов 20, 21 транспортного устройства 6, она определяет минимальную высоту потока убранной массы при ее перегрузке на транспортное устройство 6. Следует отметить, что указанные граничные величины не являются исчерпывающими, - их количество может быть любым.
Введенные граничные величины передаются на вычислительное устройство 19 и включаются вместе с сигналами системы GPS в процесс вычисления точки 12 падения потока. Точка 12 падения потока определяется в зависимости от полученных сигналов системы GPS и сигналов граничных величин с помощью математической модели, которая из векторов А, В, С, D, Е, представленных на фиг.3, дает в итоге положение точки 12 падения потока посредством суммы векторов А, В, С или суммы векторов D и Е.
На основе полученных результатов вычисления вырабатывается сигнал, передаваемый на перегрузочное устройство 5 и перегрузочную заслонку.
В зависимости от этого выработанного сигнала осуществляется регулировка положения перегрузочного устройства 5 и перегрузочной заслонки 11, так что их установка определяет точку 12 падения потока убранной массы 4 в пределах перегрузочного устройства 6 и обеспечивает перегрузку убранной массы без потерь и без участия водителя уборочной машины в процессе наблюдения за перегрузкой.
На фиг.3 для более подробного пояснения изобретения показан полевой измельчитель 1 и движущийся рядом с ним тягач 7 с прицепным перегрузочным устройством 6.
Определение относительного положения между полевым измельчителем 1 и транспортным устройством 6 в качестве задающих величин для определения точки 12 падения потока убранной массы 4 в пределах транспортного устройства 6 осуществляется с помощью спутниковой системы GPS навигации и определения местоположения, которая сама по себе известна, для целей установления положений полевого измельчителя 1 и транспортного устройства 6, а также вектора (Z) от полевого измельчителя 1 к точке цели, то есть к точке 12 падения потока на транспортное устройство 6.
Управление выходом потока убранной массы производится известным образом посредством регулировки перегрузочного устройства 5 и регулировки перегрузочной заслонки 11. При этом положение перегрузочного устройства 5 может изменяться, например, с помощью непоказанного поворотного механизма относительно горизонтальной оси 10 и также не показанного устройства с силовыми цилиндрами относительно вертикальной оси 9. За счет регулировки перегрузочной заслонки 11 может регулироваться дальность выброса убранной массы 4, при этом перемещение перегрузочной заслонки 11 скоординировано с горизонтальным и вертикальным перемещением перегрузочного устройства 5. Это означает, что если перегрузочное устройство опускается, то перегрузочная заслонка 5 поднимается на определенную величину, так что точка 12 падения потока всегда лежит на прямом участке 25 перемещения.
Направляющая система для водителя может указывать водителю оптимальное относительное положение полевого измельчителя 1 к транспортному устройству 6 в соответствии с действительным ходом перегрузки с помощью оптического индикаторного устройства 13 в кабине 8. Индикация действительного относительного положения в особенности важна на критических криволинейных участках рабочего прохода, поскольку в этих областях перегрузка убранной массы 4 без потерь отчасти невозможна из-за того, что кабина 8 ограничивает область поворота перегрузочного устройства 5.
Для оптимальной и беспрепятственной перегрузки обработанной убранной массы 4 на транспортное устройство 6 установка перегрузочного устройства 5 и перегрузочной заслонки 11 определяется в математической модели посредством различных векторов А, В, С, D, Е.
Определение векторов А, В, С, D, Е служит для выработки вектора Z. Вектор Z точки цели устанавливает оптимальную точку 12 падения потока обработанной убранной массы в пространстве транспортного устройства 6.
Вектор Z точки цели может вырабатываться различными путями. С одной стороны, может производиться вычисление по вертикальному вектору А, вектору В перегрузочного устройства и вектору С потока убранной массы, причем вектор А проходит параллельно вертикальной оси 14 транспортного устройства 6. Вектор В перегрузочного устройства определяется горизонтальным и вертикальным положением перегрузочного устройства 5, а вектор С потока убранной массы определяется направлением выброса убранной массы 4 из перегрузочного устройства 5. Сумма этих трех величин векторов А, В, С дает вектор Z точки цели. С помощью определения вектора Z точки цели определяется точка 12 падения потока 15 убранной массы в пространство транспортного устройства 6.
Альтернативно вычислению точки 12 падения потока 15 убранной массы по векторам А, В, С эта точка 12 падения потока может быть определена также по вектору D относительного положения и вектору Е точки погрузки. Вектор D относительного положения описывает положение полевого измельчителя 1 по отношению к перегрузочному устройству 6. Вектор Е точки погрузки описывает точку погрузки убранной массы 4 в пределах транспортного устройства 6. Сумма векторов D и Е вновь дает вектор Z точки цели, так что может быть определена точка 12 падения потока.
Поскольку во время рабочего прохода уборки убранная масса различным образом распределяется в транспортном устройстве 6, а количество убранной массы может доходить до различной высоты, предпочтительным является регулируемое положение точки 12 падения потока убранной массы. Так, водитель уборочной машины 2 может точно управлять потоком убранной массы путем перемещения точки 12 падения потока и обеспечивать полную загрузку транспортного средства.
Поскольку положение уборочной машины 2 относительно транспортного устройства, как правило, изменяется, например, из-за неточностей рулевого управления или из-за различных скоростей движения уборочной машины 2 и тягача 7, предпочтительно, чтобы вектор Z точки цели был изменяемым. Это означает, что изменение величин векторов А, В, С, D или Е не оказывает никакого влияния на точность перегрузки убранной массы, так как изменение величин векторов непосредственно привлекается к вычислению вектора Z точки цели, и производится новое установление и актуализация точки 12 падения потока 15 убранной массы, так что обработанная убранная масса продолжает перегружаться без потерь.
Предпочтительно точка 12 падения потока 15 убранной массы лежит на прямой по фиг.1. За счет расположения точки 12 падения потока на прямой в идеальном случае в середине транспортного устройства 6 убранная масса особенно равномерно перегружается на транспортное устройство, а конус естественного откоса убранной массы 4 может равномерно расширяться во все стороны в пределах транспортного устройства.
Кроме того, в рамках изобретения может быть предусмотрено расположение точки 12 падения потока на криволинейной траектории (не показано). При этом поток 15 убранной массы может перемещаться, например, в продольном направлении транспортного устройства 6 и от внутреннего борта 20 к противоположному внутреннему борту 21. За счет этого достигается особенно равномерное заполнение транспортного устройства 6, так как поток 15 убранной массы охватывает всю ширину и длину транспортного устройства 6.
И наконец, может быть предусмотрена организация перемещения точки 12 падения потока убранной массы через посредство транспортного устройства 6 или его тягача 7. В этом примере осуществления положение перегрузочного устройства выдерживается постоянным, а положение транспортного устройства 6 изменяется в зависимости от действительной степени заполнения. Для оказания помощи в изменении положения направляющая система для водителя указывает водителю тягача относительное положение между уборочной машиной 2 и транспортным устройством 6, так что водитель путем простого управления поворотом может оптимальным образом выровнять положение транспортного устройства 6 по отношению к перегрузочному устройству 5.
Как это было указано выше, водителю полевого измельчителя 1 надлежит по выбору управлять перегрузочным устройством 5 вручную или включить систему автоматического управления, которая, например, проходит, например, через определенные контуры регулирования.
Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации, не выходящие за пределы объема защиты, а также использование изобретения в других машинах.
Изобретение относится к сельскому хозяйству и может быть использовано для управления потоком убранной массы, выходящим из перегрузочного устройства сельскохозяйственной уборочной машины. Перегрузочное устройство имеет на своем конце перегрузочную заслонку и направляет убранную массу на транспортное устройство. Система управления охватывает определение относительного положения, управление выходным потоком убранной массы и направляющую систему для водителя. Точка падения убранной массы в емкость транспортного устройства определяется установкой перегрузочного устройства и перегрузочной заслонки. Система управления перегрузкой в значительной мере освобождает водителя сельскохозяйственной уборочной машины от постоянного контроля процесса перегрузки. 21 з.п. ф-лы, 3 ил.
1. Система управления перегрузкой для управления потоком убранной массы, выходящим из перегрузочного устройства (5) сельскохозяйственной уборочной машины (2), причем перегрузочное устройство (5) на своем конце оснащено перегрузочной заслонкой (11), а убранная масса (4) передается на транспортное устройство (6), отличающаяся тем, что она охватывает определение относительного положения, управление выходным потоком убранной массы и направляющую систему для водителя, причем точка падения потока убранной массы в области транспортного средства определяется установкой перегрузочного устройства (5) и перегрузочной заслонки (11), а установка перегрузочного устройства (5) и установка перегрузочной заслонки (11) определяется в математической модели посредством векторов (А, В, С, D, Е).
2. Система по п.1, отличающаяся тем, что определение относительного положения производится между уборочной машиной (2) и по меньшей мере одним транспортным устройством (6).
3. Система по п.1, отличающаяся тем, что управление выходным потоком убранной массы охватывает скоординированное управление установкой перегрузочного устройства (5) и установкой перегрузочной заслонки (11).
4. Система по п.1, отличающаяся тем, что точка (12) падения потока (15) убранной массы на транспортное устройство (6) определяется посредством вектора (Z) точки цели.
5. Система по п.4, отличающаяся тем, что вектор (Z) точки цели составлен посредством векторного сложения вертикального вектора (А), вектора (В) перегрузочного устройства и вектора (С) потока убранной массы.
6. Система по п.4, отличающаяся тем, что вектор (Z) точки цели составлен посредством векторного сложения вектора (D) относительного положения и вектора (Е) точки погрузки.
7. Система по одному из пп.1-6, отличающаяся тем, что точка (12) падения потока убранной массы (4) на транспортное устройство (6) ведется вдоль определенной геометрии.
8. Система по п.7, отличающаяся тем, что точка (12) падения потока убранной массы (4) расположена в пределах виртуальной сетки (22).
9. Система по п.8, отличающаяся тем, что положение и/или величина виртуальной сетки (22) является изменяемой.
10. Система по п.8 или 9, отличающаяся тем, что виртуальная сетка (22) разделена на множество виртуальных участков (23).
11. Система по п.10, отличающаяся тем, что величина виртуальных участков (23) является изменяемой.
12. Система по п.11, отличающаяся тем, что виртуальная сетка (22) и виртуальные участки (23) являются управляемыми.
13. Система по п.8 или 9, отличающаяся тем, что управление точкой (12) падения потока в пределах виртуальной сетки (22) и виртуальных участков (23) производится посредством нажатия на кнопки.
14. Система по п.8 или 9, отличающаяся тем, что поворот перегрузочного устройства (5) производится в зависимости от положения и/или величины виртуальной сетки (22).
15. Система по п.10, отличающаяся тем, что область поворота перегрузочного устройства (5) определяется посредством виртуальных участков (23).
16. Система по п.7, отличающаяся тем, что точка (12) падения потока является регулируемой.
17. Система по п.5 или 6, отличающаяся тем, что вектор (Z) точки цели является переменным.
18. Система по п.7, отличающаяся тем, что точка (12) падения потока лежит на прямой или криволинейной траектории.
19. Система по п.7, отличающаяся тем, что организация перемещения точки (12) падения потока осуществляется транспортным устройством (6).
20. Система по п.8, отличающаяся тем, что направляющая система для водителя указывает положение сельскохозяйственной уборочной машины по отношению к транспортному устройству (6).
21. Система по п.7, отличающаяся тем, что поворот перегрузочного устройства (5) производится автоматически или вручную.
22. Система по п.7, отличающаяся тем, что она выполнена с возможностью принимать сигналы для определения относительного положения между уборочной машиной (2) и транспортным устройством (6) через систему GPS, а также сигналы для определения управления выходным потоком убранной массы от положения перегрузочного устройства (5) и перегрузочной заслонки (11), обрабатывать эти сигналы и предоставлять их посредством направляющей системы для водителя для индикации водителю сельскохозяйственной уборочной машины.
| Распылитель жидкости | 1984 |
|
SU1219153A1 |
| US 4529348 А, 16.07.1985 | |||
| СИЛОСОУБОРОЧНЫЙ КОМБАЙН | 0 |
|
SU188774A1 |
| Кормоуборочный агрегат | 1978 |
|
SU938807A1 |
| Выгрузной трубопровод сельскохозяйственной уборочной машины | 1990 |
|
SU1752255A1 |
| Самоходный силосоуборочный комбайн | 1973 |
|
SU503481A3 |

