ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к роботу-пылесосу, распознающему свое текущее местоположение путем использования камеры в процессе перемещения по рабочей зоне, и, более точно, к способу распознавания меток для определения местоположения исходя из изображения, зафиксированного камерой, и к роботу-пылесосу, использующему данный способ.
2. Описание известного уровня техники
Робот-пылесос, который распознает свое текущее местоположение путем использования камеры и перемещается по рабочей зоне на основе информации о распознанном местоположении для выполнения работы по чистке, как правило, имеет метки для определения местоположения, расположенные в некотором месте, которые должны быть зафиксированы камерой. Метки для определения местоположения, как правило, включают в себя две метки, которые расположены на потолке рабочей зоны на некотором расстоянии друг от друга. Камера расположена вертикально в корпусе робота-пылесоса для фиксации меток для определения местоположения, расположенных на потолке.
Нижеизложенное представляет собой описание способа распознавания меток для определения местоположения, при котором управляющее устройство робота-пылесоса распознает метки для определения местоположения на изображении, которое получают путем фиксации изображения потолка с расположенными на нем метками для определения местоположения с использованием камеры.
Сначала робот-пылесос получает объектные метки (object marks) из зафиксированного изображения, чтобы определить, являются ли они метками для определения местоположения или нет.
Далее определяют, идентичны ли формы объектных меток формам меток для определения местоположения.
Если будет определено, что формы являются идентичными, то затем также определяют, идентично ли расстояние между объектными метками расстоянию между двумя метками для определения местоположения.
Если будет определено, что расстояния являются идентичными, объектные метки идентифицируются как метки для определения местоположения, которые робот-пылесос должен распознать. Соответственно, управляющее устройство робота-пылесоса сравнивает координаты распознанных в данный момент меток для определения местоположения с координатами ранее распознанных меток для определения местоположения, чтобы определить текущее местоположение робота-пылесоса, и, соответственно, выдает команду на выполнение работы, передаваемую роботу-пылесосу.
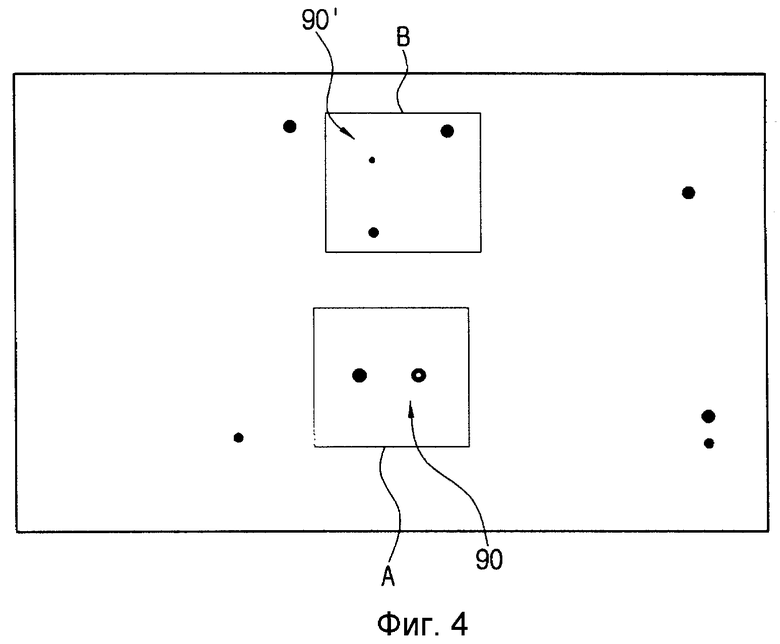
Однако при использовании обычного способа распознавания меток для определения местоположения, проиллюстрированного на фиг.1, у робота-пылесоса, подобного описанному выше, часто возникают ситуации, когда робот-пылесос ошибочно идентифицирует структурные элементы 91а-91g как метки для определения местоположения в том случае, когда структурные элементы 91а-91g похожи на метки 90 для определения местоположения, искусственно нанесенные на потолок рабочей зоны, как показано на фиг.1. Если при распознавании меток 90 для определения местоположения возникает ошибка, существует проблема, состоящая в том, что ошибка распознавания приводит к ошибке при выполнении операции чистки и последующих направлениях перемещения, задаваемых для робота-пылесоса.
Соответственно, существует потребность в способе, при котором робот-пылесос будет правильно распознавать метки для определения местоположения, даже если на потолке рабочей зоны будут иметься структурные элементы с формами, аналогичными формам меток для определения местоположения, расположенных на потолке.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение было создано для решения вышеуказанной проблемы, характерной для известного уровня техники. Соответственно, в основу настоящего изобретения положена задача разработать способ, при котором робот-пылесос точно распознает метки для определения местоположения, даже если на потолке рабочей зоны имеются структурные элементы, аналогичные меткам для определения местоположения.
Кроме того, другой задачей настоящего изобретения является разработка робота-пылесоса, использующего способ распознавания меток для определения местоположения.
Вышеуказанные задачи настоящего изобретения достигаются путем разработки способа распознавания меток для определения местоположения, который используется роботом-пылесосом, содержащим камеру, фиксирующую зону, на которой расположены метки для определения местоположения, управляющее устройство, распознающее текущее местоположение на основе изображения, зафиксированного камерой, и хранимых контрольных меток для определения местоположения, и привод, приводимый в действие в соответствии с сигналом от управляющего устройства. При использовании способа распознавания меток для определения местоположения робота-пылесоса, в котором управляющее устройство распознает метки для определения местоположения на изображении, способ включает в себя следующие операции: получение из изображения объектных меток, которые должны быть сравнены с контрольными метками для определения местоположения, определение того, являются ли формы объектных меток идентичными формам контрольных меток для определения местоположения, определение того, является ли расстояние между объектными метками идентичным расстоянию между контрольными метками для определения местоположения, если будет определено, что формы идентичны, определение того, является ли изображение, окружающее объектные метки, идентичным изображению, окружающему контрольные метки для определения местоположения, если будет определено, что расстояния идентичны, и идентификацию объектных меток как меток для определения местоположения, если будет определено, что окружающие изображения идентичны.
Метки для определения местоположения включают в себя две метки, расположенные на некотором расстоянии друг от друга.
При этом предпочтительно одна из двух меток представляет собой первую метку, которой придана форма черного круга, и другая представляет собой вторую метку, которой придана форма черного круга, имеющего такой же диаметр, как и диаметр первой метки, или диаметр, который меньше диаметра первой метки. Также предпочтительно, чтобы одна из двух меток представляла собой первую метку, которой придана форма черного круга, и другая представляла собой вторую метку, которой придана форма черного тороида, имеющего белый центр.
Кроме того, при использовании способа распознавания меток для определения местоположения робота-пылесоса согласно настоящему изобретению метки для определения местоположения расположены на потолке рабочей зоны, а камера расположена в корпусе робота-пылесоса вертикально по отношению к направлению перемещения робота-пылесоса для "фиксации" потолка рабочей зоны.
Предпочтительно, чтобы метки для определения местоположения включали в себя две метки, расположенные на некотором расстоянии друг от друга.
Другая задача настоящего изобретения достигается путем разработки робота-пылесоса, выполняющего работу при беспроводной связи с внешним устройством. Робот-пылесос содержит привод, предназначенный для приведения в движение множества колес, верхнюю камеру для фиксации потолка рабочей зоны, на котором расположены метки для определения местоположения, и управляющее устройство, распознающее метки для определения местоположения на изображении, зафиксированном камерой, путем обращения к формам хранимых контрольных меток для определения местоположения, расстоянию между ними и изображению, окружающему их, чтобы тем самым распознать текущее местоположение робота-пылесоса. Управляющее устройство приводит в действие привод, используя информацию о текущем местоположении, чтобы выполнить команду на выполнение работы.
В соответствии со способом распознавания меток для определения местоположения робота-пылесоса робот-пылесос может распознавать метки для определения местоположения точно даже в том случае, если на потолке рабочей зоны существуют структурные элементы, аналогичные меткам для определения местоположения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанные особенности и другие признаки настоящего изобретения станут более очевидными при рассмотрении описания предпочтительного варианта осуществления настоящего изобретения со ссылкой на сопровождающие чертежи, в которых:
фиг.1 представляет собой вид в плане, показывающий изображение потолка, зафиксированное направленной вверх камерой, смонтированной в робот-пылесос;
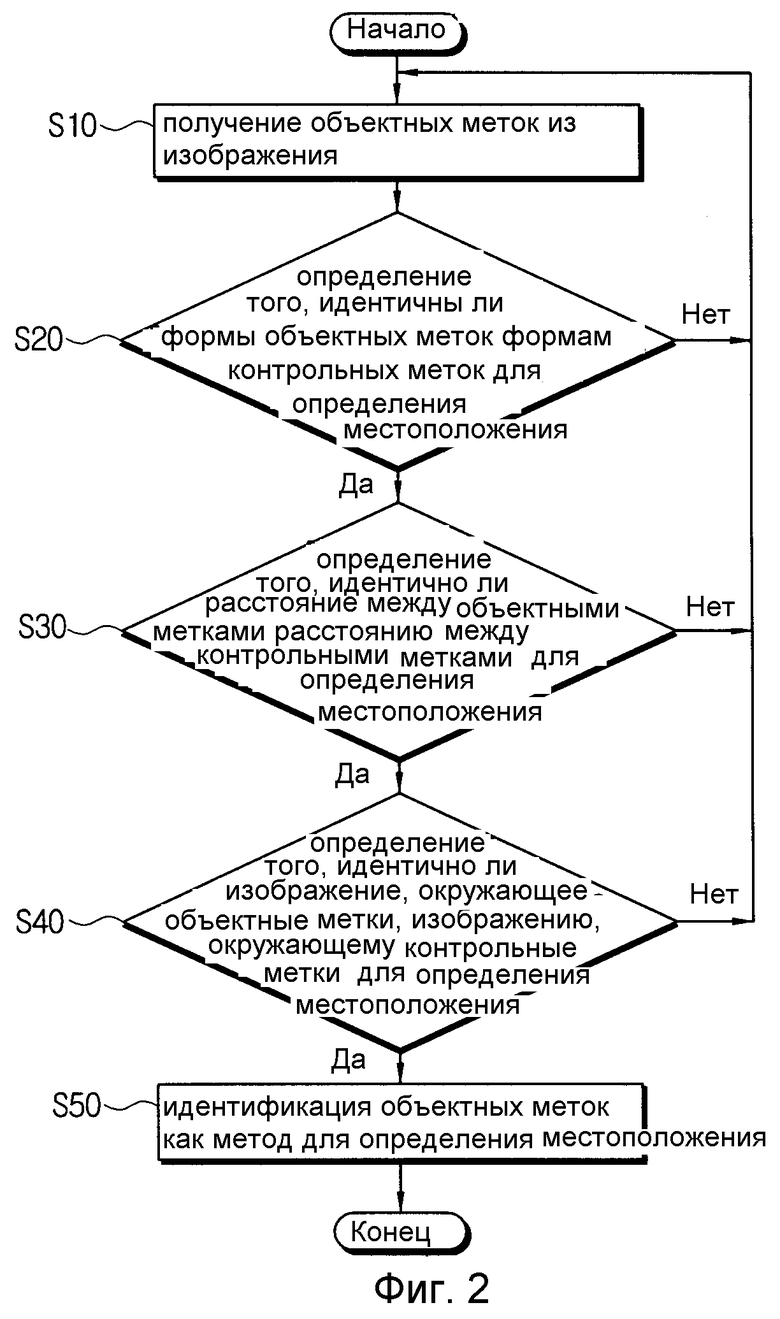
фиг.2 представляет собой блок-схему, иллюстрирующую способ распознавания меток для определения местоположения робота-пылесоса в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
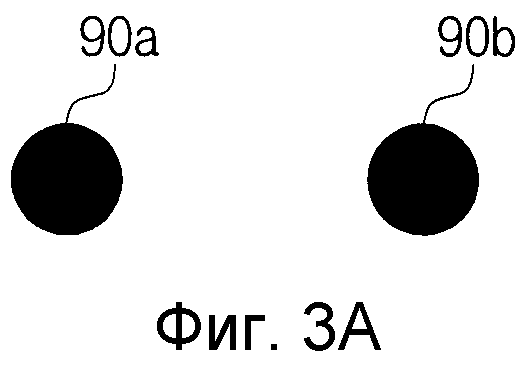
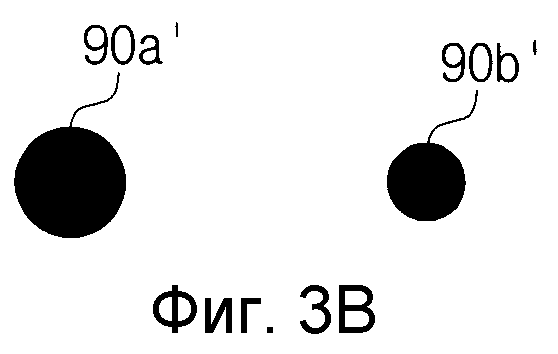
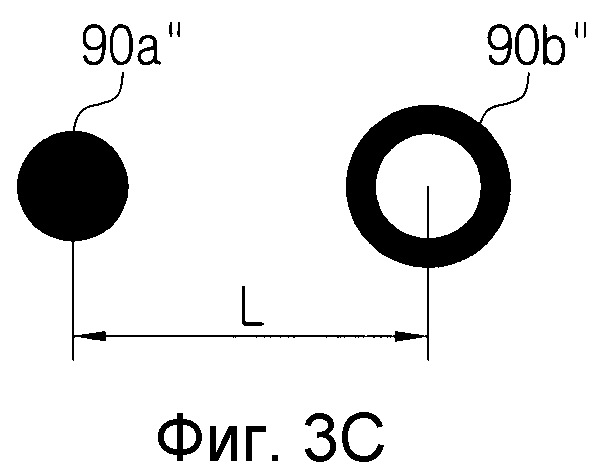
фиг.3А-3С представляют собой изображения, показывающие альтернативные примеры меток для определения местоположения, подлежащих распознаванию в соответствии со способом распознавания меток для определения местоположения по настоящему изобретению;
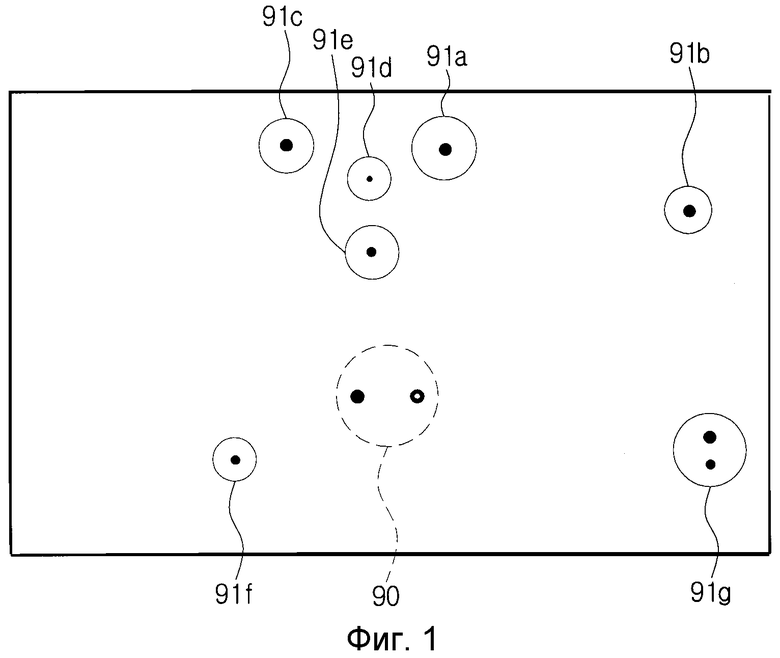
фиг.4 представляет собой вид в плане, показывающий изображение, окружающее метки для определения местоположения, используемое в способе распознавания меток для определения местоположения робота-пылесоса, который проиллюстрирован на фиг.2;
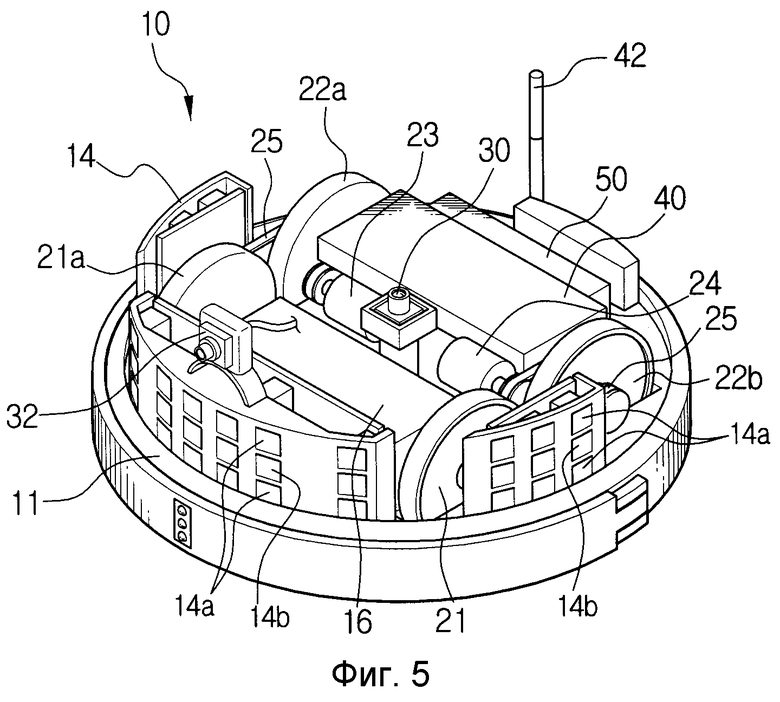
фиг.5 представляет собой перспективное изображение, показывающее незакрытый корпус робота-пылесоса; и
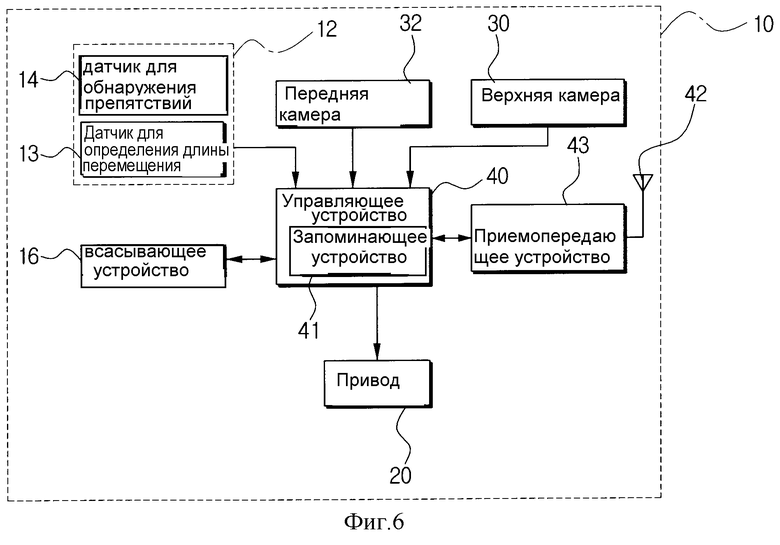
фиг.6 представляет собой блок-схему, показывающую элементы робота-пылесоса, изображенного на фиг.5.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Далее со ссылкой на сопровождающие чертежи будет описан способ распознавания меток для определения местоположения, предназначенный для робота-пылесоса, согласно предпочтительному варианту осуществления настоящего изобретения.
Робот-пылесос, использующее способ распознавания меток для определения местоположения согласно настоящему изобретению, содержит направленную вверх камеру, предназначенную для фиксации изображения местоположения меток, расположенных в заданном месте, удаленном от робота-пылесоса, чтобы обеспечить запись изображения, управляющее устройство, предназначенное для распознавания меток для определения местоположения на изображении, созданном направленной вверх камерой, и привод, приводимый в действие управляющим устройством для выполнения заданной команды. Управляющее устройство хранит данные о контрольных метках для определения местоположения для распознавания меток для определения местоположения. Хранимые данные о контрольных метках для определения местоположения включают в себя данные о формах многочисленных меток для определения местоположения и расстоянии между метками для определения местоположения. Управляющее устройство также фиксирует заранее заданную зону места, на котором расположены метки для определения местоположения, путем использования направленной вверх камеры, чтобы сохранить в памяти изображение, окружающее метки для определения местоположения. Метки для определения местоположения служат в качестве базы отсчета и используются для того, чтобы создать для робота-пылесоса возможность определения его текущего местоположения исходя из изображения, зафиксированного направленной вверх камерой. Меткам для определения местоположения придана такая форма, что могут быть рассчитаны изменения длины смещения и определены изменения направления смещения меток для определения местоположения. В качестве примеров меток для определения местоположения приведены две метки, которые расположены на потолке рабочей зоны отдельно друг от друга и находятся на заранее заданном расстоянии друг от друга. На фиг.3А-3С схематично проиллюстрированы различные варианты осуществления меток для определения местоположения. Один вариант осуществления (фиг.3А) показывает первую метку 90а и вторую метку 90b, при этом обеим меткам придана форма черных кругов, и они имеют одинаковый диаметр. Другой вариант осуществления (фиг.3В) показывает первую метку 90а’, которой придана форма черного круга, и вторую метку 90b’, которой придана форма черного круга подобно первой метке 90а’, но вторая метка имеет меньший диаметр по сравнению с диаметром первой метки 90а’. Еще один вариант осуществления (фиг.3С) показывает первую метку 90а" с формой круга и вторую метку 90b", которой придана форма черного тороида. Если метки 90 для определения местоположения расположены на потолке рабочей зоны, камера должна быть расположена в корпусе робота-пылесоса и должна быть направлена вверх по отношению к направлению перемещения робота с тем, чтобы она могла фиксировать изображения потолка.
Способ, при котором вышеописанный робот-пылесос распознает метки для определения местоположения на изображении, созданном камерой, будет описан более подробно со ссылкой на операции, показанные на фиг.2.
Сначала робот-пылесос фиксирует изображение с помощью направленной вверх камеры и запоминает зафиксированную информацию, относящуюся к объектным меткам, подлежащим сравнению с хранимыми контрольными метками для определения местоположения, как показано на фиг.2 (S10). Объектные метки имеют изображения, которые отличают их от изображения потолка, включая изображение меток 90 для определения местоположения и изображения структурных элементов 91а-91g, аналогичных меткам 90 для определения местоположения.
Далее определяют, аналогичны ли формы объектных меток формам хранимых контрольных меток для определения местоположения (S20). То есть, если метки 90 для определения местоположения имеют формы, подобные показанным на фиг.3С, определяют, является ли первая метка 90а" черным кругом, и затем определяют, является ли вторая метка 90b" черным тороидом.
Если будет определено, что формы объектных меток идентичны формам контрольных меток для определения местоположения, то затем определяют, идентично ли расстояние между объектными метками расстоянию L между первой и второй метками 90а" и 90b" (фиг.3С), то есть расстоянию между контрольными метками для определения местоположения (S30). Предпочтительным способом определения расстояния L является измерение длины [отрезка] между соответствующими центральными точками первой и второй меток 90а" и 90b".
Далее, если будет определено, что расстояние между объектными метками идентично расстоянию между контрольными метками для определения местоположения, определяют, идентично ли изображение, окружающее объектную метку, изображению, окружающему контрольные метки для определения местоположения (S40). Изображение, окружающее объектные метки, означает изображение В заранее заданной зоны, которая окружает объектные метки 90’, как показано на фиг.4. Кроме того, изображение, окружающее метки для определения местоположения, означает изображение А заранее заданной зоны, которая окружает метки 90 для определения местоположения, как показано на фиг.4. В данном случае площадь изображения В, окружающего объектные метки 90’, идентична площади изображения А, окружающего метки 90 для определения местоположения. Кроме того, изображение А, окружающее метки для определения местоположения, было сохранено в памяти управляющего устройства после фотографирования его камерой. Даже в том случае, когда будет определено, что форма объектных меток и расстояние между ними идентичны форме контрольных меток для определения местоположения и расстоянию между контрольными метками для определения местоположения, если изображение В, окружающее объектные метки 90’, не будет идентично изображению А, окружающему метки для определения местоположения, объектные метки 90’ не могут быть идентифицированы как метки для определения местоположения. Соответственно, не возникает никакой ошибки, которая имеет место в том случае, если управляющее устройство ошибочно идентифицирует другие структурные элементы потолка, отличные от меток для определения местоположения, как метки для определения местоположения. Кроме того, в качестве способа сравнения изображения В, окружающего объектные метки, с изображением А, окружающим метки для определения местоположения, может быть использован любой из хорошо известных способов сравнения изображений.
Если изображение В, окружающее объектные метки, идентично изображению А, окружающему метки для определения местоположения, управляющее устройство идентифицирует объектные метки как метки для определения местоположения и получает их координаты (S50). После этого управляющее устройство сравнивает вновь полученные координаты с ранее зафиксированными координатами меток для определения местоположения, тем самым распознавая текущее местоположение робота-пылесоса.
При использовании метода распознавания меток для определения местоположения робота-пылесоса, описанного выше, возможность ошибки, при которой робот-пылесос ошибочно идентифицирует структурные элементы потолка как метки для определения местоположения, по существу устраняется.
Фиг.5 и 6 представляют собой соответственно перспективное изображение и блок-схему, показывающие робот-пылесос со снятой крышкой, при этом данный робот-пылесос использует способ распознавания меток для определения местоположения в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Как показано на фиг.5 и 6, робот-пылесос 10 содержит корпус 11, всасывающее устройство 16, привод 20, направленную вверх камеру 30, переднюю камеру 32, управляющее устройство 40, приемопередающее устройство 43, сенсорное устройство 12 и перезаряжаемую аккумуляторную батарею 50.
Всасывающее устройство 16 расположено в корпусе 11 напротив поверхности, подвергаемой чистке, так, чтобы обеспечить сбор пыли с этой поверхности за счет всасывания воздуха. Всасывающее устройство 16 может быть реализовано путем использования одного из различных хорошо известных способов. Например, всасывающее устройство 16 может содержать электродвигатель для создания всасывающей силы (не показан) и пылесборник для сбора пыли, которая всасывается внутрь через всасывающее отверстие или всасывающую трубу, расположенную напротив поверхности, подвергаемой чистке, за счет приведения в действие электродвигателя, предназначенного для создания всасывающей силы.
Привод 20 содержит два передних колеса 21а, 21b, расположенных у обеих передних сторон, два задних колеса 22а, 22b, расположенных у обеих задних сторон, электродвигатели 23, 24, предназначенные для того, чтобы соответственно приводить во вращение два задних колеса 22а, 22b, и синхронные ремни 25, предназначенные для передачи движущих сил от задних колес 22а, 22b передним колесам 21а, 21b. Привод 20 обеспечивает приведение во вращение соответствующих электродвигателей 23, 24 независимо друг от друга в прямом направлении или в обратном направлении в соответствии с управляющим сигналом, полученным от управляющего устройства 40. Направление движения определяется путем управления соответствующей частотой вращения электродвигателей 23, 24, выраженной в оборотах в минуту, при этом электродвигатели приводятся во вращение или одновременно, или в противоположных направлениях в зависимости от заданного направления перемещения робота-пылесоса 10.
Передняя камера 32 расположена в корпусе 11 и используется для фиксации изображения объектов, находящихся впереди и передачи данного изображения управляющему устройству 40.
Направленная вверх камера 30 расположена в корпусе 11 и предназначена для фиксации меток 90 для определения местоположения (фиг.4), расположенных на потолке зоны, подлежащей чистке, и для передачи изображения управляющему устройству 40. В качестве передней и направленной вверх камер 32, 30, как правило, используется телекамера на приборах с зарядовой связью.
Сенсорное устройство 12 включает в себя один или более датчиков 14 для обнаружения препятствия, расположенных вдоль наружной окружной периферии корпуса 11 на заранее заданных расстояниях друг от друга и предназначенных для передачи сигнала наружу и приема отраженного сигнала, и датчик 13 для определения длины перемещения, предназначенный для измерения длины перемещения.
Датчики 14 для обнаружения препятствий имеют элементы 14а для излучения инфракрасных лучей, предназначенные для излучения инфракрасных лучей, и светопринимающие элементы 14b, предназначенные для приема отраженного света. Множество элементов 14а для излучения инфракрасных лучей и светопринимающих элементов 14b расположены в виде параллельных вертикально проходящих рядов вдоль наружной окружной периферии корпуса 11. В альтернативном варианте в датчиках 14 для обнаружения препятствий может быть использован ультразвуковой датчик, предназначенный для излучения ультразвуковых волн и приема отраженных ультразвуковых волн. Датчики 14 для обнаружения препятствий используются для определения расстояния до препятствия или стены.
Датчик 13 для определения длины перемещения может представлять собой датчик для обнаружения вращения, предназначенный для определения частоты вращения колес 21а, 21b, 22а, 22b, выраженной в оборотах в минуту. Например, в датчике для определения частоты вращения используется кодовый датчик для определения частоты вращения электродвигателей 23, 24, выраженной в оборотах в минуту.
Приемопередающее устройство 43 выдает информационные сигналы с помощью антенны 42 и передает сигнал, полученный посредством антенны 42, управляющему устройству 40.
Перезаряжаемая аккумуляторная батарея 50 расположена в корпусе 11 и предназначена для подвода к электродвигателям 23, 24 и управляющему устройству 40 питания, необходимого для приведения в действие робота-пылесоса 10 и для других операций.
Управляющее устройство 40 обрабатывает сигнал, который получен посредством приемопередающего устройства 43 и управляет соответствующими компонентами. Если в конструкцию включено клавишное устройство ввода, имеющее множество клавиш для управления функционированием элементов, предусмотренных в корпусе 11, управляющее устройство 40 обрабатывает сигналы от клавиш, введенные посредством клавишного устройства ввода.
На изображении, зафиксированном направленной вверх камерой 30, управляющее устройство 40 распознает метки 90 для определения местоположения (фиг.4), расположенные на потолке зоны, подлежащей чистке, при этом указанные метки 90 используются в качестве базы отсчета для определения текущего местоположения робота-пылесоса, и затем управляющее устройство 40 рассчитывает координаты указанных меток. После этого управляющее устройство 40 определяет отклонения в направлении перемещения и длине смещения меток 90 для определения местоположения на основе изображения, зафиксированного направленной вверх камерой 30, чтобы тем самым рассчитать координаты текущего положения робота-пылесоса 10. Кроме того, управляющее устройство 40 управляет соответствующими элементами, такими как привод 20, в соответствии с информацией о рассчитанных координатах текущего местоположения с целью выполнения рабочей команды.
Основная информация об изображении контрольных меток для определения местоположения хранится в устройстве 41 хранения данных (фиг.6) управляющего устройства 40, чтобы управляющее устройство 40 могло распознать метки 90 для определения местоположения на изображении, сфотографированном направленной вверх камерой 30.
Далее будет описан способ работы, с помощью которого управляющее устройство распознает текущее местоположение робота-пылесоса 10. Сначала управляющее устройство 40 выдает команду направленной вверх камере 30 на фиксацию изображения потолка над зоной, подлежащей чистке, в результате чего создается верхнее изображение. После этого управляющее устройство 40 обращается к данным о контрольных метках для определения местоположения, хранящимся в устройстве 41 хранения данных, чтобы тем самым распознать метки 90 для определения местоположения на основе изображения, зафиксированного направленной вверх камерой.
Способ, посредством которого управляющее устройство 40 распознает метки 90 для определения местоположения на изображении, зафиксированном направленной вверх камерой, будет описан более подробно. Сначала управляющее устройство 40 получает из изображения, зафиксированного направленной вверх камерой, объектные метки, подлежащие сравнению с контрольными метками для определения местоположения. Затем управляющее устройство 40 определяет, идентичны ли формы объектных меток формам контрольных меток для определения местоположения. Если будет определено, что формы являются идентичными, управляющее устройство 40 определяет, идентично ли расстояние между объектными метками расстоянию между контрольными метками для определения местоположения. Если будет определено, что расстояния являются идентичными, управляющее устройство 40 определяет, идентично ли изображение В, окружающее объектные метки, изображению А, окружающему контрольные метки для определения местоположения. Если также будет определено, что окружающее изображение В идентично окружающему изображению А, управляющее устройство 40 идентифицирует объектные метки как метки 90 для определения местоположения. Поскольку в том случае, когда управляющее устройство 40 распознает метки 90 для определения местоположения на изображении, зафиксированном направленной вверх камерой, оно учитывает данные сравнения изображения А, окружающего метки 90 для определения местоположения, не возникает никакой ошибки, связанной с тем, что управляющее устройство 40 ошибочно идентифицирует аналогичный структурный элемент потолка, находящийся в пределах верхнего изображения, как метки 90 для определения местоположения.
После распознавания меток 90 для определения местоположения на изображении, зафиксированном направленной вверх камерой, посредством описанного выше способа управляющее устройство 40 рассчитывает координаты и определяет направленную ориентацию распознанных меток 90 для определения местоположения. После этого управляющее устройство 40 создает возможность перемещения робота-пылесоса 10 путем приведения в действие привода 20 и затем обеспечивает фиксацию потолка путем использования камеры для создания нового изображения, зафиксированного направленной вверх камерой. На новом изображении, зафиксированном направленной вверх камерой, управляющее устройство 40 распознает метки 90 для определения местоположения и определяет их координаты и направление. Далее путем расчета изменений координат и направленной ориентации меток 90 для определения местоположения управляющее устройство 40 определяет текущее местоположение робота-пылесоса 10. Имея информацию о текущем местоположении, робот-пылесос 10 выполняет команду на выполнение работы в пределах зоны, подлежащей чистке.
В соответствии со способом распознавания меток для определения местоположения робота-пылесоса, описанным выше, робот-пылесос может распознавать метки для определения местоположения точно на изображении, зафиксированном направленной вверх камерой, даже в том случае, если на потолке рабочей зоны существует структура, аналогичная меткам для определения местоположения. Соответственно, в процессе работы и перемещения робота-пылесоса не будет возникать никаких ошибок.
Вышеприведенные варианты осуществления и преимущества представлены просто в качестве примера, и их не следует рассматривать как ограничивающие объем настоящего изобретения. Идеи настоящего изобретения могут быть легко применены для других типов устройств. Предусмотрено, что описание настоящего изобретения является иллюстративным и не предназначено для ограничения объема притязаний формулы изобретения. Многочисленные альтернативы, модификации и варианты очевидны для специалистов в данной области техники. В формуле изобретения части формулы изобретения "средство плюс функция" предназначены для того, чтобы защищать конструкции, описанные здесь как выполняющие указанную функцию, и не только структурные эквиваленты, но также и эквивалентные конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС И СИСТЕМА РОБОТА-ПЫЛЕСОСА | 2003 |
|
RU2262878C2 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| РОБОТ-ПЫЛЕСОС | 2013 |
|
RU2560319C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2719222C1 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2674707C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |
| РОБОТ-ПЫЛЕСОС | 2015 |
|
RU2665457C1 |
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
Способ и робот-пылесос могут быть использованы для распознавания меток при определении местоположения робота-пылесоса, выполняющего работу при беспроводной связи с внешним устройством, и позволяют точно определять местоположение робота-пылесоса даже при наличии на потолке рабочей зоны структурных элементов, аналогичных меткам. Робот-пылесос содержит привод, предназначенный для приведения в движение множества колес, направленную вверх камеру для фиксации потолка над подлежащей чистке зоной, на котором расположены метки для определения местоположения, и управляющее устройство, предназначенное для распознавания меток для определения местоположения на изображении, зафиксированном направленной вверх камерой, путем обращения к формам хранимых контрольных меток для определения местоположения, расстоянию между ними и изображению, окружающему их, чтобы распознать текущее местоположение робота-пылесоса. Управляющее устройство выполнено с возможностью управления приводом, используя информацию о текущем местоположении, чтобы выполнить команду на выполнение работы. Согласно способу осуществляют получение из изображения объектных меток, которые должны быть сравнены с хранимыми контрольными метками для определения местоположения, определяют, являются ли формы объектных меток идентичными формам хранимых контрольных меток для определения местоположения, определяют, является ли расстояние между объектными метками идентичным расстоянию между контрольными метками для определения местоположения, если будет определено, что формы идентичны, определяют, является ли изображение, окружающее объектные метки, идентичным изображению, окружающему контрольные метки для определения местоположения, если будет определено, что расстояния идентичны, и осуществляют идентификацию объектных меток как меток для определения местоположения, если будет определено, что окружающие изображения идентичны. 2 с. и 11 з.п. ф-лы, 6 ил.
осуществляют получение из изображения объектных меток, которые должны быть сравнены с хранимыми контрольными метками для определения местоположения;
определяют, являются ли формы объектных меток идентичными формам хранимых контрольных меток для определения местоположения;
определяют, является ли расстояние между объектными метками идентичным расстоянию между контрольными метками для определения местоположения, если будет определено, что формы идентичны;
определяют, является ли изображение, окружающее объектные метки, идентичным изображению, окружающему контрольные метки для определения местоположения, если будет определено, что расстояния идентичны, и
осуществляют идентификацию объектных меток как меток для определения местоположения, если будет определено, что окружающие изображения идентичны.
привод, предназначенный для приведения в движение множества колес;
направленную вверх камеру для фиксации потолка над подлежащей чистке зоной, на котором расположены метки для определения местоположения, и
управляющее устройство, предназначенное для распознавания меток для определения местоположения на изображении, зафиксированном направленной вверх камерой, путем обращения к формам хранимых контрольных меток для определения местоположения, расстоянию между ними и изображению, окружающему их, чтобы распознать текущее местоположение робота-пылесоса, при этом управляющее устройство выполнено с возможностью управления приводом, используя информацию о текущем местоположении, чтобы выполнить команду на выполнение работы.
| DE 10145150 A1, 29.05.2002 | |||
| СПОСОБ ДООПЕРАЦИОННОГО ПРОГНОЗИРОВАНИЯ МАКУЛЯРНОГО ОТЕКА У БОЛЬНЫХ САХАРНЫМ ДИАБЕТОМ В МИКРОХИРУРГИИ КАТАРАКТЫ | 2007 |
|
RU2344748C1 |
| DE 10164278 A1, 31.10.2002 | |||
| Устройство для контроля блоков управления | 1981 |
|
SU1003088A1 |
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

