Область техники
Настоящее изобретение относится в целом к роботу-пылесосу, системе уборки помещения роботом и способу управления роботом и более конкретно к роботу-пылесосу, системе уборки помещения роботом и способу управления роботом, способным независимо определять, завершена ли необходимая работа по уборке помещения в рабочем районе, и завершать работу по уборке помещения в рабочем районе и после этого перемещаться в другой район для выполнения работы по уборке помещения или пребывания в дежурном режиме в ожидании другой команды.
Уровень техники
При использовании обычного робота-пылесоса пользователь определяет общие очертания рабочего района, который необходимо убрать, и эффективную траекторию движения в рабочем районе, которые следует ввести в блок управления перед началом уборки роботом-пылесосом рабочего района. Таким образом, когда робот-пылесос завершает движение вдоль введенной траектории движения, уборка рабочего района также завершается. Однако этот подход создает проблему, состоящую в том, что пользователь должен вводить измененные очертания рабочего района в робот-пылесос каждый раз, когда в рабочем районе появляется любое препятствие или когда изменяется местоположение существующих препятствий.
Для решения указанных выше проблем применен способ, благодаря которому робот-пылесос движется по контуру рабочего района, который ограничен стеной или препятствием, посредством использования ультразвукового датчика, установленного на основном корпусе, для определения протяженности рабочего района, и затем планирует траекторию движения для выполнения работы по уборке в заданном рабочем районе. После этого робот-пылесос движется по запланированной траектории движения и затем завершает уборку рабочего района, завершая движение. Однако этот способ вызывает проблемы, такие как потребность в длительном времени уборки помещения и, таким образом, следующая из этого потребность в большой емкости батареи робота-пылесоса, который должен двигаться вдоль очертаний рабочего района для определения протяженности рабочего района без фактического выполнения работы по уборке помещения.
Кроме того, пользователь не может определить, где робот-пылесос завершил работу по уборке помещения и не может предполагать, когда робот-пылесос завершит всю работу по уборке помещения, пока работа не будет завершена.
Соответственно, необходимо получить робот-пылесос, способный независимо определять, завершена ли работа по уборке помещения в рабочем районе, а также оповещать пользователя о продвижении работы по уборке помещения в ходе работы.
Краткое описание изобретения
В основу настоящего изобретения положена задача решения по меньшей мере указанных выше проблем и/или устранение недостатков и получение робота-пылесоса, системы уборки помещения роботом и способа управления им, позволяющего независимо определять, завершена ли работа по уборке помещения, без предварительного ввода пользователем информации о рабочем районе.
Другой задачей изобретения является получение системы уборки помещения роботом, который способен оповещать пользователя о продвижении работы по уборке помещения в ходе работы, выполняемой роботом-пылесосом.
Указанные выше задачи и преимущества достигнуты с получением робота-пылесоса для выполнения работы по уборке помещения с использованием беспроводной связи со средством, находящимся снаружи от робота-пылесоса, содержащего основной корпус, снабженный всасывающим узлом для сбора пыли с очищаемого пола; приводной узел, расположенный на основном корпусе для приведения в действие множества колес; направленную вверх фотокамеру, расположенную в верхней части основного корпуса, для фотографирования изображений потолка в направлении, перпендикулярном направлению движения робота-пылесоса; датчик обнаружения препятствий, расположенный в передней части основного корпуса, для обнаружения любых препятствий, расположенных спереди от робота-пылесоса в направлении движения; запоминающее устройство для сохранения информации о местоположении препятствий, обнаруженных датчиком обнаружения препятствий; и блок управления для вычисления информации о местоположении препятствий для сохранения вычисленной информации о местоположении препятствия в запоминающем устройстве при приеме сигнала об обнаружении препятствия от датчика обнаружения препятствий, определения, отображает ли информация о местоположении препятствий, сохраненная в запоминающем устройстве, формирование замкнутой кривой, и продолжения управления приводным узлом для движения робота-пылесоса вдоль заданной траектории движения, при этом блок управления прекращает работу всасывающего узла, когда информация о местоположении препятствий отображает формирование замкнутой кривой.
Здесь информация о местоположении препятствий сохраняется в форме конфигурации элементов изображения видов, сфотографированных направленной вверх фотокамерой.
Указанные выше задачи и преимущества настоящего изобретения также достигнуты благодаря получению системы уборки помещения роботом, содержащей: робот-пылесос, включающий основной корпус, снабженный всасывающим узлом для сбора пыли с очищаемого пола, приводной узел, расположенный на основном корпусе, для приведения в действие множества колес, направленную вверх фотокамеру, расположенную в верхней части основного корпуса, для фотографирования изображений потолка в направлении, перпендикулярном направлению движения робота-пылесоса, и датчик обнаружения препятствий, расположенный в передней части основного корпуса, для обнаружения любых препятствий, расположенных спереди от робота-пылесоса в направлении движения; и средство дистанционного управления, сообщающееся беспроводной связью с роботом-пылесосом, при этом средство дистанционного управления сохраняет информацию о местоположении препятствия, обнаруженного датчиком обнаружения препятствий, и прекращает работу всасывающего узла робота-пылесоса, когда сохраненная информация о местоположении препятствия отображает формирование замкнутой кривой.
Предпочтительно, средство дистанционного управления содержит запоминающее устройство для сохранения информации о местоположении препятствия и дисплей для отображения изображений, сфотографированных верхней фотокамерой.
Дисплей отображает информацию о местоположении препятствий в виде конфигурации элементов изображения, имеющей первый индикационный символ, и отображает район, очищенный роботом-пылесосом, конфигурацией элементов изображения, имеющей второй индикационный символ, для ее отличия от конфигурации элементов изображения, обозначающих информацию о местоположении препятствий.
Способ управления роботом-пылесосом, имеющим датчик обнаружения препятствий, содержит следующие операции: определение того, работает ли датчик обнаружения препятствий в ходе работы по уборке помещения; сохранение информации о местоположении препятствий, когда датчик обнаружения препятствий работает; определение того, отображает ли сохраненная информация о местоположении препятствий формирование замкнутой кривой; и прекращение работы по уборке помещения, когда сохраненная информация о местоположении препятствий отображает формирование замкнутой кривой.
Как описано выше, при использовании робота-пылесоса, системы уборки помещения роботом-пылесосом и способа управления роботом-пылесосом блок управления определяет рабочий район посредством использования датчика обнаружения препятствий таким образом, чтобы робот-пылесос и система уборки помещения роботом-пылесосом могли независимо определять, завершена ли работа по уборке помещения.
При использовании системы уборки помещения роботом-пылесосом, соответствующей настоящему изобретению, дисплей средства дистанционного управления отображает очищенный роботом-пылесосом район таким образом, что пользователь может легко наблюдать продвижение работы по уборке помещения.
Дополнительные преимущества, задачи и признаки изобретения будут частично изложены в нижеследующем описании и частично будут выявлены специалистами в данной области техники при ознакомлении с нижеследующим, или они будут понятны при осуществлении изобретения на практике. Задачи и преимущества изобретения могут быть реализованы и достигнуты в соответствии с указанным в прилагаемой формуле изобретения.
Краткое описание чертежей
Изобретение будет подробно описано со ссылками на прилагаемые чертежи, на которых одинаковые ссылочные номера относятся к одинаковым элементам и на которых:
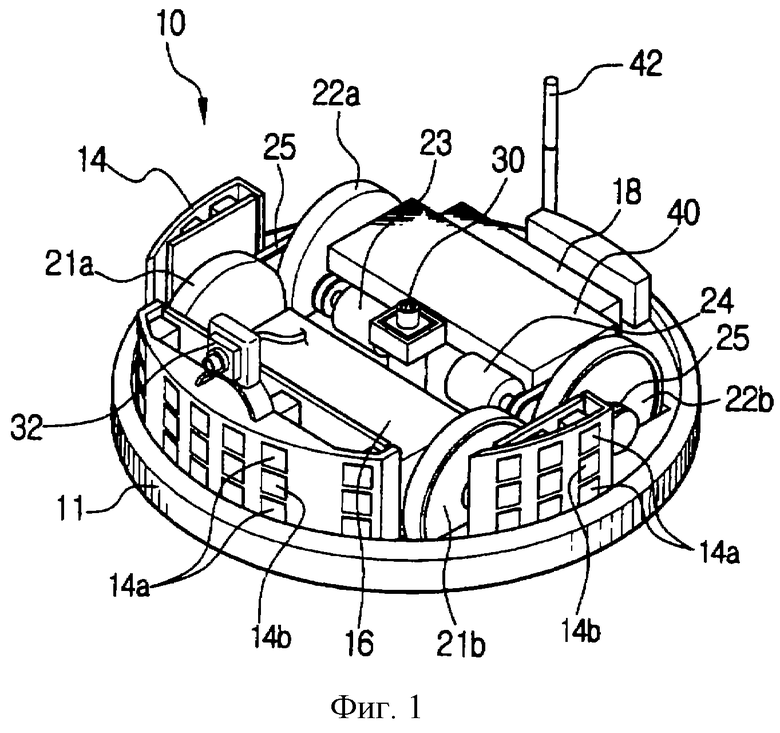
фиг.1 изображает перспективный вид, показывающий робот-пылесос, соответствующий настоящему изобретению, с удаленной верхней крышкой;
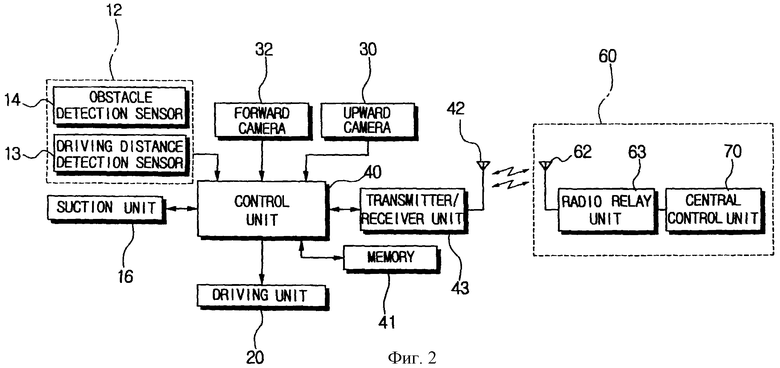
фиг.2 изображает блок-схему, показывающую систему уборки помещения роботом-пылесосом, соответствующую настоящему изобретению;
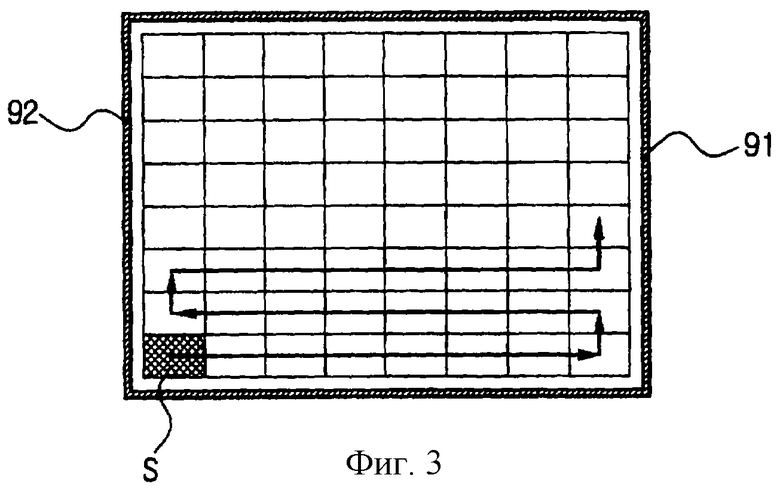
фиг.3 изображает вид сверху в плане рабочего района для иллюстрации того, как робот-пылесос обнаруживает препятствие при помощи датчика обнаружения препятствий и движется вдоль траектории движения;
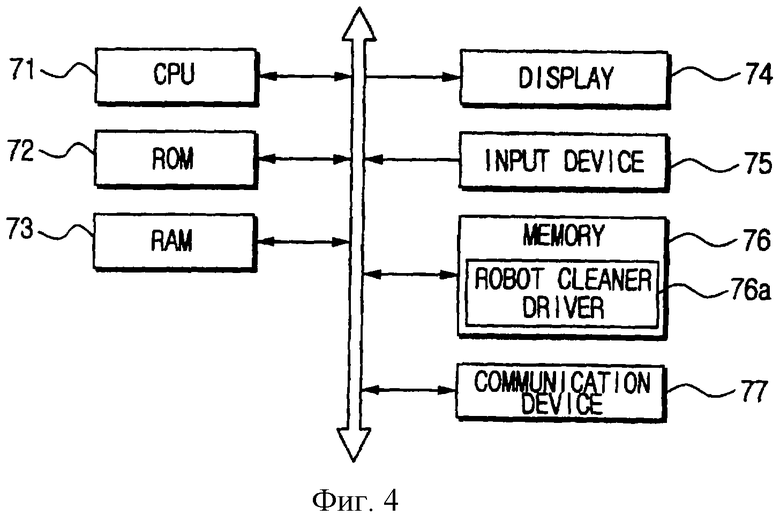
фиг.4 изображает блок-схему, показывающую деталь центрального устройства управления, показанного на фиг.2;
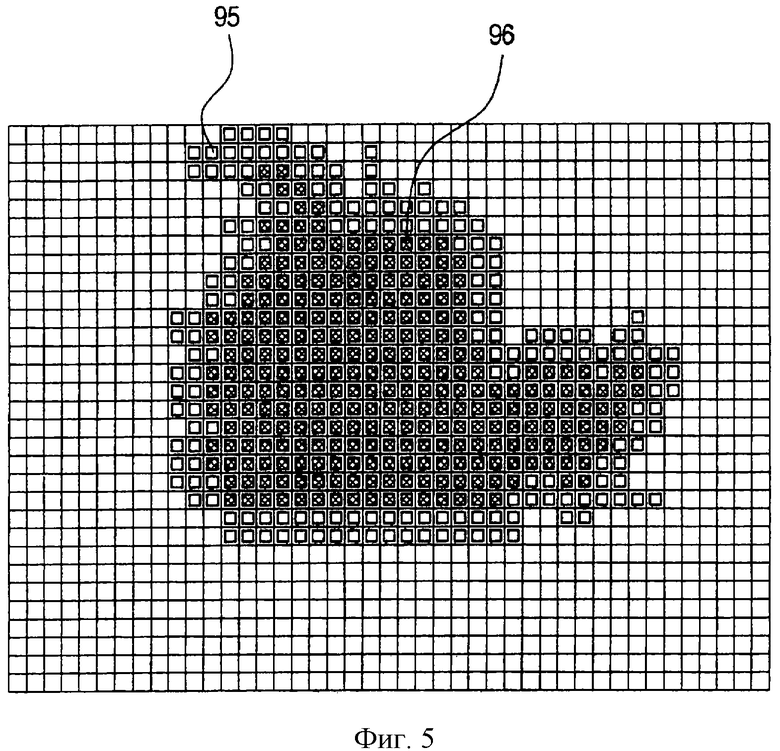
фиг.5 изображает вид, показывающий моментальный снимок экрана дисплея, показанного на фиг.4, когда робот-пылесос, соответствующий настоящему изобретению, завершает работу по уборке помещения в заданном рабочем районе;
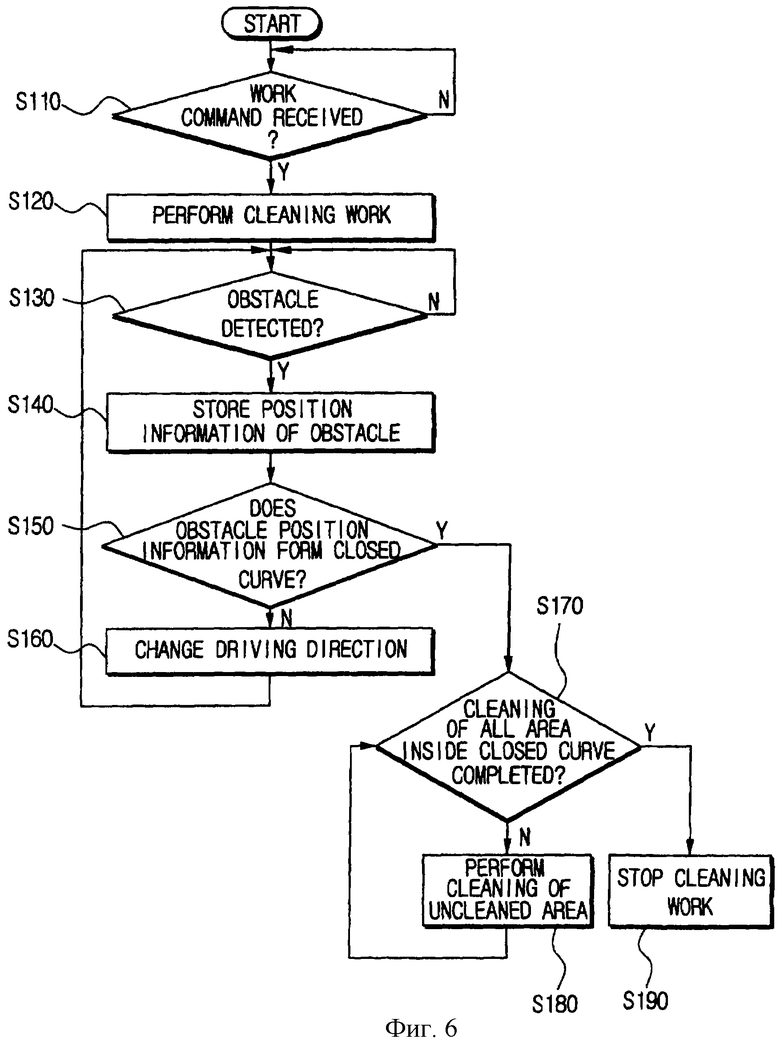
фиг.6 изображает блок-схему последовательности операций, показывающую способ управления роботом-пылесосом, соответствующий настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Далее будут описаны подробно со ссылками на прилагаемые чертежи предпочтительные варианты робота-пылесоса, системы уборки помещения роботом-пылесосом и способа управления роботом-пылесосом.
Как показано на фиг.1 и 2, робот-пылесос 10 содержит основной корпус 11, сенсорный блок 12, всасывающий узел 16, подзаряжаемую батарею 18, приводной узел 20, направленную вверх фотокамеру 30, направленную вперед фотокамеру 32, блок 40 управления, запоминающее устройство 41 и приемопередающее устройство 43 с антенной 42.
Сенсорный блок 12 содержит один или более датчиков 14 обнаружения препятствий, расположенных на цилиндрической боковой стенке основного корпуса 11 с заданными интервалами для посылки сигнала в окружающую среду и приема сигнала, отраженного объектами, находящимися снаружи от корпуса 11, и датчик 13 определения пройденного расстояния для измерения расстояний, пройденных роботом-пылесосом 10.
Датчик 14 обнаружения препятствий содержит множество элементов 14а излучения инфракрасных лучей для излучения инфракрасных лучей и элементов 14b приема света для приема инфракрасных лучей, при этом элементы расположены вдоль внешней окружности датчика 14 обнаружения препятствий перпендикулярно ориентированными парами. В другом случае датчиком 14 обнаружения препятствий может быть ультразвуковой датчик, способный излучать ультразвуковой сигнал и принимать отраженный ультразвуковой сигнал. Датчик 14 обнаружения препятствий также используется для измерения расстояния между роботом-пылесосом 10 и препятствием или ближайшей стеной.
Датчиком 13 определения пройденного расстояния (фиг.2) может быть датчик измерения угловой скорости для определения скорости вращения колес 21а, 21b, 22а и 22b, приводимых в действие электродвигателями 23, 24. Например, датчиком определения скорости вращения может быть шифратор для определения скорости вращения электродвигателей 23, 24.
Всасывающий узел 16 установлен на основном корпусе 11 для сбора пыли с очищаемого пола посредством всасывания воздуха. Всасывающий узел 16 может быть сконструирован многими хорошо известными способами. Например, всасывающий узел 16 может иметь всасывающий электродвигатель (не показан) и пылесборную камеру для приема воздуха, всасываемого через всасывающее окно или всасывающую трубу, сформированную против пола, очищаемого действием всасывающего электродвигателя.
Подзаряжаемая батарея 18 установлена на основном корпусе 11 для подачи электроэнергии электродвигателям приводного узла 20, в блок 40 управления, в сенсорный блок 12 и т.д.
Приводной узел 20 содержит два колеса 21а, 21b, расположенные на обеих сторонах передней части основного корпуса 11, и два колеса 22а, 22b, расположенные на обеих сторонах задней части основного корпуса 11, и электродвигатели 23, 24 для приведения во вращение задних колес 22а, 22b соответственно и зубчатый ремень 25 для передачи мощности, подаваемой на задние колеса 22а, 22b электродвигателями 23, 24, передним колесам 21а, 21b. Приводной узел 20 включает электродвигатели 23, 24, вращающиеся независимо по направлению вперед и назад в соответствии с управляющими сигналами, принимаемыми от блока 40 управления. Направление движения робота 10 может задаваться посредством управления электродвигателями 23, 24 так, чтобы они имели разные скорости вращения.
Направленная вперед фотокамера 32 установлена на основном корпусе 11 для фотографирования передних изображений при движении вперед и передачи сфотографированных изображений в блок 40 управления.
Направленная вверх камера 30 расположена на основном корпусе 11 таким образом, чтобы она могла фотографировать изображения расположенного сверху потолка и выдавать сфотографированные изображения в блок 40 управления.
Приемопередающее устройство 43 посылает информацию при помощи антенны 42 и передает сигналы, принятые антенной 42 в блок 40 управления.
Блок 40 управления обрабатывает принятые сигналы, поступающие через приемопередающее устройство 43. В случае, когда основной корпус 11 дополнительно содержит устройство кнопочного ввода (не показано), имеющее множество кнопок, которыми пользователь может манипулировать для ввода рабочих функций, блок 40 управления может обрабатывать входной сигнал, поступающий от устройства кнопочного ввода.
Блок 40 управления управляет роботом-пылесосом 10 для выполнения всасывающим узлом 16 работы по уборке помещения и сохраняет информацию, относящуюся к очищенному району, в запоминающем устройстве 41. Блок 40 управления также определяет, существует ли какое-либо препятствие на траектории движения робота-пылесоса 10, при помощи сигнала обнаружения, поступающего от датчика 14 обнаружения препятствий при движении робота-пылесоса 10, и вычисляет расстояние от робота-пылесоса до препятствия при обнаружении препятствия. После этого блок 40 управления сохраняет информацию о местоположении препятствия в запоминающем устройстве 41. Блок 40 управления затем управляет приводным узлом 20 для изменения направления движения робота-пылесоса 10 в соответствии с заданной траекторией движения и затем продолжает управлять роботом-пылесосом 10 для выполнения работы по уборке помещения. Когда при движении робота-пылесоса 10 обнаружено другое препятствие, блок 40 управления вычисляет информацию о местоположении препятствия и вновь сохраняет вычисленную информацию в запоминающем устройстве 41.
Затем блок 40 управления определяет, отображает ли сохраненная информация о местоположении препятствия формирование замкнутой кривой. Когда сохраненная информация о местоположении вычислена как отображающая сформированную замкнутую кривую, блок 40 управления определяет, полностью ли очищен район внутри замкнутой кривой. Когда операция уборки помещения завершена, блок 40 управления прекращает работу всасывающего узла 16 и завершает работу по уборке помещения.
Для определения, отображает ли информация о местоположении препятствия сформированную замкнутую кривую, могут использоваться различные известные способы. Например, в случае, когда изображение разделено на множество элементов изображения, и информация о местоположении препятствия сохраняется как информация о местоположении определенных элементов изображения, может быть принят способ, который определяет, соединены ли непрерывно друг с другом элементы изображения, соответствующие информации о местоположении препятствия.
Траектория движения робота-пылесоса может быть избрана пользователем произвольно таким образом, чтобы она была наиболее эффективна для выполнения необходимой определенной работы по уборке помещения, которая может быть, например, траекторией движения из стороны в сторону, как показано на фиг.3.
Далее со ссылками на пример рабочего района, имеющего прямоугольную форму и окруженного стенами, как показано на фиг.3, будет описана работа блока 40 управления, который определяет, завершена ли работа по уборке помещения с использованием датчика обнаружения препятствий. Здесь траектория движения робота-пылесоса является траекторией движения из стороны в сторону.
Робот-пылесос 10 включает всасывающий узел 16 и затем движется вперед из местоположения S пребывания в дежурном режиме при приеме командного сигнала начала работы от устройства кнопочного ввода или извне по беспроводной связи. В альтернативном варианте, работа по уборке помещения может осуществляться с временной последовательностью посредством автоматического выполнения операций по уборке помещения, если очищаемая поверхность не очищалась в течение заданного периода времени. При обнаружении правой стены 91 в ходе движения робота-пылесоса 10 датчик 14 обнаружения препятствий передает сигнал об обнаружении препятствия в блок 40 управления. При приеме сигнала обнаружения препятствия блок 40 управления вычисляет расстояние от робота-пылесоса 10 до препятствия и сохраняет информацию о местоположении препятствия в запоминающем устройстве 41. После этого робот-пылесос 10 поворачивает на 90° и движется на заданное расстояние, по существу соответствующее ширине всасывающего окна или всасывающей трубы всасывающего узла 16. Робот-пылесос 10 вновь поворачивает на 90° в том же направлении, в котором был выполнен предшествующий поворот, для возвращения в направлении, обратном предшествующему направлению движения, и определяет, существуют ли какие-либо препятствия спереди от робота-пылесоса 10. Когда впереди нет препятствий, робот-пылесос 10 движется прямо вперед или в соответствии с заданными командами, принятыми от блока 40 управления. Таким образом, робот-пылесос 10 разворачивается на 180° и движется в противоположном направлении для продолжения работы по уборке помещения, когда существует препятствие, такое как стена 91, показанная справа на фиг.3. При обнаружении левой стены 92 при движении робота-пылесоса 10 в обратном направлении датчик 14 обнаружения препятствий вновь передает сигнал в блок 40 управления. Блок 40 управления вычисляет расстояние от робота-пылесоса 10 до препятствия, такого как показанная здесь левая стена 92, и сохраняет информацию о местоположении препятствия в запоминающем устройстве 41. После этого робот-пылесос 10 поворачивает на 90° вправо или по часовой стрелке и проходит расстояние, соответствующее ширине всасывающего окна или всасывающей трубы всасывающего узла 16, и вновь поворачивает в том же направлении, как и при предшествующем повороте, на 90° для возвращения в направлении, обратном направлению предшествующего движения, и определяет, существует ли препятствие спереди от робота-пылесоса 10. Робот-пылесос 10 движется прямо вперед, когда впереди нет препятствий, но когда существует препятствие, такое как стена 92, робот-пылесос 10 поворачивает на 180° и движется в противоположном направлении. В этот момент блок 40 управления управляет приводным узлом 20 для повторения указанной выше операции, при этом каждый раз при обнаружении препятствия блок 40 управления сохраняет информацию о местоположении препятствия и определяет, отображает ли сохраненная информация о местоположении препятствия формирование замкнутой кривой.
Когда определено, что информация о местоположении препятствий не отображает формирование замкнутой кривой, блок 40 управления управляет приводным узлом 20 для продолжения выполнения работы по уборке помещения. Однако когда информация о местоположении препятствий отображает формирование замкнутой кривой, блок управления определяет, завершена ли работа по уборке помещения на всей площади внутри замкнутой кривой. Когда существует какая-либо площадь внутри замкнутой кривой, которая не была очищена, робот-пылесос 10 движется в этот район для выполнения работы по уборке. После этого блок 40 управления прекращает работу всасывающего узла 16 для завершения работы по уборке помещения, когда работа по уборке выполнена на всей площади внутри замкнутой кривой. Робот-пылесос 10 затем движется в другое помещение для выполнения работы по уборке или возвращается в местоположение S пребывания в дежурном режиме в соответствии с надлежащей командой.
Работа робота-пылесоса была описана на примере способа, согласно которому блок 40 управления непосредственно обрабатывает информацию для распознавания рабочего района и для определения того, когда работа по уборке помещения завершена.
Согласно другому аспекту изобретения получена система уборки помещения роботом, которая может обрабатывать данные относительно рабочего района вне робота таким образом, чтобы оповещать пользователя о рабочем районе и продвижении работы по уборке помещения, для уменьшения рабочей нагрузки, требуемой для выявления завершения работы по уборке помещения в рабочем районе самим роботом-пылесосом 10.
Для этого робот-пылесос 10 конфигурирован таким образом, чтобы он посылал средствами беспроводной связи сфотографированное изображение и сигнал обнаружения препятствия во внешнее средство управления и работал, реагируя на сигнал управления, принятый от внешнего источника команд. Средство 60 дистанционного управления конфигурировано таким образом, что оно беспроводным способом управляет движением робота-пылесоса 10. Средство 60 дистанционного управления содержит радиорелейное устройство 63 и центральное устройство 70 управления, показанные на фиг.2.
Радиорелейное устройство 63 обрабатывает радиосигнал, принимаемый от робота-пылесоса 10, и передает обработанный сигнал в центральное устройство 70 управления по проводам, а также передает сигнал, принятый от центрального устройства 70 управления, роботу-пылесосу 10 беспроводным способом при помощи антенны 62.
Центральным устройством 70 управления может быть компьютер обычной конфигурации, который показан на фиг.4 для примера. Как показано на фиг.4, центральное устройство 70 управления содержит центральный процессор 71, постоянное запоминающее устройство 72, оперативное запоминающее устройство 73, дисплей 74, устройство 75 ввода, запоминающее устройство 76 и устройство 77 связи.
Запоминающее устройство 76 снабжено средством 76а управления роботом-пылесосом для управления роботом-пылесосом 10 и для обработки сигналов, передаваемых роботом-пылесосом 10.
Когда средство 76а управления роботом-пылесосом приводится в действие, оно отображает для пользователя на дисплее 74 меню для установки режима управления роботом-пылесосом 10 и обрабатывает пункт меню, который выбрал пользователь, для приведения робота-пылесоса 10 в действие в соответствии с выбранным в меню режимом. Предпочтительно, меню может включать команду начала работы по уборке помещения и работу по наблюдению за помещением в качестве первичной классификации. Меню может также предлагать субменю, такие как перечень для выбора рабочего района и способы уборки, для каждой первичной классификации.
Средство 76а управления роботом-пылесосом использует принятое верхнее изображение и отметки, находящиеся на потолке, как сохраненную информацию для выявления текущего местоположения робота-пылесоса 10 и сохраняет в запоминающем устройстве 76 траекторию движения, по которой робот-пылесос 10 будет направлен с работающим всасывающим узлом 16, как очищенный район.
Когда датчик 14 обнаружения препятствий обнаруживает препятствие при движении робота-пылесоса 10 в район, который требуется убрать, блок 40 управления передает сигнал обнаружения препятствия в средство 60 дистанционного управления через приемопередающий блок 43. При приеме сигнала обнаружения препятствия средство 76а управления роботом-пылесосом (фиг.4) вычисляет расстояние от робота-пылесоса 10 до препятствия и сохраняет информацию о препятствии в запоминающем устройстве 76. Затем средство 76а управления роботом-пылесосом определяет, отображает ли сохраненная информация о препятствиях формирование замкнутой кривой, и управляет приводным узлом 20 таким образом, чтобы изменять траекторию движения робота 10 для продолжения работы по уборке помещения, когда сохраненная информация о местоположении препятствий не отображает формирование замкнутой кривой.
Предпочтительно, чтобы робот-пылесос 10 отображал местоположение препятствий и местоположение площади, на которой уборка завершена, на дисплее 74 для демонстрации пользователю местоположения препятствий и местоположения или площади, где уборка завершена. На фиг.5 показан пример указанной выше информации, отображаемой на дисплее 74.
Как показано на фиг.5, верхнее изображение, сфотографированное направленной вверх фотокамерой, отображается как фон на дисплее 74, на котором верхнее изображение поделено на множество элементов изображения, как показано. Когда обнаружено препятствие, средство 76а управления роботом-пылесосом вычисляет местоположение препятствия и отображает местоположение препятствия посредством изменения цветов элементов изображения на дисплее 74 в соответствии с вычисленным местоположением препятствия на определенный цвет. Кроме того, средство 76а управления роботом-пылесосом 10 вычисляет местоположение площади, пройденной роботом-пылесосом 10 при выполнении операции уборки помещения, и отображает местоположение очищенного района посредством изменения цветов элементов изображения на дисплее 74, соответствующих вычисленному чистому району, на определенный цвет. Здесь местоположения препятствий 95 и очищенного района 96 отображены разными определенными цветами. Например, местоположение препятствия 95 может отображаться красным цветом, тогда как местоположение очищенного района 96 может отображаться голубым цветом.
Средство 76а управления роботом-пылесосом определяет, формируют ли элементы изображения 95, представляющие препятствие, замкнутую кривую, каждый раз, когда средство 76а управления роботом-пылесосом отображает местоположение препятствий 95 на дисплее 74 конфигурацией элементов изображения. Когда элементы изображения 95, относящиеся к препятствию, формируют замкнутую кривую, средство 76а управления роботом-пылесосом устанавливает, завершена ли уборка всей площади внутри замкнутой кривой. Таким образом, если существует какой-либо район внутри замкнутой кривой, который еще не очищен, средство 76а управления роботом-пылесосом направляет робот-пылесос 10 в этот район для завершения работы по уборке помещения. После этого средство 76а управления роботом-пылесосом управляет роботом-пылесосом 10 для направления его в другой район или в заданное местоположение пребывания в дежурном режиме, реагируя на следующую команду, принятую от центрального устройства 70 управления. На фиг.5 показано, что элементы изображения 95, представляющие препятствие, формируют замкнутую кривую, и все элементы изображения 96 внутри замкнутой кривой представляют чистые районы, и, таким образом, можно видеть, что уборка рабочего района завершена.
Блок 40 управления робота-пылесоса 10 управляет приводным узлом 20, реагируя на управляющую информацию, принятую от средства 76а управления роботом-пылесосом через радиорелейное устройство 63, и, таким образом, можно уменьшать рабочую нагрузку для определения, завершена ли работа по уборке рабочего района, посредством использования информации о местоположении препятствий. Блок 40 управления также передает информацию о препятствии, обнаруженном датчиком 14 обнаружения препятствия, в центральное устройство 70 управления через радиорелейное устройство 63 при движении робота-пылесоса 10.
Далее будет подробно описан со ссылками на фиг.6 способ управления роботом-пылесосом 10 блоком 40 управления, который использует датчик обнаружения препятствий для определения, завершена ли работа по уборке в рабочем районе.
Сначала блок 40 управления определяет, принята ли команда начала работы, S110.
Когда команда начала работы принята, блок 40 управления начинает выполнять работу по уборке помещения посредством включения всасывающего узла 16 и управления приводным узлом 20 для движения по направлению вперед, S120.
Блок 40 управления затем определяет, принят ли сигнал обнаружения препятствия от датчика обнаружения препятствий, когда робот-пылесос выполняет работу по уборке помещения, S130.
При приеме сигнала обнаружения препятствия блок 40 управления вычисляет расстояние от робота-пылесоса 10 до препятствия и сохраняет информацию о местоположении препятствия в запоминающем устройстве, S140.
После этого блок 40 управления определяет, отображает ли информация о местоположении препятствий, сохраненная в запоминающем устройстве, формирование замкнутой кривой, S150.
Когда сохраненная информация о местоположении препятствий не показывает формирования замкнутой кривой, блок 40 управления управляет приводным узлом 20 для изменения направления движения робота-пылесоса 10, S160. В данный момент угол изменения направления движения зависит от траектории движения, которая может быть произвольно выбрана пользователем. Например, когда траектория движения является зигзагообразной траекторией или траекторией движения вперед-назад, робот-пылесос 10 поворачивает на 90° и продвигается вперед на заданное расстояние, после чего робот-пылесос 10 поворачивает на 90° в направлении, противоположном первоначальному направлению движения, для движения в направлении, противоположном предшествующему направлению движения. Когда в направлении движения обнаружено препятствие, робот-пылесос 10 поворачивает на 180° для движения в противоположном обратном направлении, противоположном предшествующему направлению движения. Предпочтительно, заданное расстояние между сегментами движения назад и вперед робота-пылесоса 10 здесь могут быть уже, чем длина всасывающего района всасывающего узла.
Блок 40 управления управляет роботом-пылесосом 10 для изменения направления движения и выполнения работы по уборке помещения и возвращается к операции S130 для определения, принят ли сигнал об обнаружении препятствия от датчика обнаружения препятствия. Когда спереди от робота-пылесоса в направлении движения обнаружено препятствие, информация о местоположении препятствия сохраняется в запоминающем устройстве, S140.
Когда информация о местоположении препятствия, сохраненная в ходе операции S140, отображает формирование замкнутой кривой, блок управления, после определения в ходе операции S150 принятия решения, определяет, завершена ли работа по уборке всего района внутри замкнутой кривой, S170. Когда существует какая-либо неубранная площадь внутри замкнутой кривой, блок 40 управления управляет приводным узлом для движения робота-пылесоса к неубранному району для выполнения работы по уборке, S180.
Далее, блок 40 управления прекращает работу всасывающего узла, когда блок 40 управления определяет, что работа по уборке внутри замкнутой кривой завершена, S190.
Затем блок 40 управления управляет приводным узлом для движения робота-пылесоса в заданное местоположение и пребывание в дежурном режиме до получения другой команды, когда блок управления не принимает любой другой команды незамедлительного действия.
Как описано выше, робот-пылесос, соответствующий настоящему изобретению, может выполнять работу по уборке помещения, независимо определяя рабочий район, без необходимости предварительного ввода информации о рабочем районе, а также может прекращать работу по уборке помещения, когда работа завершена. Кроме того, с использованием системы уборки помещения роботом, соответствующей настоящему изобретению, пользователь может наблюдать продвижение работы по уборке помещения благодаря тому, что робот-пылесос может отличительным образом отображать на дисплее убранные районы и неубранные районы. Таким образом, когда робот-пылесос повторяет работу по уборке одного и того же района, может быть приблизительно определено время завершения работы по уборке помещения. Кроме того, нет необходимости в движении робота-пылесоса вдоль контура рабочего района перед началом работы по уборке помещения, что таким образом уменьшает период времени, затрачиваемый на уборку помещения, а также снижает расход электроэнергии заряженной батареи.
Хотя изобретение было показано и описано со ссылками на некоторые предпочтительные варианты его осуществления, специалистам в данной области техники будет понятно, что в них можно внести различные изменения в форме и в деталях без отхода от сущности и объема изобретения, определенных в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ ДЕТЕКТОР ТЕЛА | 2005 |
|
RU2318652C2 |
| СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНОЙ СЕТИ СВЯЗИ | 2001 |
|
RU2212995C2 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| СИСТЕМА С МОБИЛЬНЫМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ ВЫСОКОЧАСТОТНОГО МОДУЛЯ | 2001 |
|
RU2210491C2 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| РОБОТ-ПЫЛЕСОС И СИСТЕМА РОБОТА-ПЫЛЕСОСА | 2003 |
|
RU2262878C2 |
| СПОСОБ ЗАРЯДКИ ОБСЛУЖИВАЮЩЕГО РОБОТА (ВАРИАНТЫ) | 2007 |
|
RU2350253C2 |
Робот-пылесос, система уборки помещения роботом и способ управления роботом позволяют независимо определять, завершена ли работа по уборке помещения, без предварительного ввода пользователем информации о рабочем районе, и оповещать пользователя о продвижении работы по уборке помещения в ходе выполняемой роботом-пылесосом работы. Робот-пылесос для выполнения работы по уборке помещения при помощи беспроводной связи с устройством, находящимся вне робота-пылесоса, содержит основной корпус, снабженный всасывающим узлом для сбора пыли с пола или очищаемой поверхности, приводной узел, расположенный на основном корпусе для приведения в действие множества колес, направленную вверх фотокамеру, расположенную в верхней части основного корпуса, для фотографирования изображений потолка в направлении, перпендикулярном направлению движения робота-пылесоса, датчик обнаружения препятствий, расположенный в передней части основного корпуса, для обнаружения препятствия, находящегося впереди от робота-пылесоса в направлении движения робота-пылесоса, запоминающее устройство для сохранения информации о местоположении препятствий и блок управления, выполненный с возможностью вычисления информации о местоположении препятствий для сохранения вычисленной информации, о местоположении препятствий в запоминающем устройстве при приеме сигнала об обнаружении препятствия от датчика обнаружения препятствий, с возможностью определения, отображает ли информация о местоположении препятствий, сохраненная в запоминающем устройстве, формирование замкнутой кривой, и возможностью управления приводным блоком для движения робота-пылесоса по заданной траектории движения, при этом блок управления выполнен с возможностью прекращения работы всасывающего узла, когда информация о местоположении препятствий отображает формирование замкнутой кривой. Система уборки помещения роботом содержит робот-пылесос, средство дистанционного управления, приспособленное для беспроводного сообщения с роботом-пылесосом и выполненное с возможностью сохранения информации о местоположении препятствий, обнаруженных датчиком обнаружения препятствий, и прекращения работы всасывающего узла робота-пылесоса, когда сохраненная информация о местоположении препятствий отображает формирование замкнутой кривой. Согласно способу управления роботом-пылесосом, имеющим датчик обнаружения препятствий, определяют, работает ли датчик обнаружения препятствий в ходе работы по уборке помещения, и сохраняют информацию о местоположении любых препятствий, когда датчик обнаружения препятствий работает, осуществляют определение того, отображает ли сохраненная информация о местоположении препятствий формирование замкнутой кривой, и прекращают уборку помещения, когда сохраненная информация о местоположении препятствий отображает формирование замкнутой кривой. 3 н. и 5 з.п. ф-лы, 6 ил.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5787545 A, 04.08.1998 | |||
| Устройство для контроля блоков управления | 1981 |
|
SU1003088A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| МОБИЛЬНЫЙ ПЫЛЕОТСАСЫВАЮЩИЙ АППАРАТ | 1992 |
|
RU2019120C1 |

