Изобретение относится к области спутниковой навигации и может быть использовано для определения углового положения объектов в пространстве или на плоскости.
Известен способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов (варианты) [1], в котором по варианту 1, основанному на приеме сигналов от n космических аппаратов двумя или более антенно-приемными устройствами, расположенными параллельно одной или двум осям объекта, выделении сигнала с частотой Доплера, определении набега фаз за интервал времени измерения и определении углового положения объекта, в течение интервала времени измерения производят m измерений фазовых сдвигов между парами антенно-приемных устройств, а угловое положение объекта определяют путем решения следующей системы уравнений:
где i=1,...,n; j=1,...,m; cos*βxyz= B•cosβxyz- произведение неизвестной базы В (расстояния между антенно-приемными устройствами) на ее направляющие косинусы cosβxyz, подлежащие определению; kxij, kyij, кzij - направляющие косинусы направлений потребитель - i-й навигационный космический аппарат (НКА); λi- длина волны сигнала i-гo НКА; ϕij- измеренные значения фазовых сдвигов сигналов i-гo НКА, принятых антеннами потребителя в j-м измерении; ΔФi- неизвестная систематическая погрешность измеренной разности фаз, обусловленная разным временем прохождения сигналов в каналах приемоиндикатора и неоднозначностью, вызванной тем, что расстояние между антеннами превышает длины волн принимаемых сигналов.
Недостатком способа и его вариантов является необходимость обеспечения неподвижности объекта во время проведения измерений.
Известен способ угловой ориентации объектов по сигналам космических аппаратов глобальных навигационных спутниковых систем [2], взятый в качестве прототипа, основанный на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные две или более антенны, расположенные параллельно одной или двум осям измеряемого объекта, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата и определении углового положения осей измеряемого объекта путем решения системы уравнений, в котором перед началом измерений или в процессе измерений углового положения осей объекта изменяют угловое положение векторов-баз, на концах которых расположены антенны, на произвольный угол, после чего антенны возвращают в исходное состояние, причем определение углового положения производится последовательным решением первой системы уравнений:
а также второй дополнительной системы уравнений
где kxij, kyij, kzij - известные коэффициенты, зависящие от координат космических аппаратов и объекта; Δkxij= kxij-kxi1, Δkyij= kyij-kyi1, Δkzij= kzij-kzi1- приращения коэффициентов; Δϕij= ϕij-ϕi1- разность фазовых сдвигов в i-м и первом измерениях; X0, Y0, Z0 - измеряемые направляющие косинусы; ΔXj, ΔYj, ΔZj- приращения направляющих косинусов; λi- длина волны i-гo космического аппарата; i - номер космического аппарата; j - номер измерения фазового сдвига, при этом на первом шаге в первой системе используется любое значение X0, Y0, Z0, например X0 = Y0 = Z0 = 0, а на втором и последующих шагах используется значение X0, Y0, Z0, соответствующее результату, полученному после решения систем уравнений на предыдущем шаге.
Недостатком прототипа является необходимость решения второй дополнительной системы уравнений для определения начального углового положения X0, Y0, Z0, которая является нелинейной. Кроме того, для определения углового положения необходимо изменить угловое положение векторов-баз, на концах которых расположены антенны, на произвольный угол, после чего возвратить антенны в исходное состояние. Выполнение этого условия требует наличия на борту объекта устройства поворота антенн или маневров самого объекта, что не всегда осуществимо, например, для малоподвижных объектов. Коэффициенты kxij, kyij, kzij, зависящие от координат космических аппаратов и объекта в дальнейших материалах заявки, называются направляющими косинусами векторов-направлений от объекта до i-гo космического аппарата в j-й момент времени.
В основу изобретения положена задача нахождения начального и текущего углового положения подвижного объекта, без необходимости принудительного изменения ориентации векторов-баз, на концах которых расположены антенны.
Поставленная задача решается тем, что в способе угловой ориентации объекта по сигналам спутниковых радионавигационных систем, основанном на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные две или более антенны, расположенные параллельно одной или двум осям измеряемого объекта, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, согласно изобретению, в течение интервала времени измерения проводят m измерений фазовых сдвигов между парами антенно-приемных устройств, а текущее угловое положение объекта определяют путем решения следующей системы уравнений:
где i= 1,...,n - текущий номер космического аппарата; j=1,...,m - номер измерения фазовых сдвигов сигналов n космических аппаратов; n - общее число принимаемых космических аппаратов; m - общее число измерений фазовых сдвигов сигналов n космических аппаратов; кxij, кyij, kzij - направляющие косинусы векторов-направлений от объекта до i-го космического аппарата в j-й момент времени; ϕij- значение фазового сдвига сигнала i-гo космического аппарата в j-й момент времени; Xj, Yj, Zj - значения направляющих косинусов в j-й момент времени; λi- длина волны i-гo космического аппарата; ΔSi- систематическая погрешность измерения фазового сдвига сигнала i-гo космического аппарата, складывающаяся из целочисленной неоднозначности и аппаратурной составляющей систематической погрешности.
Поставленная задача также решается тем, что в способе угловой ориентации объекта по сигналам спутниковых радионавигационных систем, основанном на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные две или более антенны, расположенные параллельно одной или двум осям измеряемого объекта, измерении фазового сдвига между принятыми сигналами от каждого космического аппарата, согласно изобретению, в течение интервала времени измерения проводят m измерений фазовых сдвигов между парами антенно-приемных устройств, а начальное угловое положение объекта и его изменение по отношению к начальному определяют путем решения системы линейных уравнений, составленной по разностям разновременных измерений фазовых сдвигов сигналов космических аппаратов, принятых антеннами подвижного объекта, текущим значениям направляющих косинусов векторов-направлений от объекта до каждого из космических аппаратов в текущий момент времени и их приращениям по отношению к начальным значениям.
Сущность предлагаемого способа можно пояснить следующим образом.
При определении угловых координат объектов используют результаты измерений косинусов углов αi между вектором-базой и вектором-направлением на i-й НКА спутниковой радионавигационной системы (СРНС).
Фазовый сдвиг сигнала i-го НКА, принимаемого двумя пространственно разнесенными антеннами и косинус угла между вектором-базой и вектором-направлением на НКА, связаны выражением:
где i=1,...,n; n - общее число НКА, используемых для определения угловой ориентации объекта; λi- длина волны сигнала i-го НКА; Фi - фазовый сдвиг сигналов, принятых разнесенными антеннами; В - расстояние между антеннами.
Вычисление направляющих косинусов вектора-базы осуществляют на основе уравнения, полученного исходя из свойства скалярного произведения векторов в декартовой системе координат:
где x, y, z - известные координаты объекта в геоцентрической системе координат (ГЦСК); xci, yci, zci - координаты i-го спутника в ГЦСК, полученные из решения задачи размножения эфемерид НКА; cosβx, cosβy, cosβz- направляющие косинусы вектора-базы;
расстояние между объектом и i-м НКА, полученные на основе известных координат спутников и объекта.
Введем обозначения:
Коэффициенты kxi,yi,zi являются направляющими косинусами векторов-направлений от объекта до i-гo HKA,  направляющие косинусы вектора-базы, представляющие собой координаты вектора единичной длины по направлению, совпадающего с базой.
направляющие косинусы вектора-базы, представляющие собой координаты вектора единичной длины по направлению, совпадающего с базой.
С учетом принятых обозначений система уравнений (2) запишется следующим образом:
Систему уравнений (4) можно дополнить нелинейным уравнением связи между направляющими косинусами, которое имеет вид:
(cosβx)2+(cosβy)2+(cosβz)2 = 1. (5)
При определении углового положения объекта часто неизвестными являются не только направляющие косинусы вектора-базы, но и сама величина базы В. В связи с этим выражения (4) и (5) запишутся следующим образом:
X2 + Y2 + Z2 = B2, (7)
где X = B•cosβx, Y = B•cosβy, Z = B•cosβz.
Величины X, Y, Z являются геоцентрическими координатами фазового центра второй антенны относительно фазового центра первой антенны, взятой в качестве опорной.
В дальнейших материалах заявки рассматривается решение системы уравнений (6) и определение относительных координат второй антенны с последующим нахождением направляющих косинусов вектора-базы и значения базы В при помощи уравнения (7).
Как правило, при определении углового положения вектора-базы в целях повышения точности используют интерферометры с размером базы, существенно превышающим длину волны принимаемых сигналов. Так, например, длина волны НКА спутниковой радионавигационной системы ГЛОНАСС составляет около 20 см, величина базы может составлять несколько метров. Реальная фазоизмерительная аппаратура имеет диапазон однозначных измерений в пределах 180o или 360o, т. е. λ/2 или λ. Кроме того, при измерениях фазовых сдвигов возникают аппаратурные систематические погрешности, обусловленные разным временем прохождения принятых сигналов в антенно-приемных устройствах. В связи с этим выражение для полного фазового сдвига принятых сигналов можно записать в виде:
Фi= 2πki+Δϕci+ϕi, (8)
где ki - число целых циклов неоднозначности 360o в полной разности фаз сигнала i-го НКА; Δϕci- не зависящая от времени аппаратурная систематическая погрешность измерения фазового сдвига сигнала i-го НКА; ϕi- измеренное значение разности фаз сигналов i-го НКА, принятых двумя антеннами объекта.
С учетом наличия систематической погрешности и неоднозначности система уравнений (6) примет вид:
Система уравнений (9) записана для одного момента измерений. Запишем систему (9) для следующего момента времени, приняв во внимание, что с течением времени угловое положение объекта меняется:
где j= 1, . . .,m - номер измерения фазовых сдвигов сигналов n НКА; m - общее число разновременных измерений; Xj, Yj, Zj - текущие значения относительных координат второй антенны; kxij, kyij, kzij, ϕij, λij- текущие значения направляющих косинусов векторов-направлений от объекта до каждого из НКА, фазовых сдвигов и длин волн принятых сигналов соответственно.
Система (10) записана при условии, что измерения выполняются путем непрерывного слежения за фазовыми сдвигами принятых сигналов. Исходя из этого величина ki не зависит от номера измерения j и является начальной неоднозначностью для первого измерения фазового сдвига сигнала i-го НКА. Величина аппаратурной составляющей систематической погрешности фазовых измерений Δϕci, как было указано ранее, также не зависит от времени.
Объединим неизвестную целочисленную неоднозначность 2πki и аппаратурную составляющую систематической погрешности Δϕci и перенесем их в левую часть системы (10).
С учетом вышеприведенных упрощений система (10) запишется в виде:
Система уравнений (11) содержит n•m уравнений с (n+3)•m неизвестными. Неизвестными в системе (11) являются зависящие от времени относительные координаты второй антенны по отношению к первой - Xj, Yj, Zj (их общее число после проведения m измерений составит 3•m), а также систематические погрешности измерения фазовых сдвигов по каждому из спутников  которые также зависят от времени за счет изменения длины волны. Поскольку число неизвестных превышает число уравнений, система (11) является вырожденной и не может быть решена на практике.
которые также зависят от времени за счет изменения длины волны. Поскольку число неизвестных превышает число уравнений, система (11) является вырожденной и не может быть решена на практике.
Рассмотрим разности уравнений (11), взятых в различные моменты времени. Система уравнений для определения углового положения объекта в начальный момент времени j=l запишется в виде:
Тогда для моментов времени j>1 система уравнений примет вид:
Найдем разность систем уравнений (13) - (12), получим:
где X1, Y1, Z1 - начальные значения направляющих косинусов вектора базы объекта, определяющие его начальное угловое положение;  изменение направляющих косинусов по отношению к начальному на текущий момент измерений j; kxij, kyij, kzij - текущие значения направляющих косинусов векторов направлений объект - i-й НКА; Δkxij, Δkyij, Δkzij- приращения направляющих косинусов векторов направлений за время измерения.
изменение направляющих косинусов по отношению к начальному на текущий момент измерений j; kxij, kyij, kzij - текущие значения направляющих косинусов векторов направлений объект - i-й НКА; Δkxij, Δkyij, Δkzij- приращения направляющих косинусов векторов направлений за время измерения.
Данная система уравнений содержит n•(m-l) уравнений и (n+3)•m+3 неизвестных, т.е. является вырожденной и не может быть решена на практике.
При решении задачи в рассмотренных условиях можно считать, что длина волны принятых сигналов не меняется в процессе измерений. Частота принятых сигналов меняется с течением времени за счет эффекта Доплера, при этом относительное изменение частоты сигнала НКА за время нахождения его в зоне радиовидимости определяется соотношением:
где fdmax - максимальное значение доплеровского сдвига частоты принятых сигналов. Для неподвижного объекта эта величина не превышает 5000 Гц; f0i - значение несущей частоты сигнала i-го HКА.
Для спутниковой радионавигационной системы ГЛОНАСС значения несущих частот НКА располагаются в диапазоне 1602, 5625 - 1615,5 МГц, для оценки относительного изменения частоты можно принять f0i=1610 МГц. В системе GPS все НКА излучают сигналы с частотой 1575,42 МГц.
Таким образом относительное изменение частоты сигналов δf составляет 6,21•10-6 и 6,34•10-6 для систем ГЛОНАСС и GPS соответственно. Как видим, относительное изменение частоты сигнала за время пролета НКА невелико и практически не внесет изменения в длины волн принятых сигналов, поэтому можно считать λij= λi= const, не зависящей от j.
С учетом этого система (11) примет вид:
где  не зависящая от времени систематическая погрешность измерения фазового сдвига сигнала i-го НКА, складывающаяся из неоднозначности и аппаратурной составляющей погрешности, выраженная в единицах длины.
не зависящая от времени систематическая погрешность измерения фазового сдвига сигнала i-го НКА, складывающаяся из неоднозначности и аппаратурной составляющей погрешности, выраженная в единицах длины.
Полученная система уравнений (16) содержит n•m уравнений, а число неизвестных составляет 3•m+n. При n=4 число уравнений превышает число неизвестных при m ≥ 4, следовательно, система уравнений (16) не является вырожденной и может быть решена на практике. В результате ее решения находят текущую угловую ориентацию объекта Xj, Yj, Zj и n значений систематических погрешностей ΔS1, ΔS2,...,ΔSn для принимаемых сигналов НКА.
Система уравнений (16) имеет нарастающее во времени число оцениваемых параметров, что накладывает достаточно жесткие требования к быстродействию вычислительного процессора, выполняющего определение ориентации объекта. С целью упрощения вычислений, сокращения требований к вычислительному процессору и повышения быстродействия устройства предлагается 2-й вариант определения начального углового положения объекта и его изменения по отношению к начальному путем решения системы линейных уравнений (14), записанной с учетом неизменности во времени длин волн принимаемых сигналов λi. В результате этого система (14) примет вид:
Данная система содержит n•(m-1) уравнений с 3•m неизвестными и может быть однозначно разрешена по результатам 2-х разновременных измерений фазовых сдвигов принятых сигналов (одна разность) при числе принимаемых НКА n ≥ 6. В результате решения системы (17) находят исходные значения относительных координат второй антенны X1, Y1, Z1 и их приращения ΔX, ΔY, ΔZ, по которым определяют текущую ориентацию объекта Хj, Yj, Zj.
Моделирование и экспериментальные исследования алгоритма определения ориентации объекта путем решения системы уравнений (17) продемонстрировали его эффективность при определении ориентации как подвижных, так и неподвижных объектов для расстояния между антеннами до десяти метров.
На чертеже приведена структурная схема устройства, реализующего предложенный способ.
Устройство содержит два идентичных приемных канала, содержащих первую 1 и вторую 2 приемные антенны, подключенные ко входам первого 3 и второго 4 малошумящих усилителей (МШУ), последовательно включенные с ними первый 5 и второй 6 радиотракты, выходами соединенные с первыми входами первого 7 и второго 8 блоков цифровой обработки сигналов первого и второго каналов соответственно, формирователь опорных сигналов 9, выходами подключенный ко вторым входам радиотрактов 5, 6 и блоков цифровой обработки 7, 8, опорный генератор 10, первый выход которого подключен ко входу формирователя опорных сигналов 9, а второй выход - ко входу синхронизации вычислительного процессора 11, информационные входы которого соединены с выходами блоков цифровой обработки 7 и 8.
Сигналы n HKA принимаются двумя разнесенными антеннами 1 и 2, усиливаются малошумящими усилителями 3 и 4, преобразуются в сигналы промежуточной частоты и усиливаются радиотрактами 5 и 6 и затем поступают в блоки цифровой обработки сигналов 7 и 8, где происходит разделение сигналов каждого из спутников. Блоки цифровой обработки 7 и 8 реализованы по схеме оптимального корреляционного приемника, на выходе которых формируются отсчеты корреляционных интегралов I и Q для сигналов каждого из HKA, которые соответствуют результатам корреляционного перемножения принимаемых сигналов на синфазную и ортогональную составляющие опорного сигнала, формируемые генератором опорных сигналов 9 для каждого из спутников. На вычислительный процессор 11 возложены функции управления режимами работы приемника, включающими в себя поиск, захват сигналов по частоте и задержке, частотную и фазовую автоподстройку, синхронизацию по метке времени и границе бита служебной информации, прием и декодирование служебной информации и измерение радионавигационных параметров сигнала. К радионавигационным параметрам сигнала относятся его задержка, частота и фаза. Кроме управления режимами работы и измерения радионавигационных параметров вычислительный процессор 11 решает задачи вторичной обработки измеренных параметров, заключающиеся в определении координат HKA на момент проведения измерений (задача размножения эфемерид) на основе принятой служебной информации, вычисления координат места объекта и определения угловой ориентации антенной платформы. Также на вычислительный процессор 11 возложена задача прогноза сеансов навигационных определений и управления режимами работы блоков 7 и 8 для HKA, появляющихся или покидающих зону радиовидимости.
Координаты объекта определяются на основе измерений задержек сигналов, принятых с борта каждого НКА. Для проведения таких измерений сигналы каждого НКА модулируются псевдослучайными последовательностями (ПСП), называемыми дальномерным кодом. Путем сравнения ПСП сигнала, сформированного блоком 9, с ПСП принятого сигнала происходит определение времени задержки принятого сигнала. Дальность до НКА, излучившего сигнал, получают путем умножения времени задержки на скорость распространения радиосигналов. Следует отметить, что вследствие несовпадения бортового времени объекта с опорным временем спутниковой радионавигационной системы эта дальность не соответствует истиной и поэтому получила название псевдодальности. Координаты объекта на основе измеренных значений псевдодальностей получают путем решения системы уравнений вида:
где i=1...n - текущий номер сигнала, принимаемого НКА; n - число НКА, по которым выполняются измерения псевдодальностей; xci, yci, zci - координаты i-го НКА в геоцентрической системе координат, вычисленные на момент проведения измерений путем решения задачи размножения эфемерид; X, Y, Z - неизвестные координаты объекта в геоцентрической системе координат; Ri - измеренные величины псевдодальностей; с - скорость распространения радиосигналов в вакууме, равная 3•108 м/с; τ0- неизвестное расхождение шкалы времени объекта с системным временем спутниковой радионавигационной системы.
Система уравнений (18) содержит четыре неизвестных и для ее однозначного решения необходимо принять сигналы не менее четырех НКА. Способы решения таких систем рассмотрены, например, в [3, с. 230-231].
Для определения угловой ориентации объекта вычислительный процессор 11 производит оптимальную оценку начальных фаз сигналов, принятых антенно-приемными устройствами на основе значений корреляционных интегралов I и Q, накопленных на измерительном интервале по формуле:
где Ф - начальная фаза принятого сигнала в диапазоне однозначных измерений (-π, +π).
После оценки начальных фаз сигналов, принятых каждой из антенн, вычисляют значения фазовых сдвигов сигналов, принятых двумя пространственно разнесенными антеннами ϕi по каждому из спутников, которые в дальнейшем используются для определения углового положения осей измеряемого объекта путем решения вышеприведенных систем уравнений (16) или (17).
Вычислительный процессор 11 в связи с большим объемом вычислений и сложностью управляющих алгоритмов и программ необходимо реализовать, например, на основе микропроцессора Intel 80386 по типовой структуре, описанной в [4, стр. 13].
Литература
1. Патент РФ 2122217. Опубл. 1998. Бюл. 32.
2. Патент РФ 2105319. Опубл. 1998. Бюл. 5.
3. B. C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Сетевые спутниковые радионавигационные системы. / Под ред. B.C. Шебшаевича. М.: Радио и связь. 1993.
4. Брамм П., Брамм Д. Микропроцессор 80386 и его программирование: Пер. с англ. - М.: Мир, 1990, - 448 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2215299C2 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 1995 |
|
RU2105319C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2008 |
|
RU2379700C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2010 |
|
RU2446410C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2013 |
|
RU2529649C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ ОДНОЧАСТОТНОГО ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ | 2002 |
|
RU2208809C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА В СРЕДЕ ГЛОБАЛЬНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2015 |
|
RU2578671C1 |
| СПОСОБ КОНТРОЛЯ ГЕОМЕТРИИ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2019 |
|
RU2713633C1 |
Изобретение относится к спутниковой навигации и может быть использовано для определения пространственной ориентации подвижных объектов интерферометрическим методом при размере базы интерферометра до нескольких метров. Техническим результатом является нахождение начального и текущего углового положения подвижного объекта без принудительного изменения ориентации векторов-баз, на концах которых расположены антенны. Технический результат в первом варианте достигается тем, что осуществляется определение текущей угловой ориентации объекта путем решения системы уравнений, составленной по m измерениям фазовых сдвигов сигналов n космических аппаратов спутниковой радионавигационной системы (n≥4, m≥4). Во втором варианте технический результат достигается тем, что определение начальной угловой ориентации объекта и ее изменение по отношению к начальному осуществляется по разностям равновременных измерений фазовых сдвигов сигналов n космических аппаратов (n≥6), текущим значениям направляющих косинусов векторов-направлений от объекта до каждого из космических аппаратов и их приращениям за время измерения. 2 с.п.ф-лы, 1 ил.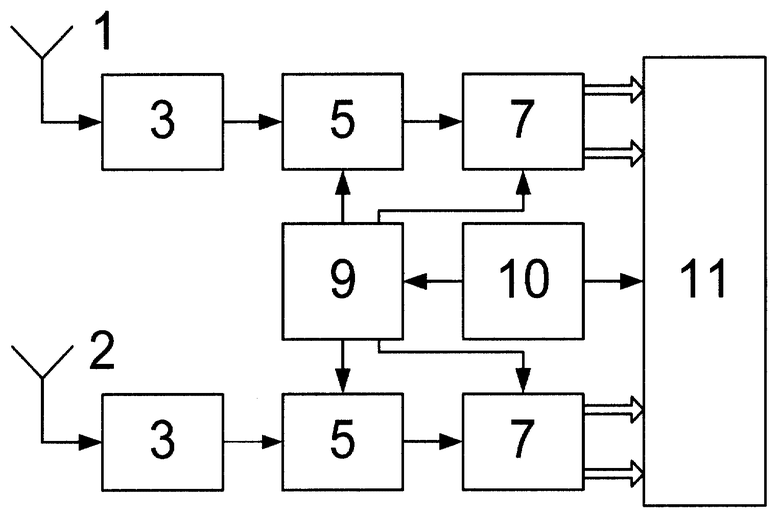

где i= 1, . . . , n - текущий номер космического аппарата;
j= 1, . . . , m - номер измерения фазовых сдвигов сигналов n космических аппаратов;
n - общее число принимаемых космических аппаратов;
m - общее число измерений фазовых сдвигов сигналов n космических аппаратов;
kxij, kyij, kzij - направляющие косинусы векторов-направлений от объекта до i-го космического аппарата в j-й момент времени;
ϕij - значение фазового сдвига сигнала i-го космического аппарата в j-й момент времени;
Xj, Yj, Zj - значения направляющих косинусов в j-й момент времени;
λi - длина волны i-го космического аппарата;
ΔSi - систематическая погрешность измерения фазового сдвига сигнала i-го космического аппарата, складывающаяся из целочисленной неоднозначности и аппаратурной составляющей систематической погрешности.
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 1995 |
|
RU2105319C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| СПОСОБ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ ПОЛНОЙ РАЗНОСТИ ФАЗ ПРИ ИНТЕРФЕРОМЕТРИЧЕСКИХ ИЗМЕРЕНИЯХ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1996 |
|
RU2116655C1 |
| US 5296861 A, 22.03.1994 | |||
| US 4161730 A, 17.07.1979. | |||
