Изобретение относится к измерительной технике, предназначено для измерения механических величин - давления, деформаций, перемещений, и может быть использовано в средствах автоматизации контроля технологических процессов сложных технических систем топливоэнергетического комплекса, АЭС, автомобильного и железнодорожного транспорта и других отраслях промышленности.
Известно большое количество разнообразных по исполнению датчиков физических величин: механических (давления, перемещения, удара); температуры; химических (влажности, концентрации газов); электромагнитных (электрического и магнитного полей), выполненных с использованием чувствительного элемента (ЧЭ) на поверхностных акустических волнах (ПАВ) [1].
Существует тензочувствительный датчик на поверхностных акустических волнах (ПАВ) [2], содержащий пьезоэлектрический звукопровод, в котором считывание измеряемого усилия проводят за счет перемещения упругого элемента, изменяющего время распространения ПАВ в звукопроводах от встречно-штыревых преобразователей до считывающих электродов.
Недостатком всех известных конструктивных и схемных решений датчиков с использованием ПАВ-приборов в качестве ЧЭ является необходимость подачи электрических смещений на ПАВ-прибор и организации линий связи с вынесенными вне поля действия физических величин эталонными ПАВ-приборами аналогичного назначения и электронных схем для выделения разностного сигнала между тестовым и эталонным ПАВ-приборами, так называемых устройств связи с объектом (УСО).
Наиболее близким к заявляемому устройству является датчик давления [3], который содержит корпус со штуцером, мембрану, расположенную в соединенной со штуцером камере в корпусе, линии задержки на поверхностных акустических волнах (ПАВ) с входными и выходными встречно-штыревыми преобразователями и электронную схему, в которую входят ПАВ-автогенераторы, каждый из которых образован включением усилителя между входным и выходным встречно-штыревым преобразователями каждой линии задержки, блок вычитания частот, причем после мембраны по другую сторону от штуцера установлена неподвижная пластина, на каждой стороне которой образована линия задержки, на стороне мембраны, обращенной к стороне неподвижной пластины с одной из линий задержки в области расположения линии задержки, выполнен металлизированный участок длиной не более акустической длины линии задержки, расстояние между обращенными друг к другу линией задержки на неподвижной части и металлизированным участком на мембране составляет не более четверти длины волны ПАВ, а в электронную схему датчика введены формирователи импульсов, каждый из которых соединен с выходом соответствующего ПАВ-автогенератора, а выходом - с одним из входов блока вычитания частот,
Недостатком данного устройства является необходимость подачи напряжения питания для обеспечения функционирования электронных схем в составе датчика. Также корпус самого датчика давления не герметизирован, а наличие возможности воздействия влаги, масла, загрязнений на поверхность линий задержки на ПАВ приводит к снижению его надежности.
Техническим результатом заявляемого устройства является обеспечение энергонезависимой работы датчика механических величин, а также исключение прямого измеряемого механического воздействия и воздействия окружающей среды на поверхность устройств на поверхностных акустических волнах.
Технический результат достигается тем, что в датчике механических величин устройство на поверхностных акустических волнах выполнено в виде резонатора с входным и выходным встречно-штыревыми преобразователями, который заключен в герметичный корпус с осушенной контролируемой средой, а входной и выходной встречно-штыревой преобразователи через гермовыводы подключены к управляющему органу, выполненному в виде микропереключателя, связанному через регулирующий элемент с преобразователем “механическая величина - перемещение” в виде сильфона.
В датчике механических величин устройство на поверхностных акустических волнах выполнено в виде линии задержки на поверхностных акустических волнах с входным и несколькими выходными встречно-штыревыми преобразователями, заключено в герметичный корпус с осушенной контролируемой средой и через гермовыводы каждый выходной встречно-штыревой преобразователь подключен к управляющему органу, выполненному в виде нескольких микропереключателей, связанному через регулирующий элемент с преобразователем “механическая величина - перемещение” в виде сильфона. Количество выходных встречно-штыревых преобразователей и соответствующее ему число микропереключателей равно количеству значений измеряемой величины.
В датчике механических величин устройство на поверхностных акустических волнах выполнено в виде линии задержки на поверхностных акустических волнах с входным и выходным встречно-штыревыми преобразователями, заключено в герметичный корпус с осушенной контролируемой средой и через гермовыводы выходной преобразователь подключен к управляющему органу, выполненному в виде катушки индуктивности, в который установлен регулирующий элемент в виде стержня из ферромагнитного или диамагнитного материала, связанный с преобразователем “механическая величина - перемещение” в виде сильфона.
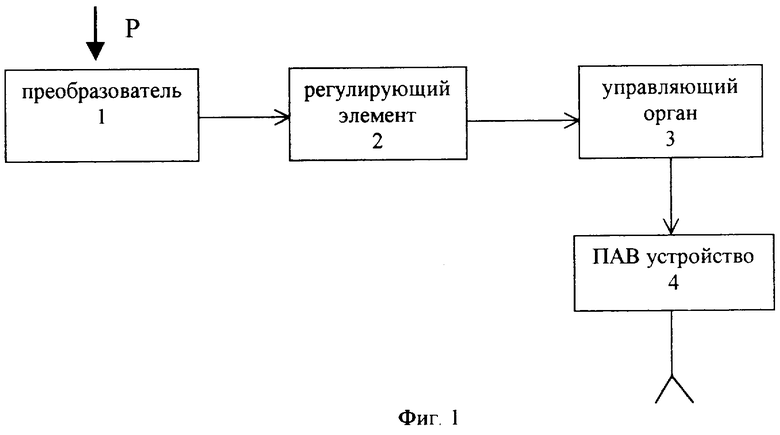
На фиг.1 схематично показан датчик механических величин; на фиг.2 изображен сигнализатор давления; на фиг.3 показана зависимость изменения амплитуды измеряемого задержанного сигнала от управляющего механического воздействия; на фиг.4 - многоуровневый сигнализатор давления; на фиг.5 - зависимость изменения амплитуды измеряемых задержанных сигналов от управляющего механического воздействия - давления; на фиг.6 - датчик давления; на фиг.7 - зависимость изменения амплитуды измеряемого задержанного сигнала от управляющего механического воздействия.
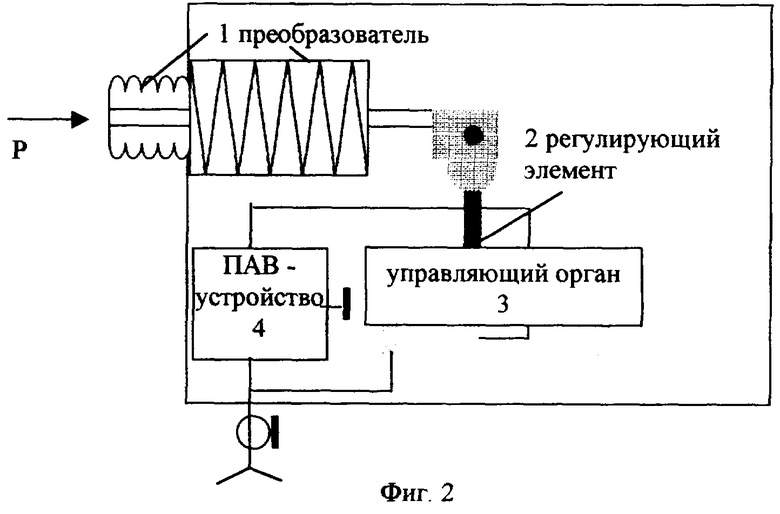
Преобразователь 1 "механическая величина - перемещение" выполнен в виде сильфона и через регулирующий элемент 2, который устанавливает порог срабатывания датчика, связан с управляющим органом 3. Устройство на поверхностных акустических волнах 4 через гермовыводы подключено к управляющему органу 3. ПАВ-устройство заключено в герметичный корпус с осушенной контролируемой средой, состоящей из смеси газов - аргона 95% и гелия 5%, либо азота 95% и гелия 5%.
Предлагаемые датчики работают следующим образом.
Сигнализатор давления (фиг.2).
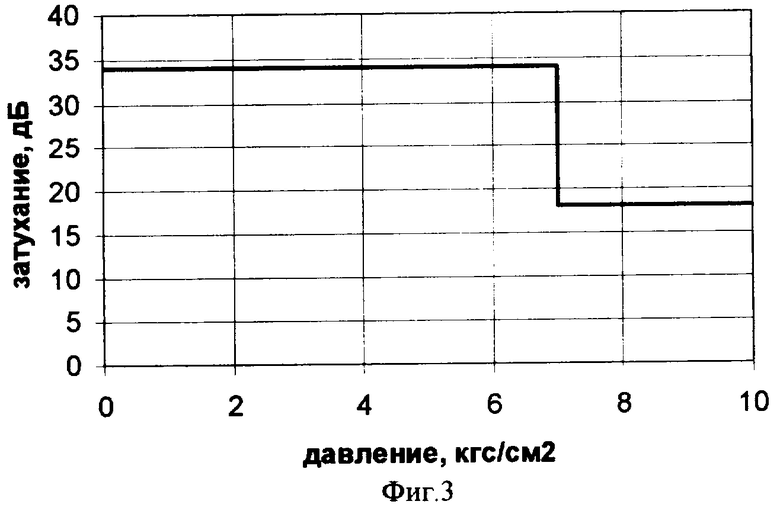
При воздействии механической величины Р на преобразователь 1 "механическая величина - перемещение" происходит его перемещение, пропорциональное приложенной силе, которое преобразуется через регулирующий элемент 2, устанавливающий порог срабатывания датчика, в управляющие механические воздействия на управляющий орган 3. В качестве управляющего органа использован микропереключатель, один контакт которого подключен к входному встречно-штыревому преобразователю резонатора, а второй контакт соединен с выходным встречно-штыревым преобразователем резонатора. В результате контакты микропереключателя замыкаются, что приводит к замыканию входного и выходного встречно-штыревых преобразователей в структуре резонатора. На фиг.3 показана зависимость изменения амплитуды измеряемого задержанного сигнала от управляющего механического воздействия.
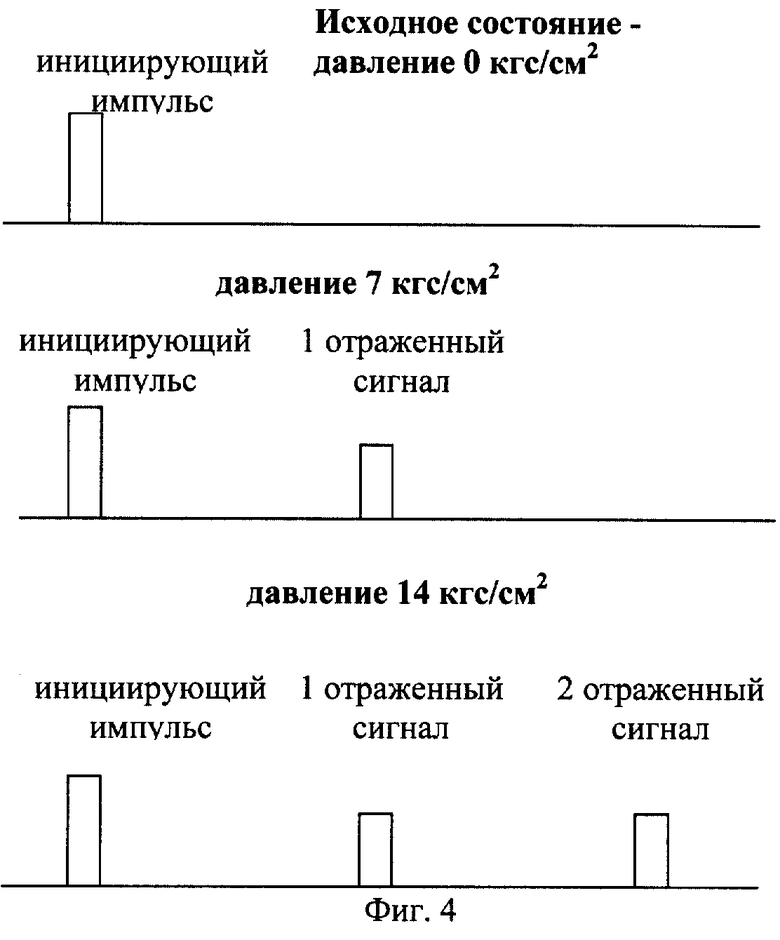
Многоуровневый сигнализатор давления (фиг.4).
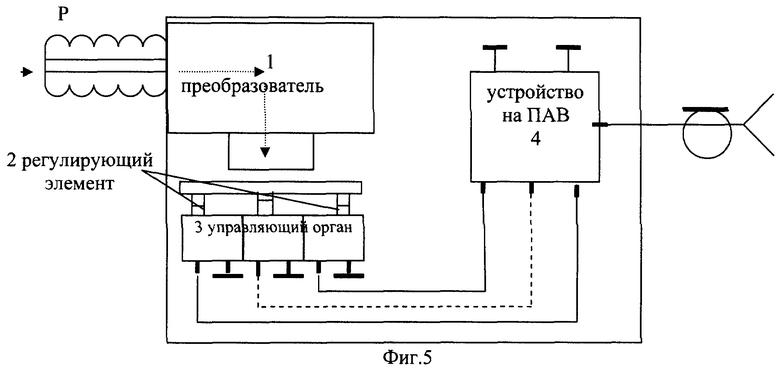
При воздействии механической величины Р на преобразователь 1 "механическая величина - перемещение" происходит его перемещение, пропорциональное приложенной силе, которое преобразуется через регулирующие элементы 2 в управляющие механические воздействия на управляющий орган 3. С помощью регулирующих элементов 2 устанавливаются пороги срабатывания датчика. Управляющий орган выполнен в виде нескольких микропереключателей, причем каждый микропереключатель одним своим контактом соединен с одним выходным встречно-штыревым преобразователем линии задержки, а другим контактом - с общей шиной (землей). В результате воздействия управляющих механических воздействий контакты микропереключателей поочередно замыкаются, что приводит к коммутации на землю выходных встречно-штыревых преобразователей линии задержки. На фиг.5 показана зависимость изменения амплитуды измеряемых задержанных сигналов от управляющего механического воздействия - давления.
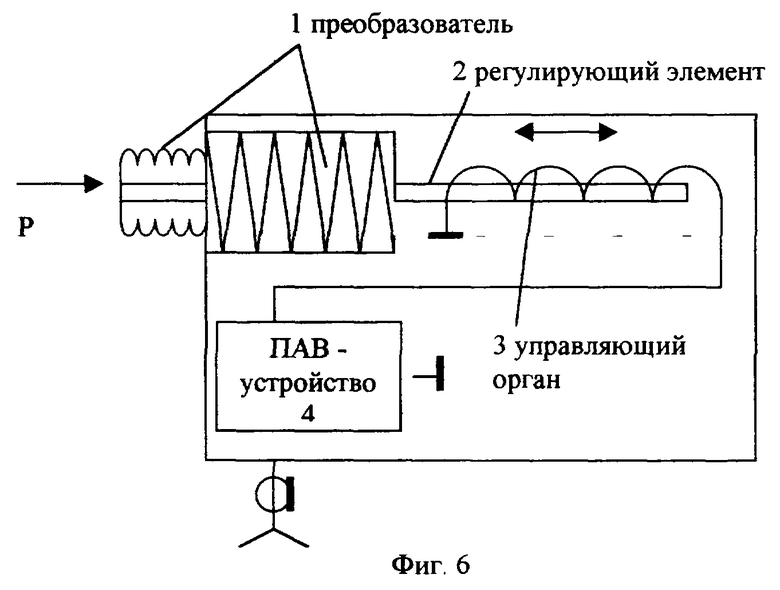
Датчик давления (фиг.6).
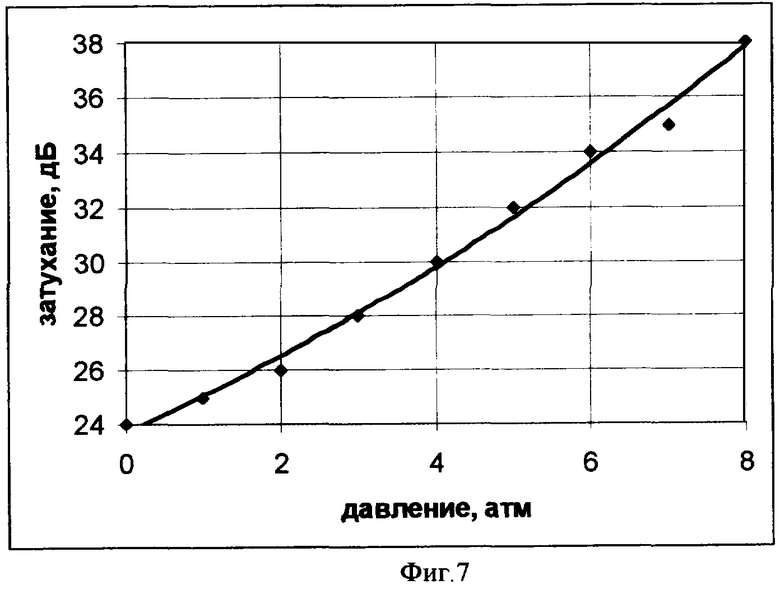
При воздействии механической величины Р на преобразователь 1 "механическая величина - перемещение" происходит его перемещение, пропорциональное приложенной силе, которое преобразуется через регулирующий элемент 2 в управляющие механические воздействия на управляющий орган 3. Регулирующий элемент 2 выполнен в виде стержня из ферромагнитного или диамагнитного материала, установленного в управляющий орган - катушку индуктивности и перемещаемого в ней в прямом и обратном направлении линейно под действием преобразователя "механическая величина - перемещение". В результате изменения параметра управляющего органа (катушки индуктивности, подключенной к выходному встречно-штыревому преобразователю линии задержки) изменяется амплитуда измеряемого задержанного сигнала. На фиг.7 показана зависимость изменения амплитуды измеряемого задержанного сигнала от управляющего механического воздействия.
Использование предлагаемого изобретения позволяет исключить прямое воздействие механической величины на устройство на поверхностных акустических волнах за счет того, что воздействие осуществляется через сочленные звенья (преобразователь “механическая величина - перемещение”, регулирующий элемент, управляющий орган). Кроме того, принцип функционирования такого датчика позволяет заключать устройство на ПАВ в герметичный корпус, что обеспечивает исключение воздействия окружающей среды на поверхность устройства на ПАВ.
Литература
1. Малов В.В. Пьезорезонансные датчики. 2-е изд. перераб. и дополнен./ М.Ж ЭНЕРГОАТОМИЗДАТ, 1989. - 271 с.
2. Я.Н.Пугачев. Тензочувствительный датчик на поверхностных акустических волнах (ПАВ) / Государственный комитет СССР по делам изобретений и открытий: Патент SU №1159153, МПК Н 03 Н 9/00, G 01 L 9/08, опубл. БИ №20, 1985 г.
3. RU 2036446 С1 (Баженов В.И.), 27.05.1996. Датчик давления (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОНДЕР | 1997 |
|
RU2133482C1 |
| АДСОРБЦИОННЫЙ ДАТЧИК ГАЗА | 1994 |
|
RU2084882C1 |
| Регулируемая линия задержки на поверхностных акустических волнах | 1987 |
|
SU1691928A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ИНЖЕНЕРНЫХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2471161C1 |
| ГИДРОФОН НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2008 |
|
RU2368099C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1992 |
|
RU2036446C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР | 2008 |
|
RU2381510C1 |
| АКУСТОЭЛЕКТРОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1990 |
|
RU2016406C1 |
| Регулируемая ультразвуковая линия задержки на поверхностных акустических волнах | 1990 |
|
SU1818681A1 |
| УСТРОЙСТВО СВЯЗИ | 1997 |
|
RU2116700C1 |
Изобретение относится к измерительной технике, предназначено для измерения механических величин - давления, деформаций, перемещений, и может быть использовано в средствах автоматизации контроля технологических процессов сложных технических систем топливоэнергетического комплекса, АЭС, автомобильного и железнодорожного транспорта и других отраслях промышленности. Технический результат: исключение прямого механического воздействия и окружающей среды на ПАВ устройство. Сущность изобретения: в датчике механических величин ПАВ устройство заключено в герметичный корпус с осушенной контролируемой средой и через гермовыводы подключено к управляющему органу, связанному через регулирующий элемент с преобразователем "механическая величина - перемещение", выполненному в виде сильфона. Управляющий орган выполнен в виде микропереключателя, а в качестве ПАВ устройства используется резонатор или управляющий орган выполнен из нескольких микропереключателей, усилие срабатывания каждого из которых регулирующим элементом настроено на локальный диапазон воздействия фиксированного дискретного уровня физической величины, например верхнего и нижнего, а в качестве ПАВ устройства используется отражательная линия задержки с двумя активными отражателями. Регулирующий элемент выполнен в виде стержня из ферромагнитного или диамагнитного материала, установленного в управляющий орган в виде катушки индуктивности, а в качестве ПАВ устройства используется отражательная линия задержки. 3 н.п. ф-лы, 7 ил.
| ДАТЧИК ДАВЛЕНИЯ | 1992 |
|
RU2036446C1 |
| Тензочувствительный датчик на поверхностных акустических волнах | 1983 |
|
SU1159153A1 |
| СПОСОБ ОБРАБОТКИ СЕЙСМОЛОГИЧЕСКИХ ДАННЫХ | 0 |
|
SU397873A1 |
| Ультразвуковая линия задержки на поверхностных акустических волнах | 1981 |
|
SU980254A1 |
| Способ усиления поверхностных акустических волн | 1977 |
|
SU627557A1 |
| Акустический резонатор | 1979 |
|
SU860281A1 |
| ДАТЧИК ДАВЛЕНИЯ | 0 |
|
SU297885A1 |

