Изобретение относится к технике измерений давления и может найти применение в поверочной технике.
Известен задатчик давления, описанный в одноименном а.с. СССР N 1323886 по кл. G 01 L 27/00, з. 11.05.85, оп. 15.07.87.
Известный задатчик содержит корпус с входным дросселем, соединенным с источником подачи давления, и выходным дросселем, открытым в атмосферу, образующими междроссельную камеру, снабженную контрольным преобразователем давления и гнездом для поверяемого датчика давления, причем входной и выходной дроссели выполнены в виде связанных между собой двух ступенчатых валиков, обращенных друг к другу меньшими основаниями, которые расположены в калиброванных отверстиях в стенках камеры, валики снабжены направляющими в виде поршней, закрепленных на их больших основаниях, а к одному из поршней прикреплен приводной шток, выведенный из корпуса наружу.
Недостатком известного задатчика является сложность конструкции и то, что он обеспечивает только дискретное задание давления, что обусловлено конструкцией дросселей и междроссельной камеры.
Наиболее близким по технической сущности к заявляемому является задатчик давления, описанный в статье Н.В. Архипкиной и др. “Унифицированный ряд задатчиков давления типа “Воздух” с ручным наложением грузов” в журнале “Измерительная техника” 1988 г., N1, стр. 18-19, рис. 1 и выбранный в качестве прототипа.
Известный задатчик содержит камеру с вертикальной осью симметрии, пневматически связанную с компрессором через регулятор давления, причем перпендикулярно оси камеры на ней свободно оперт нагрузочный элемент в виде плавающей пяты с регулируемым грузом.
Это, по сути, газостатическая опора и система питания к ней, которая включает регулятор давления с пневматической обратной связью по давлению для стабилизации величины узкого зазора, имеющего обычно сферический или конический профиль.
В равновесном положении, характеризуемом равенством веса нагрузочного элемента (плавающая пята с дополнительным грузом), с одной стороны, и силой упругости сжатого воздуха от регулятора давления, с другой стороны, давление воздуха в камере под плавающей пятой определяется как частное от деления веса пяты с грузом, величина которых известна, на эффективную площадь нагрузочного элемента.
Такое устройство сравнительно компактно и легко в обслуживании.
Специфика работы газостатической опоры определяет в ней совмещение нагрузочного устройства, датчика давлений и связанного с ним регулятора давлений в единое целое. Так, нарушение баланса сил, приложенных к пяте нагрузочного устройства, ведет к соответствующему изменению давлений и зазора, т.е. нагрузочный элемент и есть датчик давлений, посредством которого и осуществляется сброс избыточного давления через исполнительный элемент - зазор (регулятор давления). Очевидно, что такое совмещение имеет достоинство, заключающееся в простоте конструкции, но и имеет существенные недостатки, один из которых заключается в невозможности позиционирования нагрузочного элемента с постоянной величиной зазора и, следовательно, невозможности поддержания постоянной величины эффективной площади плавающей пяты с зазором из-за конструктивных и функциональных наложений, что обуславливает погрешность задания давления.
Следует заметить, что в устройстве-прототипе используются цепи пневматических обратных связей по давлению и (или) по расходу, осуществляющие с помощью регулятора давления стабилизацию этих характеристик, что, в свою очередь, несколько повышает точность задания давлений. Однако такое управление не может существенно повлиять на результирующую точность задания давлений, т.к. даже при постоянном интегральном уровне расхода через задатчик происходит изменение скорости обтекания пяты нагрузочного элемента при изменении его веса. Теоретически показано, что на точность задания давлений влияет именно скорость, но она изменяется за счет изменения зазора при изменении перепада давлений между камерой и окружающей средой при изменении веса нагрузочного элемента даже при постоянной величине расхода газа. Такая погрешность является здесь систематической, т.к. невозможно напрямую стабилизировать скорость истечения газа.
В общем случае силовая реакция струи на пяту зависит от скорости истечения, определяемой перепадом давлений и величиной зазора, свойств газа, шероховатости поверхности, температуры, геометрии и величины зазора и т.д. Такую реакцию истечения струи через слой на нагрузочный элемент обычно описывают введением поправочного "вязкостного" члена в выражение для эффективной площади, но достаточно точно эту составляющую поправки не возможно учесть.
Другим недостатком конструкции прототипа является то, что она не позволяет задавать давления без дискретизации его значений и не позволяет задавать малые давления, что связано с невозможностью изготовления бесконечно большого числа задающих грузов и особенностью их подвеса.
Целью изобретения является увеличение точности воспроизведения давления.
Поставленная цель достигается тем, что в газовом задатчике давления, включающем вертикальную осесимметричную камеру, нагрузочный элемент в виде соразмерной камере свободно входящей в нее пластины и размещенного поверх нее с возможностью взаимодействия регулятора нагрузки, камера пневматически связана с потребителем эталонного давления и устройством подачи газа, включающим в себя регулятор давления в контуре обратной связи задатчика давлений, и источник питания - компрессор, при этом, согласно изобретению, пластина нагрузочного элемента подвижно соединена с корпусом камеры посредством герметизатора, а регулятор давления выполнен электронным, причем вход регулятора давления связан с камерой через сенсор перемещений нагрузочного элемента, а выход регулятора давления соединен со входом камеры через компрессор, выполненный управляемым.
При этом регулятор давления может быть выполнен в виде последовательно соединенных высокочастотного управляемого генератора, преобразователя частота - напряжение и усилительно-преобразующего устройства, а сенсор перемещений может представлять собой емкость, образованную зазором между пластиной нагрузочного элемента и корпусом камеры.
При этом регулятор нагрузки может быть выполнен в виде переменного электромагнита с подвижной частью и электрически соединен с управляемым источником питания.
При этом в регуляторе давления выход преобразователя частота - напряжение может быть соединен со входом усилительно-преобразующего устройства через интегрирующее звено.
При этом в газовый задатчик давления может быть введено устройство калибровки давления, которое выполнено в виде рычага с крепежным элементом и калибровочным грузом на одном из концов рычага, причем подвижная часть регулятора нагрузки соединена с другим концом рычага калибратора.
При этом регулятор давления может содержать дополнительное пневмосопротивление для сообщения внутренней полости камеры с атмосферой, выполненное в виде размещенного в боковой стенке камеры клапана, соединенного с биморфной пластиной, подключенной ко второму выходу усилительно-преобразующего устройства регулятора давления.
При этом герметизатор из безмоментного материала с зоной провиса может быть выполнен в виде манжетной мембраны.
Подвижное соединение пластины нагрузочного элемента с корпусом камеры посредством герметизатора позволяет исключить течение газа в зазоре между ними и, следовательно, исключить влияние реакции истечения газа на эффективную площадь нагрузочного элемента.
Ошибка вычисления эффективной площади при изменении положения пластины нагрузочного элемента, а следовательно, и ошибка воспроизведения давления в предлагаемом решении сведена к минимуму за счет использования отдельно выполненных датчика перемещений и регулятора давления с целью фиксирования стационарного положения нагрузочного элемента при разных величинах воспроизводимых давлений. Наличие отдельно выполненного сенсора перемещений непосредственно определяет и задает величину зазора (а значит, и эффективной площади) с помощью регулятора давлений теоретически с любой точностью.
При этом выполнение герметизатора с зоной провиса в виде манжеты приводит к известному свойству - эффективная площадь постоянна при достаточно больших перемещениях, т.к. геометрия манжеты в допустимом достаточно большом диапазоне перемещений неизменна. Следовательно, в этом случае не требуется точно позиционировать положение нагрузочного элемента и точность воспроизведения давления обеспечивается при низких требованиях к точности регулировки положения нагрузочного элемента, то есть без усложнения схемы регулирования, существенно удешевляя конструкцию.
Кроме того, выполнение регулятора нагрузки в виде переменного электромагнита, запитываемого от управляемого источника питания, позволяет плавно регулировать нагрузку, также плавно изменяя при этом величину давления и обеспечивая задание малых давлений. Следует отметить, что обычно электромагнит обладает существенной температурной погрешностью задания силы, обладает нелинейной зависимостью перемещение - сила и, следовательно, может потребоваться возможность точного регулирования положения нагрузочного элемента, механически связанного с подвижной частью электромагнита. Поэтому предусматривается введение в электронный регулятор давления интегрирующего звена, т.е. работа устройства в астатическом режиме. Для корректировки температурной погрешности предусматривается введение в устройство механического калибратора в виде рычага с грузом.
В сравнении с прототипом, заявляемый газовый задатчик давления обладает новизной, отличаясь от него такими существенными признаками, как соединение пластины нагрузочного элемента и камеры посредством герметизатора в виде мягкой мембраны с зоной провиса, выполнение регулятора давления электронным и соединенным входом с датчиком перемещения, а выходом - с регулируемым компрессором, выход которого связан с камерой, обеспечивающими в совокупности достижение заданного эффекта. Кроме того, выполнение регулятора нагрузки в виде электромагнита, запитываемого от управляемого источника питания, обеспечивает создание переменного усилия, величина которого может быть достаточно малой, а плавность задания давления может быть ограничена лишь разрешающей способностью источника питания электромагнита.
Некоторое снижение точности задания давлений из-за недостатков, присущих электромагнитам, компенсируется введением в конструкцию калибратора и интегрирующего звена.
Заявителю не известны технические решения, обладающие указанными отличительными признаками, позволяющими в совокупности получить заданный результат, поэтому он считает, что заявляемый газовый задатчик давления соответствует критерию “изобретательский уровень”.
Заявляемый газовый задатчик давления может найти широкое применение в измерительной технике, для поверки измерителей давления, поэтому он соответствует критерию “промышленная применимость”.
Изобретение иллюстрируется чертежами, где представлены на:
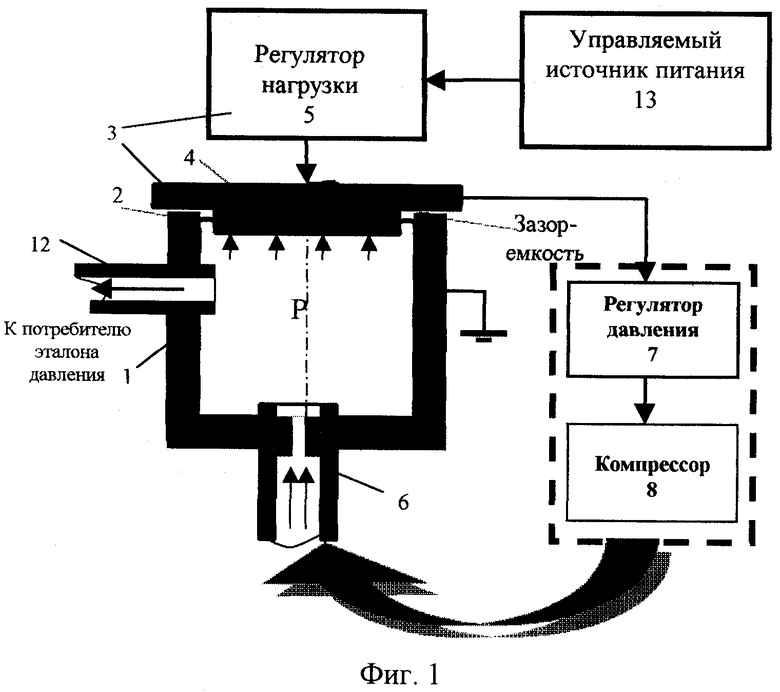
- фиг.1 - Конструктивно-функциональная схема задатчика давления с регулятором нагрузки в общем виде;
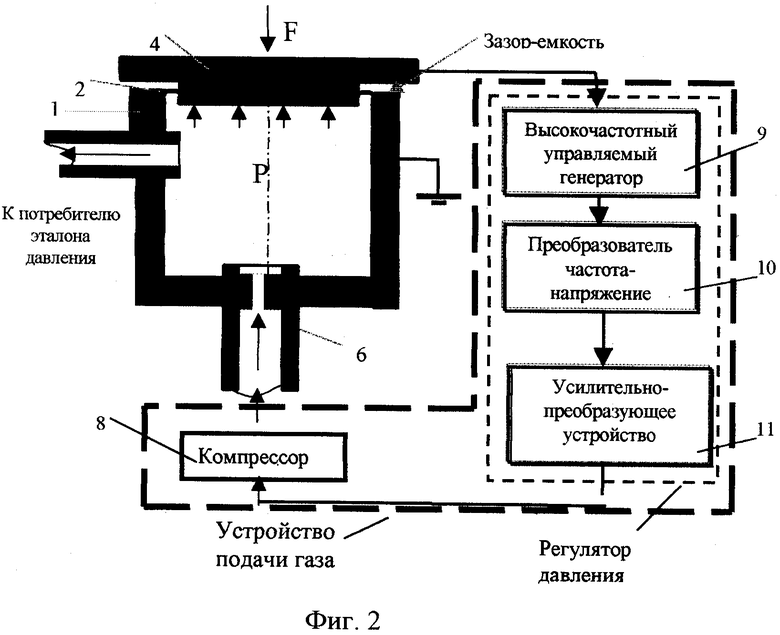
- фиг.2 - Подробная конструктивно-функциональная схема задатчика давления;
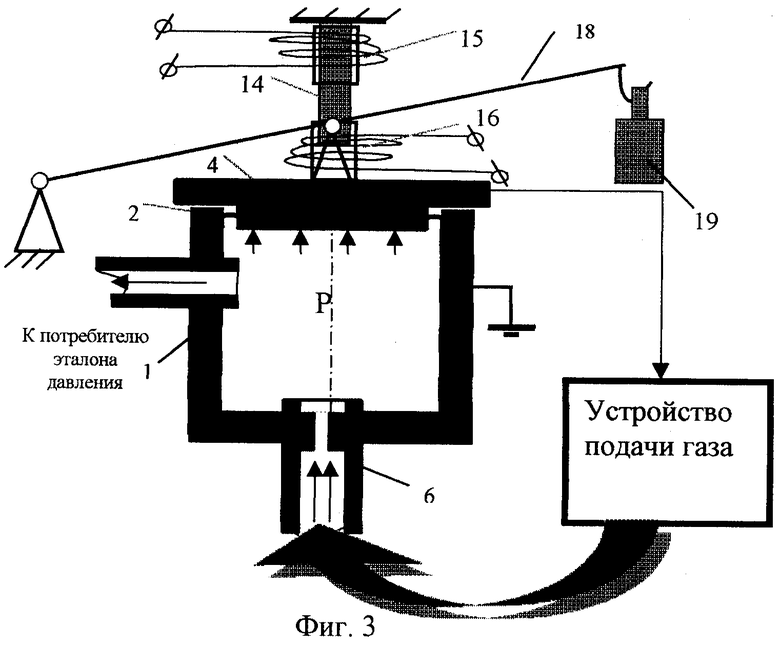
- фиг.3 - Конструктивно-функциональная схема задатчика давления с силовым механизмом в виде электромагнита с калибровочным устройством;
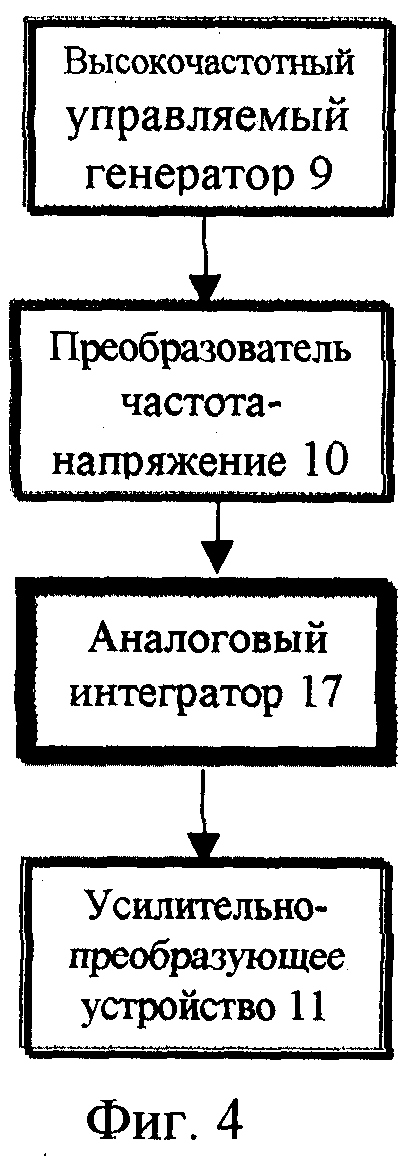
- фиг.4 - Функциональная схема регулятора давления с аналоговым интегратором;
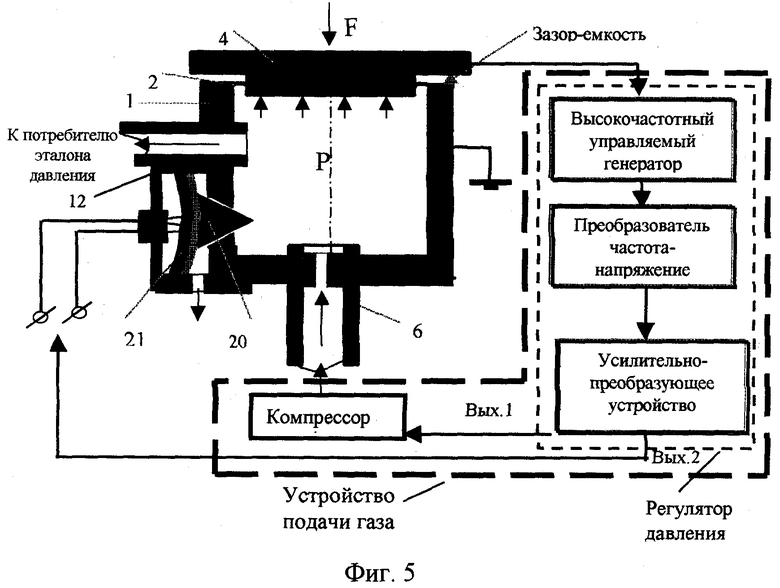
- фиг.5 - Конструктивно-функциональная схема задатчика давления с дополнительным пневмосопротивлением.
Газовый задатчик давления (фиг.1) состоит из осесимметричной камеры 1, герметизатора 2 в виде мягкой мембраны с зоной свободного провиса, нагрузочного элемента 3 в виде свободно опертой на корпус камеры 1 перпендикулярно оси ее симметрии пластины 4 и размещенного над ней регулятора 5 нагрузки.
Регулятор 5 нагрузки может представлять собой стакан с опорным пояском для наложения прецизионных грузов и центром тяжести ниже его уровня опирания, как это выполнено в устройстве-прототипе.
Датчик перемещения в общем случае может быть реализован на основе датчиков различного типа, например индуктивный датчик перемещений, однако в данном случае наиболее естественен емкостный датчик перемещений, образованный электрически изолированными соприкасающимися поверхностями заземленного корпуса камеры 1 и пластины 4 нагрузочного элемента.
Камера 1 пневматически связана через штуцер 6 с устройством подачи газа (фиг.1), включающим в себя электронный регулятор 7 давления и управляемый компрессор 8 (Возможное выполнение компрессора описано, в частности, в патенте №2121612 (РФ) "Ультразвуковой компрессор и ороситель на его основе". Опубл. в Бюл. №31, 1998).
Регулятор 7 давлений состоит из последовательно соединенных высокочастотного управляемого генератора 9 (фиг.2), преобразователя 10 "частота - напряжение", усилительно-преобразующего устройства 11. Вход генератора 9 соединен с пластиной 4, а выход компрессора 8 пневматически соединен с камерой 1 через входной штуцер 6. Камера 1 связана с потребителем эталона давления через выходной штуцер 12.
Для устранения дискретности задания нагрузки и расширения диапазона задаваемых давлений в сторону уменьшения регулятор 5 нагрузки (фиг.1) может быть выполнен в виде электромагнита, который связан с управляемым источником 13 питания и содержит закрепленный на пластине 4 (фиг.3) магнитопровод 14 и две катушки - неподвижную 15 и подвижную 16. Катушка 16 закреплена на нагрузочном элементе 3 и служит для задания силового воздействия на нагрузочный элемент при изменении тока, формируемого внешним управляемым источником питания электромагнита. Катушка 15 служит для линеаризации силовой характеристики, т.е. является катушкой подмагничивания. Принцип работы электромагнита общеизвестен и не требует описания.
Выполнение регулятора нагрузки в виде переменного электромагнита, запитываемого от управляемого источника питания, позволяет плавно регулировать нагрузку, плавно изменяя тем самым величину давления и обеспечивая задание малых давлений. Для уменьшения влияния нелинейности функции преобразования электромагнита и минимизации нелинейных искажений задаваемого им усилия предусмотрено введение в электронный регулятор давления интегрирующего звена, т.е. работа устройства в астатическом режиме. Это позволяет при разных уровнях задаваемых давлений позиционировать нагрузочный элемент практически в одном и том же положении, устраняя тем самым погрешность положения подвижной части электромагнитного нагрузочного устройства. Интегрирующее звено представляет собой аналоговый интегратор 17 (фиг.4), который включен между преобразователем частота - напряжение 10 и усилительно-преобразующим устройством 11.
Калибровочное устройство выполнено здесь в виде коромысла 18 с образцовым грузом (грузами) 19, связанными друг с другом шарнирно. Для устранения паразитного веса пластины 4, коромысла 18 и других элементов должен быть задан некоторый корректирующий ток, знак которого должен быть обратен нагрузочному и который определяет нулевое значение давления в задатчике.
Для увеличения точности позиционированиия нагрузочного элемента в конструкцию может быть введен дополнительный регулирующий элемент - пневмосопротивление (фиг.5). Оно представляет собой клапан 20 с преобразователем напряжение - перемещение в виде биморфной пластины 21. Второй выход усилительно-преобразующего устройства регулятора 7 подключен к электродам биморфной пластины 21. Пневмосопротивление 20-21 соединяет внутреннюю полость камеры 1 с атмосферой и представляет собой регулируемый пневмоклапан. Питание задатчика давлений в этом случае осуществляется от компрессора 8, подключенного к первому выходу усилительно-преобразующего устройства 11 регулятора давлений 7.
Работа устройства происходит следующим образом. В начальный момент времени воздух из компрессора 8 поступает в камеру 1 через штуцер 6 с некоторой допустимо максимальной величиной расхода, чтобы в максимально короткое время заполнить камеру 1 и другие пневмокоммуникации из камеры 1 к потребителю эталона давления. Всплытие пластины 4 нагрузочного элемента, изменение зазора, а значит, и изменение его емкости приводит к изменению частоты возбуждения высокочастотного генератора в регуляторе 7 давлений, в задающий контур которого включена данная емкость.
Далее, частотно-модулированный сигнал с высокочастотного генератора 9, управляемого емкостью зазора, поступает на преобразователь 10 частота - напряжение, который формирует сигнал управления в виде напряжения или тока и амплитуда которого пропорциональна частоте входного сигнала. Данный сигнал поступает на вход аналогового интегратора 17 и далее на усилительно-преобразующее устройство 11, где он усиливается до необходимого уровня и подается на его первый выход и далее на компрессор 8, который осуществляет дозированную подачу газа в камеру 1 через штуцер 6.
В случае использования пневмосопротивления с биморфом 21 управляющий сигнал формируется в усилительно-преобразующем устройстве 11 и снимается с его второго выхода. Биморфная пластина 21 обладает, в основном, только внутренним трением (типа вязкого трения, пропорционального скорости) и прогибается в соответствии со знаком и величиной подаваемого напряжения без наличия зоны нечувствительности характеристики напряжение-перемещение, изменяя положение пневмоклапана 14. Перемещение пневмоклапана 14 приводит к изменению зазора и, следовательно, меняется величина пневматического сопротивления, которое и управляет сбросом избыточного давления из камеры в окружающую среду, осуществляя тем самым регулирование с целью поддержания постоянного уровня зазора и предотвращая посредством регулятора давления возможное возникновение автоколебаний.
Стационарное положение нагрузочного элемента 3 характеризуется равенством силы веса F пластины 4 самого нагрузочного элемента 3 и возможной дополнительной нагрузки от регулятора 5 нагрузки силе упругости сжатого газа N, равной N=PSэф, где Р - давление в камере 1, передаваемое в качестве эталона потребителю, Sэф - эффективная площадь пластины 4 нагрузочного элемента 3 с герметизатором 2. Данное стационарное положение нагрузочного элемента 3 характеризуется некоторым зазором h0, который можно принять за базовый.
Изменение зазора приводит в конечном итоге к изменению уровня амплитуды напряжения на пневмоклапан 20-21 и изменению его пропускной способности. Одновременно меняется уровень напряжения питания на компрессор 8, который также может осуществлять регулирующее воздействие. Следует отметить, что, хотя указанный выше ультразвуковой компрессор 8 обладает достаточно высокой разрешающей способностью и быстродействием, наличие дополнительного пневмосопротивления может существенно расширить динамический диапазон регулирования.
Так как в рассматриваемом канале преобразования имеется интегрирующий элемент (аналоговый интегратор 17), то реализуется устройство с астатической характеристикой управления, что позволяет полностью устранить имеющееся рассогласование сигнала относительно некоторого его опорного значения, характеризуемого зазором h0. Это полностью устраняет ошибку управления и устанавливает неизменное значение зазора.
Регулятор 5 нагрузки действует следующим образом. При изменении тока, формируемого источником 13 (фиг.1), в подвижной катушке 16 (фиг.3) происходит пропорциональное изменение силового воздействия на пластину 4, которое уравновешивается силой давления сжатого газа Р в камере 1. Дискретность задания давлений и их минимальная величина ограничены фактически разрешающей способностью управляемого источника 13 питания.
Калибровочное устройство позволяет, в случае необходимости при наличии вредных влияющих условий, например температуры, скорректировать величину давления в камере 1 устройства. Работа калибратора очевидна и не требует объяснений.
Таким образом, предлагаемая конструкция задатчика давлений, в сравнении с прототипом, полностью исключает нестабильное реактивное действие струи, стабилизирует положение нагрузочного элемента не зависимо от величины реализуемого давления, что в совокупности повышает точность задания давлений, обеспечивает возможность плавного задания давления и расширение диапазона задаваемых давлений в сторону малых давлений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания опорного давления в объеме с рабочим веществом | 2019 |
|
RU2725028C1 |
| Система регулирования температуры теплоносителя двигателя внутреннего сгорания | 1991 |
|
SU1813893A1 |
| Пневматический преобразователь гигрометра | 1980 |
|
SU1002902A1 |
| Дифманометр | 1981 |
|
SU1213366A1 |
| Аэростатическая шпиндельная опора | 1982 |
|
SU1033786A1 |
| Устройство для автоматической накачки шины | 1985 |
|
SU1237472A1 |
| Газовый хроматограф | 1979 |
|
SU836583A1 |
| Устройство для создания опорного давления в объеме с рабочим веществом | 2019 |
|
RU2725008C1 |
| Система регулирования концентрациипОВЕРХНОСТНО-АКТиВНОгО ВЕщЕСТВА B PACT-BOPE | 1979 |
|
SU842730A1 |
| Захватное устройство | 1986 |
|
SU1423370A1 |
Газовый задатчик давления используется в измерительной технике для создания эталона давления в метрологических целях. Газовый задатчик давления состоит из осесимметричной камеры, герметизатора в виде мягкой мембраны, нагрузочного элемента в виде свободно опертой на корпус камеры перпендикулярно оси ее симметрии пластины и размещенного над ней регулятора нагрузки. Регулятор нагрузки содержит, в частности, закрепленный на корпусе магнитопровод и две катушки: неподвижную и связанную с пластиной подвижную катушку, соединенные с управляемым источником питания. Камера пневматически соединена через штуцер с устройством подачи газа, включающим в себя регулятор давления, а также компрессор. Наличие герметизатора обеспечивает подвижное соединение пластины нагрузочного элемента с корпусом камеры и дает возможность исключить течение газа в зазоре между ними и влияние реакции истечения газа на эффективную площадь нагрузочного элемента, что повышает точность задания давления. Технический результат - увеличение точности воспроизведения давления. 6 з.п. ф-лы, 5 ил.
| Стабилизатор давления газа | 1986 |
|
SU1324015A1 |
| Задатчик давления | 1985 |
|
SU1323886A1 |
| US 5925835 А, 20.07.1999 | |||
| US 5597008 А, 28.01.1997 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| СПОСОБ ПРОИЗВОДСТВА СТЕРИЛИЗУЕМЫХ КОНСЕРВОВ | 2004 |
|
RU2264335C1 |
| ИНСТРУМЕНТ для НАКАТКИ ЗВЕЗДОЧЕК ЦЕПНЫХПЕРЕДАЧ | 0 |
|
SU331838A1 |
| Пульсатор для градуировки датчиков давления | 1983 |
|
SU1138675A1 |
| Устройство для динамической градуировки датчиков давления | 1983 |
|
SU1081450A1 |
| DE 19715917 А1, 22.10.1998 | |||
| RU 20444291 С1, 20.09.1995 | |||
| ДВУХКАНАЛЬНЫЙ ЗАДАТЧИК ДАВЛЕНИЯ | 1990 |
|
RU2015529C1 |
| Устройство для задания и автоматической стабилизации давления | 1988 |
|
SU1621005A1 |
| Устройство для регулирования давления | 1984 |
|
SU1180853A1 |

