Изобретение относится к общему машиностроению и может быть использовано в транспортном машиностроении, преимущественно в автомобилестроении, а также в станкостроении.
Известна автоматическая бесступенчатая механическая передача, содержащая ведущее и ведомое центральные конические зубчатые колеса, находящиеся в зацеплении соответственно с внутренними и внешними относительно линии оси передачи колесами основных сателлитов, размещенных на радиальных осях водила. Дополнительные сателлиты, размещенные аналогично основным сателлитам, введены в зацепление с закрепленным в корпусе передачи центральным коническим зубчатым опорным колесом. Все сателлиты выполнены с массивными ободами (см. патент РФ 2178108, МПК F 16 Н 33/14, 3/74, 10.10.2002, Бюл. № 1).
В связи с неподвижностью опорного колеса эта передача имеет узкий диапазон регулирования величины передаваемого вращающего момента и недостаточно высокий КПД.
Наиболее близким по совокупности признаков техническим решением к заявленному изобретению является автоматическая бесступенчатая инерционная передача, содержащая корпус, соосные ведущий и ведомый валы, водило с радиальными осями, размещенные на них с возможностью независимого друг от друга вращения сблокированные по два основные сателлиты и дополнительные сателлиты, размещенные по одну сторону от радиальных осей водила ведущее и ведомое центральные конические зубчатые колеса, установленное соосно линии оси передачи центральное коническое зубчатое опорное колесо, которое введено в зацепление с дополнительными сателлитами и связано с ведущим валом посредством привода опорного колеса, состоящего из зубчатых ведущего и ведомого колес привода, первое из которых установлено на ведущем валу, а второе - на размещенном коаксиально с ведущим валом полом валу опорного колеса, ведущее и ведомое колеса привода введены порознь в зацепление с соответствующими зубчатыми промежуточными колесами, установленными на валу промежуточных колес, размещенном с возможностью вращения в корпусе передачи параллельно ведущему валу, все колеса привода опорного колеса выполнены цилиндрическими (см. патент РФ 2163316, МПК 7 F 16 Н 33/14, 3/74, 20.02.2001, Бюл. № 5).
Недостатком этой автоматической бесступенчатой инерционной передачи является наличие в ее составе полого вала опорного колеса, размещенного коаксиально с ведущим валом и несущего закрепленные на нем два зубчатых колеса, что усложняет устройство передачи, увеличивает ее массу и размеры в осевом направлении. Выполнение ведущего и ведомого колес и основных сателлитов в виде конических колес, также приводит к усложнению устройства в связи с большей трудоемкостью и сложностью изготовления конических зубчатых колес по сравнению с цилиндрическими зубчатыми колесами.
Предлагаемое изобретение обеспечивает достижение технического результата, который заключается в упрощении устройства, уменьшении размеров и массы передачи, уменьшении действующих в передаче сил трения в связи с меньшим числом входящих в ее состав зубчатых колес.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит соосные ведущий и ведомый валы, имеющие возможность вращения только в одном направлении, на которых установлены соответственно ведущее и ведомое центральные зубчатые колеса, введенные порознь в зацепление с соединенными друг с другом основными сателлитами, размещенными на водило, которое выполнено с радиальными осями и размещено с возможностью вращения вокруг линии оси передачи, на радиальных осях водила по разные стороны от линии оси передачи размещены конические дополнительные сателлиты, введенные в зацепление с коническим) центральным опорным колесом, связанным с приводом опорного колеса, состоящего из закрепленного на ведущем валу зубчатого ведущего колеса упомянутого привода, введенного в зацепление с первым из двух зубчатых промежуточных колес, которые закреплены на одном валу, размещенном параллельно ведущему валу с возможностью вращения в корпусе передачи. Все колеса привода опорного колеса выполнены цилиндрическими. Опорное колесо и водило имеют возможность вращения только в противоположных направлениях относительно друг друга. Опорное зубчатое колесо выполнено двухвенцовым, один зубчатый венец которого выполнен коническим, а другой - цилиндрическим.
Согласно изобретению конический венец опорного колеса введен в зацепление с дополнительными сателлитами, а цилиндрический венец опорного колеса введен в зацепление со вторым промежуточным колесом привода опорного колеса, при этом опорное колесо размещено непосредственно на ведущем валу с возможностью вращения относительно этого вала. Ведущее колесо, ведомое колесо и колеса основных сателлитов выполнены цилиндрическими, при этом основной сателлит, введенный в зацепление с ведущим колесом, является ведущим, а основной сателлит, введенный в зацепление с ведомым колесом, является ведомым и колеса упомянутых ведущего и ведомого основных сателлитов соединены валом сателлитов, который размещен с возможностью свободного в вращения на водило параллельно линии оси передачи. Ведущее и ведомое колеса размещены по разные стороны от водила. Дополнительные сателлиты выполнены с массивными ободами с обеспечением возможности при вращении увеличения их моментов количества движения. Между ведущим и ведомым колесами размещен механизм свободного хода, ведущее звено которого связано с ведомым валом, а ведомое звено - с ведущим валом.
Линия оси радиальных осей водила и линия оси передачи пересекаются в центральной точке, совмещенной с этими осями.
Водило размещено с возможностью свободного вращения на ведомом или ведущем валу.
Как частный случай выполнения, на водиле размещена с одной стороны от линии оси передачи только одна пара основных сателлитов, а с противоположной стороны от линии оси передачи на водиле размещен уравновешивающий массу упомянутых основных сателлитов груз, с возможностью использования с этой целью более массивного дополнительного сателлита по сравнению с дополнительным сателлитом, размещенным вместе с основными сателлитами на упомянутой одной стороне водила.
Как частный случай выполнения, на водиле размещены с противоположных сторон от линии оси передачи одинаковые пары основных сателлитов.
На чертеже дано в общем виде изображение автоматической бесступенчатой механической передачи с показом всех ее элементов и отличительных признаков, характеризующих изобретение.
Автоматическая бесступенчатая механическая передача содержит соосные ведущий 1 и ведомый 2 валы, имеющие возможность вращения только в одном направлении, на которых закреплены соответственно ведущее 3 и ведомое 4 центральные зубчатые колеса, введенные порознь в зацепление с соединенными друг с другом основными сателлитами 5, 6, размещенными на водило 7, которое выполнено с радиальными осями и размещено с возможностью вращения вокруг линии оси О-О передачи. На радиальных осях водила 7 по разные стороны от линии оси О-О передачи размещены конические зубчатые дополнительные сателлиты 8, введенные в зацепление с коническим центральным опорным колесом 9, связанным с приводом опорного колеса, состоящего из закрепленного на ведущем валу 1 зубчатого ведущего колеса 10 упомянутого привода, введенного в зацепление с первым 11 из двух зубчатых промежуточных колес, которые закреплены на одном валу 12, размещенном с возможностью вращения в корпусе 13 передачи параллельно ведущему валу 1. Все колеса привода опорного колеса выполнены с цилиндрическими зубчатыми венцами. Опорное колесо 9 и водило 7 имеют возможность вращения в противоположных направлениях относительно друг друга. Опорное зубчатое колесо 9 выполнено двухвенцовым, один зубчатый венец которого выполнен коническим 14, а другой - цилиндрическим 15. Конический венец опорного колеса введен в зацепление с дополнительными сателлитами, а цилиндрический венец 15 опорного колеса введен в зацепление со вторым промежуточным колесом 16 привода опорного колеса. Опорное колесо размещено непосредственно на ведущем валу 1 с возможностью вращения относительно этого вала. Ведущее колесо 3, ведомое колесо 4 и колеса 5, 6 основных сателлитов выполнены цилиндрическими. Основной сателлит 5, введенный в зацепление с ведущим колесом 3, является ведущим, а основной сателлит 6, введенный в зацепление с ведомым колесом 4, является ведомым, и колеса упомянутых ведущего и ведомого основных сателлитоы соединены валом 17 сателлитов, который размещен параллельно линии оси О-О передачи с возможностью свободного вращения на водиле 7. Ведущее 3 и ведомое 4 колеса размещены по разные стороны от водила 7. Дополнительные сателлиты выполнены с массивными ободами с обеспечением возможности при вращении увеличения их моментов количества движения. Между ведущим 3 и ведомым 4 колесами размещен механизм свободного хода 18, ведущее звено которого связано с ведомым валом, а ведомое звено - с ведущим валом 1.
Линия оси О1-О1 радиальных осей водила 7 и линия оси О-О передачи пересекаются в центральной точке О1, совмещенной с этими осями.
Водило 7 размещено с возможностью свободного вращения на ведомой 2 или ведущем 1 валу.
Как частный случай выполнения, на водиле 7 размещены с противоположных сторон от линии оси О-О передачи одинаковые пары основных сателлитов 5, 6.
Как частный случай выполнения, на водиле 7 размещена с одной стороны от линии оси О-О передачи только одна пара основных сателлитов 5, 6, а с противоположной стороны от линии оси О-О передачи на водиле размещен уравновешивающий массу упомянутых основных сателлитов груз, с возможностью использования с этой целью более массивного дополнительного сателлита по сравнению с дополнительным сателлитом, размещенным вместе с основными сателлитами 5, 6 на упомянутой одной стороне водила 7.
Автоматическая бесступенчатая механическая передача работает следующим образом.
При вращении ведущего вала 1 с ведущим колесом 3 на неподвижном ведомом вале 2 в связи с приложенной к нему нагрузкой или началом вращения из неподвижного положения, ведущий основной сателлит 5 вращается под воздействием находящегося с ним в зацеплении ведущего колеса 3 и вовлекает во вращение с той же угловой скоростью связанный с ним валом 17 ведомый основной сателлит 6, который перекатывается по неподвижному ведомому колесу 4 и приводит водило 7 с его радиальными осями во вращение вокруг линии оси О-О передачи. Одновременно опорное колесо 9 под воздействием привода опорного колеса 10, 11, 12, 16 совершает вращение вокруг линии оси О-О передачи в противоположном направлении по сравнению с водилом. При этом дополнительные сателлиты 8, находящиеся в зацеплении с опорным колесом 9, совершают вращение вокруг линии оси О1-О1 радиальных осей водила 7 и одновременно вместе с водилом вращаются вокруг линии оси О-О передачи. Одновременное вращение дополнительных сателлитов 8 вокруг пересекающихся линий осей - линии оси О-О передачи и линии оси О1-О1 радиальных осей водила 7 равнозначно вращению их относительно центральной точки О1 пересечения упомянутых линий осей. Вращение опорного колеса 9 и водила 7 вокруг линии оси О-О передачи в противоположных направлениях обеспечивают высокую частоту вращения дополнительных сателлитов 8 относительно центральной точки О1, что определяет высокую эффективность работы передачи.
Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением всеобщего закона сохранения, согласно которому момент количества движения может быть изменен только под воздействием моментов внешних сил. Известно также, что момент количества движения при вращении тела относительно точки является векторной величиной. При вращении водила 7 векторы моментов количества движения дополнительных сателлитов 8 изменяют свое направление. Проявление при этом закона сохранения противодействует вращению водила 7 с его радиальными осями вокруг линии оси О-О передачи, которое стремится сохранить свое стабильное положение. В связи с этим водило с его радиальными осями играет роль опоры для передачи вращения и вращающего момента при помощи основных сателлитов 5, 6 от центрального ведущего колеса 3 на ведомое колесо 4. При этом внешней опорой для торможения вращения водила 7 и обеспечения передачи и преобразования вращающего момента является корпус 13 передачи, в котором установлен вал 12 промежуточных колес, связанный через посредство второго промежуточного колеса 16 с опорным колесом 9, обеспечивающим вращение дополнительных сателлитов 8 вокруг линии оси О1-О1 радиальных осей водила 7 и в конечном итоге относительно центральной точки О1. Величина тормозящего момента на водило 7 зависит от массы дополнительных сателлитов 8 и частоты их вращения одновременно вокруг линии оси О-О передачи и линии оси О1-О1 радиальных осей водила 7, т.е. от частоты вращения относительно центральной точки О1 пересечения этих линий осей. Опорное колесо 9 находится в постоянном вращении и обеспечивает передачу вращающего момента и возможность его трансформирования в связи с наличием внешней опоры на корпус 13 передачи. При этом обеспечивается возможность передачи вращения при любом режиме работы передачи.
Максимальный по величине вращающий момент передается на неподвижный ведомый вал 2, поскольку при этом водило 7 вовлекается во вращение с максимальной частотой в направлении, противоположном направлению вращения опорного колеса 9. При этом дополнительные сателлиты 8 имеют максимальную частоту вращения относительно центральной точки О1, что обеспечивает создание наибольшего по величине момента количества движения и наиболее интенсивное изменение направления векторов момента количества движения относительно центральной точки О1. Известно, что действия над векторами являются отражением соответствующих действий над векторными величинами (см., например, "Политехнический словарь" под редакцией академика А.Ю.Ишлинского. М., Советская энциклопедия, - 1980, стр. 73/1).
С началом вращения ведомого вала 2 частота вращения водила 7 относительно центральной точки О1 уменьшается, что приводит к соответствующему уменьшению величины моментов количества движения дополнительных сателлитов и интенсивности изменения направлений их векторов, а следовательно, к уменьшению величины вращающего момента, передаваемого на ведомый вал 2.
При максимальной частоте вращения ведомого вала 2 водило неподвижно. Однако при этом дополнительные сателлиты вращаются вокруг линии оси О1-О1 радиальных осей водила 7, поскольку эти сателлиты находятся в зацеплении с постоянно вращающимся опорным колесом 9. Передача вращающего момента на ведомый вал при этом происходит за счет устойчивости радиальных осей водила 7, несущих вращающиеся дополнительные сателлиты 8.
Помимо указанных выше условий величина передаваемого вращающего момента зависит также от величины передаточных отношений всех находящихся в зацеплении пар колес.
При необходимости передачи вращающего момента и вращения от ведомого вала 2 на ведущий вал 1 с целью торможения рабочей машины, работа двигателя прекращается. При этом под воздействием вращающего момента со стороны вращающегося ведомого вала 2 происходит замыкание механизма свободного хода 18, который обеспечивает передачу потока мощности от вращающегося ведомого вала на ведущий вал и далее на двигатель, который оказывает сопротивление вращению его вала при неработающем режиме. Этим же обеспечивается пуск двигателя при буксировке рабочей машины.
Постоянное зацепление применяемых зубчатых колес уменьшает их износ, повышает надежность в работе и долговечность предложенной автоматической бесступенчатой механической передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277655C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277656C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2277654C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247885C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247274C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ИНЕРЦИОННАЯ ПЕРЕДАЧА | 2000 |
|
RU2163316C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2163317C2 |
Изобретение относится к машиностроению. Автоматическая бесступенчатая механическая передача содержит соосные ведущий 1 и ведомый 2 валы, цилиндрические ведущее 3 и ведомое 4 центральные колеса, цилиндрические основные сателлиты 5, 6, дополнительные сателлиты 8, выполненные с массивными ободами и размещенные на радиальных осях водила 7, коническое опорное колесо 9, связанное с приводом опорного колеса, и механизм свободного хода. Привод опорного колеса содержит ведущее колесо 10 и зацепленное с ним промежуточное колесо 11, установленное на одном валу 12 вместе со вторым промежуточным колесом 16. Вал 12 промежуточных колес размещен с возможностью вращения в корпусе 13 передачи параллельно ведущему валу. Опорное колесо 9 имеет два зубчатых венца - конический 14 и цилиндрический 15, зацепленные соответственно с дополнительными сателлитами 8 и с промежуточным колесом 16. Ведущее и ведомое колеса размещены по разные стороны от водила. Технический результат - упрощение устройства и уменьшение массы передачи с обеспечением высокого КПД и автоматического и бесступенчатого изменения в широких пределах величины передаваемого вращающего момента в зависимости от приложенной к ведомому валу нагрузки. 3 з.п. ф-лы, 1 ил.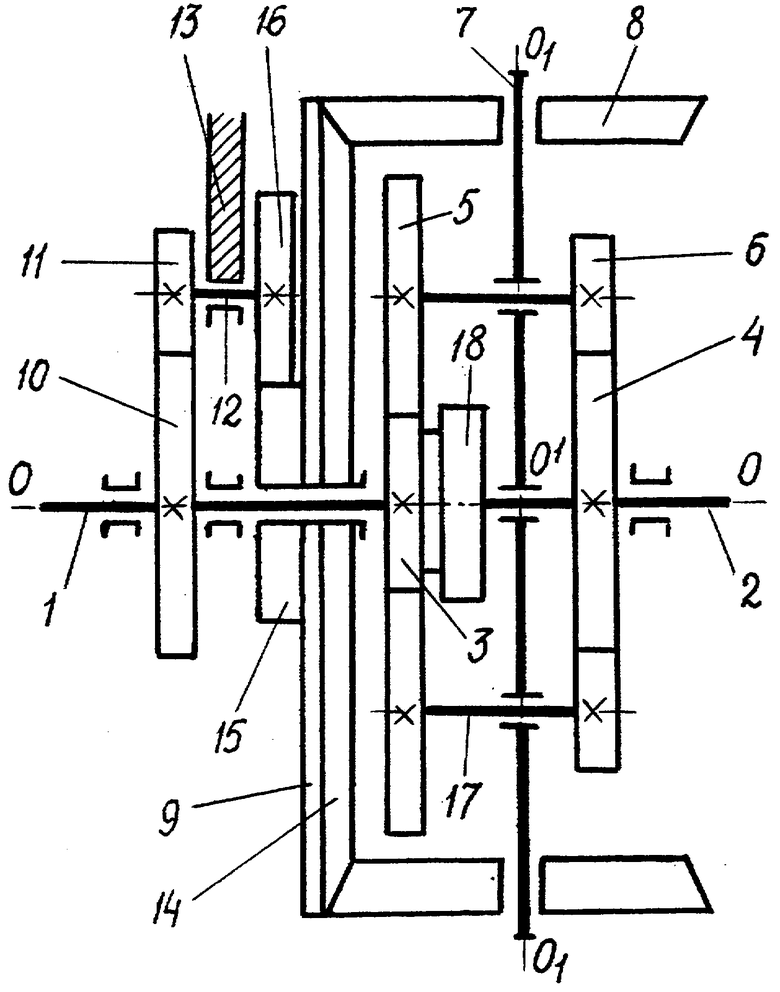
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ИНЕРЦИОННАЯ ПЕРЕДАЧА | 2000 |
|
RU2163316C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174202C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171928C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2178108C2 |

