Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и систем управления подвижных объектов, и предназначено для измерения линейного ускорения и угловой скорости в этих системах.
Известные микромеханические гироскопы-акселерометры широко используются в инерциальной навигации и в системах наведения. Преимуществом этих гироскопов-акселерометров являются малые массы и габариты. Недостатком этих гироскопов-акселерометров является низкая точность. К областям применения, требующим гироскопов-акселерометров более точных, относятся системы автомобильной безопасности (системы против скольжения, системы камер), потребительские товары (видеокамеры, GPS, спортивное оборудование), промышленные товары (роботы, управление оборудованием), медицинские изделия (хирургические инструменты). [Патент США №5,392,650 от 28.02.1995 г.].
Такие гироскопы-акселерометры представляют собой пластину, закрепленную на торсионах и совершающую вынужденные колебания на собственной резонансной частоте. Этот гироскоп-акселерометр приводится в колебательное движение путем подачи сигнала на драйвер (как правило, электростатический). При внешнем вращении микромеханического гироскопа возникает сила Кориолиса, создающая колебания относительно измерительной оси. При этом зазор между подвижной массой микромеханического гироскопа и основанием изменяется, что приводит к изменению расстояния между электродами и соответствующей величины емкости. Измеряя изменение величины емкости, можно определить изменение угловой скорости вращения микромеханического гироскопа и одновременно измерить линейное ускорение.
Однако вышеуказанный гироскоп-акселерометр имеет низкую точность.
Наиболее близким по технической сущности к изобретению является гироскоп-акселерометр [Патент РФ №2162229 от 20.01.2001 г.]: микромеханический вибрационный гироскоп-акселерометр, содержащий плату из диэлектрического материала с напылением на ней электродов датчика угла и датчика момента и инерционную массу, расположенную с зазором относительно платы и связанную с ней через упругие балочки, которые одними концами жестко прикреплены к опорам, расположенным на плате, а вторыми - к инерционной массе, выполненной в виде пластины из электропроводного материала со сквозными отверстиями и боковыми гребенчатыми зубцами электродов пластины. При этом на плате закреплены электроды системы возбуждения с гребенчатыми зубцами, установленные с возможностью электромагнитного взаимодействия с инерционной массой в плоскости ее пластины через боковые зазоры, и взаимопроникающие друг в друга гребенки электродов, причем электроды соединены с электронной схемой обработки сигналов. В пластине выполнены по меньшей мере две сквозные параллельные прорези от периферии пластины до линии ее геометрического центра, в местах их пересечения с которой к пластине прикреплены вторые концы упругих балочек, установленных в указанных прорезях с возможностью совершения колебаний в плоскости пластины и ортогонально к ней.
Недостатком этого гироскопа является низкая точность и соответственно невозможность использования его для высокоточных измерений, основной причиной низкой точности является то, что информационным параметром является амплитуда колебаний.
Вышеизложенные факты приводят к снижению точности оценивания угловой скорости и линейного ускорения, что и является недостатком прототипа.
Задачей настоящего изобретения является разработка гироскопа-акселерометра на поверхностных акустических волнах (ПАВ) с улучшенными характеристиками измерения угловой скорости и линейного ускорения.
Техническим результатом является повышение точности и чувствительности измерений.
Технический результат достигается тем, что гироскоп-акселерометр, содержащий драйвер и соединенные между собой не менее одного чувствительного к деформациям элемента и не менее одной инерционной массы, при этом чувствительный к деформациям элемент выполнен из пьезоэлектрического материала, на поверхности чувствительного элемента сформированы не менее одного встречно-штыревого преобразователя (ВШП) и не менее одной отражающей структуры, а драйвер также выполнен из пьезоэлектрического материала.
Технический результат достигается за счет того, что под действием силы Кориолиса приходят в колебательное движение инерционные массы, деформирующие выполненные из пьезоэлектрического материала (например, из кварца) чувствительные к деформациям элементы. Деформации чувствительных к деформациям элементов приводят к изменениям местной скорости ПАВ, что влечет за собой изменения собственной резонансной частоты или фазы гироскопа-акселерометра. Основным отличием от прототипа является частотный выход предлагаемого гироскопа-акселерометра. Основной причиной повышения точности является то, что информационным параметром в предлагаемом устройстве является частота.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства, гироскопа-акселерометра, отсутствуют, поэтому заявленное изобретение соответствует условию "новизна".
В настоящее время авторам не известны вибрационные гироскопы-акселерометры, которые имели бы такую высокую чувствительность и динамический диапазон, подходящий для многих промышленных применений, которые обеспечивает предлагаемая конструкция гироскопа-акселерометра. Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков прототипов, совпадающих с отличительными признаками заявленного изобретения, показали, что отличительные признаки заявленного изобретения не следуют явным образом из уровня развития техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
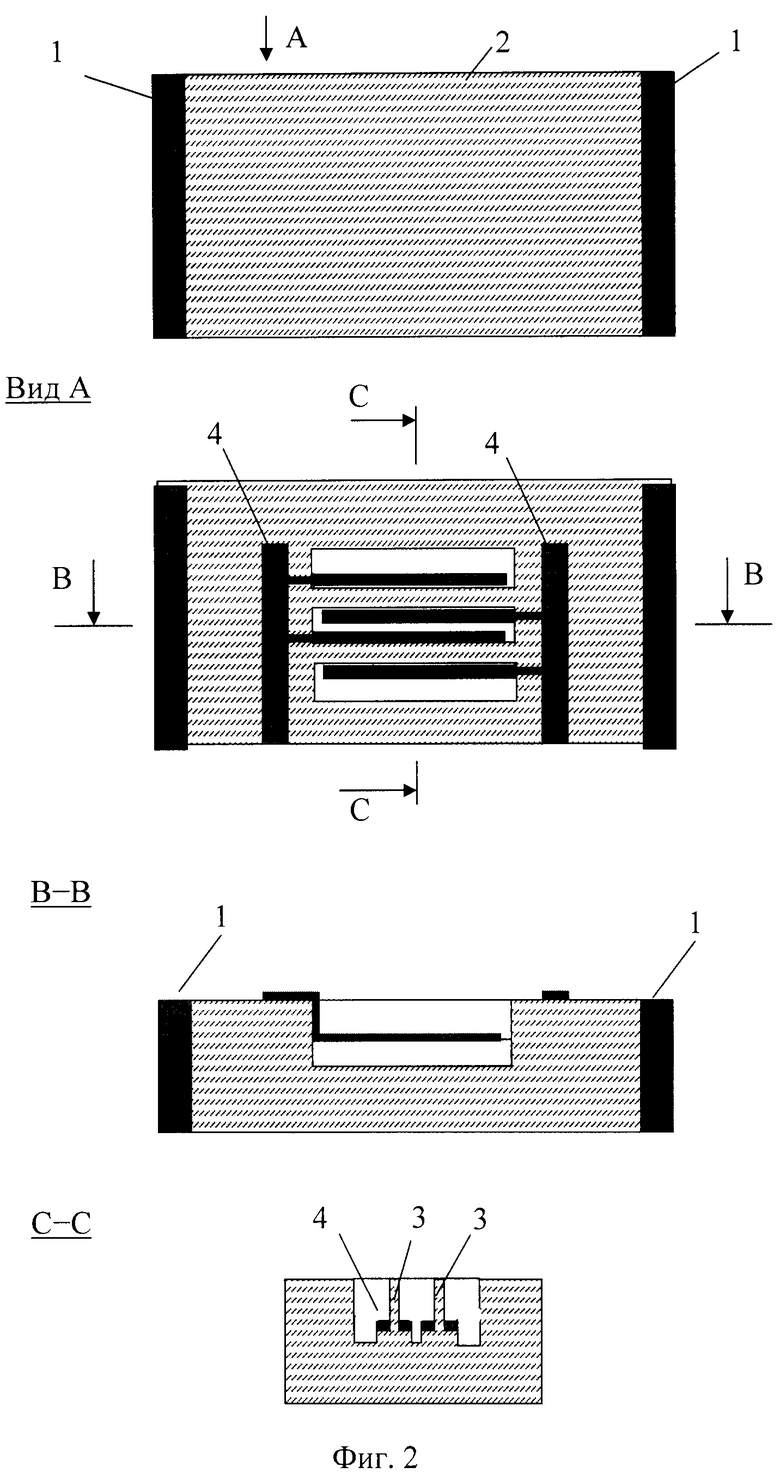
Сущность изобретения поясняется чертежами, где на фиг.1 представлена конструкция гироскопа-акселерометра, на фиг.2 - вариант конструкции гироскопа-акселерометра с канавками.
Гироскоп-акселерометр состоит из драйвера 1, выполненного, например, из кварца, ниобата лития или пьезокерамики с проводящими электродами [1], соединенных между собой не менее одного чувствительного к деформациям элемента 2 и не менее одной инерционной массы 3.
Чувствительный к деформациям элемент 2 выполнен из пьезоэлектрического материала, например из кварца.
Инерционные массы выполнены, например, из металла или из кварца.
На поверхностях чувствительных к деформациям элементов на ПАВ 2 сформированы ВШП 4 и отражающие структуры 5.
Взаимное расположение и геометрические размеры ВШП 4 и отражающих структур 5 выбраны так, чтобы образованное ими акустоэлектронное устройство имело резонансные свойства или формировало временную задержку [1].
Во всех случаях должно быть сформировано не менее одного ВШП 4 и не менее одной отражающей структуры 5. На фиг.1 показано два варианта реализации гироскопа-акселерометра: 1.1. - один чувствительный к деформациям элемент; 1.2 - два чувствительных к деформациям элемента.
В чувствительном к деформациям элементе 2 могут быть сформированы канавки для углубления ВШП ПАВ 4 и формирования инерционных масс 5 (фиг.2).
Отражающие структуры 5 могут быть выполнены в виде канавок методами травления, например ионно-плазменного, ВШП ПАВ 4 могут быть выполнены методами фотолитографии. Отражающие структуры 5 могут быть выполнены в виде штырей (например, металлизированных).
Встречно-штыревой преобразователь ПАВ 4 и отражающие структуры 5 могут образовывать не менее одной линии задержки на поверхностных акустических волнах. Встречно-штыревой преобразователь ПАВ 4 и отражающие структуры 5 могут образовывать не менее одного резонатора на поверхностных акустических волнах. Резонаторы и линии задержки могут быть расположены по разные стороны от драйвера. Встречно-штыревые преобразователи ПАВ 4 могут быть расположены в канавках. Чувствительный к деформациям элемент 2 может иметь утолщение в месте крепления драйвера. Драйвер может быть выполнен из пьезокерамики.
Устройство работает следующим образом.
При отсутствии вращения основания гироскопа-акселерометра на драйвер от внешнего генератора (на фиг.1 и 2 не показан) подается электрический сигнал с заданной частотой νg.
При отсутствии вращения вибрационного гироскопа-акселерометра на ПАВ сила Кориолиса не возникает, поэтому не происходит и соответствующего движения чувствительного к деформациям элемента 2 и инерционных масс 3.
Следовательно, чувствительный к деформациям элемент 2 деформируется только под действием линейного ускорения.
Свойства акустоэлектронного устройства на ПАВ, сформированного ВШП 4 и отражающими структурами 5, например резонатора или линии задержки, будут изменяться под действием деформации, вызванной силами инерции [1].
По изменению низкочастотной составляющей параметров акустоэлектронного устройства (резонансной частоты резонатора или фазы сигнала, задержанного на линии задержки) измеряют линейное ускорение.
Высокочастотное изменение параметров акустоэлектронного устройства, соответствующее частоте драйвера 1, не происходит.
Таким образом, выходной сигнал (параметр fу) акустоэлектронного устройства имеет вид:

где f0 - значение параметра при равенстве нулю угловой скорости и линейного ускорения; fa - низкочастотная составляющая параметра fу, соответствующая действующему линейному ускорению; fω - высокочастотная составляющая параметра
fу, соответствующая угловой скорости ω.
Если драйвер совершает гармоническое движение с частотой νg, составляющая fω в первом приближении имеет вид

где i - мнимая единица; t - время; Аω - амплитуда.
Величина угловой скорости ω определяется величиной амплитуды Аω.
Для определения амплитуды Аω необходимо отфильтровать выходной сигнал fу с помощью узкополосного фильтра [1] и оценить амплитуду периодического сигнала, например, как половину разности максимального и минимального значений.
В предположении, что частотный диапазон измеряемых линейных ускорений ограничен частотой fB, величину линейного ускорения оценивают по сигналу fНа на выходе фильтра с верхней граничной частотой fB:

В большинстве случаев fB≤500 Гц.
При наличии угловой скорости ω вращения гироскопа-акселерометра появляется сила Кориолиса. В результате воздействия силы Кориолиса происходит деформация чувствительного к деформациям элемента 2 и движение инерционных масс 3.
Одновременно на чувствительный к деформациям элемент 2 и инерционных масс 3 действует и линейное ускорение.
В результате выходной сигнал акустоэлектронного устройства также определяется уравнениями (1)-(3).
Величина угловой скорости определяется амплитудой Аω, а величина линейного ускорения - низкочастотной составляющей fa выходного сигнала акустоэлектронного устройства в соответствии с формулой (3).
Резонансную частоту акустоэлектронного устройства измеряют, например, анализатором спектра, а изменение фазы - фазометром [1]. Составляющая fω (резонансная частота или фаза) выходного сигнала fу связаны однозначной зависимостью с величиной угловой скорости вращения, а составляющая fa - с величиной линейного ускорения [1]. Угловую скорость и линейное ускорение определяют, например, по градуировочной характеристике гироскопа-акселерометра.
Встречно-штыревой преобразователь ПАВ 4 и отражающие структуры 5 могут образовывать не менее одной линии задержки на поверхностных акустических волнах. Встречно-штыревой преобразователь ПАВ 4 и отражающие структуры 5 могут образовывать не менее одного резонатора на поверхностных акустических волнах. Резонаторы и линии задержки могут быть расположены по разные стороны от драйвера. Встречно-штыревые преобразователи ПАВ 4 могут быть расположены в канавках. Чувствительный к деформациям элемент 2 может иметь утолщение в месте крепления драйвера. Драйвер может быть выполнен из пьезокерамики. При этом работа устройства аналогична сформулированному выше.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполнены следующие условия:
- средство, воплощающие устройство-изобретение при его осуществлении, предназначено для использования в приборостроении, а именно в системах навигации динамических объектов, в системах управления, в том числе в автомобильной промышленности и робототехнике;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Морган Д. Устройства обработки сигналов на поверхностных акустических волнах / Пер. с англ. М.: Радио и связь, 1990, 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2310165C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЕФОРМАЦИИ С ДИСПЕРСИОННЫМИ СТРУКТУРАМИ | 2008 |
|
RU2396526C2 |
| РЕЗОНАТОР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С КАНАВКАМИ | 2008 |
|
RU2366078C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 2010 |
|
RU2435148C1 |
| ПЕРВИЧНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗОВ, ЖИДКОСТЕЙ, СОСРЕДОТОЧЕННЫХ СИЛ | 2006 |
|
RU2327126C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2012 |
|
RU2494358C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЗАПРОСНОГО СИГНАЛА ДЛЯ ДАТЧИКА НА ПАВ С ОТРАЖАЮЩИМИ СТРУКТУРАМИ | 2012 |
|
RU2488921C1 |
| РЕЗОНАТОР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2017 |
|
RU2643501C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2348902C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 2012 |
|
RU2492461C1 |
Изобретение относится к области приборостроения, а именно к приборам ориентации, навигации и систем управления подвижных объектов, и предназначено для измерения угловой скорости и линейного ускорения. Техническим результатом изобретения является повышение точности и чувствительности измерений. Гироскоп-акселерометр содержит драйвер и соединенные между собой не менее одного чувствительного к деформациям элемента и не менее одной инерционной массы. Чувствительный к деформациям элемент выполнен из пьезоэлектрического материала. На поверхности чувствительного элемента сформированы не менее одного встречно-штыревого преобразователя и не менее одной отражающей структуры, а драйвер выполнен из пьезоэлектрического материала. При этом встречно-штыревой преобразователь и отражающие структуры образуют не менее одной линии задержки на поверхностных акустических волнах. 6 з.п. ф-лы, 2 ил.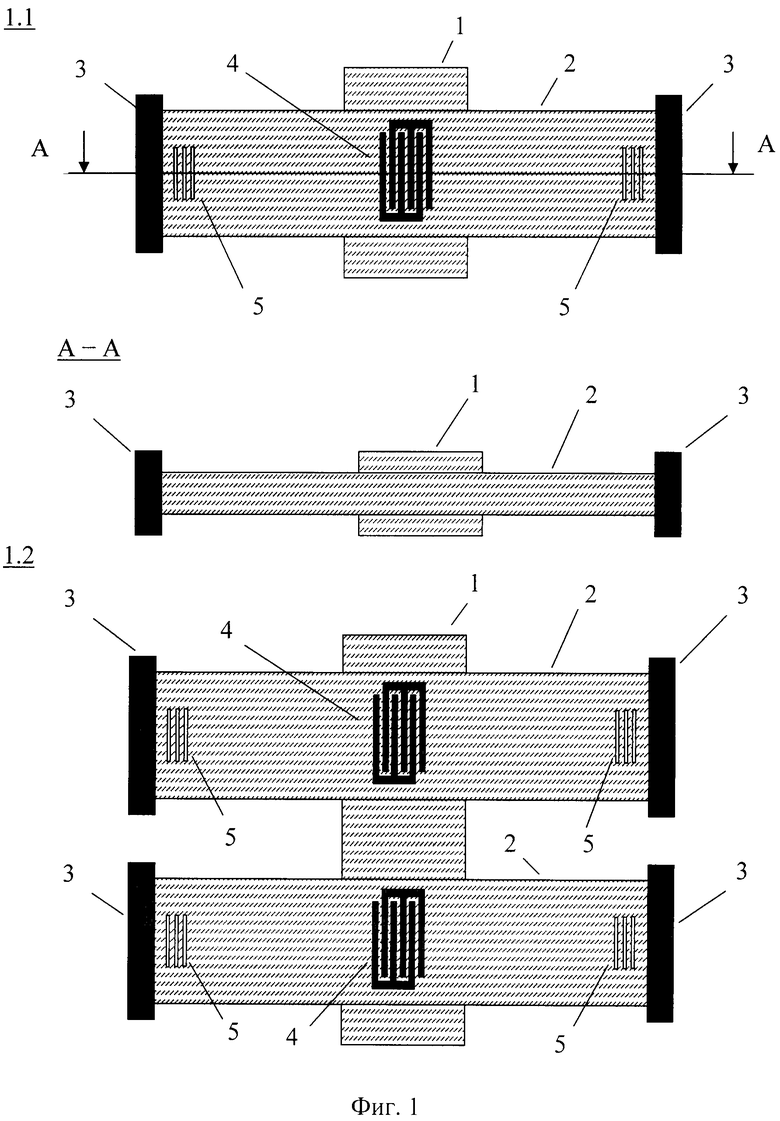
1. Гироскоп-акселерометр, содержащий драйвер и соединенные между собой не менее одного чувствительного к деформациям элемента и не менее одной инерционной массы, отличающийся тем, что чувствительный к деформациям элемент выполнен из пьезоэлектрического материала, на поверхности чувствительного элемента сформированы не менее одного встречно-штыревого преобразователя и не менее одной отражающей структуры, а драйвер выполнен из пьезоэлектрического материала.
2. Гироскоп-акселерометр по п.1, отличающийся тем, что встречно-штыревой преобразователь и отражающие структуры образуют не мене одной линии задержки на поверхностных акустических волнах.
3. Гироскоп-акселерометр по п.1, отличающийся тем, что встречно-штыревой преобразователь и отражающие структуры образуют не менее одного резонатора на поверхностных акустических волнах.
4. Гироскоп-акселерометр по любому из пп.2 и 3, отличающийся тем, что резонаторы и линии задержки расположены по разные стороны от драйвера.
5. Гироскоп-акселерометр по п.1, отличающийся тем, что в чувствительном к деформациям элементе встречно-штыревые преобразователи расположены в канавках.
6. Гироскоп-акселерометр по п.1, отличающийся тем, что чувствительный к деформациям элемент имеет утолщение в месте крепления драйвера.
7. Гироскоп-акселерометр по п.1, отличающийся тем, что драйвер выполнен из пьезокерамики.
| US 6516665 B1, 11.02.2003 | |||
| ДАТЧИК УГЛОВОГО И ЛИНЕЙНОГО ПОЛОЖЕНИЯ | 1997 |
|
RU2117916C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| Линейный акселерометр | 1990 |
|
SU1781614A1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2005 |
|
RU2284528C1 |

