Изобретение относится к медицинской технике, в частности к устройствам измерения распределения веса тела человека по опорным поверхностям (зонам) стоп, рук, седалища для проведения диагностики (исследования) расстройств опорно-двигательного аппарата, снижением мышечного тонуса, нарушением вертикальной устойчивости и т.д.
Известны весы переносные напольные, содержащие горизонтальные рычаги, тягу, зубчатую рейку, соединенную с трибком с поворотным индикатором, отличающиеся тем, что они снабжены кронштейном с ограничителем, жестко соединенным с тягой, и стержнем с пружиной на одном конце, зубчатая рейка выполнена П-образной, расположена внутри кронштейна и соединена с кронштейном с одной стороны пружиной, с другой - ограничителем. [А.с. СССР №528455, кл. G 01 G 19/14, опубликовано 15.09.76, бюл. №34].
Недостатком данного устройства является малая точность определения опорной поверхности человека и распределения веса по этим опорным поверхностям.
Прототипом настоящего изобретения является известное взвешивающее устройство для измерения распределения веса тела человека по основным опорным зонам стопы, содержащее грузоподъемный узел с датчиками веса, отличающееся тем, что с целью измерения распределения веса по опорным точкам взвешиваемого тела блок обработки информации выполнен в виде усилителей, подключенных к информационным входам мультиплексора, соединенного через узел выборки - запоминания и АЦП с входом микро-ЭВМ, выход которой связан с управляющим входом мультиплексора, а датчики веса расположены в точках опоры взвешиваемого тела и подключены к соответствующим усилителям. [А.с. СССР №1744506 А1, МКИ5 G 01 G 19/44, опубл. 30.06.92, бюл. №24].
Данное устройство позволяет приблизительно определить распределение веса по приближенно определенным поверхностям человека, так как точность определения опорных поверхностей в данном устройстве зависит от числа датчиков, установленных на устройстве.
Основным недостатком устройства является невозможность правильного диагностирования плоскостопия обследуемого.
Задачей настоящего изобретения является определение поверхности касания опорной поверхности стоп на предмет диагностики плоскостопия, касающихся ровной плоскости, и положения центра тяжести взвешиваемого человека относительно опорных поверхностей на предмет диагностики опорно-двигательного аппарата.
Поставленная задача решается тем, что грузоподъемный узел с датчиками веса, подключенными к блоку обработки информации, отличающийся тем, что датчики веса снабжены пружинными опорами с емкостными датчиками перемещения, включенными в обратную связь генераторов переменной частоты. Выходы генераторов переменной частоты через триггеры соединены с входами регистров с последовательным входом, управляемые калиброванными по времени стробирующими импульсами. Выходы регистров соединены с входами мультиплексора, устанавливающего последовательность опроса, выход мультиплексора присоединен к входу цифровой измерительно-вычислительной системы, производящей вычисление положения центра тяжести.
Сущность изобретения поясняется фиг.1, 2, 3, 4, 5.
На фиг.1 и 2 приведены общие виды устройств для взвешивания и определения распределения веса тела человека по опорным зонам (поверхностям).
На фиг.3 приведена принципиальная схема датчиков веса с емкостным датчиком перемещения в виде двух телескопических цилиндров, входящих один в другой.
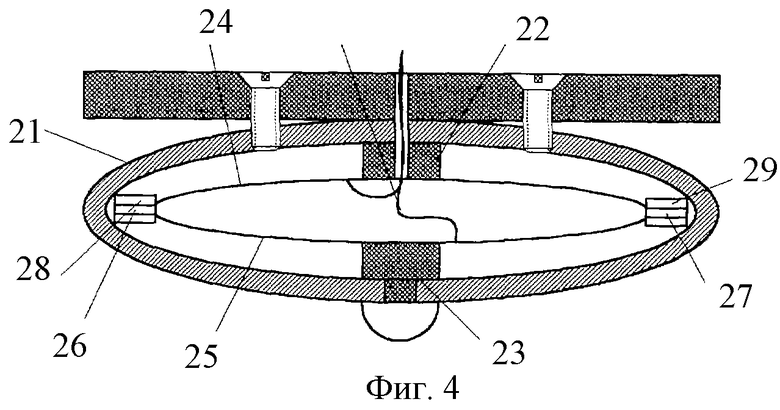
На фиг.4 приведен датчик веса с емкостным датчиком в виде двух изогнутых, изолированных пластин, соединенных вогнутыми сторонами.
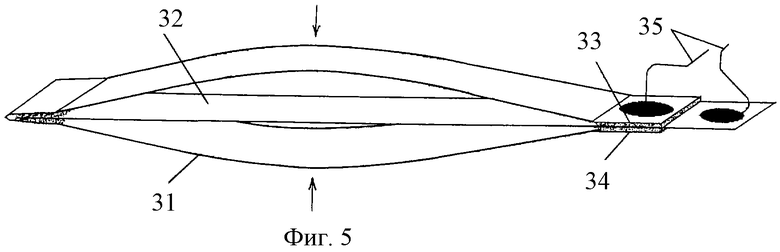
На фиг.5 приведен емкостной датчик перемещения, выполненный из одной изогнутой пластины, согнутой вдвое, и одной плоской пластины.
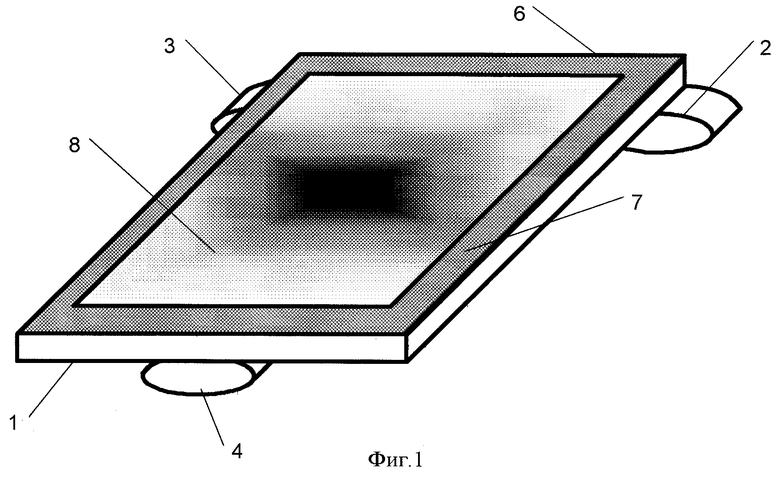
Устройство для взвешивания и определения распределения веса тела человека по опорным зонам (поверхностям) состоит из (фиг.1, 2) грузоприемной платформы 1 с тремя весовыми опорами 2, 3, 4, устанавливаемыми на пол. Верхняя поверхность грузоподъемной платформы снабжена датчиком опорной поверхности тела человека (например, ступней) 5. На фиг.1 этот датчик выполнен в виде бумажного листа 6 с координатной сеткой 7, который покрывается листом копировальной бумаги 8.
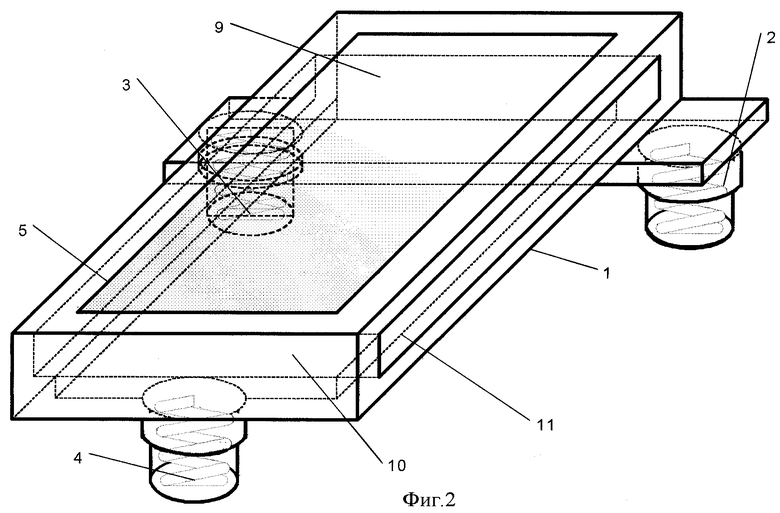
На фиг.2 датчик опорной поверхности тела человека 5 выполнен в виде толстой стеклянной плиты 9, установленной в жесткой раме в виде параллелепипеда, внутрь которого вставляется цветной текстовый сканер 10, который прижимается к стеклянной плите поролоновой подушкой 11.
На фиг.3 приведен датчик веса с емкостным датчиком перемещения в виде двух телескопических цилиндров, входящих один в другой. Он содержит цилиндрический корпус 12 и 3 диэлектрика и прикреплен к грузоподъемной платформе 13. В его центре расположен диэлектрический шток 14 с поршнем 15, ход которого ограничивается крышкой 16. На шток надета калиброванная пружина 17. В цилиндрическую часть корпуса 12 жестко установлен неподвижный цилиндрический электрод датчика 18, а на поршень 15 надет подвижный цилиндрический электрод 19. Электроды соединены с генератором переменной частоты проводами 20.
На фиг.4 приведен датчик веса в виде упругого эллипса 21, на короткой оси которого установлены диэлектрические втулки, соединенные с пластинами емкостного датчика перемещения 24, 25. Концы пластин разделены диэлектрическими прокладками 26, 27 и скреплены втулками 28, 29. Электроды соединяются с генератором переменной частоты проводами 30.
На фиг.5 приведен емкостной датчик перемещения в виде вогнутой пластины, сложенной вдвое, и одной плоской пластины 32, расположенной между двумя изогнутыми 31. В месте скрепления пластины разделены диэлектрическими прокладками 33, 34 и соединены винтом 35, который не касается средней пластины 32. Соединение пластин емкости с генератором осуществляется проводами 36.
Каждый датчик веса выполнен в виде прикрепленного торцом к нижней стороне грузоподъемной платформы цилиндра, внутри которого расположен регулировочный винт с осевым отверстием для штока, контактирующего нижним концом с датчиком перемещения, а на верхнем конце штока закреплен поршень, между нижним торцом которого и регулировочным установлена калибровочная пружина.
Емкостной датчик перемещения выполнен в виде двух телескопических цилиндров, входящих один в другой и изолированных электрически.
Емкостной датчик перемещения выполнен в виде двух изогнутых, изолированных пластин, соединенных вогнутыми сторонами.
Емкостной датчик перемещения выполнен в виде одной прямой промежуточной пластины и двух изогнутых пластин, соединенных вместе.
Датчик положения опорных поверхностей тела на грузоприемном узле выполнен в виде гладкой горизонтальной поверхности с фиксаторами положения бумаги, на которую укладывается лист координатной бумаги, а затем лист копировальной бумаги (пачкающим слоем вниз).
Датчик положения опорных поверхностей тела человека выполнен в виде рамы из толстого стекла, под которую ставится текстовый цветной сканер.
Работает устройство следующим образом. На грузоподъемную площадку устройства (фиг.1) накладывается бумага с координатной сеткой, поверх которой накладывается копировальная бумага 7. На верх копировальной бумаги становится пациент. В местах контакта стопы с грузоподъемной площадкой копировальная бумага прижимается к координатной бумаге и оставляет след. Вес тела пациента распределяется между датчиками веса, которые прогибаются пропорционально нагрузке. На фиг.3 приведена принципиальная схема датчика веса с емкостным датчиком перемещения в виде двух телескопических цилиндров, входящих один в другой. При прогибе спиральной калибровочной пружины 17 на фиг.3 поршень 15 с подвижным цилиндрическим электродом 13 смещается вверх относительно неподвижного цилиндрического электрода 18. В результате емкость обратной связи генератора увеличивается, и частота генератора уменьшается. Возможна другая установка цилиндров, когда при сжатии пружины подвижный цилиндр будет выходить из неподвижного, и частота колебаний генератора будет увеличиваться. Триггеры преобразуют нелинейные колебания генераторов в прямоугольные колебания и передают их на регистры с последовательными входами, которые управляются калиброванными по времени импульсами, и записывают пропорциональное частоте поступающего сигнала число импульсов, которое считывается с их выходов по окончании импульса, и устанавливаются нули. Мультиплексор поочередно считывает получаемую информацию и вводит в цифровое вычислительное устройство, где производится вычисление центра тяжести по показаниям датчиков, и его координаты выводятся на дисплей или монитор. Полученные координаты оператор наносит на координационную бумагу пациента. Таким образом, мы получаем документ в виде отпечатка стоп с указанием координат центра тяжести и веса.
Для автоматического получения документа применяется устройство, приведенное на фиг.2, снабженное датчиком положения опорных поверхностей тела человека в виде цветного текстового сканера, располагаемого под прочной стеклянной грузоподъемной площадкой. При нагружении грузоподъемной площадки 9 исследуемым человеком опоры 2, 3, 4 прогибаются и расстояние между диэлектрическими втулками 22 и 23 уменьшается. Электроды емкостного датчика 24 и 25 сближаются. В результате изменяется частота генератора. Возможно применение емкостного датчика перемещения в виде вогнутой пластины, сложенной вдвое, 31 и одной плоской пластины. Такой датчик обладает большей емкостью благодаря удвоенной перемещающейся поверхности. Работает такое устройство в сочетании с ПК, на мониторе которого мы получаем цветное изображение стоп обследуемого человека с координатами центра тяжести и веса обследуемого. Обработка данных осуществляется как и в первом случае, но данные выводятся на мониторе на изображении стоп пациента, полученного на сканере. Кроме того, данное устройство позволяет определить распределение веса и на других опорных поверхностях человеческого тела, например кисти рук и седалища.
Внедрение изобретения расширяет диагностические и исследовательские возможности медицинской техники, ускоряет обследование пациентов, дает возможность реализовать базу данных и автоматически выделять группу лиц с отклонениями. Весьма полезным будет применение предлагаемого устройства при первичных осмотрах, например при проф. осмотре или военных комиссиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ РЕЗУЛЬТАТОВ РЕАБИЛИТАЦИОННЫХ МЕРОПРИЯТИЙ У БОЛЬНЫХ С ПОСЛЕДСТВИЯМИ ГЕМОРРАГИЧЕСКОГО ИНСУЛЬТА ИЛИ АМПУТАЦИОННЫМИ КУЛЬТЯМИ НИЖНИХ КОНЕЧНОСТЕЙ ПОСЛЕ ПРОТЕЗИРОВАНИЯ | 2013 |
|
RU2547611C1 |
| ОРТОПЕДИЧЕСКИЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1999 |
|
RU2180517C2 |
| СПОСОБ ФОРМИРОВАНИЯ УСТОЙЧИВОСТИ В ПОЗЕ СИДЯ У ПАЦИЕНТОВ СО СТАТОДИНАМИЧЕСКИМИ НАРУШЕНИЯМИ | 2010 |
|
RU2448670C1 |
| СПОСОБ ФОРМИРОВАНИЯ УСТОЙЧИВОСТИ ВЕРТИКАЛЬНОЙ ПОЗЫ У ПАЦИЕНТОВ СО СТАТОДИНАМИЧЕСКИМИ НАРУШЕНИЯМИ | 2010 |
|
RU2448645C1 |
| Устройство для диагностики заболеваний бронхолегочной системы | 2016 |
|
RU2631629C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЧЕЛОВЕКА | 2000 |
|
RU2195171C2 |
| Способ и устройство для диагностики и коррекции опорной дисфункции | 2018 |
|
RU2705232C1 |
| Весоизмерительное устройство | 1987 |
|
SU1532819A1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРА ПАРАМЕТРОВ ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1993 |
|
RU2039538C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |

Изобретение относится к медицинской технике, в частности к устройствам измерения распределения веса тела человека по опорным поверхностям (зонам) стоп, рук, седалища для проведения диагностики (исследования) расстройств опорно-двигательного аппарата, снижением мышечного тонуса, нарушением вертикальной устойчивости и т.д. Грузовая платформа снабжена датчиком опорной поверхности пациента и опирается как минимум на три взвешиваемых устройства, выходы которых соединены с устройством вычисления полного веса и положения центра тяжести на грузовой платформе с изображением опорных поверхностей. Данные об опорных поверхностях выводятся на экран монитора с координатной сеткой грузовой платформы с координатами центра тяжести пациента. Технический результат - устройство расширяет диагностические и исследовательские возможности медицинской техники, ускоряет обследование пациентов, дает возможность реализовать базу данных и автоматически выделять группу лиц с отклонениями. 3 з.п. ф-лы, 5 ил.
| Взвешивающее устройство | 1990 |
|
SU1744506A1 |
| Весы переносные напольные | 1975 |
|
SU528455A1 |
| Устройство для исследования статических функций человека | 1977 |
|
SU904663A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ прогнозирования риска развития синдрома диабетической стопы у жителей Центральной России с сахарным диабетом 2 типа на основе генотипирования полиморфизма rs7517862 гена ATF6 | 2023 |
|
RU2811753C1 |

