/ I Ч
I f
t Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Узел встройки тензодатчика и ударопрочные весы на его основе | 2018 |
|
RU2699036C1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 2011 |
|
RU2483283C2 |
| Устройство для дозирования металла | 1982 |
|
SU1244501A2 |
| УДАРОПРОЧНЫЕ ВЕСЫ И УДАРОПРОЧНЫЙ УЗЕЛ ВСТРОЙКИ ТЕНЗОДАТЧИКА | 2009 |
|
RU2411465C2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ | 1991 |
|
RU2026535C1 |
| Весовое устройство для взвешивания животных в движении | 1988 |
|
SU1616559A1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2222787C1 |
| Устройство для измерения массы | 1983 |
|
SU1137323A1 |
| Весоизмерительное устройство | 1990 |
|
SU1755057A1 |
| Весоизмерительное устройство | 1981 |
|
SU1044997A1 |
Изобретение относится к весоизмерительной технике, в частности к платформенным весам, и позволяет повысить точность за счет защиты датчика силы от перегрузок. При нагружении грузоприемной платформы 5 сила веса передается через соединительные кронштейны 4 и четыре рессоры 2 упругого параллелограмма на датчик силы 1. Для устранения перегрузки и динамических нагрузок установлены регулировочные винты 8 и пружина 10. Различные модификации рессор способствуют увеличению жесткости упругого параллелограмма и улучшению его демпфирующей способности. 4 ил., 4 з.п.ф-лы.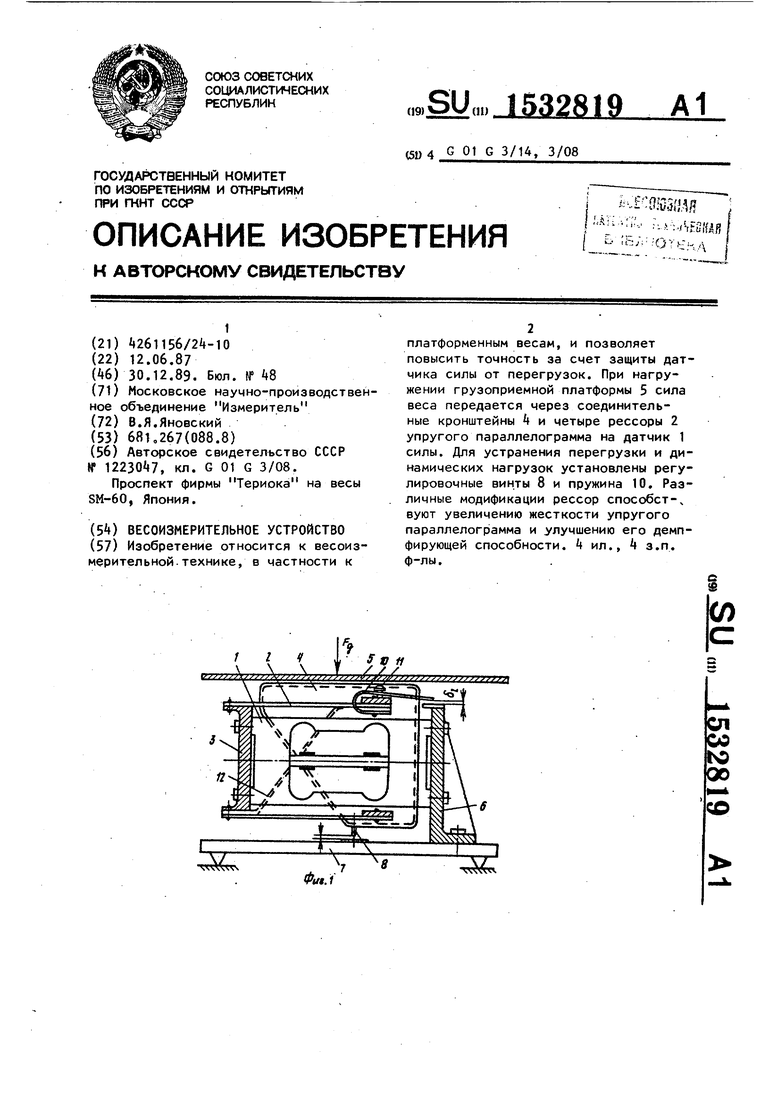
Pui.i
AVvwA
31532819
относится к весоизмеримибо вы но си ст
тельной технике, преимущественно для взвешивания грузов на платформенных весах.
Целью изобретения является повышение точности за счет защиты датчика силы от перегрузок.
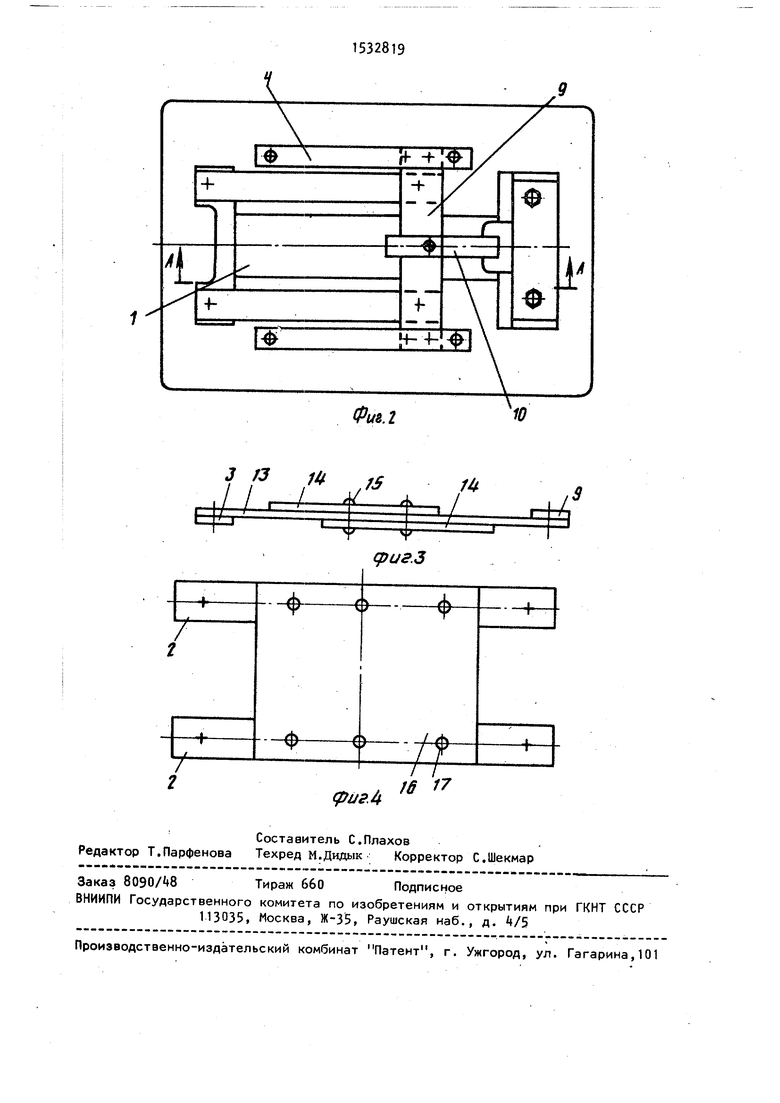
На фиг. 1 показано предлагаемое весоизмерительное устройство, общий ю вид (сечение А-А на фиг.. 2); на фиг. 2 - то же, без грузоприемной платформы, вид сверху; на фиг. 3 - рессора с дополнительными плоскими пружинами; на фиг. k - рессоры, соеди-15 ненные между собой посредством прямо™ угольной пластины, вид сверху.
Весоизмерительное устройство состоит из датчика 1 силы, упругого параллелограмма в виде пространственного 20 механизма, образованного четырьмя параллельно расположенными рессорами 2, концы которых с одной стороны через ч стойку 3 связаны с подвижной частью датчика 1 силы, а с другой стороны 25 через соединительный кронштейн 4 - с грузоприемной платформой 5. | Неподвижной стороной датчик 1 силы закреплен посредством угольника 6 на
ми 17. Соединение рессор 2 между собой может быть-также осуществлено выполнением их совместно с пластиной 1б из одной заготовки. Датчик 1 силы расположен симметрично в пространстве между рессорами 2.
Датчик 1 силы веса, используемый в весоизмерительном устройстве, должен быть нечувствительным к воздейст вию изгибающих моментов, возникающих при смещении груза на грузоприемной платформе, например тензорезисторный датчик силы с упругим телом в виде па раллелограмма. В устройстве могут при меняться и датчики с другими преобра зователями, общеизвестными в силоиз- мерительной технике, например емкостными, индуктивными, вибростержне выми.
Весоизмерительное устройство рабо тает следующим образом.
При постепенном нагружении грузоприемной платформы 5 рессоры 2 про странственного параллелограмма, упру го деформируясь, передают усилие на подвижную (измерительную) сторону датчика 1. При этом зазоры $( и ог при номинальной нагрузке уменьшаются
основании 7 весоизмерительного устроило соответственно на 80 и 90. При стает ва. На боковых частях соединительного кронштейна b расположены ограничители в виде регулировочных винтов 8 с зазором Ј относительно основания 7. На планке 9 соединительного кронштейна 4 консольно закреплена пластина 10 мягкого упора. Пластина 10 изогнута регулировочным винтом 11 и образует
35
зазор
8„
относительно опорной площадн.
ки на угольнике 6. Пружина 10 мягкого упора является дополнительным ог- граничителем.
Между боковыми парами верхних и нижних рессор 2 установлены гасители
12колебаний, одними концами они закреплены на стойке 3 а другими концами имеют возможность с трением перемещаться по рессорам 2.
Рессора 2 (фиг. 3) имеет исполнение в виде основной плоской пружины
13и двух дополнительных плоских пружин И, которые консольно, с взаимным перекрытием, симметрично закреплены заклепками 15 на средней части противоположных поверхностей основной плос40
45
50
55
тической перегрузке на 10-20% вначале вступает в действие пластина 10 мягкого упора с зазором $г, а затем при дальнейшей перегрузке - упор ные винты 8 с зазором 8 .
Благодаря сравнительно большому перемещению грузоприемной платформы, обусловленному наличием между нею и датчиком промежуточного упругого параллелограмма, обеспечивается надежная работа ограничительных упоров, имеющих достаточные зазоры
5, и §г.
При падении номинального значения взвешиваемой массы с некоторой высот возникает импулье ударной нагрузки, который может превышать допустимую статическую нагрузку, при этом может функционировать только мягкий упор исключая резкие ударные реакции со стороны жестких упорных винтов 8 и же значительно смягчая их. Энергия ударного импульса частично гасится за счет взаимодействия с массой груз подъемной платформы 5 с присоединенными к ней подвижными частями упругог параллелограмма, которая имеет с дат чиком 1 силы нежесткую связь, а такж за счет трения гасителей 12 колебани
кой пружины 13.
Пары рессор 2 (фиг. 4) могуг быть соединены между собой прямоугольной пластиной 16, закрепленной заклепками 17. Соединение рессор 2 между собой может быть-также осуществлено выполнением их совместно с пластиной 1б из одной заготовки. Датчик 1 силы расположен симметрично в пространстве между рессорами 2.
Датчик 1 силы веса, используемый в весоизмерительном устройстве, должен быть нечувствительным к воздействию изгибающих моментов, возникающих при смещении груза на грузоприемной платформе, например тензорезисторный датчик силы с упругим телом в виде параллелограмма. В устройстве могут применяться и датчики с другими преобразователями, общеизвестными в силоиз- мерительной технике, например емкостными, индуктивными, вибростержневыми.
Весоизмерительное устройство работает следующим образом.
При постепенном нагружении грузоприемной платформы 5 рессоры 2 про странственного параллелограмма, упруго деформируясь, передают усилие на подвижную (измерительную) сторону датчика 1. При этом зазоры $( и ог при номинальной нагрузке уменьшаются
соответственно на 80 и 90. При ста5
0
5
0
5
тической перегрузке на 10-20% вначале вступает в действие пластина 10 мягкого упора с зазором $г, а затем при дальнейшей перегрузке - упорные винты 8 с зазором 8 .
Благодаря сравнительно большому перемещению грузоприемной платформы, обусловленному наличием между нею и датчиком промежуточного упругого параллелограмма, обеспечивается надежная работа ограничительных упоров, имеющих достаточные зазоры
5, и §г.
При падении номинального значения взвешиваемой массы с некоторой высоты возникает импулье ударной нагрузки, который может превышать допустимую статическую нагрузку, при этом может функционировать только мягкий упор, исключая резкие ударные реакции со стороны жестких упорных винтов 8 или же значительно смягчая их. Энергия ударного импульса частично гасится за счет взаимодействия с массой грузоподъемной платформы 5 с присоединенными к ней подвижными частями упругого параллелограмма, которая имеет с датчиком 1 силы нежесткую связь, а также за счет трения гасителей 12 колебаний.
Оставшаяся импульсная энергия интегрируется за время деформации рессор 2 и передается на датчик силы с соответствующим снижением амплитуды и фронта ударной нагрузки.
Параллелограмм пространственной конструкции, у которого параллельные рессоры разнесены по ширине, имеет
момент сопротивления кручению больший,ю содержащее грузоприемную платформу,
чем параллелограмм плоской конструкции с одинаковой общей шириной рессор в результате этого поперечная устойчивость грузоприемной платформы увеличивается.
С этой же целью каждая рессора может выполняться в виде основной плоской пружины и двух дополнительных плоских пружин, которые консольно с взаимным перекрытием закреплены на средней части противоположных поверхностей основных плоских пружин.
Длина дополнительных плоских пружи оптимально находится в пределах 0,5 0,75 длины основных пружин, при этом обеспечивается достаточное их взаимное перекрытие для повышения момента сопротивления кручению средней части рессоры и наличие относительно тонких участков по концам основной плоской пружины для обеспечения достаточно низкой изгибной жесткости для деформации параллелограмма. Благодаря консольному закреплению дополнительных пружин, их свободные части перемеща- ются с трением по поверхности основно плоской пружины при ее изгибной деформации, что создает дополнительное демпфирование для гашения колебаний грузоприемной платформы, закрепленной на параллелограмме. Наибольший эффект по повышению жесткости упругого параллелограмма на скручивание достигается за счет связи верхних или нижних пар рессор посредством прямоугольной пластины, имеющей большой момент сопротивления кручению. Длина прямоугольной пластины равна 0,6-0,9 длины рессор с тем, чтобы на ее концах имелись участки с достаточно низкой изгибной жесткостью. Может быть ис
пользована комбинация, при которой, например, верхние рессоры связаны пластиной, а нижние рессоры выполнены с дополнительными плоскими пружинами.
Ф
о р м у л а
изобретения
15
20
5
0
. д
0
5
связанную с датчиком силы, упругий параллелограммный механизм с гасителем колебаний и ограничители, отличающееся тем, что,с целью повышения точности за счет защиты датчика силы от перегрузок, упругий параллелограммный механизм образован стойкой и четырьмя параллельными рессорами, между упругим параллелограм- мным механизмом и грузоприемной платформой установлены соединительные кронштейны, а датчик силы другим кон- - цом связан со стойкой упругого парал- лелограммного механизма и размещен между рессорами.
I
на планке соединительного кронштейна.
1
| Грузоприемное устройство для безрычажных весов | 1984 |
|
SU1223047A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
