1
Изобретение относится к устройст- ам, захватьшающим картонные, пластмассовые и т.п. ящики для укладки последних на поддоны или перекладки, ахватное устройство может найти при- ,енение во всех отраслях, где исполь- уются картонные, пластмассовые и Другие ящики с продукцией.
Целью изoб.pefeния является повьшге- надежности работы путем переноса 1 ескольких ящиков одновременно без i|x смятия.
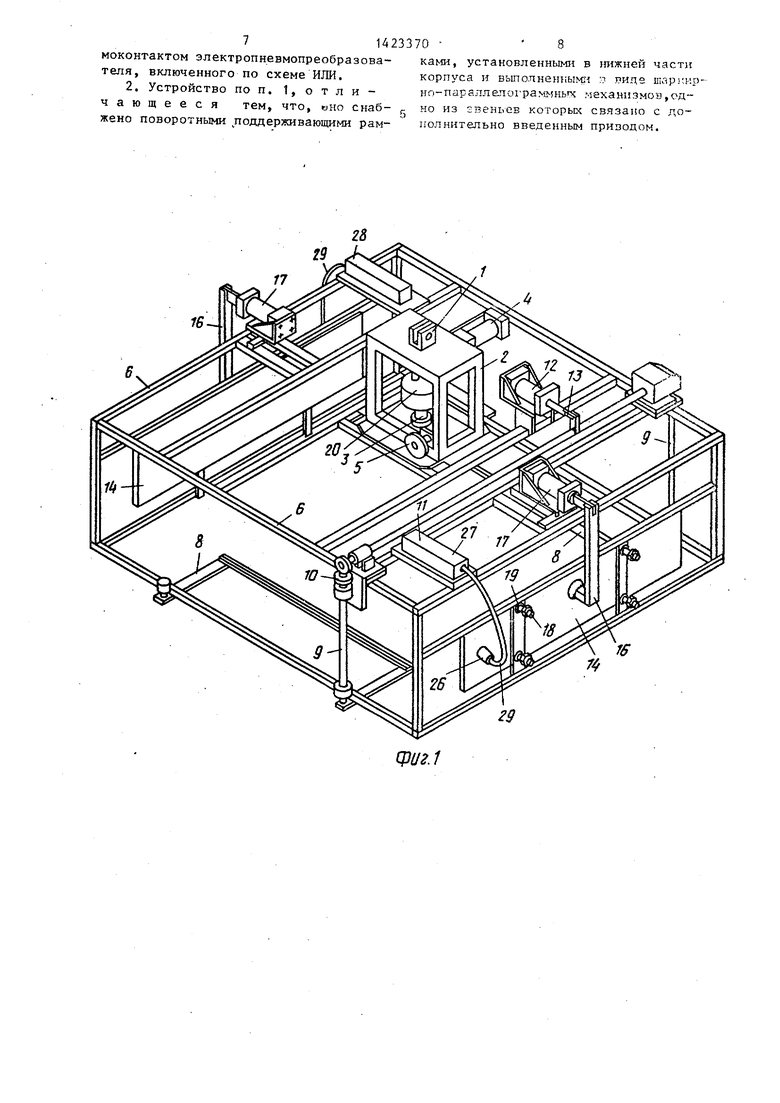
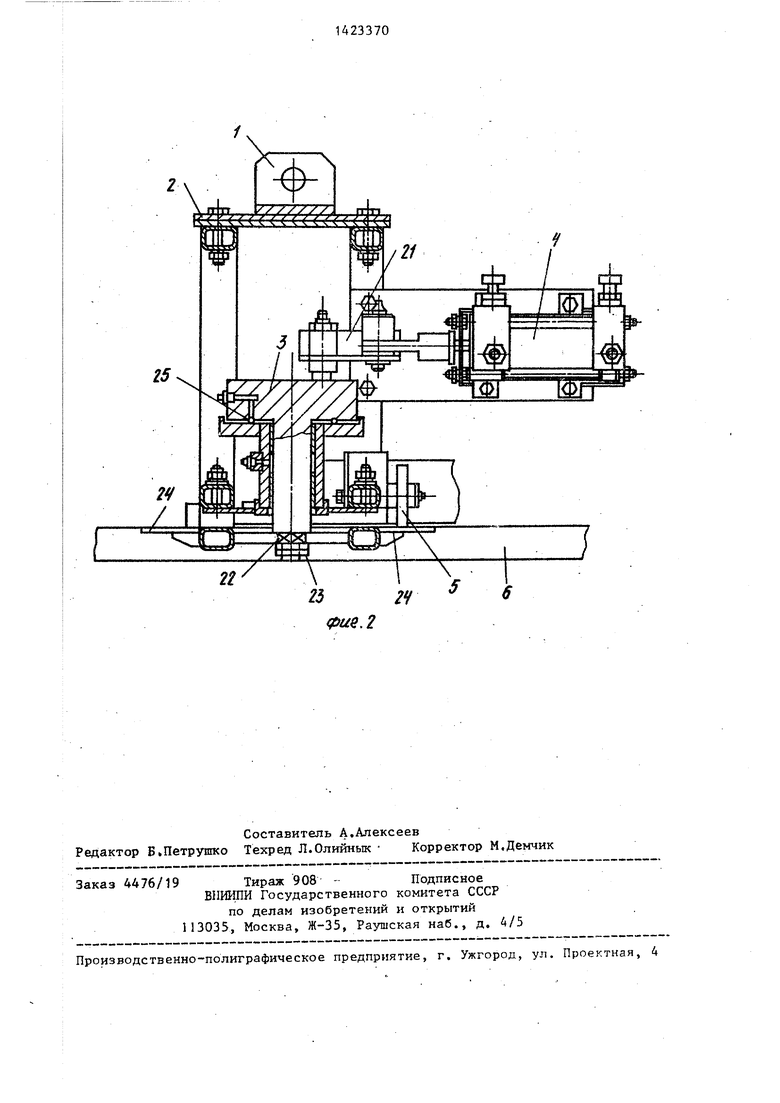
I На фиг, 1 представлено захватное устройствоJ общий вид, на фиг. 2 - то же, разрез по оси поворота с коприводом на фиг. 3 - схема систе- управления.
Захватное устройство содержит серь г|у 1, за которую прикрепляют к руке 1 анипулятора неподвижную раму 2, ось 3, пневмоцилиндр 4, опорные ролики 5, поворотный корпус 6 с упорными
фланками 7,
Корпус 6 имеет также две поворот- поддерживающие рамки 8, сочлененную неподвижно с осями 9, конически- к(и шестернями 10 и общим горизонталь- и|ым валом 11. Вал 11 соединен с пйев- Цоцилиндром 12 посредством серьги 113. Две зажимных губки-пластины 14 соединены с помощью шаровых опор 15 с р|ычагами 16 и пневмоцилиндром 17.Плас т|ины 14 установлены на четырех осях 18, введенных во втулки 19, Ось 3
в|ерхним концом 20 соединена с пневмо- 1 |илиндром 4 посредством серьги 21, а н(ижним концом неподвижно соединена с п1оворотной рамой с помощью квадрата
г
55
0
5
0
5
22 и зафиксирована гайками 23. Ролики 5 закре:гшены в раме 2 и опираются на планки 24, приваренные к раме. Ось 3 опирается на шарикоподшипник 25.
Система управления включает в себя сопло 26, установленное в пластинах 14, блоки 27, 28 регулирования с элементами пневмоавтоматики. Связь между соплами и блоками осуществляется гибким пневмокабелем 29. Каждый блок содержит элементы: аналоговый пневмоповторитель - усилитель 30 давления, точный элемент 31 сравнения, задатчик 32 ручной установки задания, пневмоповторитель-усилитель 33 мощности, регулируемые пневмосопротивле- ния 34-36, элетстропневмопреобразова- тель 37. Блок 28 содержит также элект- ропневмопреобразователи 38, 39. Кроме того блоки 27, 28 имеют пневмо- .электропреобразователи 40..
Работа устройства происходит следующим образом.
Исходное положение Открыто поворотных поддерживающих рамок 8 и пластин 14 создается путем подачи соответствующих внешних команд на пневмо- цилиндр ы 12, 17. Для управления пнев- моцилиндрами 4, 12 необходимы свои электропневмопреобразователи.
Пневмоидаиндр 4 служит для поворота устройства вокруг оси на-угол 90 ,
Пневмои шиндр 12 служит для вьщви- жения и убирания поворотных поддерживающих рамок 8. При подаче давления воздуха в пневмоцилиндр 12, например под шток, шток втягивается, серьга
13 поворачивает вал 11, вместе с ко- нической шестерней 10 поворачивается ось 9 на 90°, За счет шарниров в соединениях рамки 8 она складывается в горизонтальной плоскости и занимает нижнее положение под планкой рамы. Такое положение рамки 8 соответствует команде Открыто.
Схема собрана на элементах УСЭППА. Отметим также, что электропневмопре- образователи системы УСЭППА являются дискретными элементами автоматики и выполняют свою обычную функцию - подачу воздуха по командам от электрической части схемы управления. Одна- ко этот элемент имеет конструктивную особенность: между двумя соплами размещена мембрана с жестким центром с притертой заслонкой. Образующиеся от мембраны камеры соединены между собой, переходными отверстиями. Кроме- того, имеется возвратная пружина, которая поджимает мембрану к верхневыходное давление в пределах О,Г 0,2 кгс/см, . На задатчиках 32 блоков 27 и 28 устанавливают давления соответственно 0,4 и 0,8 кгс/см, Общие точки питания обеспечиваются стабштт,- Hbw давлением не менее 1,2 кгс/см .
Для исполнения команды Захват следует снять питание с трех элемен10 тов 37-39. Тогда элементы 31 и 33
блоков 27, 28 первоначально отрабатывают соответственно сигналы О, 1 кгс/см в блоке 27 к 0,8 кгс/см в блоке 28. При этом поршни пневмоцилиндров 17,
15 перемещая свои штоки, сближают плас-- тины 14. Через некоторое время стенки ящиков, контактируя со струями воздуха, выходящего из сопл 26, повышают давление во вход1 ых камерах анапп о20 вых пневмоповторителей-усилитепей, ко торые повьшают выходное давлеш е с коэффициентом усиления К|, 10. Тогда на выходе элемента 31 блока 27 оста-- ется величина задания 0,4 кгс/см
му сполу, образуя так называемый нор- 25 а на выходе элемента 31 блока 2.8 по- мально замкнутый пневмоконтакт. При лучим давление 1,2 кгс/см.
Так как в элементах 37-39 верхнее сопло является нормально замкнутым пневматическим контактом, то по отно- 30
J подаче напряжения в катушку,электромагнита заслонка перебра сывается в нижнее положение, и откр шается выход в атмосферу через верхнее сопло. Для управления пневмоприводами 17 на электропневмопреобразователй 37-39 одновременно подается питание. Тогда их нормально замкнутые пневмоконтак- ты перебрасьшаются на нижнее сопло. При этом элемент 38 разряжает в атмосферу элемент 33 блока 28 и давление падает до нуля в заштоковых полостях пневмоцилиндра 17, От лемен- та 31 блока 28 сигнал проходит на элемент 39, который затем поступает в элемент 37 блоха 27 и далее в элемент 33 блока 27. При этом пневмоци- линдры 17 начинают открывать пластины 14 независимо от наличия ящиков 41.
Для правильной работы устройства определяют ми нимальную силу сжатия группы гофрокоробов и.с учетом площади зажимных губок-пластин 14 устанавливают силу сжатия как разность давления на задатчиках 32 блоков 27, 28. Первоначально схему настраивают при положении Открыто следующим образом. Устанавливают давление в. расходных соплах 26 0,1 кгс/см с помощью пневмосопротивлений 34. На выходе элементов 30 с помощью пневмосопротивлений 35 также устанавливают
35
40
45
50
55
шению к сигналу элемента 31 блока 28 элемент 39 закрыт, а элемент 38 открыт, и сигнал поступает в управляющую камеру элемента 33 блока 28. На вход в пневмоцилнндры 17 подается давление 1,2 кгс/см. Аналогично для блока 27, где элемент 37 открыт, сигнал поступает в управлякщую камеру элемента 33 блока 27, который подает сигнал равный 0,4 кгс/см. В итоге на штоках поршней развивается усилие прямо пропорциональное разности давле ний на задатчиках 32 ручной установ ки заданий на блоках 27, 28, т.е. результирующее давление равно 1,2- 0,4 0,8 кгс/см.
Возможны три случая управления усилием сжатия.
1. При подаче напряжения питания только на элемент 37 получим максимальное усилие сжатия, что применимо для пластмассовых и других прочных ящиков, В данном случае в элементе 37 перекрьшается нижнее сопло, и давление воздуха от элемента 31 блока 27 не поступает в усилитель мощности - элемент 33 блока 27..Верхнее сопло элемента 37 блока 27 соединяется с пepeпycкнымli отверстиями, и воздух от элемента 31 блока 27 через верхнее
выходное давление в пределах О,Г 0,2 кгс/см, . На задатчиках 32 блоков 27 и 28 устанавливают давления соответственно 0,4 и 0,8 кгс/см, Общие точки питания обеспечиваются стабштт,- Hbw давлением не менее 1,2 кгс/см .
Для исполнения команды Захват следует снять питание с трех элемен0 тов 37-39. Тогда элементы 31 и 33
блоков 27, 28 первоначально отрабатывают соответственно сигналы О, 1 кгс/см в блоке 27 к 0,8 кгс/см в блоке 28. При этом поршни пневмоцилиндров 17,
5 перемещая свои штоки, сближают плас-- тины 14. Через некоторое время стенки ящиков, контактируя со струями воздуха, выходящего из сопл 26, повышают давление во вход1 ых камерах анапп о0 вых пневмоповторителей-усилитепей, которые повьшают выходное давлеш е с коэффициентом усиления К|, 10. Тогда на выходе элемента 31 блока 27 оста-- ется величина задания 0,4 кгс/см
Так как в элементах 37-39 верхнее сопло является нормально замкнутым пневматическим контактом, то по отно- 0
5
0
5
0
5
шению к сигналу элемента 31 блока 28 элемент 39 закрыт, а элемент 38 открыт, и сигнал поступает в управляющую камеру элемента 33 блока 28. На вход в пневмоцилнндры 17 подается давление 1,2 кгс/см. Аналогично для блока 27, где элемент 37 открыт, сигнал поступает в управлякщую камеру элемента 33 блока 27, который подает сигнал равный 0,4 кгс/см. В итоге на штоках поршней развивается усилие прямо пропорциональное разности давлений на задатчиках 32 ручной установ ки заданий на блоках 27, 28, т.е. результирующее давление равно 1,2- 0,4 0,8 кгс/см.
Возможны три случая управления усилием сжатия.
1. При подаче напряжения питания только на элемент 37 получим максимальное усилие сжатия, что применимо для пластмассовых и других прочных ящиков, В данном случае в элементе 37 перекрьшается нижнее сопло, и давление воздуха от элемента 31 блока 27 не поступает в усилитель мощности - элемент 33 блока 27..Верхнее сопло элемента 37 блока 27 соединяется с пepeпycкнымli отверстиями, и воздух от элемента 31 блока 27 через верхнее
5U
ёопло поступает в элемент 39.Так как 1 элементе 39 блока 28 питание напря не подано, то нижнее сопло от- рыто за счет пружины и соединено с Атмосферой, Таким образом, во всей 1|1агистрали и цилиндрах 17 со стороны ipTOKOB давление воздуха равно нулю.
С другой стороны, от блока 28 эле 1ент 31 вьщает сигнал давлением ,2 атм (при пневмоконтакте сопл 26 офрокоробами). Так как элемент 38 :ри отсутствии питания током находит ;я в нормально-замкнутом состоянии нижнее сопло открыто), то воздух по упает в усилитель 33 мощности блока 28, который повторяет и подает мощ- toe давление воздуха под поршни ци- индров 17, В результате усилие на Лтоке максимально и пропорционально давлению, равному 1,2 кгс/см.
2.При Подаче напряжения питания олько на элементы 37 и 39 усилие
йжатия минимально, что применимо для пакетов из крафтбумаги и полиэтилена После элемента 37 блока 27 давление иоздуха не поступает от элемента 31 (шока 27 в усилитель 33 мощности бло- са 27. При контаете сопла 26 блока 118 с коробом давление, равное
,2 кгс/см J от элемента 31 блока 28 JiocTynaeT через элементы 39, затем 7 и одновременно через элемент 38 цилиндры с одним и тем жв давлением 1,2 кгс/см с двух сторон одно- ременно. Таким образом, результирую- ее усилие сжатия пропорционально разности площадей сечения поршня с Йвух сторон, т.е. равно площади што- i/aa и давлению. При штоке диаметром 1б мм усилив на штоке составляет около 2,5 кг. С учетом площади пластин 14 усилие сжатия гданимально или рав- Йо нулю.
3.При подаче напряжения питания голько на элемент 38 (что возможно, йсобенно при программируемом управлении, например, после исполнения ко- Мвнды - максимальной силы, т.е после включения элементов 37 и 39) усшше Сжатия начинает уменьшаться, и пластины 14 частично раздвигаются до выравнивания давления до 0,4 кгс/см в Это происходит потому, что по отношению к сигналу от элемента 31 блока 28 элемент 38 закрыт (нижнее сопло закрыто), элемент 39 также закрыт (как нормально замкнутый контакт) .
В данном случае блок 28 выключен из
706
управления цилиндрами 17. Однако блок 27 подключен к управлению-пневмоди- линдрами 17. Через элемент 37 (ниж- нее сопло открыто) воздух давлением 0,1 кгс/см поступает в элемент 33 блока 27, который подает давление , 0,4 кгс/см в цилиндры со стороны штоков. В результате поршни в цилиндpax раздвигаются настолько, насколько преодолено сопротивление трущихся пар в цепочке передвижения пластин 14,
ДпЯ( расширения .технологических . возможностей в устройстве имеется
устройство поворота группы транспортируемых гофрокоробов на 90°. Эта операция вьшолняется с помощью под- - чи управляющих сигналов в пневмоци- линдр, 4. При этом шток пневмоцилиндра
4, взаимодействуя с серьгой 21, поворачивает ось 3. Последняя, за счет,-- неподвижности сочленения с поворот- ным корпусом (рамой) 6, осуществляет ее разворот на 90°.
Формула изобретен и.я
1. Захватное устройство включающее корпус, на котором установлены зажим- Hbie губки с датчиками контроля усилия зажима, выполненными в виде струйных сопл, связанных через систему управления с приводом перемещения
зажимных губок, отличающее6С Я тем, что, с целью повьш1ения надежности работы, система управления включает аналоговые пневмоповторите- ли, включенные по схеме усилителя давления, входные камеры которых соединены со струйными соплами, их выходы совместно с элементами предварительной настройки давления связаны с элементами сравнения, при этом выходы последних соединены через электропневмопреобразователи с пневмоповто- рителями, связанными с приводами перемещения зажимньгх губок, кроме того, электропневмопреобразователь, соединенный с элементом сравнения меньшего сигнала,- включен по. схеме ИЛИ, а выход элемента сравнения большего сигнала подсоединен к двум электро- пневмопреобразователям, первый из которых подключен к нормально разомкнутому второй - к нормально замкнутому пневмоконтактам, причем второй электропневмопреобразователь своим нормально разомкнуть пневмоконтактом соединен с нормально разомкнутым пневмоконтактом электропневмопреобразова- теля, включенного по схеме ИЛИ.
2. Устройство по п. 1, отличающееся тем, что, юно снабжено поворотными поддерживающими рамками, установленными в гшжнеи части корпуса и вьшолненны - : риде шар};ир- но-парйлл ло1 раммньгх механизмов,одно из звеньев которых связано с дополнительно введенным приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления двигателем | 1974 |
|
SU631670A1 |
| Пневматическое устройство для управления процессом дозирования | 1985 |
|
SU1270753A2 |
| ГЕНЕРАТОР ИМПУЛЬСОВ | 1992 |
|
RU2032840C1 |
| Пневматическое устройство для централизованного контроля и управления | 1974 |
|
SU594485A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1969 |
|
SU241103A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Устройство для дозирования жидких химикатов | 1980 |
|
SU954960A2 |
| ПНЕВМАТИЧЕСКИЙ ДОЗАТОР С ОТМЕРИВАНИЕМ ДОЗЫ ПО УРОВНЮ ЖИДКОСТИ В ТАРЕ | 2020 |
|
RU2754139C1 |
| Погрузочный манипулятор | 1984 |
|
SU1216148A1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДОЗИРОВАНИЯ ЖИДКОСТЕЙ НА БАЗЕ МЕМБРАННОГО НАСОСА | 2016 |
|
RU2628984C1 |
Изобретение относится к устройствам, зaxвaтывaюпJ им картонные, пластмассовые и т.п. ящики для уютад- ки на поддоны или перекладки. Целью изобретения является повышение надежности работы. При захвате изделия питание снимается с элементов 37, 38 и 39. Тогда элементы 31 и 33 блоков 27 и 28 первоначально отрабатьгоают сигналы предварительной установки. При этом зажимные губки-пластины 14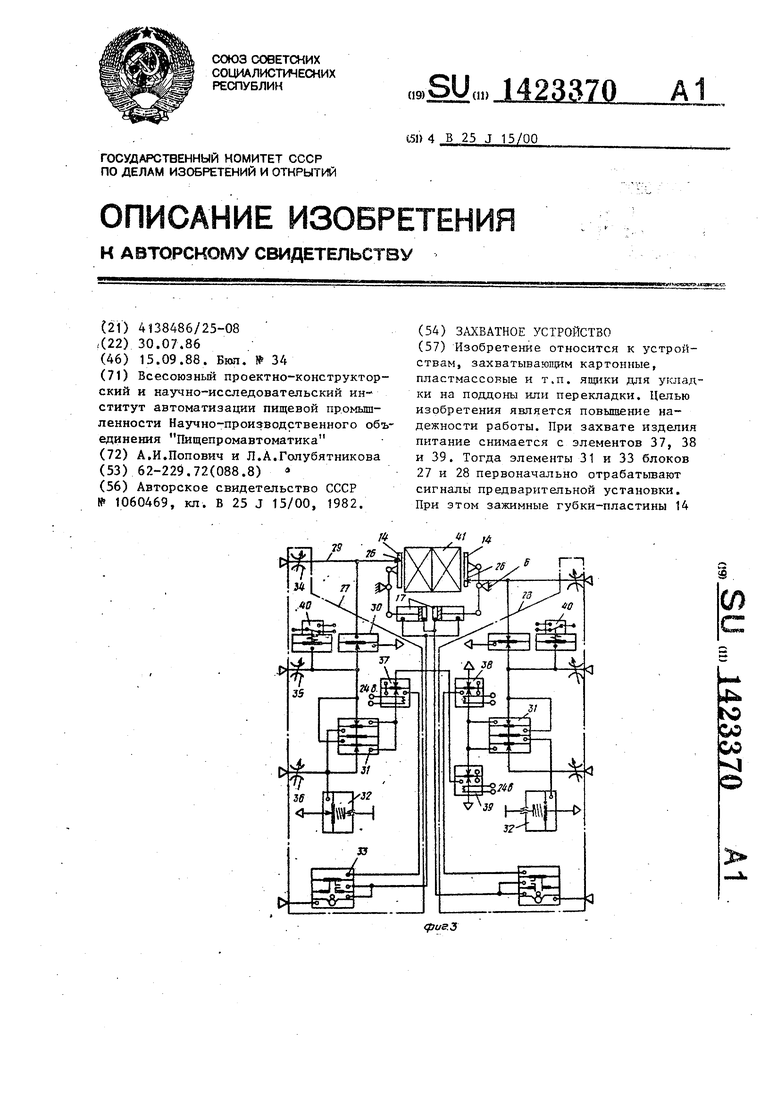
IS
/
29
(риг.1
| Схват | 1982 |
|
SU1060469A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
