ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе пылесоса-робота, содержащей пылесос-робот с аккумуляторной батареей и внешнее зарядное устройство, и, в частности, к системе пылесоса-робота, способного находить внешнее зарядное устройство, которое размещено в зоне, не обнаружимой видеокамерой, и пристыковываться к упомянутому внешнему зарядному устройству, и к способу стыковки с упомянутым устройством.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
"Пылесосом-роботом" обычно называют устройство, которое автоматически передвигается в предварительно заданных пределах рабочей зоны без обязательных манипуляций со стороны оператора и выполняет назначенные задания, например уборку, которая заключается во всасывании пыли или посторонних материалов с пола, окон или газовых вентилей в доме.
Пылесос-робот определяет при посредстве датчика расстояние до препятствия в доме или офисе, например расстояние до предметов мебели, офисного оборудования, стен и т.д., и выполняет упомянутые задания при движении по маршруту, на котором он избегает столкновений с препятствиями благодаря собранной информации.
Пылесос-робот обычно оборудован аккумуляторной батареей, которая обеспечивает необходимое питание для привода, причем для этой цели обычно применяют подзаряжаемую аккумуляторную батарею. Пылесос-робот выполнен в виде единой системы с внешним зарядным устройством, чтобы при необходимости можно было подзаряжать аккумуляторную батарею.
Чтобы обеспечить возвращение пылесоса-робота к внешнему зарядному устройству для подзарядки, пылесос-робот должен знать, где расположено внешнее зарядное устройство.
Для определения местонахождения внешнего зарядного устройства в традиционных системах внешнее зарядное устройство передает радиосигнал, а пылесос-робот принимает радиосигнал от внешнего зарядного устройства и благодаря этому определяет местоположение внешнего зарядного устройства в зависимости от уровня принятого радиосигнала.
Однако при использовании упомянутого способа определения местоположения внешнего зарядного устройства по уровню обнаруженного сигнала, иногда, когда уровень радиосигнала изменяется под воздействием таких внешних факторов, как отраженные сигналы, помехи и т.п., местоположение внешнего зарядного устройства определяется неточно.
Даже после точного определения местоположения внешнего зарядного устройства остается возможность неправильного подключения ввода подзарядки пылесоса-робота к выводу питания внешнего зарядного устройства.
Для устранения упомянутых недостатков известного уровня техники автор в корейской заявке на патент № 10-2002-0066742 (KP10-2002-0066742), поданной 31 октября 2002 г., предложил "Систему пылесоса-робота с внешним зарядным устройством и способ стыковки пылесоса-робота с внешним зарядным устройством", который позволяет пылесосу-роботу точно определить местонахождение внешнего зарядного устройства и пристыковаться к внешнему зарядному устройству.
В соответствии с KP10-2002-0066742 пылесос-робот определяет местоположение внешнего зарядного устройства с использованием верхней видеокамеры по нанесенным на потолок опознавательным меткам местоположения. Стыковка с внешним зарядным устройством всегда выполняется точно, поскольку процедура контролируется по сигналу от амортизатора и сигналу контакта между вводом подзарядки и выводом питания.
Однако система пылесоса-робота по KP10-2002-0066742 ограничена по месту установки внешнего зарядного устройства. А именно, внешнее зарядное устройство размещают только в пределах зоны, распознаваемой верхней видеокамерой пылесоса-робота. Следовательно, систему пылесоса-робота нельзя использовать в зоне с размерами больше дальности обнаружения верхней видеокамеры.
Поэтому очевидна потребность в системе пылесоса-робота и таком способе его стыковки, который позволяет пылесосу-роботу определять местоположение внешнего зарядного устройства даже за пределами зоны распознавания верхней видеокамерой и точно пристыковаться к внешнему зарядному устройству.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Соответственно, в основу настоящего изобретения положена задача создать систему пылесоса-робота с внешним зарядным устройством, который способен точно определять местоположение внешнего зарядного устройства, даже если внешнее зарядное устройство находится за пределами зоны, в которой верхняя видеокамера может обнаружить опознавательные метки расположения.
Другой задачей, положенной в основу настоящего изобретения, является создание способа стыковки пылесоса-робота и внешнего зарядного устройства, который позволяет пылесосу-роботу точно пристыковаться к внешнему зарядному устройству, даже если внешнее зарядное устройство находится за пределами распознаваемой зоны верхней видеокамеры.
Упомянутая задача решается с помощью системы пылесоса-робота в соответствии с настоящим изобретением, содержащей внешнее зарядное устройство с выводом питания, подключенным к сети питания общего пользования, опознавательную метку зарядного устройства, нанесенную на внешнее зарядное устройство, и пылесоса-робота с датчиком опознавательной метки, который обнаруживает опознавательную метку зарядного устройства, и подзаряжаемой аккумуляторной батарей. Пылесос-робот автоматически пристыковывается к выводу питания для подзарядки подзаряжаемой аккумуляторной батареи. В составе внешнего зарядного устройства смонтирован блок управления выводом питания для подачи питания только во время подзарядки пылесоса-робота.
Блок управления питанием содержит элемент крепления вывода питания, упругий элемент, подсоединенный одним концом к элементу крепления вывода питания, а другим концом - к выводу питания для упругого крепления вывода питания, и микропереключатель, смонтированный между выводом питания и элементом крепления вывода питания и срабатывающий в соответствии с изменением положения вывода питания. Элемент крепления вывода питания содержит опорный кронштейн, закрепленный к корпусу внешнего зарядного устройства, и корпус источника питания подзарядки, смонтированный у нижней поверхности опорного кронштейна и снабженный соединительным выступом, выступающим из верхней поверхности и предназначенным для подключения к микропереключателю.
Опознавательная метка зарядного устройства нанесена со стороны вывода питания. Опознавательная метка зарядного устройства выполнена из ретроотражающего материала, а датчик опознавательной метки является фотодатчиком, который способен обнаруживать ретроотражающий материал.
Опознавательная метка зарядного устройства нанесена на пол перед внешним зарядным устройством. Опознавательная метка зарядного устройства выполнена из металлической ленты, а датчик опознавательной метки является бесконтактным датчиком, который способен обнаруживать металлическую ленту.
Упомянутая задача решается также с помощью системы пылесоса-робота в соответствии с настоящим изобретением, содержащей внешнее зарядное устройство и пылесос-робот. Внешнее зарядное устройство содержит вывод питания, подключенный к источнику питания общего пользования, контактную колодку, несущую смонтированный на ней вывод питания и стационарно размещенную в предварительно заданном месте, и опознавательную метку зарядного устройства, нанесенную внизу перед контактной колодкой. Пылесос-робот содержит датчик опознавательной метки, смонтированный на днище корпуса пылесоса-робота и предназначенный для обнаружения опознавательной метки зарядного устройства, привод для перемещения корпуса пылесоса-робота, верхнюю видеокамеру, смонтированную на корпусе пылесоса-робота и предназначенную для съемки изображений потолка, амортизатор, смонтированный по наружной окружности корпуса пылесоса-робота и предназначенный для выдачи сигнала столкновения, когда пылесос-робот сталкивается с препятствием, ввод подзарядки, смонтированный на амортизаторе с возможностью подключения к выводу питания, подзаряжаемую аккумуляторную батарею, установленную на корпусе пылесоса-робота и подзаряжаемую энергией, подводимой через ввод подзарядки, и блок управления, обнаруживающий после получения команды на подзарядку опознавательную метку зарядного устройства при посредстве датчика опознавательной метки и управляющий приводом с целью подключения к внешнему зарядному устройству.
Опознавательная метка зарядного устройства нанесена перпендикулярно относительно контактной колодки. Датчик опознавательной метки смонтирован на днище корпуса пылесоса-робота с ориентацией по направлению, в котором смонтирован амортизатор.
Опознавательная метка зарядного устройства выполнена из металлической ленты, а датчик опознавательной метки является бесконтактным датчиком, способным обнаруживать металлическую ленту.
Блок управления определяет, что ввод подзарядки подлежит подключению к выводу питания, только когда поступает сигнал столкновения от амортизатора, а затем поступает сигнал контакта, указывающий на установление контакта между вводом подзарядки и выводом питания. Кроме того, пылесос-робот содержит блок измерения мощности аккумуляторной батареи, который измеряет остаточное количество энергии в подзаряжаемой аккумуляторной батарее, и после получения сигнала запроса на подзарядку от блока измерения мощности аккумуляторной батареи пылесос-робот прекращает выполнение назначенного задания и возвращается к внешнему зарядному устройству.
В соответствии с изобретением система пылесоса-робота содержит вывод питания, подключенный к источнику питания общего пользования, внешнее зарядное устройство, несущее смонтированный на нем вывод питания и контактную колодку, закрепленную в предварительно заданном положении, опознавательную метку зарядного устройства, нанесенную со стороны вывода питания на передней стороне контактной колодки, и пылесос-робот, который содержит датчик опознавательной метки, смонтированный на корпусе пылесоса-робота и предназначенный для обнаружения опознавательной метки зарядного устройства, секцию привода для перемещения корпуса пылесоса-робота, верхнюю видеокамеру, смонтированную на корпусе пылесоса-робота и предназначенную для съемки изображений потолка, амортизатор, смонтированный по наружной окружности корпуса пылесоса-робота и выполненный с возможностью выдачи сигнала столкновения в случае столкновения с препятствием, ввод подзарядки, смонтированный на амортизаторе с возможностью подключения к выводу питания, подзаряжаемую аккумуляторную батарею, установленную на корпусе пылесоса-робота и подзаряжаемую электроэнергией, подводимой через ввод подзарядки, и блок управления, выполненный с возможностью обнаружения после получения команды на подзарядку опознавательной метки зарядного устройства при посредстве датчика опознавательной метки и управления секцией привода для стыковки пылесоса-робота с внешним зарядным устройством.
Опознавательная метка зарядного устройства выполнена из ретроотражающего материала, а датчик опознавательной метки является фотодатчиком, который выполнен с возможностью обнаружения ретроотражающего материала.
Датчик опознавательной метки установлен на передней стороне пылесоса-робота.
Датчик опознавательной метки установлен с обеих сторон пылесоса-робота.
В другом варианте выполнения система пылесоса-робота содержит внешнее зарядное устройство, подключенное к сети питания общего пользования, пылесос-робот, содержащий корпус, секцию привода для привода группы колес, установленных в нижней части корпуса, верхнюю видеокамеру, смонтированную на верхней части корпуса и предназначенную для съемки изображений потолка с направления, перпендикулярного направлению движения пылесоса-робота, и дистанционный контроллер для радиоуправления пылесосом-роботом, опознавательную метку зарядного устройства, нанесенную на внешнее зарядное устройство; и датчик опознавательной метки, смонтированный на корпусе пылесоса-робота и выполненный с возможностью для обнаружения опознавательной метки зарядного устройства, причем дистанционным контроллером обнаруживается опознавательная метка зарядного устройства при посредстве датчика опознавательной метки, а затем управляется секция привода так, чтобы пылесос-робот пристыковался к внешнему зарядному устройству для подзарядки подзаряжаемой аккумуляторной батареи.
Опознавательная метка зарядного устройства нанесена со стороны вывода питания.
Опознавательная метка зарядного устройства выполнена из ретроотражающего материала, а датчик опознавательной метки является фотодатчиком, выполненным с возможностью обнаружения ретроотражающего материала.
Опознавательная метка зарядного устройства наносится на пол перед внешним зарядным устройством.
Опознавательная метка зарядного устройства выполнена из металлической ленты, а датчик опознавательной метки является бесконтактным датчиком, выполненным с возможностью обнаружения металлической ленты.
В соответствии с настоящим изобретением, способ стыковки пылесоса-робота для стыковки с внешним зарядным устройством содержит следующие этапы: пылесос-робот действует из положения подключения к внешнему зарядному устройству после получения сигнала к началу работы; пылесос-робот, после обнаружения первой опознавательной метки местоположения при посредстве верхней видеокамеры в процессе движения, сохраняет в памяти, в качестве данных о точке входа, потолочное изображение, на котором впервые обнаружена опознавательная метка местоположения; пылесос-робот выполняет назначенное задание; после ввода командного сигнала на подзарядку пылесос-робот возвращается в точку входа на основании данных текущего местоположения и сохраненных данных о точке входа, при этом данные текущего местоположения вычисляются по снятым верхней видеокамерой потолочным изображениям; внешнее зарядное устройство обнаруживается посредством обнаружения опознавательной метки зарядного устройства с использованием датчика на корпусе пылесоса-робота; пылесос-робот подключается своим вводом подзарядки к выводу питания внешнего зарядного устройства; и подзаряжаемая аккумуляторная батарея подзаряжается от внешнего источника питания через ввод подзарядки.
Этап обнаружения внешнего зарядного устройства содержит следующие этапы: пылесос-робот движется в прямом направлении, определяет, существует ли впереди препятствие, определяет препятствие и движется в одном направлении вдоль препятствия. Пылесос-робот определяет, обнаружена ли опознавательная метка зарядного устройства в процессе движения, и после обнаружения опознавательной метки зарядного устройства, переходит к этапу подключения к внешнему зарядному устройству. Если опознавательная метка зарядного устройства не обнаружена, то пылесос-робот определяет, превосходит ли пройденное расстояние предварительно заданную контрольную дистанцию, и, если превосходит, разворачивается на 180° и движется вдоль препятствия.
Этап подключения к внешнему зарядному устройству содержит следующие этапы: пылесос-робот поворачивается так, чтобы ввод подзарядки пылесоса-робота был обращен к внешнему зарядному устройству; движется и определяет, получен или нет сигнал столкновения от амортизатора; и после получения сигнала столкновения от амортизатора определяет, получен или нет сигнал контакта. Сигнал контакта указывает, что ввод подзарядки пылесоса-робота находится в контакте с выводом питания внешнего зарядного устройства. Если сигнал контакта не поступает после получения сигнала столкновения от амортизатора, то пылесос-робот корректирует угол своего движения поворотом на предварительно заданный угол и определяет, получен или нет сигнал контакта. Если сигнал контакта не поступает после предварительно заданного числа коррекций угла движения пылесоса-робота, то пылесос-робот отступает в точку входа.
Для каждой коррекции угла движения пылесоса-робота устанавливают значение угла коррекции 15°, а число коррекций угла движения устанавливают равным 6.
Командный сигнал на подзарядку формируется, если недостает мощности на этапе выполнения назначенного задания, или когда этап выполнения назначенного задания завершается.
В системе пылесоса-робота с внешним зарядным устройством в соответствии с настоящим изобретением местоположение внешнего зарядного устройства определяется точно даже в том случае, когда внешнее зарядное устройство находится за пределами зоны обнаружения, в которой верхняя видеокамера пылесоса-робота обнаруживает опознавательную метку местоположения.
Кроме того, в соответствии со способом стыковки пылесоса-робота с внешним зарядным устройством пылесос-робот может найти точное местоположение внешнего зарядного устройства и пристыковываться к нему даже в том случае, когда внешнее зарядное устройство находится за пределами зоны распознавания верхней видеокамерой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные задачи и другие признаки настоящего изобретения очевидны из следующего ниже подробного описания предпочтительного варианта его осуществления, которое ведется со ссылками на прилагаемые чертежи, на которых:
на фиг.1 представлено перспективное изображение системы пылесоса-робота с внешним зарядным устройством в соответствии с настоящим изобретением;
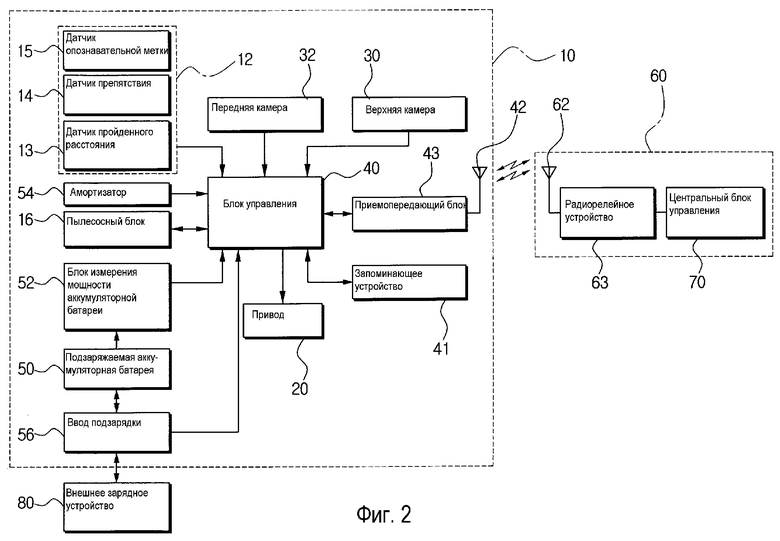
на фиг.2 представлена блок-схема системы пылесоса-робота, изображенного на фиг.1;
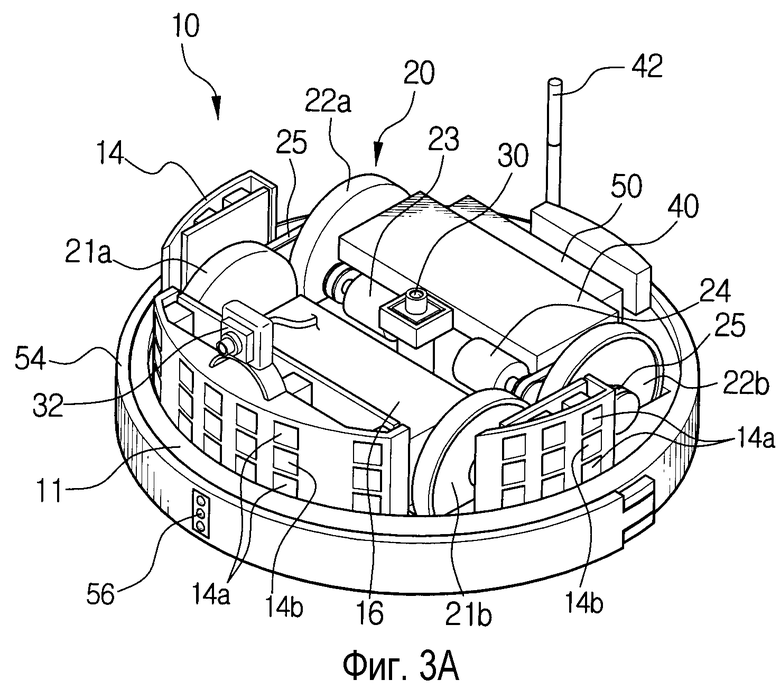
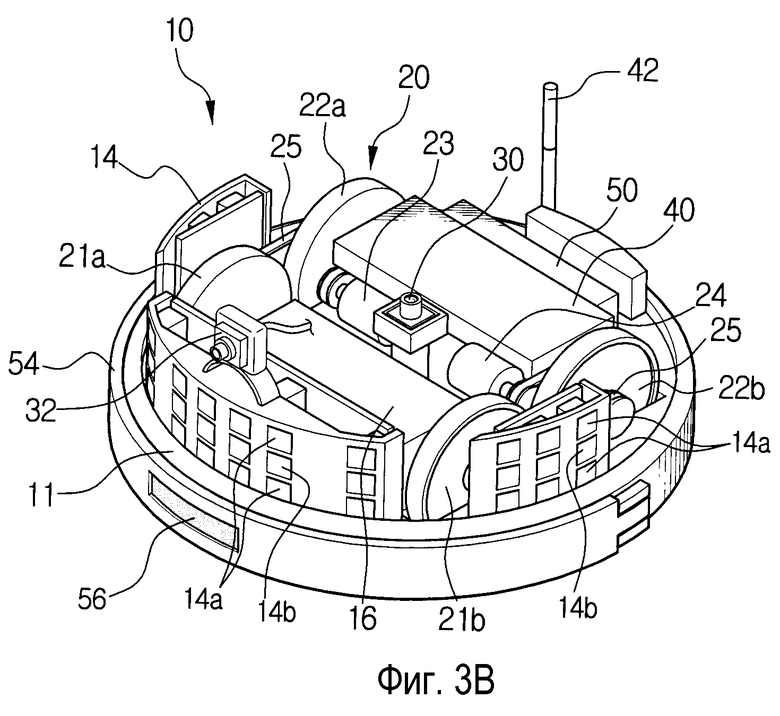
на фиг.3A и 3B представлены перспективные изображения пылесоса-робота, изображенного на фиг.1, но со снятой крышкой;
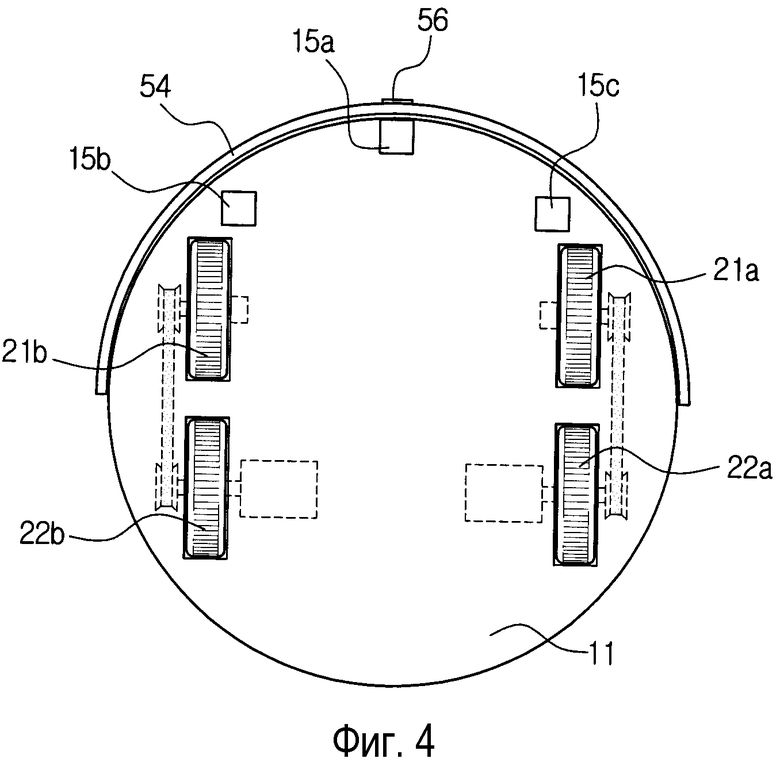
на фиг.4 представлен вид снизу пылесоса-робота, изображенного на фиг.3, показывающий низ корпуса пылесоса-робота;
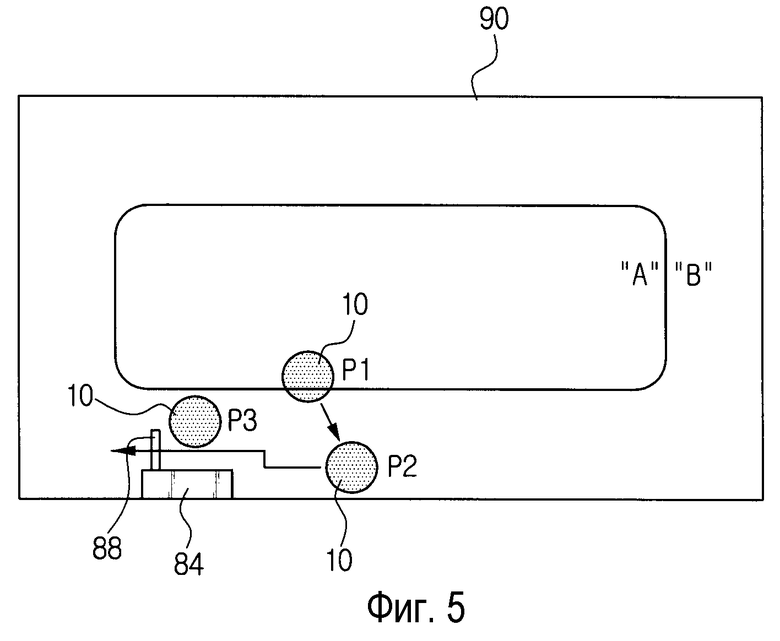
на фиг.5 представлено изображение, иллюстрирующее движение пылесоса-робота по часовой стрелке в процессе поиска внешнего зарядного устройства;
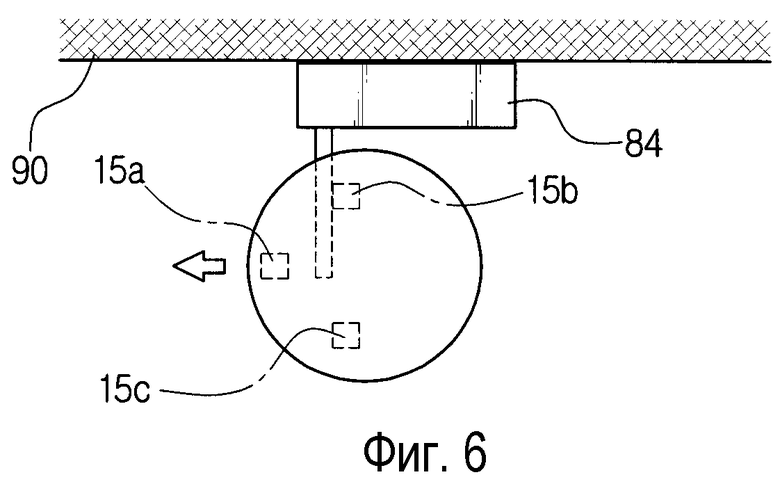
на фиг.6 представлено изображение, иллюстрирующее способ, который использует датчик обнаружения опознавательной метки пылесоса-робота, изображенного на фиг.5, для обнаружения опознавательной метки зарядного устройства;
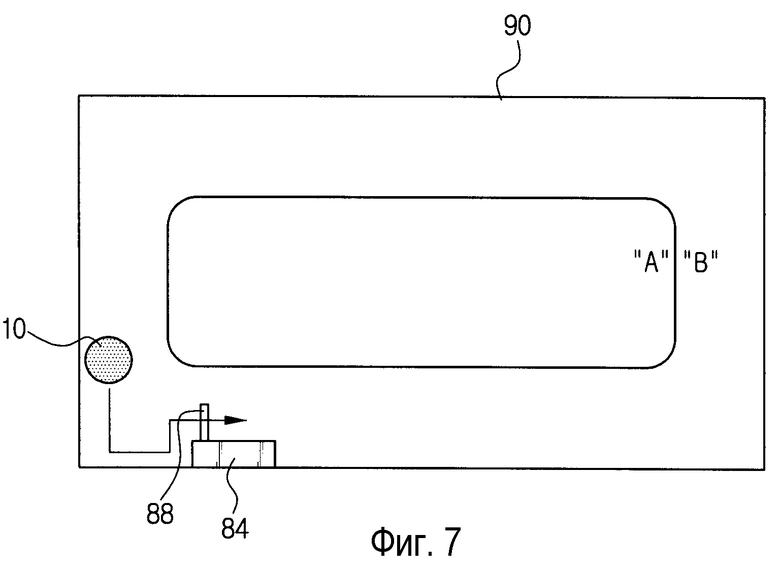
на фиг.7 представлено изображение, иллюстрирующее движение пылесоса-робота, изображенного на фиг.1, против часовой стрелки в процессе поиска внешнего зарядного устройства;
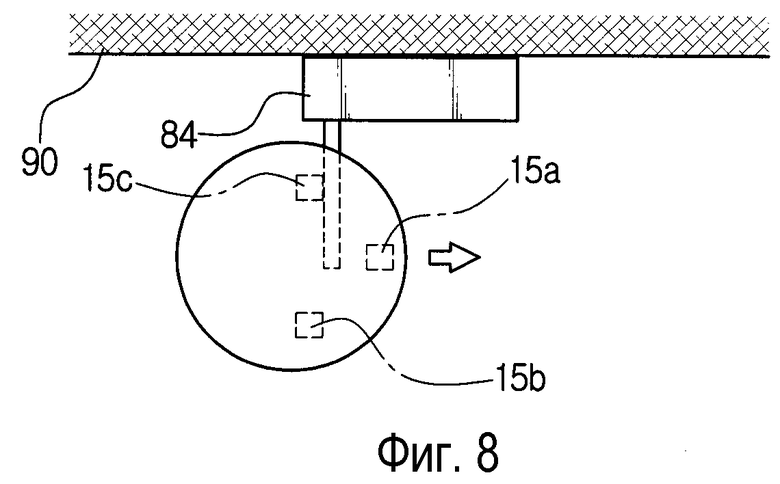
на фиг.8 представлено изображение, иллюстрирующее способ, который использует датчик обнаружения опознавательной метки пылесоса-робота, изображенного на фиг.7, для обнаружения опознавательной метки зарядного устройства;
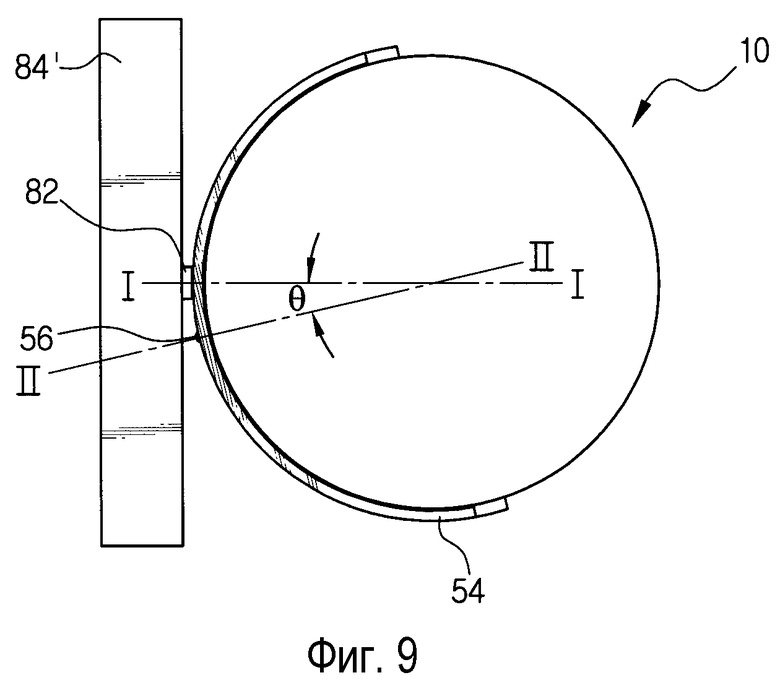
на фиг.9 представлено изображение, иллюстрирующее систему пылесоса-робота, изображенную на фиг.1, в которой вывод питания внешнего зарядного устройства не находится в контакте с вводом подзарядки пылесоса-робота;
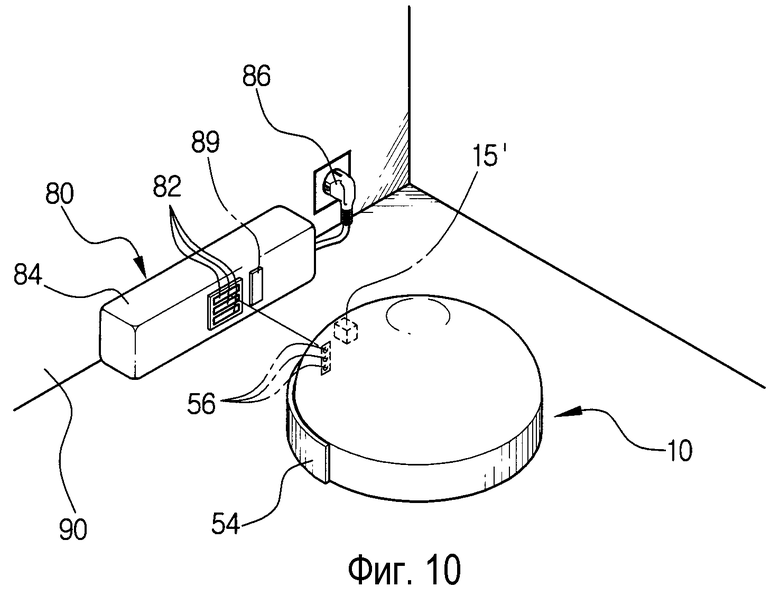
на фиг.10 представлено перспективное изображение системы пылесоса-робота с внешним зарядным устройством в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения;
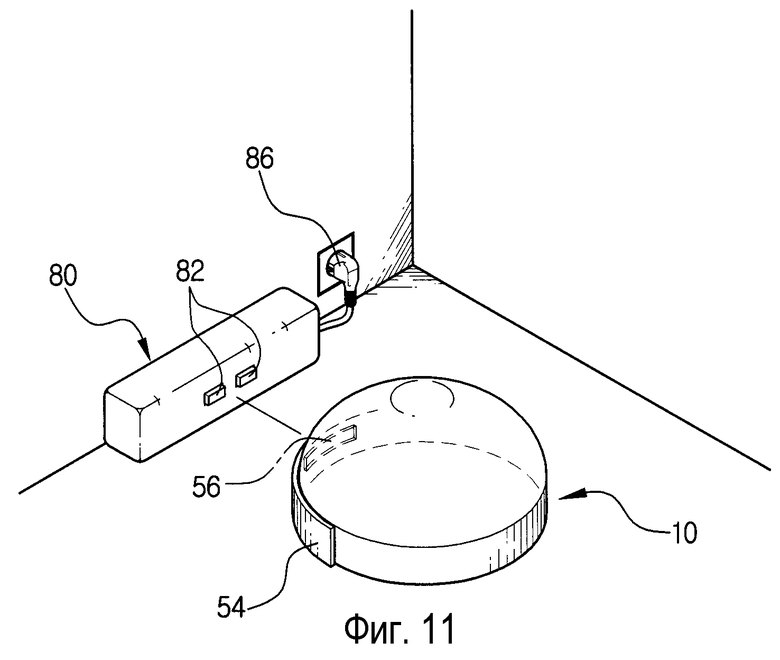
на фиг.11 представлено перспективное изображение пылесоса-робота с внешним зарядным устройством в соответствии с еще одним предпочтительным вариантом осуществления настоящего изобретения;
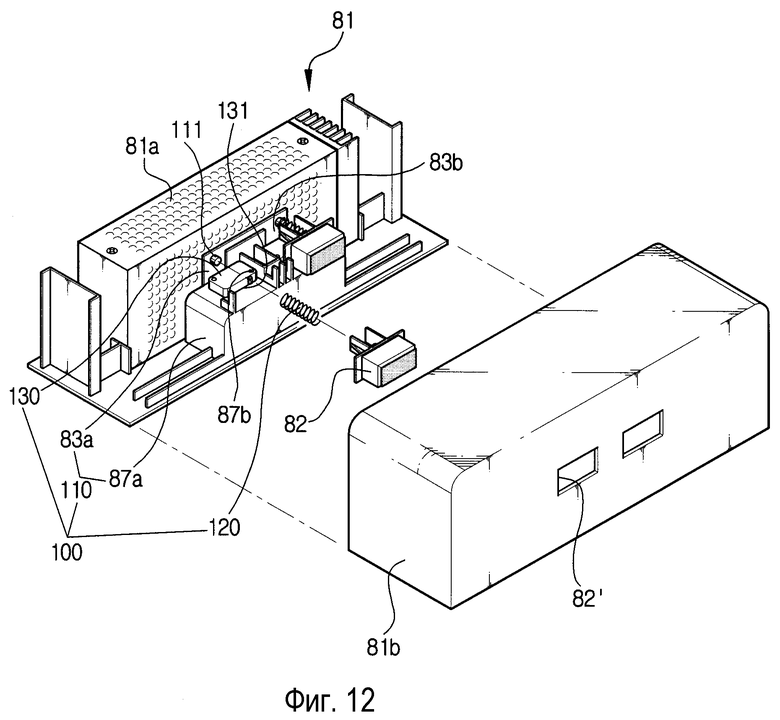
на фиг.12 представлено покомпонентное перспективное изображение внешнего зарядного устройства;
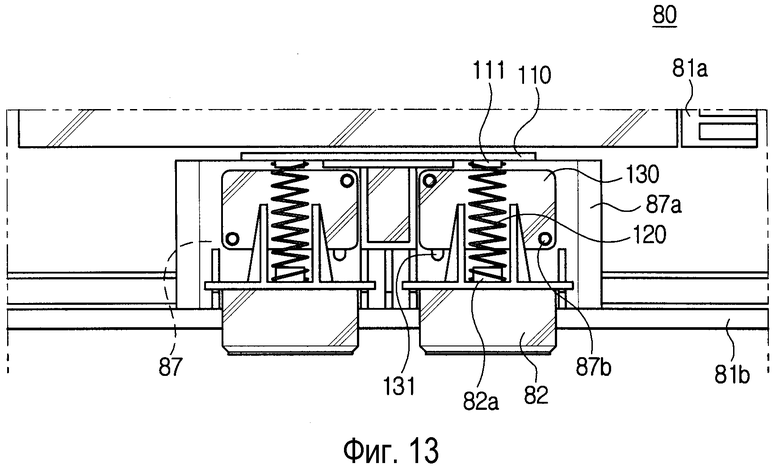
на фиг.13 представлен вид сверху на изображение фиг.12;
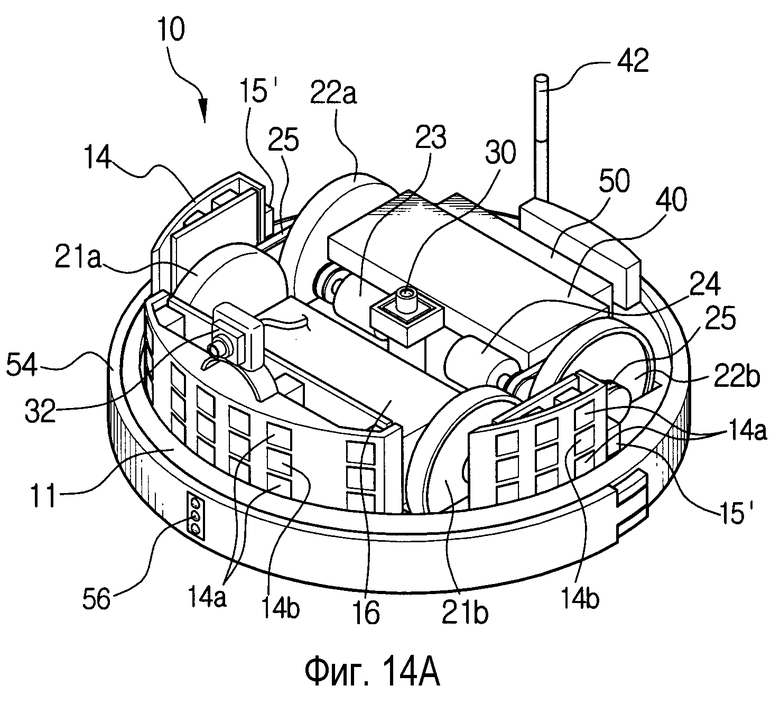
на фиг.14A представлено перспективное изображение пылесоса-робота, изображенного на фиг.13, с которого снята крышка, чтобы показать датчики опознавательной метки, установленные с двух сторон корпуса;
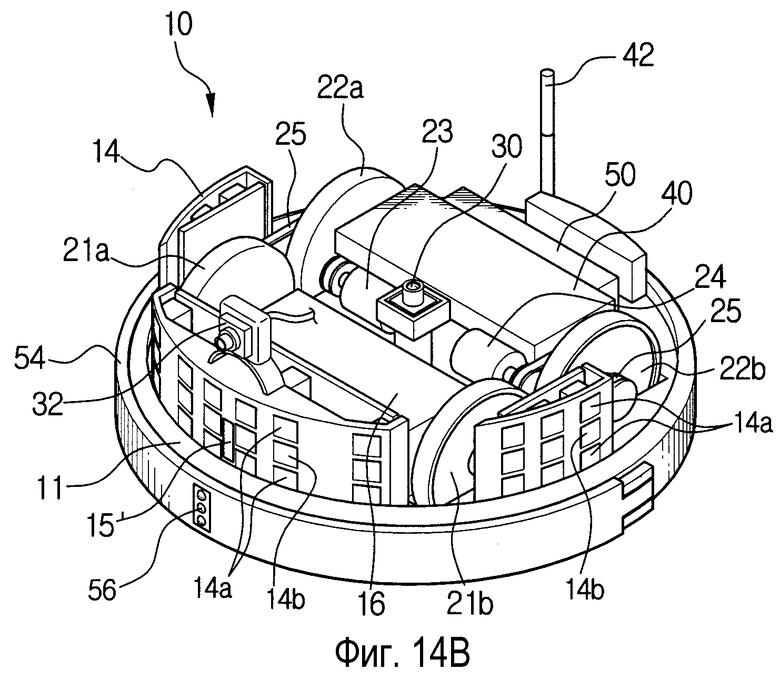
на фиг.14B представлено перспективное изображение пылесоса-робота, изображенного на фиг.13, с которого снята крышка, чтобы показать датчик опознавательной метки, установленный на передней стороне корпуса;
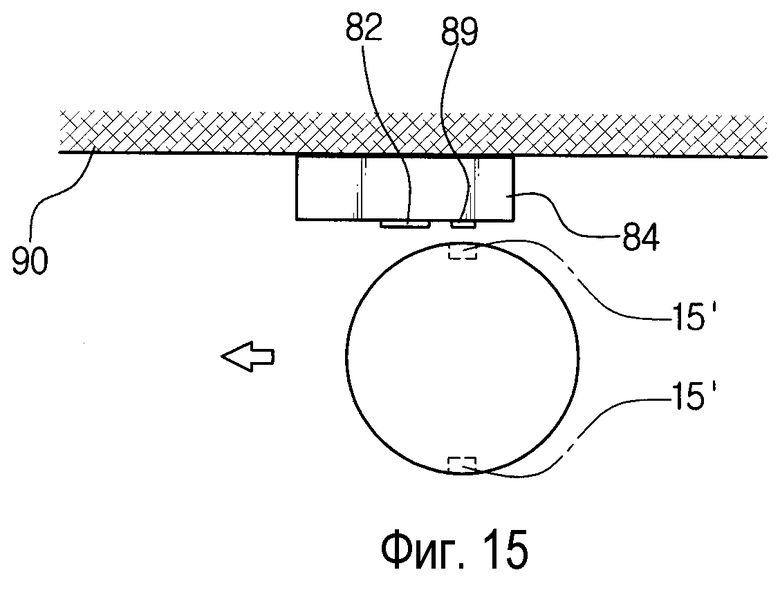
на фиг.15 представлено изображение, иллюстрирующее способ обнаружения опознавательной метки внешнего зарядного устройства при посредстве датчиков опознавательной метки, установленных с двух сторон корпуса;
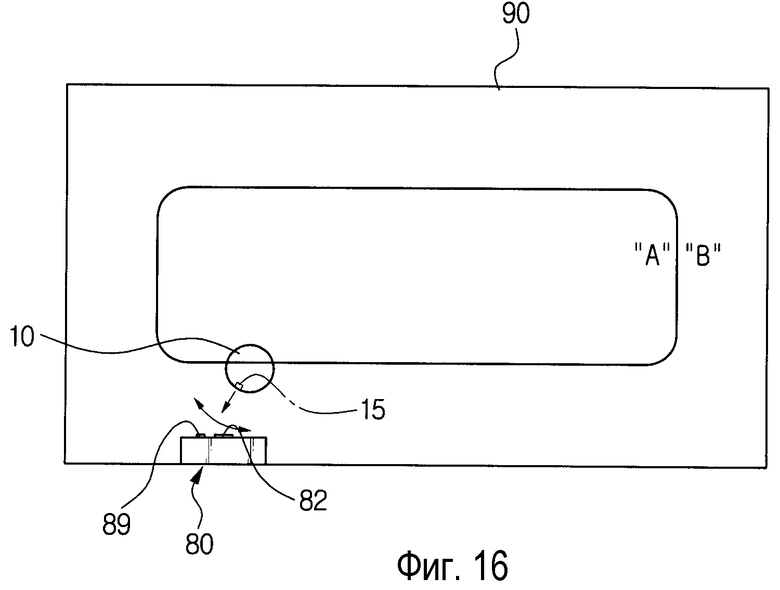
На фиг.16 представлено изображение, иллюстрирующее процесс движения пылесоса-робота, изображенного на фиг.14B, в переднем направлении при поиске внешнего зарядного устройства;
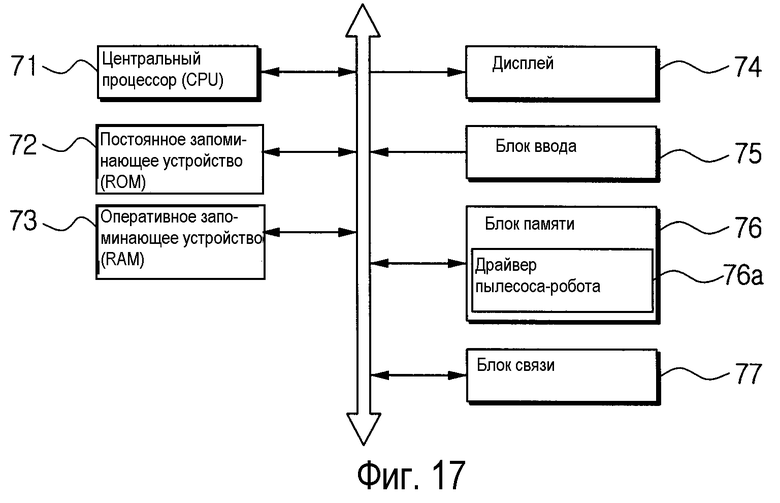
На фиг.17 представлена блок-схема центрального блока управления, показанного на фиг.2, в соответствии с одним из предпочтительных вариантов осуществления настоящего изобретения;
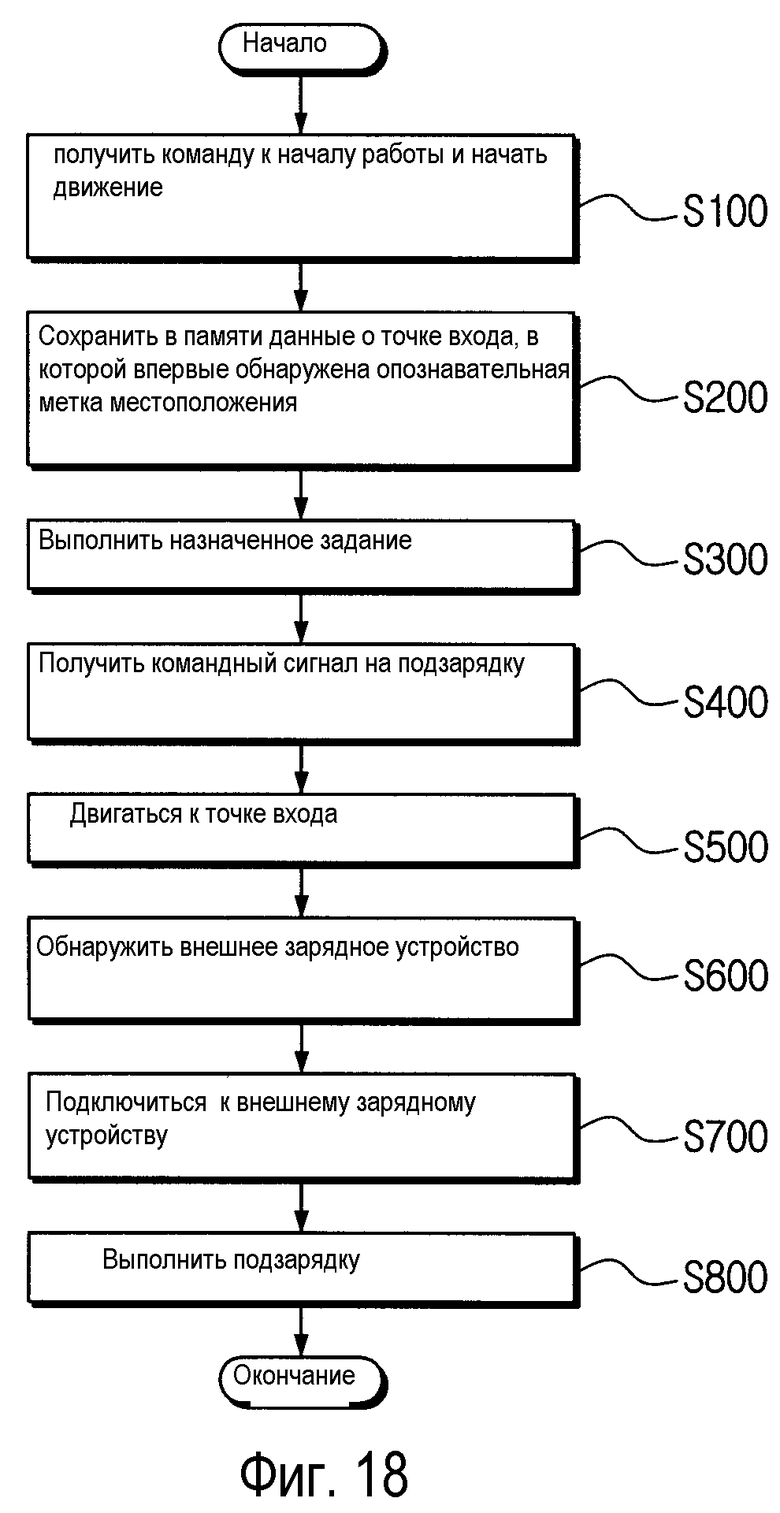
На фиг.18 представлена схема последовательности операций, иллюстрирующая способ, который система пылесоса-робота, изображенная на фиг.1, использует для стыковки пылесоса-робота с внешним зарядным устройством;
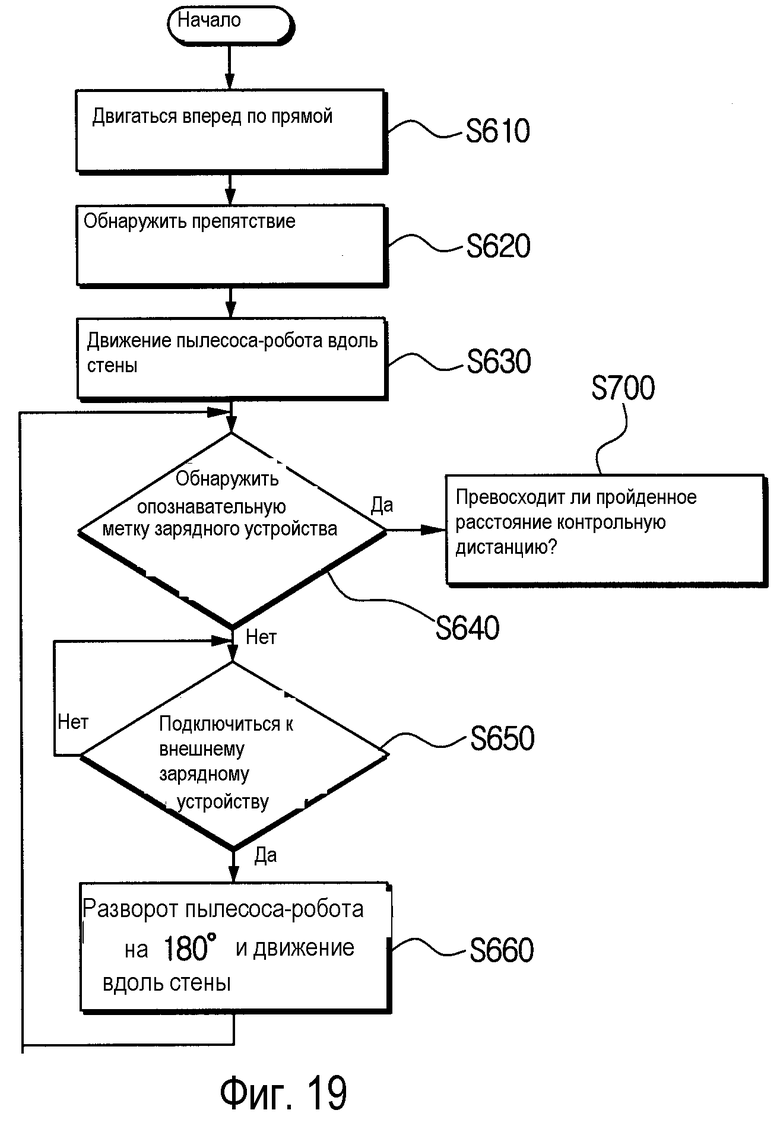
На фиг.19 представлена схема последовательности операций, иллюстрирующая процесс обнаружения внешнего зарядного устройства, изображенного на фиг.18, в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
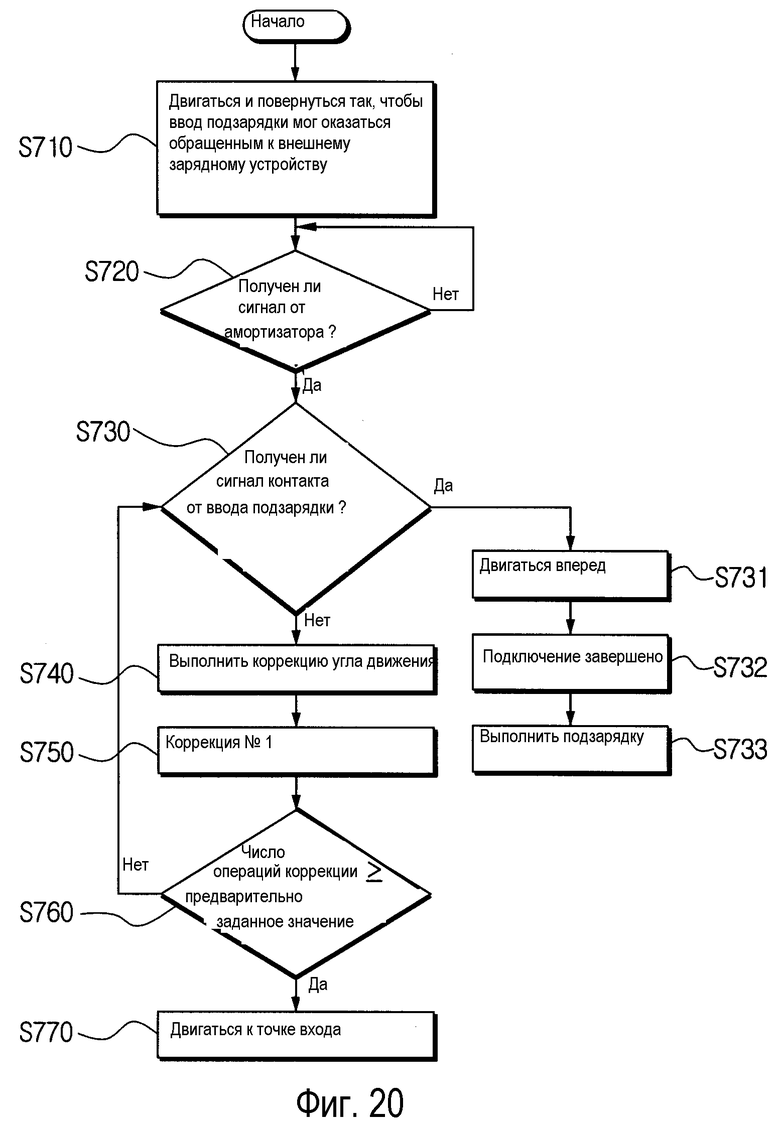
На фиг.20 представлена схема последовательности операций, иллюстрирующая процесс стыковки пылесоса-робота с внешним зарядным устройством, изображенным на фиг.19, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже следует подробное описание настоящего изобретения со ссылками на прилагаемые чертежи.
Как видно из фиг.1-3, система пылесоса-робота содержит пылесос-робот и внешнее зарядное устройство.
Пылесос-робот 10 содержит корпус 11, пылесосный блок 16, привод 20, верхнюю видеокамеру 30, переднюю видеокамеру 32, блок 40 управления, запоминающее устройство 41, приемопередающий блок 43, блок 12 датчика, амортизатор 54 и подзаряжаемую аккумуляторную батарею 50.
Пылесосный блок 16 смонтирован на корпусе 11 для всасывания воздуха вместе с пылью с пола, к которому обращен блок. Пылесосный блок 16 может быть конструктивно выполнен любым из различных известных способов. Например, пылесосный блок 16 может содержать всасывающий электродвигатель (не показан), пылеуловитель для сбора пыли, которая при вращении всасывающего электродвигателя втягивается через всасывающий канал или всасывающую трубу, обращенную к полу.
Привод 20 содержит пару передних колес 21a и 21b, установленных с обеих сторон в передней части, пару задних колес 22a и 22b, установленных с обеих сторон в задней части, электродвигатели 23 и 24 для вращения задних колес 22a и 22b, зубчатый ремень 25 для передачи приводного усилия от задних колес 22a и 22b на передние колеса 21a и 21b. Привод 20 дает возможность электродвигателям 23 и 24 вращаться независимо друг от друга в переднем или заднем направлении. Направление движения пылесоса-робота 10 зависит от управления разностью между частотами вращения электродвигателей 23 и 24.
На корпусе 11 смонтирована передняя видеокамера 32 для съемки изображений пространства впереди пылесоса-робота и передачи снятых изображений в блок 40 управления.
Блок 12 датчика содержит датчик 15 опознавательной метки, который обнаруживает опознавательную метку 88 зарядного устройства, датчики 14 препятствий, смонтированные на боковой стороне корпуса 11 с заданными промежутками и предназначенные для того, чтобы испускать сигнал и принимать отраженный сигнал, и датчик 13 пройденного расстояния, который измеряет расстояние, пройденное пылесосом-роботом 10.
Датчик 15 опознавательной метки смонтирован на днище корпуса 11, чтобы обнаруживать опознавательную метку 88 внешнего зарядного устройства 80. В предпочтительном варианте осуществления датчик 15 опознавательной метки может быть смонтирован на передней нижней части корпуса 11, на которой установлен амортизатор 54, чтобы обнаруживать опознавательную метку 88 по мере движения пылесоса-робота 10 в переднем направлении. В частности, три датчика 15a, 15b и 15с опознавательной метки установлены в два ряда таким образом, что, если включаются передний датчик 15a и один из остальных датчиков 15 b или 15c, то система распознает присутствие опознавательной метки 88 зарядного устройства. Комбинацию датчика 15 опознавательной метки и опознавательной метки 88 зарядного устройства можно выполнить с использованием разных способов при условии, что датчик 15 опознавательной метки может правильно обнаруживать опознавательную метку 88 зарядного устройства. Например, опознавательную метку 88 зарядного устройства можно выполнить из металлической ленты, а в качестве датчика 15 опознавательной метки можно применить бесконтактный датчик, способный обнаруживать металлическую ленту.
В соответствии с другим предпочтительным вариантом осуществления настоящего изобретения, представленным на фиг.14A-B, датчик 15' опознавательной метки установлен в верхней части боковой поверхности корпуса 11 пылесоса-робота, чтобы обнаруживать опознавательную метку 89 зарядного устройства, нанесенную на передней стороне внешнего зарядного устройства 80. В зависимости от характера способа, заложенного в память блока 40 управления и используемого для обнаружения внешнего зарядного устройства, датчик 15' опознавательной метки может быть установлен на передней стороне пылесоса-робота 10, т.е. на верхней стороне амортизатора 54, или с обеих сторон пылесоса-робота 10 (см. фиг.14A и 14B). Кроме того, датчик 15' опознавательной метки является датчиком, способным обнаруживать ретроотражающий материал, из которого выполнена опознавательная метка 89 зарядного устройства, и обычно используют фотодатчик отражательного типа. Фотодатчик содержит светоизлучающий элемент, который излучает свет, и светочувствительный элемент, который принимает свет, отраженный от ретроотражающего материала.
Датчик 14 препятствия содержит группу инфракрасных излучающих элементов 14a, которые излучают инфракрасный свет, и группу инфракрасных светочувствительных элементов 14b, подобранных в пары с соответствующими инфракрасными излучающими элементами 14a и принимающих отраженный свет. Пары инфракрасных излучающих элементов 14a и инфракрасных светочувствительных элементов 14b ориентированы по вертикали и размещены по внешней окружности корпуса 11. В другом примере, датчик 14 препятствия может содержать ультрафиолетовый датчик, который излучает и ультрафиолетовый свет и принимает отраженное излучение. Датчик 14 препятствия можно также применить для измерения расстояния от пылесоса-робота 10 до препятствия или стены.
Датчик поворота можно также использовать в качестве датчика 13 пройденного расстояния, определяющего скорости вращения колес 21a, 21b, 22a и 22b. Например, датчик поворота может содержать кодирующий элемент, который определяет частоту вращения электродвигателей 23 и 24. Приемопередающий блок 43 посылает данные, передаваемые при посредстве антенны 42, принимает сигнал при посредстве антенны 42 и передает принятый сигнал в блок 40 управления.
Амортизатор 54 выполнен по внешней окружности корпуса 11, чтобы амортизировать удары, когда пылесос-робот 10 сталкивается с препятствием, например со стеной, и передает сигнал столкновения в блок 40 управления. Амортизатор 54 опирается на упругий элемент (не показан) так, чтобы он имел возможность смещения в переднезаднем направлении параллельно полу, по которому движется пылесос-робот 10. Кроме того, на амортизаторе 54 установлен датчик для выдачи сигнала столкновения в блок 40 управления, когда амортизатор 54 сталкивается с препятствием. Соответственно, когда амортизатор 54 сталкивается с препятствием, то в блок 40 управления передается предварительно заданный сигнал столкновения. На высоте, соответствующей выводу 82 питания внешнего зарядного устройства 80, на передней стороне амортизатора 54 установлен ввод 56 подзарядки. Если применяется трехфазный источник питания, то число вводов 56 подзарядки равно трем.
Подзаряжаемая аккумуляторная батарея 50 смонтирована на корпусе 11 и подключена к вводу 56 подзарядки на амортизаторе 54. Соответственно, когда ввод 56 подзарядки подключен к выводу 82 питания внешнего зарядного устройства 80, то подзаряжаемая аккумуляторная батарея 50 подзаряжается от сети переменного тока. То есть, когда пылесос-робот 10 подключен к внешнему зарядному устройству 80, то энергия, поступающая из сети переменного тока по шнуру 86 питания, подается с вывода 82 питания внешнего зарядного устройства 80 через ввод 56 подзарядки на амортизаторе 54 в подзаряжаемую аккумуляторную батарею 50.
Кроме того, предусмотрен блок 52 измерения мощности аккумуляторной батареи, который измеряет остаточное количество энергии в подзаряжаемой аккумуляторной батарее 50. Если измеренная энергия подзаряжаемой аккумуляторной батареи 50 становится ниже предварительно заданного предельного уровня, то блок 52 измерения мощности аккумуляторной батареи выдает сигнал запроса на подзарядку в блок 40 управления.
Блок 40 управления обрабатывает сигналы, поступающие через приемопередающий блок 43, и соответственно управляет соответствующими элементами. На корпусе 11 может быть дополнительно предусмотрено клавиатурное устройство ввода (не показано) с набором клавиш для ввода функциональных параметров, и в этом случае блок 40 управления может обрабатывать введенные клавишами сигналы, поступающие с клавиатурного устройства ввода.
В отсутствие работы блок 40 управления осуществляет управление таким образом, что пылесос-робот 10 ожидает команды в режиме подзарядки с подключением к внешнему зарядному устройству 80. Пока пылесос-робот находится в таком режиме ожидания, т.е. в состоянии подключения к внешнему зарядному устройству 80, запас энергии в подзаряжаемой аккумуляторной батарее 50 все время может быть на предварительно заданном уровне.
Блок 40 управления получает при посредстве верхней видеокамеры 30 изображение потолка, на который нанесена опознавательная метка 10 местоположения. По потолочным изображениям вычисляется текущее местоположение пылесоса-робота 10. Рабочий маршрут пылесоса-робота 10 планируется в соответствии с инструкциями и, в соответствии с этим, пылесос-робот 10 выполняет назначенное задание в процессе движения по запланированному маршруту.
Блок 40 управления отделяется от внешнего зарядного устройства 80, выполняет задание в соответствии с инструкцией, а затем возвращается и четко пристыковывается к внешнему зарядному устройству 80 с ориентацией по потолочным изображениям, снятым верхней видеокамерой 30, и сигналам от датчика 15 опознавательной метки.
Внешнее зарядное устройство 80 содержит вывод 82 питания и контактную колодку 84. Вывод 82 питания соединен со шнуром 86 питания через внутренний трансформатор и силовой кабель и стыкуется с вводом 56 подзарядки пылесоса-робота 10 для подачи питания в подзаряжаемую аккумуляторную батарею 50. Шнур 86 питания подключается к сети питания переменного тока. Внутренний трансформатор может отсутствовать.
Контактная колодка 84 предназначена для крепления вывода 82 питания на высоте, равной высоте расположения ввода 56 подзарядки пылесоса-робота 10. Вывод 82 питания закреплен в определенном положении на контактной колодке 84. Если применяется трехфазный источник питания, то на контактной колодке 84 монтируют выводы 82 питания.
Внешнее зарядное устройство 80 содержит корпус 81 зарядного устройства, вывод 82 питания и блок 100 управления выводом питания. Как видно из фиг.1 и 10, внешнее зарядное устройство 80 предусматривает возможность работы с трехфазным питанием, или, как видно из фиг.11-13, это устройство может обеспечивать питание от 100˜240 В сети переменного тока общего пользования. В соответствии с приведенным примером осуществления настоящего изобретения, используется сеть питания общего пользования, как показано на фиг.11-13.
Как видно из фиг.12, корпус 81 зарядного устройства содержит подключаемый к сети питания шнур 86 питания (фиг.11), корпус 87a источника питания подзарядки со смонтированном в нем источником 87 питания подзарядки, теплоотвод 81 для рассеивания тепла, выделяемого в источнике 87 питания подзарядки, и кожух 81b зарядного устройства. В кожухе 81b зарядного устройства предусмотрено отверстие 82' для вывода, через которое вывод 82 питания выступает наружу.
Вывод 82 питания соединен со шнуром 86 питания через источник 87 питания подзарядки и силовой кабель и стыкуется с вводом 56 подзарядки пылесоса-робота 10 для подачи питания в подзаряжаемую аккумуляторную батарею 50. Тип применяемого вывода 82 питания определяют в соответствии с видом питания, используемого внешним зарядным устройством 80. Например, при питании трехфазной индуктивной мощностью, могут быть предусмотрены три вывода 82 питания, как показано на фиг.1, а при питании от бытовой сети предусматриваются два вывода 82 питания, как показано на фиг.11. Блок 100 управления выводом питания соединен с выводом 82 питания так, чтобы питание подавалось только в том случае, когда ввод 56 питания пылесоса-робота 10 подключен к выводу 82 питания.
Блок 100 управления выводом питания содержит элемент 110 крепления вывода питания, упругий элемент 120, подсоединенный одним концом к элементу 110 крепления вывода питания, а другим концом - к выводу 82 питания для упругого крепления вывода 82 питания, и микропереключатель 130, смонтированный между выводом 82 питания и элементом 110 крепления вывода питания и срабатывающий в соответствии с изменением положения вывода 82 питания.
Элемент 110 крепления вывода питания обеспечивает установку вывода 82 питания на высоте, равной высоте расположения ввода 56 подзарядки пылесоса-робота 10, и фиксирует вывод 82 питания в заданном положении. В конструкции элемента 110 крепления вывода питания предусмотрен опорный кронштейн 83a, закрепленный к корпусу зарядного устройства 81, и корпус 87a источника питания подзарядки, смонтированный у нижней поверхности опорного кронштейна 83a и снабженный соединительным выступом 87b, выступающим из верхней поверхности и предназначенным для подключения к микропереключателю 130.
В предпочтительном варианте осуществления, упругий элемент 120 может быть выполнен в форме винтовой пружины. Один конец упругого элемента 120 подсоединен к первому опорному выступу 111, выступающему из элемента 110 крепления вывода питания, а другой конец - ко второму опорному выступу 82a, выступающему с внутренней стороны вывода 82 питания.
Микропереключатель 130 установлен на соединительном выступе 87b, выступающем с верхней стороны корпуса 87a источника питания подзарядки, и содержит двухпозиционный переключающий элемент 131, выступающий из зоны контакта с концом вывода 82 питания. Когда вывод 82 питания действует с усилием выше возвратного усилия упругого 120 элемента и находится в контакте с микропереключателем 130, переключающий 131 элемент находится в состоянии включения и поэтому допускает подвод питания к выводу 82 питания.
Опознавательная метка 88 зарядного устройства нанесена на пол перед внешним зарядным устройством 80, чтобы пылесос-робот 10 мог распознавать местоположение внешнего зарядного устройства 80 при посредстве датчика 15 опознавательной метки (см. фиг.1). В предпочтительном варианте осуществления, опознавательная метка 88 зарядного устройства может быть нанесена перпендикулярно относительно внешнего зарядного устройства 80 таким образом, чтобы датчик 15 опознавательной метки мог точно определить местоположение внешнего зарядного устройства 80. Если датчиком 15 опознавательной метки служит бесконтактный датчик, то опознавательную метку 88 зарядного устройства целесообразно выполнить из металлической ленты, которую обнаруживает бесконтактный датчик. Длину опознавательной метки 88 зарядного устройства назначают достаточной для того, чтобы опознавательную метку 88 зарядного устройства обнаруживали, по меньшей мере, два датчика из группы датчиков 15a, 15b и 15c опознавательной метки, расположенных на днище корпуса 11, когда пылесос-робот 10 продвигается вдоль стены мимо внешнего зарядного устройства 80. Например, как показано на фиг.6 и 8 для пылесоса-робота 10 с тремя датчиками 15a, 15b и 15c опознавательной метки, эту метку устанавливают так, чтобы два датчика, 15a и 15b или 15a и 15c, из трех могли обнаружить опознавательную метку 88 зарядного устройства. Как видно из фиг.10, опознавательная метка 89 зарядного устройства в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения нанесена на передней стороне контактной колодки 84 внешнего зарядного устройства 80, чтобы распознавать положение внешнего зарядного устройства 80 при посредстве датчика 15' опознавательной метки. Так называемый, "ретроотражающий" материал отражает падающий свет точно в направлении источника света, независимо от угла падения. Соответственно, опознавательная метка 89 зарядного устройства отражает свет, который излучает датчик 15' опознавательной метки, смонтированный на пылесосе-роботе 10, обратно в направлении датчика 15' опознавательной метки. Поэтому пылесос-робот 10 может обнаружить внешнее зарядное устройство 80 в любом месте зоны уборки, пока пылесос-робот 10 находится в пределах угла, под которым свет, который излучает датчик 15' опознавательной метки, отражается опознавательной меткой 89 зарядного устройства.
Ниже, со ссылками на фиг.1-9, следует описание способа, который реализуется в системе пылесоса-робота, и посредством которого пылесос-робот 10 определяет местоположение внешнего зарядного устройства 80 и пристыковывается к выводу питания 82.
В исходном состоянии системы пылесоса-робота с внешним зарядным устройством 80 пылесос-робот 10 пребывает в режиме ожидания, а его ввод 56 подзарядки подключен к выводу 82 питания внешнего зарядного устройства 80. Внешнее зарядное устройство 80 находится в таком месте, где верхняя видеокамера 30 пылесоса-робота 10 не способна обнаружить потолочную опознавательную метку местоположения. В частности, при разделении рабочей зоны на видеокамерную зону A, в которой верхняя видеокамера 30 способна обнаружить опознавательную метку местоположения, и невидеокамерную зону B, в которой опознавательную метку местоположения обнаружить нельзя (см. фиг.5), внешнее зарядное устройство 80 оказывается в невидеокамерной зоне B.
При получении сигнала к началу работы, пылесос-робот 10 двигается вперед, отключается от внешнего зарядного устройства 80 и снимает изображения потолка верхней видеокамерой 30. После обнаружения опознавательной метки местоположения (не показана) пылесос-робот 10 вычисляет соответствующие координаты данной точки по потолочным изображениям и сохраняет вычисленные координаты в запоминающем устройстве 41. В приведенном примере пылесос-робот 10 вычисляет координату точки P1 (фиг.5), в которой пылесос-робот 10 выходит из невидеокамерной зоны B и входит в видеокамерную зону A, а затем сохраняет в памяти вычисленную координату. Впоследствии точка P1, в которой пылесос-робот 10 впервые входит в видеокамерную зону A, будет называться точкой входа. Команда к началу работы включает задание по уборке или задание по охранению с использованием видеокамеры.
В процессе выполнения назначенных заданий в соответствии с инструкциями пылесос-робот 10 периодически проверяет, получен или нет командный сигнал на подзарядку.
При получении командного сигнала на подзарядку блок 40 управления пылесоса-робота 10 снимает текущие потолочные изображения и вычисляет текущее местоположение пылесоса-робота на основе снятых изображений. Блок управления 10 загружает сохраняемую в памяти координатную информацию точки входа P1 и вычисляет оптимальный маршрут в направлении точки входа P1. Блок 40 управления предписывает приводу 20 провести пылесос-робот 10 по вычисленному оптимальному маршруту.
Командный сигнал на подзарядку формируется, когда пылесос-робот 10 заканчивает выполнение задания или получает входной сигнал запроса на подзарядку от блока 52 измерения мощности аккумуляторной батареи. Кроме того, оператор располагает возможностью предписать формирование командного сигнала на подзарядку в любой момент, когда оператору это потребуется в процессе выполнения пылесосом-роботом 10 его задания.
Когда пылесос-робот 10 достигает точки входа P1, блок 40 управления управляет приводом 20 так, чтобы пылесос-робот 10 двигался в направлении стены 90. Причина в том, что пылесос-робот 10 не в состоянии определить свое текущее местоположение в невидеокамерной зоне B с помощью верхней видеокамеры 30. После обнаружения стены 90 при посредстве датчика 14 препятствия пылесос-робот 10 останавливается во второй точке P2, которая находится на заданном расстоянии от стены 90, и затем двигается против часовой стрелки вдоль стены 90, как показано на фиг.5. В соответствии с вышеизложенным, пылесос-робот 10 направляется вдоль стены. Оператор настраивает направление движения пылесоса-робота 10 вдоль стены 90 и зазор между движущимся роботом 10 и стеной 90. Блок 40 управления управляет работой привода в процессе движения вдоль стены и определяет, обнаружена ли опознавательная метка 88 зарядного устройства датчиком 15 опознавательной метки. Когда от датчика 15 опознавательной метки поступает сигнал обнаружения близко расположенной опознавательной метки 88 зарядного устройства, блок 40 управления предписывает пылесосу-роботу 10 прекратить движение вдоль стены и пристыковаться к внешнему зарядному устройству 80. Блок 40 управления определяет, что опознавательная метка 88 зарядного устройства обнаружена, если выполняются определенные условия, например, если включается передний датчик 15a из трех датчиков 15a, 15b и 15c опознавательной метки, а затем в течение предварительно заданного временного интервала включается один из остальных датчиков 15b или 15c (см. фиг.6). Как видно из фиг.15, в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения, система определяет, что опознавательная метка 89 зарядного устройства обнаружена, если включается один из датчиков 15' опознавательной метки, установленных с обеих сторон корпуса.
Если пылесос-робот 10 не обнаруживает опознавательную метку 88 зарядного устройства в течение предварительно заданного времени после начала движения вдоль стены, то блок 40 управления предписывает пылесосу-роботу 10 повернуть на 180° и двигаться вдоль стены в направлении, противоположном предыдущему направлению движения (см. фиг.7). Если пылесос-робот 10 обнаруживает опознавательную метку 88 зарядного устройства посредством датчика 15 опознавательной метки в процессе движения вдоль стены, то блок 40 управления предписывает пылесосу-роботу 10 прекратить движение вдоль стены и пристыковаться к внешнему зарядному устройству 80. Блок 40 управления определяет, что опознавательная метка 88 зарядного устройства обнаружена, если выполняются определенные условия, например, если включается передний датчик 15a из трех датчиков 15a, 15b и 15c опознавательной метки, и в течение предварительно заданного временного интервала включается один из остальных датчиков 15b или 15c (см. фиг.8). Как вновь видно из фиг.15, в соответствии с другим предпочтительным вариантом осуществления настоящего изобретения, система определяет, что опознавательная метка 89 зарядного устройства обнаружена, если включается один из датчиков 15' опознавательной метки, установленных с обеих сторон корпуса.
Ниже следует описание способа стыковки пылесоса-робота 10 с внешним зарядным устройством 80.
Когда опознавательная метка 88 зарядного устройства обнаружена, пылесос-робот 10 двигается в направлении точки стыковки P3 и разворачивается так, чтобы ввод 56 подзарядки на амортизаторе 54 оказался обращенным к выводу 82 питания внешнего зарядного устройства 80. Точка стыковки P3 предварительно задана на основании геометрической связи между расположением вывода 82 питания внешнего зарядного устройства 80 и опознавательной метки 88 зарядного устройства. Когда пылесос-робот 10 достигает точки стыковки P3, блок 40 управления осуществляет управление так, чтобы пылесос-робот 10 двигался в направлении внешнего зарядного устройства 80.
После получения сигнала столкновения от амортизатора 54, блок 40 управления определяет, получен ли сигнал от ввода 56 подзарядки о том, что этот ввод почти вошел в контакт с выводом 82 питания. Когда сигнал столкновения от амортизатора 54 и сигнал контакта от ввода 56 подзарядки поступают одновременно, блок 40 управления определяет, что ввод подзарядки целиком подсоединился к выводу 82 питания внешнего зарядного устройства 80, и предписывает пылесосу-роботу 10 продвинуться вперед, пока на амортизатор 54 не будет воздействовать определенный нажим. В таком состоянии стыковка завершена.
Если сигнал контакта не поступает после получения сигнала столкновения, то блок 40 управления определяет, что ввод 56 подзарядки не подключается к выводу 82 питания внешнего зарядного устройства 80. Ситуация, когда поступает сигнал столкновения, но отсутствует сигнал контакта, показана на фиг.9.
Как видно из фиг.9, рассогласование на угол θ и между первой линией I-I, соединяющей центра вывода 82 питания и пылесоса-робота 10, и второй линией II-II, соединяющей центра ввода 56 подзарядки и пылесоса-робота 10, означает, что вывод 82 питания не соединен с вводом 56 подзарядки. Поэтому блок 40 управления управляет приводом 20 так, чтобы пылесос-робот 10 отодвинулся в обратном направлении на предварительно заданное расстояние, пока не выключится сигнал столкновения, повернулся на предварительно заданный угол, а затем продвинулся вперед по прямой.
После поворота на предварительно заданный угол, при получении сигнала столкновения от амортизатора 54 и сигнала контакта от ввода 56 подзарядки, блок управления командует пылесосу-роботу 10 продвинуться вперед в новом направлении и определяет, что подключение завершено.
Если сигнал контакта от ввода 56 подзарядки не поступает после поворота на предварительно заданный угол, то блок 40 управления корректирует угол движения пылесоса-робота 10. Если блок 40 управления не получает сигнала контакта от ввода 56 подзарядки после совершения предварительно заданного числа попыток, то блок 40 управления командует пылесосу-роботу 10 вернуться в точку входа P1. Блок 40 управления повторяет вышеописанные последовательности движений до тех пор, пока сигнал столкновения и сигнал контакта не будут поступать одновременно. Когда сигнал столкновения и сигнал контакта поступают одновременно, блок управления командует пылесосу-роботу 10 продвинуться вперед на предварительно заданное расстояние и завершает подключение.
Угол коррекции угла движения можно определить с учетом размера вывода 82 питания внешнего зарядного устройства 80 и ввода 56 подзарядки пылесоса-робота 10, однако, наиболее предпочтителен угол 15°. Число операций коррекции можно определить соответственно углу коррекции. В предпочтительном варианте угол движения корректируют несколько раз из начального состояния и, если сигнал контакта не поступает, то пылесос-робот 10 возвращается в начальное состояние, а затем угол движения корректируют в обратном направлении. Более того, если установлен угол коррекции 15°, то целесообразно корректировать угол движения три раза, каждый раз на 15°, и, если сигнал контакта не поступает, корректировать угол движения три раза в обратном направлении, каждый раз на 15°. В результате, пылесос-робот 10 совершает попытки подключения к выводу 82 питания влево и вправо в пределах 45° от исходного контакта с внешним зарядным устройством 80, и описанный способ в большинстве случаев обеспечивает получение сигнала контакта от ввода 56 подзарядки.
Еще в одном варианте осуществления настоящего изобретения датчик 15 опознавательной метки может быть установлен на передней стороне корпуса 11 пылесоса-робота 10, а ниже, со ссылками на фиг.13, следует описание процесса выдачи пылесосу-роботу 10 инструкций, имеющих целью обнаружение внешнего зарядного устройства 80.
Процессы движения пылесоса-робота 10 к точке входа P1 аналогичны вышеописанным процессам. Пылесос-робот 10 отсоединяется от внешнего зарядного устройства 80 и достигает точки входа P1 в той же самой позиции. Как видно из фиг.16, когда пылесос-робот 10 достигает входной точки P1, блок 40 управления поворачивает пылесос-робот 10 на предварительно заданный угол относительно передней стороны, на которой установлен ввод 56 подзарядки. Когда датчик 15' опознавательной метки срабатывает в процессе поворота пылесоса-робота 10, блок 40 управления останавливает пылесос-робот 10 и предписывает пылесосу-роботу 10 двигаться в направлении, на котором включается датчик 15' опознавательной метки. В результате, пылесос-робот 10 стыкуется с внешним зарядным устройством 80. Поскольку процесс стыковки пылесоса-робота 10 с внешним зарядным устройством 80 идентичен вышеописанному процессу, то его дальнейшее описание опущено.
Выше на примерах осуществления приведено описание блока 40 управления, автоматически выполняющего вычисления с целью обнаружения внешнего зарядного устройства 80 и стыковки с ним.
В соответствии с другой особенностью настоящего изобретения, систему пылесоса-робота можно построить таким образом, чтобы хранение потолочных изображений точки входа P1 и подключение пылесоса-робота 10 выполнял внешний блок управления. Указанная особенность направлена на сокращение объема вычислений, которые необходимо выполнять пылесосу-роботу 10 для управления действиями по обнаружению внешнего зарядного устройства 80 и стыковке с ним.
С этой целью пылесос-робот 10 передает по радиоканалу потолочные изображения, снятые верхней видеокамерой 30, и направляется в соответствии с принимаемым внешним управляющим сигналом. Предусмотренный в таком случае дистанционный контроллер 60 управляет последовательностью действий пылесоса-робота 10, включая выполнение назначенного задания и возврат к внешнему зарядному устройству 80.
Дистанционный контроллер 60 содержит радиорелейное устройство 63 и центральный блок 70 управления.
Радиорелейное устройство 63 обрабатывает радиосигналы, полученные от пылесоса-робота 10, передает полученные сигналы в центральный блок 70 управления по проводному каналу и передает по радиоканалу сигналы, полученные из центрального блока 70 управления, для пылесоса-робота 10 через антенну 62.
В качестве центрального блока 70 управления обычно используют компьютер, а один из примеров такого компьютера представлен на фиг.17. Как видно из фиг.17, центральный блок 70 управления содержит центральный процессор (CPU) 71, постоянное запоминающее устройство (ROM) 72, оперативное запоминающее устройство (RAM) 73, дисплей 74, блок 75 ввода, блок 76 памяти и блок 77 связи.
Блок 76 памяти объединен с драйвером 76a пылесоса-робота, чтобы обеспечивать управление пылесосом-роботом 10 и обрабатывать сигнал, передаваемый пылесосом-роботом 10.
Если драйвер 76a пылесоса-робота установлен, то он действует таким образом, что меню управления пылесосом-роботом 10 отображается на дисплее 74, а робот-пылесос 10 может выполнять назначения, сделанные оператором в меню управления. Это меню может содержать различные меню, например, в главном меню могут быть позиции уборки и охраны и такие подменю, как список выбора рабочих зон, список выбора способов работы и т.п.
Когда период работы задан заранее, или оператор вводит командный сигнал к началу работы при посредстве блока 75 ввода, пылесос-робот 10 отсоединяется от внешнего зарядного устройства 80, а верхняя видеокамера 30 пылесоса-робота 10 снимает потолочные изображения, т.е. изображения потолка. Соответственно, драйвер 76a пылесоса-робота получает потолочные изображения из пылесоса-робота 10 и определяет, обнаружена или нет опознавательная метка местоположения. Если событие обнаружения опознавательной метки местоположения на потолочных изображениях происходит впервые, то драйвер 76a пылесоса-робота вычисляет данные местоположения пылесоса-робота 10 для точки, в которой обнаружена опознавательная метка местоположения, и сохраняет в блоке 76 памяти вычисленные данные как точку входа.
Драйвер 76a пылесоса-робота выдает пылесосу-роботу 10 команду выполнять назначенное задание. Блок 40 управления пылесоса-робота 10 управляет приводом 20 и/или пылесосным блоком 16 в соответствии с управляющей информацией, передаваемой драйвером 76a пылесоса-робота через радиорелейное устройство 63, и передает потолочные изображения, снимаемые верхней видеокамерой 30 на текущий момент, в центральный блок 70 управления через радиорелейное устройство 63.
Если от пылесоса-робота 10 поступает сигнал запроса на подзарядку аккумуляторной батареи, или через радиорелейное устройство 63 принимается командный сигнал на подзарядку, например сигнал о завершении задания, то драйвер 76a пылесоса-робота вычисляет маршрут возвращения к внешнему зарядному устройству 80 с использованием данных о точке входа, сохраняемых в блоке памяти 76, и текущих данных местоположения, полученных из потолочных изображений, снятых и переданных верхней видеокамерой 30, и, в соответствии с этим, командует пылесосу-роботу 10 двигаться в точку входа по вычисленному маршруту возвращения. Драйвер 76a пылесоса-робота управляет пылесосом-роботом 10 в ранее описанной последовательности, чтобы пылесос-робот 10 мог пристыковаться к внешнему зарядному устройству 80.
Ниже, со ссылками на фиг.18-20, следует описание способа стыковки, который реализуется в системе пылесоса-робота с внешним зарядным устройством, в соответствии с предпочтительным вариантом осуществления настоящего изобретения, т.е. способа стыковки, предназначенного для стыковки пылесоса-робота 10 с внешним зарядным устройством 80.
В приведенном примере пылесос-робот 10 первоначально находится в режиме ожидания в состоянии подключения к внешнему зарядному устройству 80.
Когда поступает команда к началу работы, блок 40 управления предписывает пылесосу-роботу 10 двигаться вперед в направлении от внешнего зарядного устройства 80. Пылесос-робот 10 в рамках операции S100 непрерывно снимает потолочные изображения верхней видеокамерой 30 в процессе его движения.
После обнаружения первой опознавательной метки местоположения на потолочных изображениях блок 40 управления в рамках операции S200 сохраняет в запоминающем устройстве 41 координату пылесоса-робота 10 в данной точке как точку входа P1.
Пылесос-робот 10 выполняет назначенное задание, например уборку или охрану, в рамках операции S300.
Во время выполнения назначенного задания блок 40 управления в рамках операции S400 определяет, поступает или нет командный сигнал на подзарядку.
При получении командного сигнала на подзарядку блок 40 управления снимает потолочные изображения посредством верхней видеокамеры 30, вычисляет данные текущего местоположения пылесоса-робота 10, и, по данным текущего местоположения и сохраненным данным местоположения точки входа P1, блок 40 управления вычисляет маршрут возвращения пылесоса-робота 10 в точку входа P1. В рамках операции S500 блок 40 управления предписывает пылесосу-роботу 10 двигаться по вычисленному маршруту возвращения.
Когда пылесос-робот 10 приведен в точку входа P1, блок 40 управления переходит к операции S600, и пылесос-робот 10 выполняет действие по обнаружению внешнего зарядного устройства 80. Способ обнаружения, реализуемый пылесосом-роботом для обнаружения внешнего зарядного устройства 80, изображен на фиг.19.
Как видно из фиг.19, в рамках операции S610 блок 40 управления командует пылесосу-роботу 10 двигаться по прямой в направлении стены 90. В процессе движения в рамках операции S620 устанавливается, поступил ли сигнал обнаружения препятствия от датчика 14 препятствия. Если обнаруживается какое-либо препятствие, то блок 40 управления в рамках операции S630 командует пылесосу-роботу 10 двигаться по контуру стены вдоль препятствия в предварительно заданном направлении. Блок 40 управления в рамках операции S640 определяет, получен ли какой-либо сигнал обнаружения опознавательной метки 88 зарядного устройства от датчика 15 опознавательной метки в процессе движения пылесоса-робота 10 вдоль стены. Когда поступает сигнал обнаружения опознавательной метки 88 зарядного устройства, блок 40 управления в рамках операции S700 выдает пылесосу-роботу 10 сигнал на стыковку с внешним зарядным устройством.
Если сигнал обнаружения опознавательной метки 88 зарядного устройства не поступает, то блок 40 управления в рамках операции S650 определяет, превышает или нет расстояние, пройденное пылесосом-роботом 10 вдоль стены, предварительно заданную контрольную дистанцию. Предварительно заданной контрольной дистанций называют расстояние, которое оператор устанавливает применительно к внешнему зарядному устройству 80, чтобы предотвратить прохождение пылесосом-роботом 10 вдоль стены вокруг всей рабочей зоны.
Если расстояние, пройденное пылесосом-роботом 10 вдоль стены, превысило предварительно заданную контрольную дистанцию, блок 40 управления в рамках операции S660 выдает пылесосу-роботу 10 сигнал повернуть на 180°, а затем возобновить движение вдоль стены. Когда в процессе движения вдоль стены обнаруживается опознавательная метка 88 зарядного устройства, блок 40 управления выдает пылесосу-роботу 10 сигнал подключиться к внешнему зарядному устройству 80.
На фиг.20 представлена схема последовательности операций, иллюстрирующая способ стыковки пылесоса-робота 10 с внешним зарядным устройством 80 в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Как видно из фиг.20, блок 40 управления в рамках операции S710 выдает пылесосу-роботу сигнал двигаться и повернуться вокруг точки, из которой обнаружена опознавательная метка 88 зарядного устройства, так, чтобы ввод 56 подзарядки мог оказаться обращенным к внешнему зарядному устройству 80. А именно, блок 40 управления выдает пылесосу-роботу сигнал двигаться относительно опознавательной метки 88 зарядного устройства в предварительно заданном направлении и в предварительно заданную позицию. Затем блок 40 управления выдает пылесосу-роботу 10 сигнал двигаться вперед. В рамках следующей операции S720 блок 40 управления определяет, поступает ли сигнал столкновения от амортизатора 54.
Если сигнал столкновения поступает, то блок 40 управления в рамках операции S730 определяет, поступает ли сигнал контакта от ввода 56 подзарядки. Если в рамках операции S730 сигнал контакта от ввода 56 подзарядки не поступает, то блок 40 управления в рамках операции S740 выдает пылесосу-роботу 10 сигнал отступить на предварительно заданное расстояние, а затем скорректировать угол движения пылесоса-робота 10 поворотом на предварительно заданный угол. Так как пылесос-робот 10, для которого анализ сигналов показывает, что его ввод 56 подзарядки не находится в контакте с выводом 82 питания, выполнен таким образом, чтобы изменять свое направление на предварительно заданный угол и затем двигаться по прямой вперед, это повышает вероятность того, что ввод 56 подзарядки войдет в контакт с выводом 82 питания.
Угол движения можно корректировать в одном направлении, однако, целесообразнее производить коррекцию в обоих направлениях. В соответствии с вышеизложенным, если сигнал контакта не поступает после нескольких операций коррекции в одном направлении, коррекцию можно выполнять заданное число раз в противоположном направлении. Например, если сигнал контакта не поступает даже после того, как пылесос-робот 10 скорректировал угол движения три раза, каждый раз на 15°, в левом направлении, то пылесос-робот 10 возвращается в начальное состояние, а затем корректирует угол движения три раза, каждый раз на 15°, в правом направлении.
Каждый раз, когда пылесос-робот 10 корректирует угол движения, на счет операции S750 добавляется одна коррекция. Затем в рамках операции S760 определяется, меньше или нет подсчитанное значение предварительно заданного числа поправок. Если меньше, то управление возвращается к операции S730, на которой определяется, поступает или нет сигнал контакта от ввода 56 подзарядки. Предварительно заданное число настроек целесообразно установить "6 раз" в предположении, что для операции S740 установлен угол коррекции 15°.
Когда в рамках операции S730, наконец, определяется сигнал контакта от ввода 56 подзарядки, пылесос-робот 10 продвигается в установленном направлении на расстояние, предварительно заданное для операции S730, и начинает подзарядку в рамках операции S733 с определением в рамках операции S732, что ввод 56 подзарядки пылесоса-робота 10 полностью подключен к выводу 82 питания внешнего зарядного устройства 80.
В системе пылесоса-робота с внешним зарядным устройством в соответствии с настоящим изобретением, описание которого приведено выше, внешнее зарядное устройство определяется точно даже в том случае, когда внешнее зарядное устройство находится в зоне, где невозможно обнаружение верхней видеокамерой, т.е. в невидеокамерной зоне, и, в результате, пылесос-робот всегда точно пристыковывается к внешнему зарядному устройству.
Выше настоящее изобретение описано только на примере пылесоса-робота, однако, очевидно, что настоящее изобретение применимо для всех видов роботов, оснащенных подзаряжаемой аккумуляторной батареей и выполняющих назначенное задание, а также автоматически возвращающихся к внешнему зарядному устройству, когда возникает потребность в подзарядке.
Выше настоящее изобретение описано на немногих предпочтительных примерах его осуществления, однако, специалистам в данной области техники очевидно, что настоящее изобретение не ограничено описанными предпочтительными примерами осуществления, и что в него могут быть внесены различные изменения и дополнения, которые не выходят за пределы существа и объема изобретения, определенные формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| СИСТЕМА И СПОСОБ ВОЗВРАЩЕНИЯ РОБОТА-ПЫЛЕСОСА К ЗАРЯДНОМУ УСТРОЙСТВУ | 2006 |
|
RU2338639C9 |
| ЧИСТЯЩИЙ РОБОТ, СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО И СПОСОБ ВОЗВРАЩЕНИЯ ЧИСТЯЩЕГО РОБОТА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2001 |
|
RU2218859C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
| СПОСОБ РАСПОЗНАВАНИЯ МЕТОК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РОБОТА-ПЫЛЕСОСА И РОБОТ-ПЫЛЕСОС, ИСПОЛЬЗУЮЩИЙ ДАННЫЙ СПОСОБ | 2003 |
|
RU2248176C1 |
| РОБОТ-ПЫЛЕСОС И СИСТЕМА РОБОТА-ПЫЛЕСОСА | 2003 |
|
RU2262878C2 |
Система пылесоса-робота может быть использована для уборки пыли и посторонних материалов с пола, окон или газовых вентилей в доме и обеспечивает возможность точного определения пылесосом-роботом местоположения внешнего зарядного устройства, даже если оно находится за пределами зоны, в которой верхняя видеокамера может обнаружить опознавательные метки расположения, а способ стыковки позволяет пылесосу-роботу точно пристыковаться к внешнему зарядному устройству. Система пылесоса-робота содержит внешнее зарядное устройство с выводом питания, подключенным к сети питания общего пользования, опознавательную метку зарядного устройства, нанесенную на внешнее зарядное устройство, пылесос-робот с датчиком опознавательной метки, который обнаруживает опознавательную метку зарядного устройства, и с подзаряжаемой аккумуляторной батарей. Пылесос-робот выполнен с возможностью автоматической пристыковки к выводу питания для подзарядки подзаряжаемой аккумуляторной батареи. Система имеет блок управления выводом питания, смонтированный в составе внешнего зарядного устройства, для подачи питания только во время подзарядки пылесоса-робота и содержащий элемент крепления вывода питания, упругий элемент, подсоединенный одним концом к элементу крепления вывода питания, и подсоединенный другим концом к выводу питания для упругого крепления вывода питания, и микропереключатель, смонтированный между выводом питания и элементом крепления вывода питания и срабатывающий в соответствии с изменением положения вывода питания. Согласно способу стыковки пылесоса-робота с внешним зарядным устройством осуществляют отодвигание пылесоса-робота из положения подключения к внешнему зарядному устройству после получения сигнала к началу работы, при этом пылесос-робот после обнаружения первой опознавательной метки местоположения при посредстве верхней видеокамеры в процессе движения сохраняет в памяти, в качестве данных о точке входа, потолочное изображение, на котором впервые обнаружена первая опознавательная метка местоположения. Пылесосом-роботом выполняют назначенное задание, после ввода командного сигнала на подзарядку пылесос-робот возвращают в точку входа на основании данных текущего местоположения и сохраненных данных о точке входа, при этом данные текущего местоположения вычисляют по снятым верхней видеокамерой потолочным изображениям. Внешнее зарядное устройство обнаруживают посредством обнаружения опознавательной метки зарядного устройства с использованием датчика на корпусе пылесоса-робота, который подключают своим вводом подзарядки к выводу питания внешнего зарядного устройства. Подзаряжаемую аккумуляторную батарею подзаряжают от внешнего источника питания через ввод подзарядки. 5 н. и 24 з.п. ф-лы, 22 ил.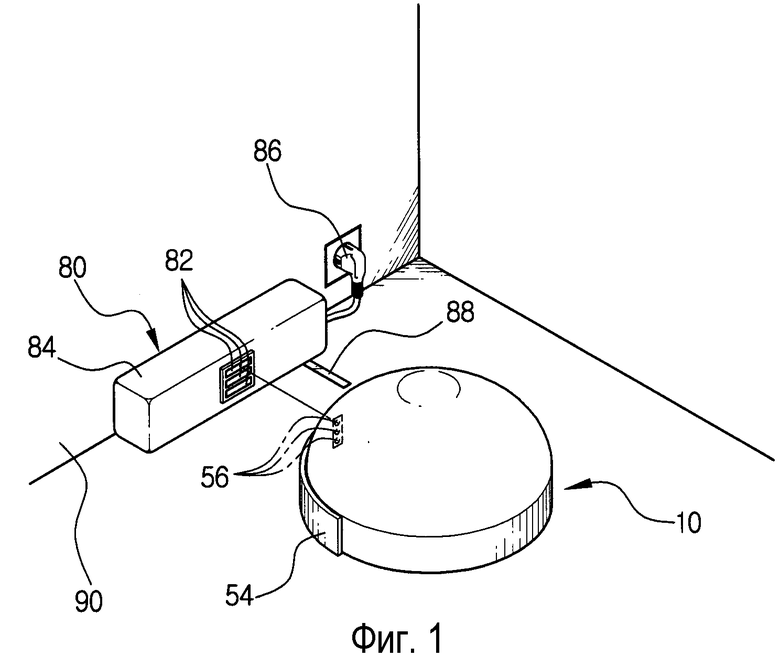
| ХОЛОДИЛЬНИК МНОГОФУНКЦИОНАЛЬНЫЙ (ДВА ВАРИАНТА) И СПОСОБ ОХЛАЖДЕНИЯ В КАМЕРЕ ХОЛОДИЛЬНИКА МНОГОФУНКЦИОНАЛЬНОГО (ЧЕТЫРЕ ВАРИАНТА) | 2007 |
|
RU2376536C2 |
| ВСТРАИВАЕМЫЙ ТРЕНАЖЕРНЫЙ АППАРАТ И АГРЕГАТ, СОДЕРЖАЩИЙ ТРЕНАЖЕРНЫЙ АППАРАТ И ДУШЕВУЮ КАБИНУ ИЛИ КАБИНУ ДЛЯ САУНЫ | 1999 |
|
RU2185866C2 |
| DE 4340771 A1, 15.12.1994 | |||
| US 5787545 А, 04.08.1998 | |||
| US 4496896 А, 29.01.1985 | |||
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

