Изобретение относится к области спутниковой навигации и может быть использовано для определения положения мобильных объектов в пространстве и управления ими.
Известны способы навигации объектов по сигналам глобальных навигационных спутниковых систем, основанные на приеме сигналов от навигационных космических аппаратов (НКА) глобальных навигационных спутниковых систем, измерении псевдодальностей между НКА и объектом и определении положения объекта путем решения системы уравнений на основе измеренных псевдодальностей и рассчитанных координат НКА. При этом для повышения точности позиционирования используют опорные пункты, с которых на объект передают корректирующую информацию, позволяющую снизить естественные погрешности измерения псевдодальностей (см. RU 2185637, G 01 S 5/00 20.07.2002, RU 2213979, G 01 S 11/00, 10.01.2003, US 6662108, G 01 C 21/26, 09.12.2003, US 2003/0145328, G 01 S 5/00, 31.01.2003).
Недостатком известных методов является зависимость точности позиционирования объектов от расстояния до опорного пункта. Кроме того, не решается задача управления мобильными объектами.
Технический результат - повышение точности позиционирования и обеспечение возможности управления мобильными объектами.
Для достижения этого результата вокруг каждого телецентра образуется зона из “m” контрольно-корректирующих станций (ККС), формирующих локальные дифференциальные поправки по сигналам навигационных космических аппаратов (НКА), которые по радиоканалу передаются на телецентр, и далее через передатчик телецентра без нарушения текущего вещания передаются на мобильный объект, который по сигналам НКА с учетом локальных дифференциальных поправок определяет собственные координаты, передаваемые по радиоканалу в телецентр, откуда они передаются в пункт управления движением. Из пункта управления движением сигналы управления движением вместе с координатами объекта передаются на ближайший к мобильному объекту диспетчерский пункт по спутниковым каналам связи, где формируются сигналы целеуказания мобильному объекту, которые посредством передатчика телецентра адресно передаются на мобильный объект.
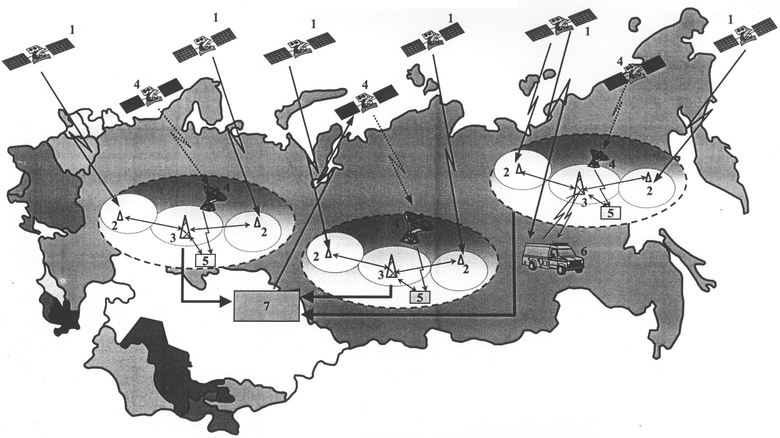
На чертеже изображена структурная схема системы, реализующей способ.
Система содержит навигационные космические аппараты (НКА) (1), контрольно-корректирующие станции (2), телецентры (3), устройства космической связи (4), диспетчерские пункты (5), мобильный объект (6), пункт управления движением (7).
Способ точного позиционирования и мониторинга мобильных объектов реализуется следующим образом.
С помощью системы позиционирования мобильный объект, принимая сигналы от НКА (1) и локальные дифференциальные поправки, передаваемые посредством телевизионного сигнала, определяет свои координаты.
Локальные дифференциальными поправками называются поправки, сформированные локальными дифференциальными системами. Локальными дифференциальными системами называются системы с дальностью действия не более 200 км (см. “Глобальная спутниковая радионавигационная система ГЛОНАСС” под редакцией В.Н.Харисова, М., ИПРЖР, 1998 г., с.18-27).
Локальные дифференциальные системы обычно включают одну ККС (2).
Контрольно-корректирующие станции (2) формируют локальные дифференциальные поправки по сигналам с разных НКА (1).
Данные поправки передаются на местный телецентр (3), под которым в данном случае понимается приемопередающая аппаратура и антенна (телевышка). Не нарушая текущего вещания, поправки передаются от телецентра (3) на мобильные объекты (6), где они учитываются при определении местоположения.
Определив местоположение, мобильный объект (6) передает информацию о своих координатах по радиоканалу на телецентр (3), откуда она поступает в пункт управления движением (7), который формирует стратегическую информацию по управлению мобильным объектом, указывая, например, в какую точку ему нужно переместиться. Эта информация, совместно с координатами мобильного объекта, по каналам космической связи (через устройства космической связи (4)) поступает на ближайший к мобильному объекту (6) диспетчерский пункт (5), который формирует тактическую информацию по управлению мобильным объектом (6) (привязка к местности, дороги и т.д.). Данная информация передается через передатчик местного телецентра (3) адресно-мобильному объекту (6).
Использование телецентров 3 (вышек антенн) позволяет охватить значительную территорию, на которой возможны позиционирование и мониторинг мобильных объектов (6) без создания новых систем, поскольку структура телецентров без каких-либо значительных доработок позволяет реализовать указанные действия. Использование космической связи позволяет производить мониторинг мобильных абонентов в глобальных масштабах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| ГЛОБАЛЬНАЯ ИНТЕГРИРОВАННАЯ СПУТНИКОВАЯ НАВИГАЦИОННО-КОМАНДНО-ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 2005 |
|
RU2304843C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| НАВИГАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2007 |
|
RU2365061C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСТОТЫ И ШКАЛЫ ВРЕМЕНИ УДАЛЕННЫХ ПУНКТОВ | 2015 |
|
RU2585325C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2014 |
|
RU2572589C1 |
| Система высокоточной дифференциальной коррекции для контроля подвижных объектов | 2019 |
|
RU2713571C1 |
Изобретение относится к области спутниковой навигации и может быть использовано для определения положения мобильных объектов в пространстве и управления ими. Технический результат - повышение точности позиционирования и обеспечения возможности управления мобильными объектами. Для обеспечения данного результата вокруг телецентров образуют зоны из “m” контрольно-корректирующих станций, где “m” - любое целое число, формирующих по сигналам навигационных космических аппаратов (НКА) локальные дифференциальные поправки, которые по радиоканалу передают в телецентр, и через передатчик телецентра, без нарушения текущего вещания, на мобильный объект, который по сигналам навигационных космических аппаратов с учетом локальных дифференциальных поправок определяет собственные координаты, которые по радиоканалу передаются в телецентр, откуда они передаются в пункт управления движением, при этом сигналы управления движением, формируемые в пункте управления движением, совместно с координатами мобильного объекта передают на ближайший к мобильному объекту диспетчерский пункт по спутниковым каналам связи, где формируются сигналы целеуказания мобильному объекту, которые посредством передатчика соответствующего телецентра адресно передают на мобильный объект. 1 ил.
Способ точного позиционирования и мониторинга мобильных объектов, заключающийся в том, что вокруг каждого телецентра образуют зоны из “m” контрольно-корректирующих станций, где m - любое целое число, формирующих по сигналам навигационных космических аппаратов локальные дифференциальные поправки, которые по радиоканалу передают на телецентр и, через передатчик телецентра, без нарушения текущего вещания, на мобильный объект, который по сигналам навигационных космических аппаратов с учетом локальных дифференциальных поправок определяет собственные координаты, которые по радиоканалу передаются на телецентр, откуда они передаются в пункт управления движением, при этом сигналы управления движением, формируемые в пункте управления движением, совместно с координатами мобильного объекта передают на ближайший к мобильному объекту диспетчерский пункт по спутниковым каналам связи, где формируются сигналы целеуказания мобильному объекту, которые посредством передатчика соответствующего телецентра адресно передают на мобильный объект.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
| СПОСОБ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ФАЗОВЫХ ИЗМЕРЕНИЙ В СИСТЕМЕ GPS | 2000 |
|
RU2213979C2 |
| US 6662108 A, 09.12.2003. | |||

