Предпосылки изобретения
1. Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к роботу-пылесосу, который имеет подзаряжаемую батарею и внешнее зарядное устройство для подзарядки подзаряжаемой батареи, и более конкретно относится к системе робота-пылесоса, которая эффективно осуществляет операцию стыковки с внешним зарядным устройством, и к способу стыковки робота-пылесоса с внешним зарядным устройством.
Уровень техники
Обычно робот-пылесос не только всасывает пыль и другие посторонние вещества с очищаемой поверхности, автоматически перемещаясь по району, который требуется очистить, без необходимости вмешательства пользователя, но также работает как устройство для контроля помещения, которое обнаруживает окна, газовые краны или подобные предметы.
Поскольку робот-пылесос измеряет расстояния от его текущего местоположения до препятствий, таких как мебель, офисное оборудование и стены, которые находятся в рабочем районе, таком как жилое помещение или офис, при помощи датчика, робот-пылесос может выполнять необходимую работу и может одновременно избегать столкновений с препятствиями.
Такой робот-пылесос имеет батарею для электропитания, необходимого для работы робота-пылесоса. Обычно используют подзаряжаемую батарею, которая может подзаряжаться, когда электрическая энергия батареи израсходована. Соответственно одна система содержит робот-пылесос и внешнее зарядное устройство, которое заряжает подзаряжаемую батарею робота-пылесоса.
Также требуется, чтобы робот-пылесос опознавал местоположение внешнего зарядного устройства таким образом, чтобы он автоматически возвращался к внешнему зарядному устройству, когда необходимо подзарядить батарею.
Обычный способ опознавания местоположения внешнего зарядного устройства требует генерирования внешним зарядным устройством высокочастотного сигнала и приема роботом-пылесосом генерируемого высокочастотного сигнала, при этом робот-пылесос обнаруживает местоположение внешнего зарядного устройства на основе уровня принимаемого высокочастотного сигнала.
Однако этот обычный способ имеет недостаток, состоящий в том, что происходит изменение уровня высокочастотного сигнала вследствие внешних факторов, таких как отраженные волны и интерференционные волны. Такие факторы вызывают изменения уровня высокочастотного сигнала, которые затрудняют точное обнаружение местоположения внешнего зарядного устройства.
Кроме того, даже когда робот-пылесос точно обнаружил местоположение внешнего зарядного устройства, нередки случаи, когда зарядный вывод робота-пылесоса не может точно подключиться к выводу внешнего зарядного устройства.
Соответственно существует потребность в системе робота-пылесоса и в способе стыковки робота-пылесоса с внешним зарядным устройством, которые обеспечивают точное обнаружение местоположения внешнего зарядного устройства и соединение зарядного вывода робота-пылесоса с выводом внешнего зарядного устройства.
Краткое описание изобретения
Настоящее изобретение было разработано для решения указанных выше проблем известного уровня техники. Соответственно в основу настоящего изобретения положена задача получения системы робота-пылесоса, имеющей внешнее зарядное устройство, и способа стыковки робота-пылесоса с внешним зарядным устройством, которые обеспечивают точное обнаружение местоположения внешнего зарядного устройства и соединение зарядного вывода робота-пылесоса с выводом внешнего зарядного устройства.
Указанная выше задача решена с получением системы робота-пылесоса, соответствующей настоящему изобретению, включающей вешнее зарядное устройство и робот-пылесос. Внешнее зарядное устройство включает вывод электропитания, соединенный с проводами, по которым подается коммунальное электропитание, и выводной щиток для удерживания вывода электропитания и фиксирования внешнего зарядного устройства в заданном местоположении. Робот-пылесос содержит приводной узел для перемещения корпуса пылесоса, верхнюю фотокамеру, расположенную на корпусе пылесоса, для фотографирования части потолка над районом, в котором робот-пылесос будет выполнять работу, подзаряжаемую батарею, расположенную в корпусе пылесоса и подзаряжаемую электроэнергией, подаваемой выводом электропитания, буфер, расположенный вдоль внешней окружности корпуса пылесоса и выдающий сигнал о столкновении, когда выявлено столкновение с препятствием, и зарядный вывод, расположенный на буфере для соединения с выводом электропитания и соединенный с подзаряжаемой батареей. Перед началом работы робот-пылесос фотографирует вид при взгляде вверх при помощи верхней фотокамеры, вычисляет информацию о местоположении внешнего зарядного устройства и сохраняет информацию о местоположении, когда он соединен с внешним зарядным устройством, и при возвращении к внешнему зарядному устройству робот-пылесос вычисляет траекторию возвращения на основе информации о текущем местоположении, вычисленной по изображению, сфотографированному верхней фотокамерой, и сохраненной информации о местоположении внешнего зарядного устройства, и возвращается к внешнему зарядному устройству по траектории возвращения.
Робот-пылесос содержит средство для определения, соединен ли зарядный вывод с выводом электропитания только при обнаружения сигнала, обозначающего вхождение в контакт зарядного вывода с выводом электропитания.
Предпочтительно, робот-пылесос содержит средство для определения заряда батареи для выявления количества электроэнергии, оставшейся в подзаряжаемой батарее, и блок управления для управления приводным узлом для прекращения работы и возвращения робота-пылесоса к внешнему зарядному устройству, когда от средства для определения заряда батареи принят сигнал о необходимости подзарядки.
Блок управления управляет приводным узлом для возвращения робота-пылесоса к внешнему зарядному устройству, когда завершена заданная работа.
Выводной щиток сформирован так, что он охватывает часть внешней окружности буфера робота-пылесоса.
Указанная выше задача, соответствующая настоящему изобретению, достигнута благодаря способу стыковки робота-пылесоса с внешним зарядным устройством, включающему следующие операции: прием командного сигнала начала работы; когда командный сигнал начала работы принят роботом-пылесосом, подключенным к внешнему зарядному устройству, вычисление местоположения внешнего зарядного устройства на основе изображения при взгляде вверх, сфотографированного верхней фотокамерой, и сохранение информации о местоположении; выполнение работы, заданной командным сигналом начала работы, при этом робот-пылесос движется из одного района в другой; когда принят командный сигнал о необходимости подзарядки, вычисление траектории возвращения к внешнему зарядному устройству на основе информации о текущем местоположении, вычисленной на основе изображения при взгляде вверх, сфотографированного верхней фотокамерой, и сохраненной информации о местоположении внешнего зарядного устройства, и затем возвращение по траектории возвращения; после приема от буфера сигнала о столкновении, определение того, принят ли сигнал о вхождении в контакт, при этом сигнал о вхождении в контакт означает вхождение в контакт зарядного вывода робота-пылесоса с выводом электропитания внешнего зарядного устройства; когда определено, что сигнал о вхождении в контакт не принят после приема от буфера сигнала о столкновении, коррекция угла движения робота-пылесоса на заданный угол для определения, принят ли сигнал о вхождении в контакт в таком положении; и когда определено, что сигнал о вхождении в контакт не принят после заданного количества коррекций угла движения, отход робота-пылесоса назад на заданное расстояние и выполнение операций вычисления траектории возвращения и возвращение.
Командный сигнал о необходимости подзарядки выдается, когда заданное количество заряженной электроэнергии израсходовано в ходе выполнения работы или когда работа завершена.
Заданный угол регулирования угла движения робота-пылесоса составляет 15°, и количество коррекций угла движения робота-пылесоса равно шести.
Как описано выше, когда робот-пылесос завершает предписанную работу или требует подзарядки после отделения от внешнего зарядного устройства, в соответствии с системой робота-пылесоса согласно настоящему изобретению, имеющей внешнее зарядное устройство, и согласно способу стыковки робота-пылесоса с внешним зарядным устройством робот-пылесос точно возвращается к внешнему зарядному устройству посредством использования сохраненной информации о местоположении внешнего зарядного устройства и информации о текущем местоположении. Кроме того, поскольку робот-пылесос стыкуется с внешним зарядным устройством с использованием сигнала от буфера и сигнала о вхождении в контакт от зарядного вывода, робот-пылесос точно обнаруживает местоположение внешнего зарядного устройства и точно соединяет зарядный вывод с внешним зарядным устройством.
Краткое описание чертежей
Указанные выше задачи и признаки настоящего изобретения будут понятнее благодаря более подробному описанию предпочтительного варианта осуществления настоящего изобретения со ссылками на сопутствующие чертежи, на которых:
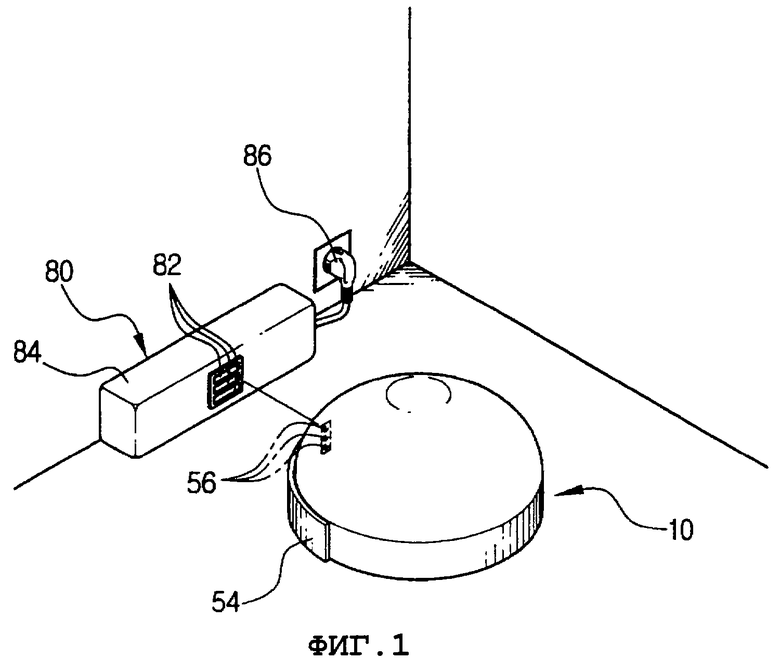
фиг.1 изображает перспективный вид, показывающий систему робота-пылесоса, имеющую внешнее зарядное устройство, соответствующую предпочтительному варианту осуществления изобретения;
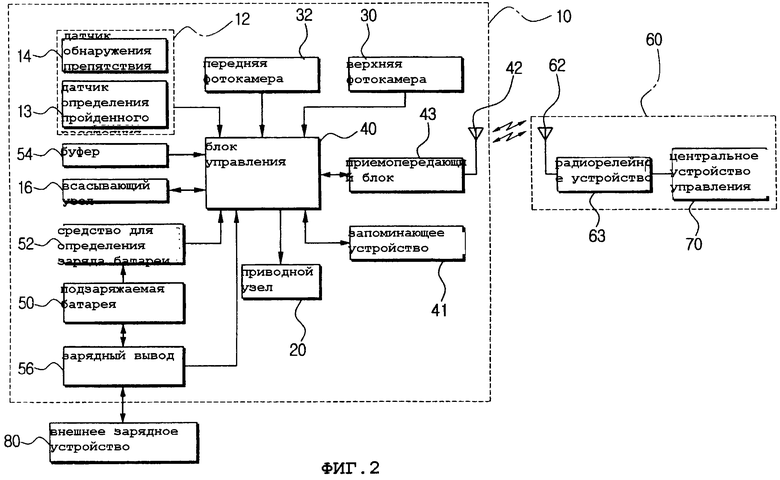
фиг.2 изображает блок-схему, показывающую элементы системы робота-пылесоса, показанной на фиг.1;
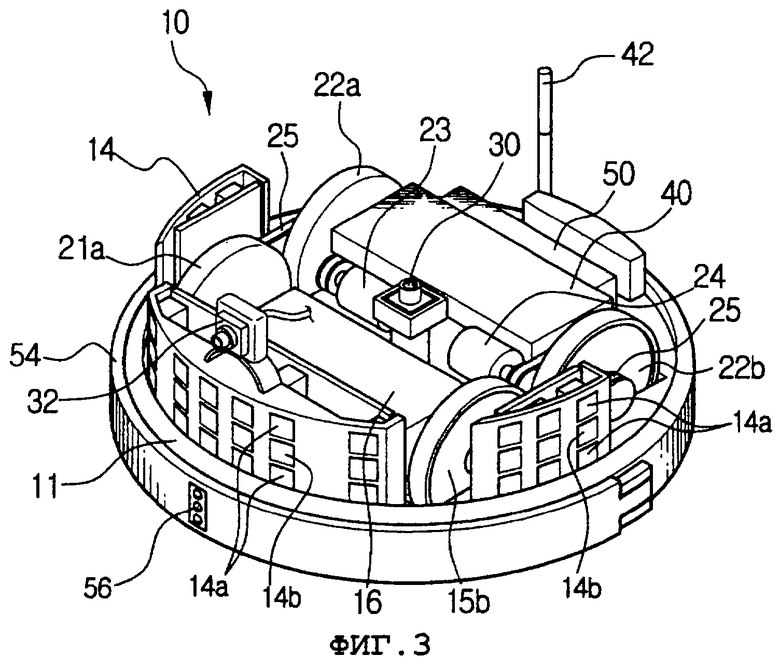
фиг.3 изображает перспективный вид, показывающий робот-пылесос, соответствующий показанному на фиг.1, со снятой крышкой;
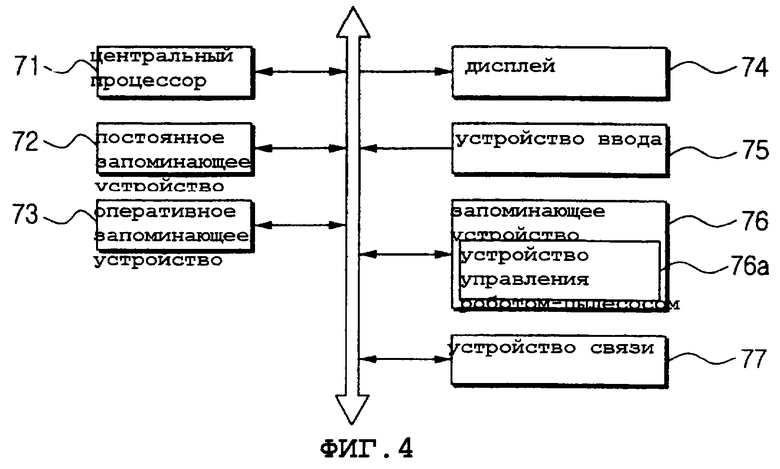
фиг.4 изображает блок-схему, показывающую центральный контроллер, показанный на фиг.2, соответствующий предпочтительному варианту осуществления изобретения;
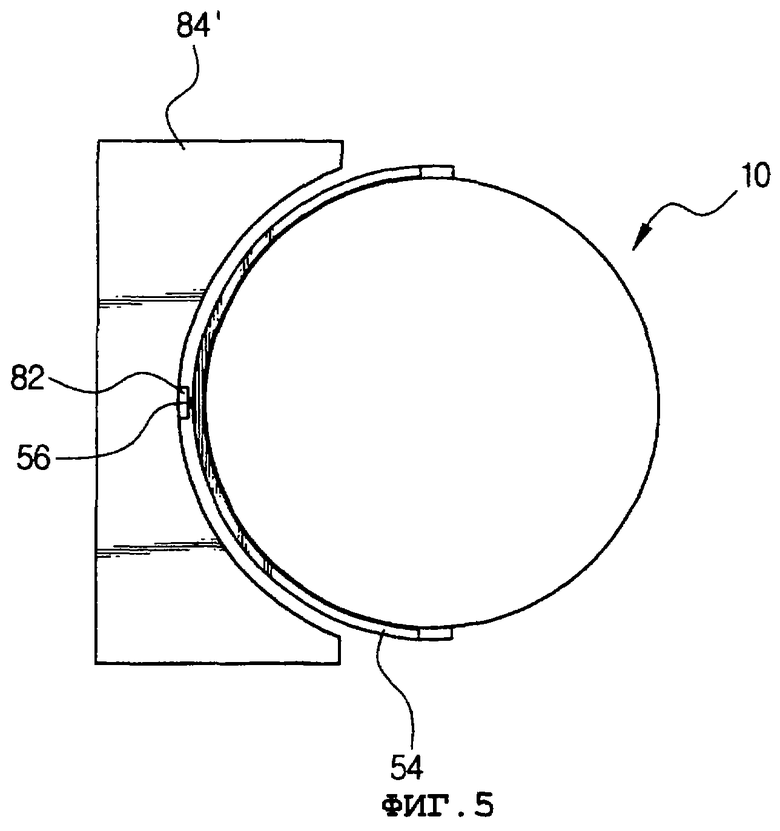
фиг.5 изображает вид в плане сверху, показывающий альтернативный вариант выполнения стыковки робота-пылесоса со стыковочным блоком внешнего зарядного устройства, имеющего конфигурацию, отличную от конфигурации в системе робота-пылесоса, показанной на фиг.1;
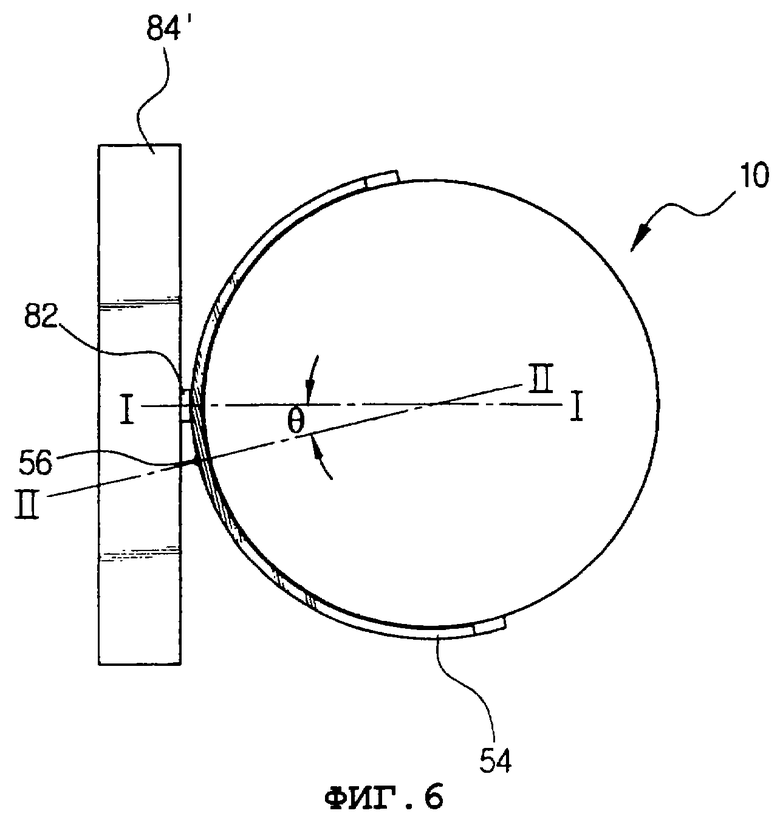
фиг.6 изображает вывод электропитания внешнего зарядного устройства и зарядный вывод робота-пылесоса в несостыкованном положении в системе робота-пылесоса, показанной на фиг.1;
фиг.7 изображает блок-схему последовательности операций, показывающую способ стыковки робота-пылесоса с внешним зарядным устройством в системе робота-пылесоса, показанной на фиг.1.
Подробное описание предпочтительного варианта осуществления изобретения
Далее будет описана более подробно со ссылками на прилагаемые чертежи система робота-пылесоса, имеющая внешнее зарядное устройство, соответствующая предпочтительному варианту осуществления изобретения.
Как показано на фиг.1-3, система робота-пылесоса содержит робот-пылесос 10 и внешнее зарядное устройство 80.
Робот-пылесос 10 содержит корпус 11 пылесоса, всасывающий узел 16, приводной узел 20, верхнюю фотокамеру 30, переднюю фотокамеру 32, блок 40 управления, запоминающее устройство 41, приемопередающий блок 43, сенсорный блок 12, буфер 54 и подзаряжаемую батарею 50.
Всасывающий узел 16 расположен внутри корпуса 11 для всасывания пыли посредством всасывания воздуха от очищаемой поверхности, находящейся против него. Всасывающий узел 16 может быть сконструирован различными общеизвестными путями. Например, всасывающий узел 16 может включать всасывающий электродвигатель (не показан) и пылесборную камеру, которая накапливает пыль, втянутую внутрь нее действием всасывающего электродвигателя через входное окно или всасывающую трубу, расположенную против очищаемой поверхности.
Приводной узел 20 включает два передних колеса 21а и 21b, расположенных на обеих передних сторонах, два задних колеса 22а и 22b, расположенных на обеих задних сторонах, электродвигатели 23 и 24 для приведения во вращение соответствующих двух задних колес 22а и 22b и по меньшей мере один зубчатый ремень 25 для передачи приводного усилия от двух задних колес 22а и 22b двум передним колесам 21а и 21b. После приема сигнала управления от блока 40 управления приводной узел 20 может приводить в действие каждый из двигателей 23, 24 по направлению вперед и назад независимо друг от друга. Направление движения задается посредством управления скоростью вращения электродвигателей 23 и 24 таким образом, что задаются разные значения скорости каждого электродвигателя для поворота и одинаковые значения скорости для движения по прямой.
Передняя фотокамера 32 расположена на корпусе 11 для фотографирования изображения при взгляде вперед и выдачи сфотографированного изображения в блок 40 управления.
Верхняя фотокамера 30 расположена на корпусе 11 для фотографирования изображения при взгляде вверх и выдачи сфотографированного изображения в блок 40 управления.
Сенсорный блок 12 включает датчики 14 обнаружения препятствия, расположенные на окружности корпуса 11 с заданными интервалами между ними и способные посылать сигнал и принимать отраженный сигнал, и датчик 13 измерения пройденного расстояния для измерения пройденного расстояния.
Каждый датчик 14 обнаружения препятствия содержит элементы 14а излучения инфракрасного света для излучения луча инфракрасного света и элементы 14b приема света для приема отраженного света, причем элементы 14а излучения инфракрасного света и элементы 14b приема света сформированы вдоль внешней окружности корпуса 11 в таком порядке, что они располагаются по вертикали относительно друг друга. В альтернативном варианте датчиком 14 обнаружения препятствий может быть датчик ультразвуковых волн, который излучает ультразвуковые волны и принимает отраженные ультразвуковые волны. Датчик 14 обнаружения препятствий может использоваться для измерения расстояния до препятствия или стены.
Датчиком 13 определения пройденного расстояния может быть датчик измерения угловой скорости, который определяет количество оборотов (оборотов в минуту) колес 21а, 21b, 22а и 22b. Например, датчиком измерения угловой скорости может быть шифратор, который определяет количество оборотов (или оборотов в минуту) электродвигателей 23 и 24.
Приемопередающий блок 43 передает данные при помощи антенны 42 и принимает сигналы при помощи антенны 42 и передает принятые сигналы в блок 40 управления.
Буфер 54 расположен вдоль внешней окружности корпуса 11 для гашения ударов при столкновениях с препятствиями, такими как стена, и выдачи сигнала о столкновении в блок 40 управления. Соответственно буфер 54 удерживается на упругом элементе (не показан), позволяющем буферу выдвигаться и задвигаться параллельно полу, по которому движется робот-пылесос 10. Датчик, который выдает сигналы о столкновении, принимаемые при столкновении буфера 54 с препятствием, прикреплен к буферу 54. Соответственно, когда буфер 54 сталкивается с препятствием, в блок 40 передается заданный сигнал о столкновении. Кроме того, на передней поверхности буфера 54 расположен зарядный вывод 56, находящийся на высоте, соответствующей высоте расположения вывода 82 электропитания внешнего зарядного устройства 80. Если подается трехфазное электропитание, требуется три электрода или узла, составляющих зарядный вывод 56.
Подзаряжаемая батарея 50 расположена в корпусе 11 и соединена с зарядным выводом 56, расположенным на буфере 54. Соответственно, когда зарядный вывод 56 состыкован с выводом 82 электропитания внешнего зарядного устройства 80, подзаряжаемая батарея 50 подзаряжается от коммунального источника электропитания переменного тока. То есть, как показано на фиг.5, когда робот-пылесос 10 соединен с внешним зарядным устройством 80, электроэнергия, подводимая по проводу 86, подключаемому к коммунальному источнику электропитания переменного тока, подается от вывода 82 электропитания внешнего зарядного устройства 80 в подзаряжаемую батарею 50 через зарядный вывод 56 буфера 54.
Средство 52 для определения заряда батареи (фиг.52) определяет оставшийся уровень заряда подзаряжаемой батареи 50 и передает сигнал о необходимости подзарядки в блок 40 управления, когда определенный уровень заряда достигает заданного нижнего порогового значения.
Блок 40 управления обрабатывает сигналы, принятые при помощи приемопередающего блока 42, и управляет соответствующими элементами. Если корпус 11 дополнительно снабжен устройством кнопочного ввода (не показано), имеющим множество кнопок для задания функций устройства, блок 40 управления обрабатывает сигналы, вводимые при помощи устройства кнопочного ввода.
Когда робот-пылесос не выполняет работу, блок 40 управления управляет соответствующими элементами таким образом, что робот-пылесос 10 может находиться в безнагрузочном дежурном режиме, будучи подключенным к внешнему зарядному устройству 80 и, таким образом, подзаряжаясь. Благодаря подключению робота-пылесоса 10 к внешнему зарядному устройству 80 в течение периодов между выполнением работы подзаряжаемая батарея 50 поддерживает определенный уровень заряда.
Когда робот-пылесос 10 возвращается к внешнему зарядному устройству после отделения от внешнего зарядного устройства 80 и после выполнения необходимой работы, блок 40 управления анализирует изображение при взгляде вверх, сфотографированное верхней фотокамерой 30, для обеспечения продвижения робота-пылесоса 10 к внешнему зарядному устройству 80 и подключения к нему.
Внешнее зарядное устройство 80 включает вывод 82 электропитания и выводной щиток 84. Вывод 82 электропитания соединен с проводом 86 электропитания через встроенный трансформатор и кабель электропитания и соединен с зарядным выводом 56 робота-пылесоса 10 для подачи, таким образом, электроэнергии в подзаряжаемую батарею 50. Провод 86 электропитания подключен к коммунальному электропитанию переменного тока, и встроенный трансформатор может быть исключен.
Выводной щиток 84 удерживает вывод 82 электропитания на такой же высоте, на которой находится зарядный вывод 56 робота-пылесоса 10, и вывод 82 электропитания зафиксирован в заданном положении. В случае, когда коммунальное электропитание переменного тока является по меньшей мере трехфазным, на выводном щитке 84 находятся три электрода, составляющие вывод 82 электропитания. Хотя в данном варианте осуществления изобретения выводной щиток 84 имеет конфигурацию прямоугольного шестигранника, ее не следует рассматривать как вносящую ограничение. То есть, выводной щиток 84 может быть сформирован в любой конфигурации, обеспечивающей удерживание и фиксацию вывода 82 электропитания. Предпочтительно выводной щиток 84′ формируют так, чтобы он охватывал внешнюю окружность робота-пылесоса 10, как показано на фиг.5.
Приведенное далее описание будет отражать процесс возвращения робота-пылесоса 10 к внешнему зарядному устройству 80 и стыковки робота-пылесоса 10 с выводом 82 электропитания в системе робота-пылесоса.
В исходном состоянии робот-пылесос 10 находится в безнагрузочном дежурном режиме, при этом его зарядный вывод 56 подключен к выводу 82 электропитания внешнего зарядного устройства 80 (фиг.5).
При приеме командного сигнала начала работы робот-пылесос 10 фотографирует потолок над рабочим районом с использованием верхней фотокамеры 30 и создает изображение при взгляде вверх и затем вычисляет информацию о местоположении внешнего зарядного устройства 80 на основе изображения при взгляде вверх и сохраняет информацию о местоположении в запоминающем устройстве 41.
Командный сигнал начала работы может включать команду о начале уборки помещения или выполнении операции наблюдения с использованием фотокамеры.
После отключения от внешнего зарядного устройства 80 робот-пылесос 10 периодически проверяет, принят ли командный сигнал о необходимости подзарядки, при этом выполняя работу, заданную командным сигналом начала работы.
При приеме командного сигнала о необходимости подзарядки блок 40 управления робота-пылесоса 10 фотографирует текущее изображение при взгляде вверх с использованием верхней фотокамеры 30 и вычисляет текущее местоположение робота-пылесоса 10. Затем блок 40 управления загружает сохраненную информацию о местоположении внешнего зарядного устройства 80, таким образом вычисляя лучшую траекторию возвращения из текущего местоположения к внешнему зарядному устройству 80. Затем блок 40 управления управляет приводным узлом 20, обеспечивая следование робота-пылесоса 10 вычисленной траектории возвращения.
Командный сигнал о необходимости подзарядки генерируется, когда робот-пылесос 10 завершил заданную работу или когда от средства 52 для определения уровня заряда батареи в ходе выполнения работы поступил сигнал о необходимости подзарядки. Кроме того, пользователь может вручную подавать командный сигнал о необходимости подзарядки в ходе работы робота-пылесоса 10.
Когда блок 40 управления принимает сигнал о столкновении, подаваемый буфером 54, блок 40 управления определяет, вошел ли зарядный вывод 56 в контакт с выводом 82 электропитания. Когда блок 40 управления принял сигнал о вхождении в контакт, подтверждающий, что зарядный вывод 56 вошел в контакт с выводом 82 электропитания, и сигнал о столкновении одновременно, блок 40 управления определяет, что зарядный вывод 56 полностью подключен к выводу 82 электропитания внешнего зарядного устройства 80 и допускает продвижение робота-пылесоса 10 вперед, пока буфер 54 не будет вжат в определенной степени, таким образом завершая электрическое соединение.
Если сигнал о столкновении принят, но сигнал о вхождении в контакт не принят, блок 40 управления определяет, что зарядный вывод 56 не подключен к выводу 82 электропитания. Случай, когда сигнал о столкновении принят, но сигнал о вхождении в контакт не принят, для примера показан на фиг 6.
Как показано на фиг.6, когда центральная линия (I-I) между центром робота-пылесоса 10 и центром вывода 82 электропитания не совпадает с центральной линией (II-II), соединяющей центр робота-пылесоса 10 с зарядным выводом 56, таким образом образуя между ними определенный угол θ, соединение вывода 82 электропитания с зарядным выводом 56 не осуществлено. Соответственно блок 40 управления управляет приводным узлом 20 для поворота робота-пылесоса 10 на определенный угол для коррекции угла движения.
Когда блок 40 управления принимает сигнал о вхождении в контакт от зарядного вывода 56 после поворота робота-пылесоса 10 на заданный угол, блок 40 управления обеспечивает продвижение робота-пылесоса 10 вперед на заданное расстояние и затем определяет, осуществлено ли электрическое подключение.
Если робот-пылесос 10 повернулся на заданный угол, но блок управления не принял сигнал о вхождении в контакт от зарядного вывода 56, блок 40 управления вновь корректирует угол движения робота-пылесоса 10. Если блок 40 управления не принял сигнал о вхождении в контакт после заданного количества попыток коррекции угла движения, блок 40 управления отводит робот-пылесос 10 назад на заданное расстояние. После этого блок 40 управления вновь загружает информацию о местонахождении внешнего зарядного устройства 80, вычисляет траекторию возвращения и управляет движением робота-пылесоса 10. Когда сигнал о столкновении и сигнал о вхождении в контакт приняты одновременно в результате повторения указанного выше процесса, блок управления продвигает робот-пылесос 10 вперед на заданное расстояние и затем определяет, получено ли электрическое подключение.
Заданный угол для коррекции угла движения определяется с учетом размеров вывода 82 электропитания внешнего зарядного устройства 80 и зарядного вывода 56 робота-пылесоса 10. Предпочтительно, угол корректируется приблизительно на 15°. Кроме того, принимая во внимание угол коррекции, может быть определена многократность коррекции угла движения. Когда угол движения скорректирован несколько раз, коррекция может производиться для увеличения заданного угла, измеряемого в одном направлении. Если сигнал о вхождении в контакт не принят даже после того, как угол движения скорректирован несколько раз от первоначального направления в одном направлении, предпочтительно вернуть робот-пылесос 10 к первоначальному угловому направлению и затем корректировать угол движения в обратном направлении. Предпочтительно, для случая, когда угол коррекции составляет 15°, угол движения робота-пылесоса 10 может корректироваться на 15° в одном направлении последовательно три раза. Если сигнал о вхождении в контакт не поступает в ходе трех последовательных коррекций, предпочтительно, чтобы угол движения робота-пылесоса 10 был скорректирован на 15° в обратном направлении три раза, измеряя от первоначального направления движения. То есть, поскольку робот-пылесос 10 может поворачиваться из положения, в котором робот-пылесос 10 первоначально соединялся с внешним зарядным устройством 80, вправо на 45° и влево на 45° для соединения с внешним зарядным устройством 80, сигнал о вхождении в контакт зарядного вывода 56 обычно принимается.
В приведенном выше описании блок 40 непосредственно анализирует изображение при взгляде вверх и сам осуществляет подключение к внешнему зарядному устройству 80.
Согласно другому аспекту настоящего изобретения для уменьшения потребностей в вычислениях для управления возвращением робота-пылесоса 10 к внешнему зарядному устройству 80, система робота-пылесоса может быть сконструирована таким образом, чтобы сохранение верхнего изображения в отношении внешнего зарядного устройства 80 и управление возвращением робота-пылесоса 10 передавались внешнему устройству управления.
Для этого робот-пылесос 10 беспроводным способом передает изображение при взгляде вверх, сфотографированное верхней фотокамерой 30, во внешнее средство управления и работает в соответствии с принимаемыми извне сигналами управления. Средство 60 дистанционного управления управляет серией операций робота-пылесоса 10, включая сигнал начала работы и управление возвращением к внешнему зарядному устройству 80.
Средство 60 дистанционного управления содержит радиорелейное устройство 63 и центральное устройство 70 управления.
Радиорелейное устройство 63 обрабатывает радиосигналы, принимаемые от робота-пылесоса 10, и передает сигналы в центральное устройство 70 управления по проводам, а также передает сигналы, принятые от центрального устройства 70 управления, роботу-пылесосу 10 беспроводным способом при помощи антенны 62.
В качестве центрального устройства 70 управления обычно используется компьютер, который показан на фиг.4 для примера. Как показано на фиг.4, центральное устройство 70 управления содержит центральный процессор 71, постоянное запоминающее устройство 72, оперативное запоминающее устройство 73, дисплей 74, устройство 75 ввода, запоминающее устройство 76 и устройство 77 связи.
Запоминающее устройство 76 снабжено средством 76а управления роботом-пылесосом для управления роботом-пылесосом 10 и для обработки сигналов, передаваемых роботом-пылесосом 10.
Когда средство 76а управления роботом-пылесосом приводится в действие, оно отображает меню для установки режима управления роботом-пылесосом 10 на дисплее 74 и обрабатывает сигналы, которые пользователь выбрал в меню, для приведения робота-пылесоса 10 в действие в соответствии с выбранным в меню режимом. Предпочтительно, меню в целом разделено на работу по уборке помещения и работу по наблюдению за помещением. В качестве субменю средство управления может предлагать мультименю, которые может обеспечивать используемое устройство, например перечень для выбора рабочего района, режим работы и т.д.
Когда в средство 76а управления роботом-пылесосом пользователем введено заданное время работы или командный сигнал начала работы при помощи устройства 75 ввода, средство 76а управления роботом-пылесосом в первую очередь принимает изображение при взгляде сверху, то есть изображение потолка, сфотографированное верхней фотокамерой 30 робота-пылесоса 10, который подключен к внешнему зарядному устройству 80 и находится в дежурном режиме, и затем вычисляет информацию о местоположении внешнего зарядного устройства 80 на основе принятого изображения при взгляде вверх и сохраняет информацию о местоположении в запоминающем устройстве 76.
После этого средство 76а управления роботом-пылесосом управляет роботом-пылесосом 10 для выполнения работы, заданной пользователем или центральным процессором. Блок 40 управления робота-пылесоса 10 управляет приводным узлом 20 и/или всасывающим узлом 16 в соответствии с управляющей информацией, принятой от средства 76а управления роботом-пылесосом через радиорелейное устройство 63, и передает изображение при взгляде вверх, сфотографированное верхней камерой 30, во внешнее центральное устройство 70 управления через радиорелейное устройство 63.
Когда средство 76а управления роботом-пылесосом принимает командный сигнал о необходимости подзарядки, такой как сигнал о необходимости подзарядки батареи, и сигнал о завершении работы от робота-пылесоса 10 через радиорелейное устройство 63, средство 76а управления роботом-пылесосом управляет роботом-пылесосом 10 описанным выше способом. Способ включает операции вычисления траектории возвращения к внешнему зарядному устройству 80 на основе информации о местоположении внешнего зарядного устройства 80, хранящегося в запоминающем устройстве 76, и изображения при взгляде вверх, в данный момент сфотографированного верхней фотокамерой, и затем возвращение робота-пылесоса 10 к внешнему зарядному устройству 80 по вычисленной траектории возвращения.
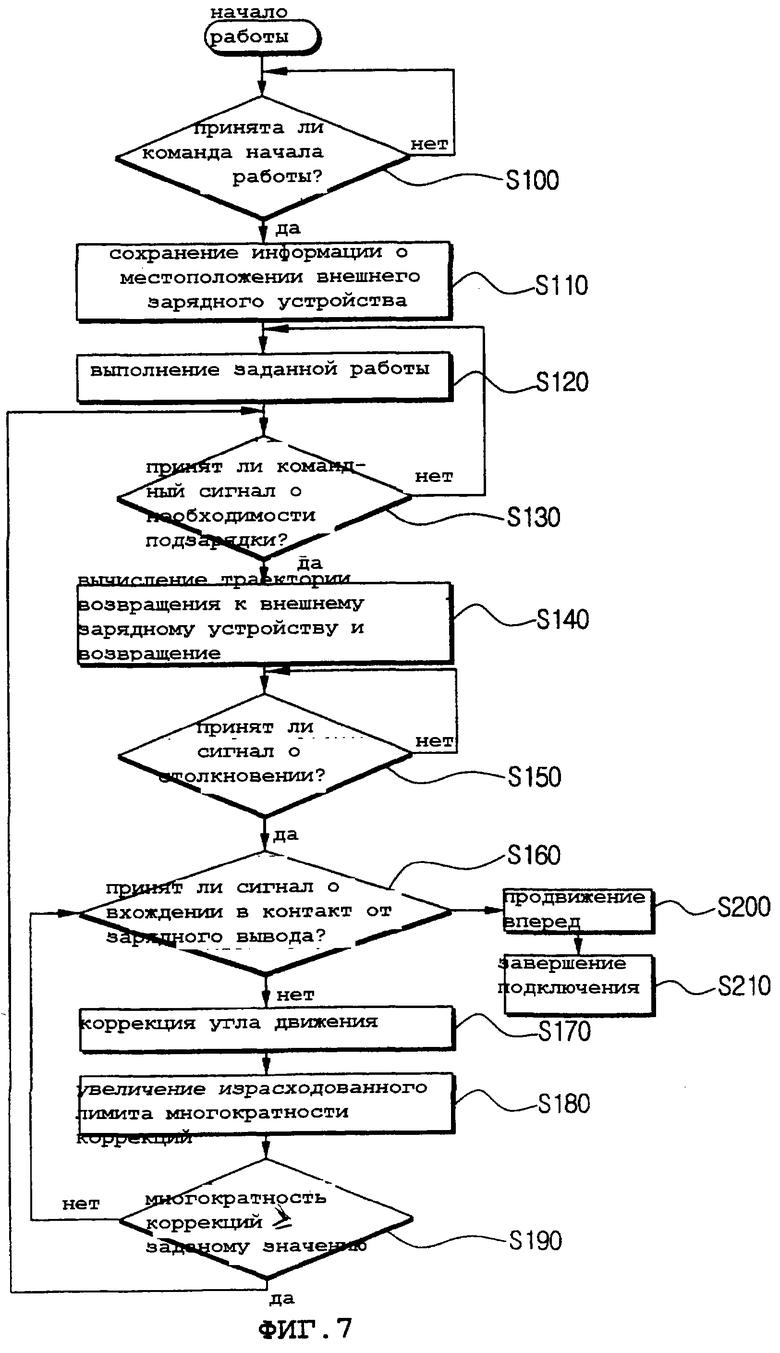
Описание способа стыковки робота-пылесоса 10 с внешним зарядным устройством 80 будет дано со ссылками на фиг.7, показывающую операции способа.
В нижеследующем описании исходное состояние определено как состояние, в котором робот-пылесос 10 подключен к внешнему зарядному устройству 80 в дежурном режиме.
В первую очередь определяется, принята ли команда начала выполнения работы (S100).
Когда определено, что команда начала работы принята, верхней фотокамерой фотографируется изображение при взгляде вверх, вычисляется информация о местоположении внешнего зарядного устройства 80 и затем сохраняется в запоминающем устройстве (S110).
После этого робот-пылесос 10 выполняет заданную работу, такую как уборка помещения или наблюдение за помещением (S120).
В этот момент робот-пылесос сначала отделяется от внешнего зарядного устройства и затем получает команду включить всасывающий узел 16, чтобы выполнять уборку помещения с одновременным движением по очищаемому району. Кроме того, когда принята команда о наблюдении за помещением, робот-пылесос движется в предписанный район от внешнего зарядного устройства и затем фотографирует заданный район с использованием фотокамеры и передает во внешнее устройство или записывает сфотографированное изображение.
Затем определяется, принят ли командный сигнал о необходимости подзарядки (S130).
Когда определено, что командный сигнал о необходимости подзарядки не принят в ходе операции S130, программа предусматривает периодическую проверку того, принят ли командный сигнал о необходимости подзарядки.
Когда определено, что командный сигнал о необходимости подзарядки принят, робот-пылесос 10 фотографирует текущее изображение при взгляде вверх с использованием верхней фотокамеры 30 и, таким образом, вычисляет информацию о текущем местоположении робота-пылесоса 10. Робот-пылесос 10 затем вычисляет траекторию возвращения к внешнему зарядному устройству 80 на основе информации о текущем местоположении и сохраненной информации о местоположении внешнего зарядного устройства 80. Используя эту информацию, робот-пылесос 10 движется по вычисленной траектории возвращения (S140).
Иногда при движении робота-пылесоса 10 от буфера 54 может быть принят сигнал о столкновении (S150).
Когда определено, что принят сигнал о столкновении, определяется, принят ли сигнал о вхождении в контакт от зарядного вывода 56 (S160).
Когда определено, что сигнал о вхождении в контакт от зарядного вывода 56 не принят в ходе операции S160, угол движения робота-пылесоса 10 корректируется на заданный угол (S170). То есть, осуществляется управление приводным узлом 20 робота-пылесоса 10 для поворота робота-пылесоса 10 на заданный угол для подключения робота-пылесоса 10 к выводу 82 электропитания. Коррекция угла движения может быть осуществлена в одном направлении, но предпочтительно, если сигнал о вхождении в контакт не был принят после заданного количества коррекций угла движения в одном направлении, чтобы угол движения корректировался в обратном направлении заданное количество раз. Например, после того, как угол движения робота-пылесоса 10 скорректирован влево три раза, и каждая коррекция составила около 15°, робот-пылесос возвращается в первоначальное или исходное положение и затем корректирует угол движения вправо три раза каждый раз на 15°.
Когда угол движения робота-пылесоса 10 скорректирован, израсходованный лимит многократности коррекции угла движения увеличен на единицу (S180).
Если израсходованный лимит многократности коррекции угла движения робота-пылесоса 10 ниже заданного значения, повторяется операция S160 для определения, принят ли сигнал о вхождении в контакт от зарядного вывода (S190).
В этот момент предпочтительно, чтобы заданный уровень лимита многократности коррекции угла движения составлял 6 раз при угле коррекции угла движения, составляющем 15°.
Когда в ходе операции S160 определено, что сигнал о вхождении в контакт от зарядного ввода 56 принят, робот-пылесос 10 продвигается вперед на заданное расстояние (S200) в скорректированном направлении, и будет определено, что подключение зарядного вывода робота-пылесоса 10 с выводом электропитания внешнего зарядного устройства 80 завершено (S210).
Как описано выше, соответствующая настоящему изобретению система робота-пылесоса, имеющая внешнее зарядное устройство 80, обеспечивает точное возвращение робота-пылесоса 10 к внешнему зарядному устройству 80. Кроме того, поскольку зарядный вывод 56 робота-пылесоса 10 точно подключается к выводу электропитания внешнего зарядного устройства, операция подзарядки выполняется эффективно.
Хотя приведенное выше описание ограничено описанием робота-пылесоса, оно может быть адаптировано для любого робота, если робот может иметь подзаряжаемую батарею, которую следует подзаряжать, и может перемещаться с использованием электроэнергии подзаряжаемой батареи.
Указанные выше варианты осуществления изобретения даны только для примера и не должны рассматриваться как вносящие ограничения в настоящее изобретение. Представленный замысел может легко применяться с другими типами устройств. Описание настоящего изобретения следует рассматривать как иллюстративное и не вносящее ограничений в объем формулы изобретения.
Специалистам в данной области будут понятны многие изменения, модификации и варианты. В формуле изобретения пункты, описывающие устройство и функции, охватывают описанные здесь конструкции как выполняющие указанные функции, и не только конструктивные эквиваленты, но также эквивалентные конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| СИСТЕМА И СПОСОБ ВОЗВРАЩЕНИЯ РОБОТА-ПЫЛЕСОСА К ЗАРЯДНОМУ УСТРОЙСТВУ | 2006 |
|
RU2338639C9 |
| ЧИСТЯЩИЙ РОБОТ, ИМЕЮЩИЙ ФУНКЦИЮ АВТОВОЗВРАТА К ЗАРЯДНОМУ УСТРОЙСТВУ, И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2005 |
|
RU2323677C2 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ ДЕТЕКТОР ТЕЛА | 2005 |
|
RU2318652C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ ЗАРЯДНОГО УСТРОЙСТВА | 2024 |
|
RU2831527C1 |
Изобретение относится к системе робота-пылесоса, способным точно стыковаться с внешним зарядным устройством, и способу стыковки с внешним зарядным устройством, содержащим вывод электропитания, соединенный с источником коммунального электропитания, и выводной щиток для удерживания вывода электропитания и фиксирования внешнего зарядного устройства в заданном местоположении. Робот-пылесос включает верхнюю фотокамеру для фотографирования потолка, батарею, подзаряжаемую электроэнергией, подаваемой выводом электропитания, буфер, расположенный вдоль внешней окружности корпуса пылесоса и выдающий сигнал, когда выявлено столкновение с препятствием, и зарядный вывод, расположенный на буфере, для соединения с выводом электропитания и соединенный с подзаряжаемой батареей. При этом, перед началом работы робот-пылесос фотографирует изображение при взгляде вверх при помощи верхней фотокамеры, вычисляет информацию о местоположении внешнего зарядного устройства и сохраняет информацию о местоположении внешнего зарядного устройства, и при возвращении к внешнему зарядному устройству робот-пылесос вычисляет траекторию возвращения на основе информации о текущем местоположении, вычисленной по изображению, сфотографированному верхней фотокамерой, и сохраненной информации о местоположении внешнего зарядного устройства, и возвращается к внешнему зарядному устройству по траектории возвращения. Изобретение позволит системе робота-пылесоса с внешним зарядным устройством точно обнаружить его местоположение и соединить зарядный вывод робота-пылесоса с выводом внешнего зарядного устройства. 2 н. и 7 з.п. ф-лы, 7 ил.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| DE 4340771 A1, 15.12.1994 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |

