Изобретение относится к способам и устройствам управления самолетом. Задачей, на решение которой направлено заявляемое изобретение, является повышение безопасности маневрирования самолета за счет введения в систему управления тангажем самолета (рулем высоты, поворотными реактивными соплами двигателей самолета, вектором тяги двигателей самолета или иными рулевыми органами, управляющими тангажем самолета или его углом атаки) дополнительного корректирующего устройства. (Далее будет применяться сокращенная форма описания органа управления - руль высоты вместо руль высоты, поворотные реактивные сопла двигателей самолета, вектор тяги двигателей самолета, или иные рулевые органы, управляющие тангажем самолета или его углом атаки.) Корректируя сигнал управления рулем высоты, оно позволяет системе управления быстро и точно вывести самолет на предельно допустимый угол атаки (α макс) в случае необходимости.
Способ ограничения угла атаки и перегрузки летательного аппарата отличается тем, что на управляющий сигнал системы управления рулем высоты летательного аппарата, идущий от органа управления, который управляет материальным объектом - рулем высоты летательного аппарата, вводят ограничение с упреждением до момента выхода летательного аппарата на максимальный угол атаки, при этом величину упреждения вычисляют по принципу передаточной функции - инерционное звено первого порядка, входящий сигнал которого - величина, пропорциональная угловой скорости руля высоты или органа управления системы управления рулем высоты летательного аппарата, а выходящий - величина упреждения, причем после снятия упреждения на управляющий сигнал, последний получает возможность своего изменения до значения, соответствующего предельно допустимому углу установки руля высоты, которое соответствует максимально допустимому углу атаки на установившемся режиме полета, при котором угол атаки не изменяется и полностью уравновешен, соответствуя заданному рулем высоты максимальному значению.
Устройство ограничения угла атаки летательного аппарата отличается тем, что в состав системы управления рулем высоты летательного аппарата включено корректирующее устройство, вводящее ограничение на управляющий сигнал с упреждением, а величина упреждения вычисляется в корректирующем устройстве по принципу передаточной функции - инерционное звено первого порядка, входящий сигнал которого - величина, пропорциональная угловой скорости руля высоты или органа управления системы управления рулем высоты летательного аппарата, а выходящий - величина упреждения; и устройства, позволяющие корректирующему устройству изменять сигнал управления, например, суммирующие устройства, упорные устройства или исполнительные устройства, влияющие совместно с корректирующим устройством на систему управления рулем высоты летательного аппарата, ограничивая сигнал управления, который, в свою очередь, ограничивает перемещение руля высоты летательного аппарата.
Кроме того, заявляемое устройство отличается тем, что оно получает параметр, пропорциональный угловой скорости руля высоты летательного аппарата или угловой скорости органа управления рулем высоты летательного аппарата, от датчиков этих величин, связанных с органом управления или рулем высоты или с любым элементом системы управления рулем высоты летательного аппарата, являющимся проводником управляющего сигнала.
Перечень чертежей:
Фиг.1: Структурно-функциональная схема вычислителя передаточной функции величины упреждения Δ δ (величина упреждения Δ δ - это угол отклонения руля высоты Δ δ , пропорциональный величине Δ α 2 - предстоящего инерционного отклонения угла атаки α выше заданного значения α заданное (см. фиг.6)).
1. Суммирующий блок (С).
2. Блок произведения (умножитель) N1 (У1).
3. Блок произведения (умножитель) N2 (У2).
4. Блок интегрирующего звена (И3).
5. Блок произведения (умножитель) N3 (У3).
6. Блок произведения (умножитель) N4 (У4).
7. Вычислитель передаточной функции (ВП).
Фиг.2: Структурно-функциональная схема вычислителя величины упреждения Δ δ (ВВУ).
8. Программное устройство (ПРУ).
9. Вычислитель коэффициента усиления (ВКУ).
10. Вычислитель коэффициента обратной связи (ВОС).
11. Вычислитель промежутка времени τ (ВВ).
12. Дифференцирующее устройство (ДУ) можно не применять, если на вход ВП подается параметр δ ’(t), равный угловой скорости руля высоты.
12а) Необязательное преобразующее устройство (НПУ), пропускающее только отрицательные значения Δ δ .
13. Вычислитель величины упреждения (ВВУ).
Фиг.3: Структурно-функциональная схема системы управления рулем высоты самолета с применением корректирующего устройства:
14. Вычислитель величины предельного отклонения руля высоты (ВПО).
15. Сумматор корректирующего устройства (СКУ).
16. Преобразующее устройство (ПУ), пропускающее только отрицательные значения Δ δ к - величины коррекции.
17. Корректирующее устройство (КУС).
18. Орган управления (ОУ) в системе продольного управления самолетом (по тангажу) (штурвал, ручка управления самолетом).
19. Датчик положения органа управления (ДОУ).
20. Суммирующее устройство системы управления (СУС).
21. Исполнительное устройство (гидроусилитель, бустер, автономная рулевая машина и т.д.) (ИУ).
22. Руль высоты самолета (РВ).
Фиг.4: Схема вычислителя величины предельного отклонения руля высоты δ max.
23. Функциональный блок, воспроизводящий нелинейную функцию δ max1 (Б1).
24. Вычислитель значения δ mах2 (Б2).
25. Сравнивающее устройство (СУ), выбирающее минимальное (максимальное по модулю) значение из параметров δ max1 и δ mах2.
Фиг.5: Структурная схема системы управления рулем высоты самолета с применением корректирующего устройства:
26. Датчик угла атаки или система определения угла атаки (ДУА).
27. Система воздушных сигналов или централь скорости и высоты или бортовой компьютер или иная система, обрабатывающая данные о высоте и скорости полета (СВС).
28. Система топливомера и/или сигнализаторы наличия груза на самолете и/или задающее устройство количества груза на самолете (СТ).
29. Приемник воздушного давления (ПВД).
Фиг.6: График процесса вывода угла атаки самолета α на предельно допустимое значение.
Фиг.7: Схема системы управления рулем высоты самолета с применением корректирующего устройства, выполненного в одном корпусе с СУС:
30. Корректирующее устройство (КУС), выполненное в одном корпусе с СУС.
Фиг.8: Схема системы управления рулем высоты с применением корректирующего устройства, выполненного в одном корпусе с СУС.
Фиг.9: Алгоритм программы для бортового компьютера. Этапы программы.
31. Получение бортовым компьютером (БК) от систем самолета параметров числа М полета, давления воздуха на высоте полета РII, массы топлива на самолете mT, массы груза mГ, скорости полета V, угла атаки α , углового положения органа управления (штурвала и т.д.), задающего положение руля высоты δ , первой производной от параметра δ , производных от параметра α , сигналов от концевых выключателей, от топливомерной системы и других параметров полета.
32. Вычисление параметров коэффициента усиления передаточной функции ограничителя К, его постоянной времени Т, величины упреждения Δ δ , длительности временного промежутка τ , максимально-допустимых углов отклонения руля высоты δ max1 и δ max2 и синхронизация программы.
33. Сравнение величин δ max1 и δ max2.
34. Выбор значения δ max из δ max1 и δ max2.
35. Вычисление величины δ +Δ δ -δ max.
36. Определение знака величины δ +Δ δ -δ max и определение режима работы устройства согласно условиям в таблице 1. В зависимости от режима определяется коэффициент усиления передаточной функции К и ее постоянная времени Т в соответствии с таблицей 2.
37. Выдача (изменение) в СУС 20 сигнала Δ δ к (отрицательного или равного нулю) и переход в начало программы.
Фиг.10: Схема механической системы управления самолетом (рулем высоты).
38. Механическое исполнительное устройство (МИУ).
39. Концевой выключатель (KB).
40. Упорное устройство (УУ).
41. Шток механического исполнительного устройства (ШУ).
42. Упор упорного устройства (У).
Состав и взаимные связи элементов выглядят следующим образом.
Заявляемое устройство включает типовой набор элементов системы управления самолетом от штурвала до руля высоты и присоединенные к системе корректирующее устройство управляющего сигнала 17 и суммирующее устройство 20 для электродистанционной проводки управления (фиг.3). Или корректирующее устройство управляющего сигнала 17 и механическое исполнительное устройство 38, воздействующее на присоединенное к проводке механической системы управления упорное устройство 40 (фиг.10).
Корректирующее устройство 17 (фиг.3) имеет в своем составе вычислитель величины упреждения 13, вычислитель предельного отклонения руля высоты 14, сумматор корректирующего устройства 15, преобразующее устройство 16. Все элементы взаимно связаны друг с другом согласно фиг.3. Вычислитель величины упреждения 13 состоит из следующих частей: ВП 7, ПРУ 8, ВВ 11, ВКУ 9, ВОС 10 и необязательных элементов ДУ и НПУ (фиг.2). Если ВП получает параметр δ -угол установки РВ от соответствующих датчиков положения руля высоты или от датчика положения штурвальной колонки (расположенных на любом из проводящих управляющий сигнал δ элементах системы управления), то его необходимо дифференцировать в ДУ 12 для получения производной δ ’(t), которую следует подавать на вход ВП 7. Если ВП получает параметр δ ’(t) от соответствующих датчиков, расположенных на любом из проводящих управляющий сигнал δ элементах системы управления, то его следует подавать на вход ВП 7 без преобразований в ДУ. Для повышения надежности системы можно применить элемент НПУ 12а, который пропускает только отрицательные значения параметра Δ δ - величины упреждения. Все элементы ВВУ взаимно связаны в соответствии с фиг.3.
ВП 7 (фиг.1) состоит из элементов С (позиция 1), У1 (позиция 2), У2 (позиция 3), И3 (позиция 4), У3 (позиция 5), У4 (позиция 6). Все элементы ВП взаимно связаны в соответствии с фиг.1.
ВПО 14 (фиг.4) состоит из элементов Б1 (позиция 23), Б2 (позиция 24), СУ (позиция 25). Все элементы ВПО взаимно связаны в соответствии с фиг.4.
КУС 17 (фиг.10), работающий совместно с механической проводкой, связан с МИУ 38, которое имеет шток 41 с расположенным на нем KB 49. В систему управления рулем высоты включено упорное устройство 40, которое может взаимодействовать с МИУ согласно этому описанию.
КУС 17 (фиг.5) в любом исполнении может иметь связь с ДУА 26 для получения параметра угол атаки α , с СВС 27 для получения параметров полета, с СТ 28 для получения параметров массы топлива и груза на борту самолета. СВС 27 связано с ПВД 29.
Электродистанционная система управления может иметь следующие элементы: ОУ 18, ДОУ 19, СУС 20, ИУ 21, РВ 22, соединенные между собой согласно фиг.5.
Механическая система управления может иметь следующие элементы: ОУ 18, УУ 40, ИУ 21, РВ 22, соединенные между собой согласно фиг.10.
С учетом настоятельных требований сотрудников ФИПС относительно описания связей элементов, привожу следующие данные. Ниже приводится перечень элементов проводки (системы) управления (ЭПУ) тангажем (или рулем высоты) самолета в случае механической системы управления летательным аппаратом (СУЛА). (Самолет - это летательный аппарат (ЛА)). ОУ может быть представлен в виде штурвала и/или штурвальной колонки и/или ручки управления самолетом и/или автомата управления (АУ) (если такой имеется) (автопилота).
В случае применения с механической проводкой (системой) управления (фиг.10) ОУ механически последовательно связан при помощи известных соединительных элементов (СЭ), таких как: болтов, гаек, шплинтов, шпилек, кронштейнов, проушин, шестерен, ползунов, цепных передач, винтовых передач, редукторов, валов, тяг и т.д. (далее (СЭ)) с последовательно соединенными в любой последовательности ЭПУ: тяги, качалки, валы, люнеты, кронштейны, цепи, тросы, шестерни, рычаги и т.д. ЭПУ передают при помощи механического перемещения (МП) (линейного, вращательного, поступательного и т.д.) управляющий сигнал δ (УС) на УУ 40. УУ может быть выполнено в виде любого элемента (набора элементов) из списка, относящегося к выше разъясненному понятию ЭПУ с установленным на нем упором, либо с присоединенным к нему рычагу с упором, либо качалки с упором и т.д. (Соединение упора с этим элементом может быть при помощи СЭ или сварки, спайки, склейки и др.). УУ последовательно механически связано при помощи СЭ с ЭПУ спереди и сзади (с обоих концов) (т.е. с двух сторон). ЭПУ, следующие за УУ, передают МП на ИУ 21 (если оно установлено): бустер, гидроусилитель, электропривод, электроподъемник, автономная рулевая машина, гидропривод, пневмопривод или их комбинации и т.д. Далее ИУ связано механически при помощи СЭ со следующими за ним ЭПУ. В случае отсутствия в СУЛА ИУ, ЭПУ связаны со следующими за ними ЭПУ при помощи СЭ. ЭПУ соединены последовательно друг с другом и последний из них связан при помощи СЭ с рулем высоты (РВ) 22. Таким образом, все ЭПУ последовательно связаны между собой при помощи СЭ и образуют схему последовательно связанных элементов: ОУ, ЭПУ, УУ, ИУ и/или ЭПУ, РВ.
Все ЭПУ установлены на летательный аппарат и связаны с ним при помощи таких крепежных элементов КЭ, как: СЭ, люнеты, кронштейны, рычаги, подшипники, болты, винты, заклепки, шплинты, гайки и т.д. Они обеспечивают одну степень свободы для МП этих элементов, обеспечивающих прохождение УС по СУЛА. Добавлю, что на ОУ воздействует летчик (человек), связанный с ним при помощи кисти руки летчика путем зажатия его между пальцев руки. Летчик связан с ОУ только во время полета и движения самолета по земле. Если ЛА беспилотный, то функции летчика выполняет автоматическое устройство (АУ), механически связанное с ЭПУ, заменяя летчика и ОУ в вышеприведенной схеме и образуя новую схему последовательно связанных элементов: автоматическое устройство, ЭПУ, УУ, ИУ и/или ЭПУ, РВ.
Если СУЛА электрическая или электронная, то АУ может быть связан с проводами (электропроводящими, изолированными друг от друга) такой СУЛА при помощи штепсельных разъемов ШР.
Для электрической или электронной СУЛА (ЭСУЛА) ОУ связан (механически при помощи СЭ и ЭПУ) последовательно с ДОУ, который преобразует МП ОУ в электрический или электронно-цифровой УС δ в виде напряжения либо частоты тока, либо в виде электронно-битовой цифровой информации.
В качестве ДОУ можно использовать: потенциометрические, индуктивные, индукционные датчики, микросин, емкостные, импульсные датчики, преобразующие МП в электрический сигнал, электромеханические цифровые приборы, аналогово-цифровые преобразователи и другие преобразователи МП в электрический (Э) или электронно-цифровой (ЭЦ) сигнал, или их аналоги и/или их комбинации. Например, как у самолета F-22. Например, потенциометрический или индукционный или емкостной датчик, связанный с аналогово-цифровым преобразователем, в результате чего МП ОУ преобразуется в цифровой код, битовое (или цифровое) значение которого пропорционально МП ОУ.
ДОУ связан при помощи ШР, к которым подводятся из ДОУ выходной УС, с электропроводящими ЭПУ: электропроводящие изолированные металлические провода (проводники электрического (Э) тока).
(Все ЭПУ, передающие без преобразования УС независимо от типа УС (механический, Э или ЭЦ), в данном описании обозначаются как ЭПУ.) Следующие за ДОУ ЭПУ соединены при помощи ШР с корректирующим устройством (КУС) и могут быть соединены с СУС (согласно фиг.3, 5, 7, 8). ЭПУ на этих фигурах изображены в виде стрелок.
КУС может быть выполнен в виде бортового компьютера (БК) (фиг.7) или его части, или Э или ЭЦ блока (ЭБ), построенного на полупроводниковых, электроламповых элементах и/или микросхемах. КУС соединено при помощи ШР к следующими за КУС ЭПУ. По этим ЭПУ УС передается на ИУ, с которыми они соединены при помощи ШР, в котором УС преобразуется в МП штока ИУ. В Э или ЭЦ СУЛА (или ЭПУ) УС не МП, а Э или ЭЦ УС (ЭУС) (электро или электронно-цифровой управляющий сигнал). Поэтому ИУ преобразует УС не из вида МП, а из вида ЭСУ в МП штока или вала ИУ. Каждое ИУ имеет шток или вал, совершающий МП, пропорциональное величине УС. Например, гидроусилители самолета F-22. К ИУ при помощи СЭ присоединены механические ЭПУ, соединенные с РВ при помощи СЭ. Все вышеперечисленные элементы закреплены на самолете (имеют связь) при помощи КЭ, СЭ, хомутов, винтов, нитки-макей и т.д. Все ЭПУ (механические ли, Э или ЭЦ) соединены последовательно друг с другом от ОУ до РВ и закреплены на самолете, образуя цепь элементов. Однако, допускается дублирование ЭПУ путем параллельного соединения с таким же ЭПУ. Количество параллельных элементов не ограничено. Например, от ДОУ до КУС и от КУС до ИУ можно проложить не один электропровод, а 2, 3, 4, 10, 128, 365 и т.д. (параллельно). В Э или ЭЦ СУЛА КУС не обязательно должно быть связано непосредственно с ЭПУ, идущими от ДОУ. Если СУС 20 не входит в состав КУС фиг.3, то ЭПУ, следующие за ДОУ, связаны при помощи ШР с СУС и при помощи ШР с КУС (вернее с входящим в состав КУС СКУ 15).
Таким образом, СУС должен иметь 3 соединения через 3 ШР или без ШР: с ЭПУ, следующими от ДОУ, с ЭПУ, следующими к ИУ и ВВУ, с ЭПУ, связывающими ПУ и СУС. Кроме того, ЭПУ, следующие от ДОУ, должны иметь соединение (при помощи ШР) с СКУ, входящим в состав КУС.
В качестве СУС можно использовать магнитные усилители, суммирующий блок на основе операционных усилителей, электронные усилители, потенциометрические схемы, поляризованные реле, мостиковые схемы, суммирующий блок на основе микросхем или аналоговых элементов, арифметические устройства для цифровых БК, суммирующие блоки, выполненные отдельно от БК, арифметические устройства, выполненные отдельно от цифрового БК. Для механической СУЛА с механическими ЭПУ УУ имеет упор, который связан с УУ жестко или на шарнире. Если упор на шарнире, то он выполнен в виде качалки на кронштейне, благодаря чему, каждому новому положению ЭПУ будет соответствовать только одно новое положение упора. Упор УУ взаимодействует с МИУ, которое не связано с УУ. Оно имеет выдвижной шток с упором, либо вращаемый вал с упором, который при необходимости может упираться в упор УУ. МИУ закреплено на самолете при помощи КЭ. Оно может быть электродвигателем при помощи червячной, ползунковой, цепной или иной связи с использованием редуктора или без него, перемещающим вал или шток, шестерню, цепь или иное устройство с расположенным на нем (ней) упором. (Например, широко используемый в авиации механизм МП-100.)
Все эти элементы образуют МИУ и механически с ним (или с его корпусом) связаны. МИУ может быть электрогидроприводом, перемещающим любой из вышеперечисленных элементов (шток, вал и т.д.).
МИУ связан при помощи ШР с электропроводами, связанными при помощи ШР с корректирующим устройством КУС 17 (фиг.10). На штоке (вале и т.д.) МИУ устанавливается связанный со штоком МИУ концевой выключатель KB 39. При упирании штока (вала и т.д.) МИУ в упор УУ замыкается электрическая цепь КВ. Эта Э цепь связана с KB и с КУС Э проводниками при помощи ШР или спайки или другими известными токопроводящими способами. В итоге любая СУЛА независимо от типа является проводником УС, идущего от ОУ к РВ (через элементы, принадлежащие СУЛА и передающие друг другу УС). УС передается от одного ЭПУ к другому ЭПУ и может искажаться (корректироваться) только в СУС или на УУ в зависимости от типа СУЛА. Кроме того, к СУЛА могут быть присоединены механическим или другим способом, или при помощи КЭ или СЭ к любому из перечисленных выше устройств любые применяемые в авиации устройства.
Например: к ОУ или ЭПУ могут быть присоединены пружинные загрузочные устройства, имитирующие аэродинамическую нагрузку, с целью создания у летчика ощущения физических усилий на штурвале. Например, к СУЛА могут быть присоединены механизмы триммерного эффекта, имитирующие изменение нагрузки на штурвале. Например, к ЭПУ могут быть присоединены механизмы изменения передаточных чисел СУЛА, с целью изменения передаточных чисел СУЛА в зависимости от высоты и скорости полета. Например, к ЭПУ могут быть присоединены автоматы повышения устойчивости, корректирующие УС в зависимости от изменения угла атаки, или демпферы, корректирующие УС, в зависимости от угловой скорости вращения самолета. Например, к ЭПУ могут быть присоединены устройства автопилота, корректирующие или задающие УС в зависимости от режима работы автопилота (например, рулевые машины автопилота, например, исполнительные механизмы автопилота, например, суммирующие устройства), присоединенные как описано выше для СУС к ЭПУ и от ЭПУ к автопилоту при помощи изолированных электропроводящих проводов, электрически связанных с сумматором и автопилотом, т.е. передающих электрические сигналы от автопилота к сумматору автопилота, связанного с ЭПУ. Кроме того, все ЭПУ механической СУЛА могут быть сделаны из металла или других прочных материалов на основе любых химических элементов, перечисленных в таблице Менделеева, и/или их комбинаций в любых пропорциях по желанию конструктора. Форма, цвет, запах, вкус и взаимное положение этих элементов значения не имеют.
При передаче аналоговых Э сигналов от устройств, датчиков и т.д. к ЭЦ устройствам, БК и т.д. и от ЭЦ устройств, БК к аналоговым устройствам, датчикам и т.д. используются аналогово-цифровые (или цифроаналоговые) преобразователи (АЦП). АЦП применяются так же при использовании электронно-вычислительных машин (ЭВМ). Набор ЭПУ от ОУ до РВ, включающий также еще и все вышеперечисленные элементы (ОУ, ЭПУ, ДОУ, СУС, ИУ, РВ, УУ и т.д.), в этом описании называется проводкой управления.
Для своей работы КУС может получать все или некоторые из следующих параметров: М (число Маха) полета, Рп - атмосферное давление за бортом самолета, δ ’(t) - производная от УС (угловая скорость руля высоты или штурвала или сигнал, ей пропорциональный) или δ (t) - УС (угловое положение руля высоты или штурвала или сигнал, ему пропорциональный), α (t) - угол атаки, V - скорость полета, ρ - плотность воздуха, mг - масса груза, mт - масса топлива.
В связи с тем, что устройство может быть рассчитано на типовой режим полета и на типовую загрузку, то оно может обойтись и без большинства этих параметров. Например без Рц, М, mт, mг, V, ρ , α . Параметр δ ’(t) можно получать дифференцированием параметра δ (t). Параметр δ (t) КУС может получать от связанных с ним датчиков, установленных на самолете при помощи КЭ или иным способом и связанных механически при помощи КЭ или иным способом (например: приклеены, приварены, вставлены в специальные пазы и т.д.) с ОУ, РВ или ЭПУ. Параметр δ КУС может получать от БК, пилотажно-навигационного комплекса ПНК, от ДОУ, от электрических проводов (ЭП), идущих от ДОУ к СУС, СКУ или к КУС. Для получения этого параметра КУС связано с любым из вышеперечисленных датчиков (которые могут быть любого типа, как будет указано ниже или как указано для датчиков ДОУ, например: потенциометрический, индукционный, емкостный, импульсный и т.д.), элементов, устройств, ПНК, ЭВМ при помощи электрических проводов через ШР или без ШР. Если КУС - цифровая ЭВМ или БК, а параметр, идущий от вышеупомянутого любого элемента - аналоговый, то электропровода связаны с этим элементом и АЦП через ШР или без них. АЦП связан электропроводами с КУС через ШР или без них. Таким образом, вышеупомянутый элемент связан проводами с АЦП, а АЦП связан проводами с КУС. Например: ДОУ или потенциометрический датчик, связанный с ОУ, или индукционный датчик, связанный с механическим ЭПУ, связан электропроводами с АЦП через ШР, а АЦП через ШР - с КУС. В качестве датчиков параметра δ можно использовать любое из перечисленных в вышерасписанном списке для датчиков ДОУ устройств. Например: потенциометрический, индуктивный, емкостный, индукционный датчик, импульсный и т.д. Все или любые электропровода, устройства и датчики, упомянутые в данном описании, могут соединяться друг с другом без применения ШР при помощи спайки (горячей или холодной) и т.д. Параметр δ (или δ (t)) КУС получает от ПНК, бортовой ЭВМ или прочего, только в том случае, если эти устройства этот параметр имеют. Для получения δ (t) (или δ ) эти устройства сами должны быть связаны электрическими проводами с датчиками δ (t), расположенными в любых, уже перечисленных местах. Эти датчики могут быть любых перечисленных типов.
Кроме параметра δ (t), КУС может получать параметр δ ’(t) от датчиков, установленных на самолете и связанных при помощи КЭ, приваренных, приклеенных, вставленных в пазы и т.д. с ОУ или ЭПУ или ИУ или РВ. Датчик параметра δ ’(t) (или δ ’) может быть связан с ОУ или ЭПУ или ИУ или РВ при помощи тяг, качалок, шестеренчатой передачи, цепной передачи, червячной передачи, ползунковой передачи, шлицевой передачи и т.д. В качестве датчика δ ’(t) можно использовать тахогенератор или иное известное устройство для преобразования МП в электрический или электронно-цифровой сигнал, пропорциональный производной от МП. При этом датчик δ ’(t) связан электрическими проводами через ШР с КУС. Если КУС - цифровое, то датчик δ ’(t) связан электропроводами с АЦП через ШР, а АЦП электропроводами с КУС через ШР.
Пример: Вал РВ или механический ЭПУ или штурвал связан через шестеренчатую передачу, червячную, ползунковую, при помощи тяги, качалки, вала, цепи, их комбинаций и т.д. с валом тахогенератора или иного датчика δ ’(t). Этот датчик связан электропроводами с АЦП через ШР. АЦП через ШР связан с КУС (цифровым). Если КУС аналоговый, то электропровода от датчика идут напрямую к КУС.
Любые соединения в этом описании могут не использовать ШР. Вместо них Э сигналы могут передаваться любым другим токопроводящим способом. Например, через спаянные провода или по Э проводящим дорожкам на плате или от ножек микросхемы, впаянной в специальную плату к Э проводящим каналам, образующим на этих самых платах многочисленные параллельные дорожки, называемые шинами (Например, шина PCI или ISA или AGP), на платах специальных счетно-решающих приборов, называемых за границей (в развитых странах) компьютерами.
Во всех указанных в описании связях не исключается использование промежуточных усилителей сигнала. Это правило распространяется на все описание. В случае их применения усилители должны быть связаны с электропроводами. В электрических СУЛА есть еще одна возможность получения параметра δ (t) или δ ’(t) устройством КУС, так как КУС может быть связано с электрическими ЭПУ. ЭПУ являются проводником УС. УС - это δ (t) (или пропорционален δ (t)).
Если КУС связано с ЭПУ через СУС, то оно может получать δ (t) прямо от ЭПУ или ДОУ, так как ЭПУ или ДОУ являются проводниками параметра δ (t). Для этого КУС должен быть связан через ШР при помощи электропроводов с ЭПУ или ДОУ и использовать его в качестве датчика.
Если КУС связано с ЭПУ напрямую, а не через СУС, то оно и так получит параметр δ (t) от ДОУ (фиг.7). В случае, если КУС получает δ (t) от датчика или устройства или ЭПУ, то оно может дифференцировать этот параметр внутри себя для получения δ ’(t). В этом случае получение параметра δ ’(t) от других датчиков или устройств не обязательно.
Параметры М, Рн, V, ρ КУС может при необходимости получать от системы воздушных сигналов (например, СВС) или от централи скорости и высоты типа ЦСВ и др. При этом КУС должен быть связан с этими устройствами (системами) при помощи электропроводов с применением (или без) ШР и/или АЦП при необходимости. В качестве чувствительных элементов ЦСВ или СВС используют анероидные и/или манометрические приборы, с которыми эти устройства связаны при помощи трубок с штуцерными разъемами (ШРА). (для справок см. "Справочник авиационного инженера" В.Г. Александров, редактор Лазаревич, издательство "Транспорт", 1973 г., с.246).
Возможно, получение этих параметров для КУС и непосредственно от приемников воздушного давления ПВД, анероидных приборов, бортовых ПНК, БК, бортовых ЭВМ и проч., с которыми КУС должен быть связан в данном случае электропроводами и/или трубками при помощи ШР и/или штуцерных разъемов ШРА соответственно. Если КУС - цифровая ЭВМ или аналоговый прибор, то эти сигналы должны преобразовываться в цифровой код или аналоговый сигнал при помощи таких же устройств, которые перечислены выше в списке для ДОУ и/или АЦП, которые могут соединяться с анероидными или манометрическими датчиками и/или их комбинаций и/или датчиками вышеупомянутых параметров.
Например, приемник воздушного давления (ПВД) связан трубкой с анероидной мембраной, связанной механически с потенциометрическим (или индуктивным, или электромеханическим цифровым прибором или СВС) прибором, который связан проводами через ШР с аналого-цифровым преобразователем АЦП, который связан электропроводами с КУС через ШР. Возможны и другие комбинации.
Если сигналы КУС получает не от СВС, ЦВС, ПHК или ЭВМ, а напрямую, то в КУС эти сигналы могут преобразовываться по известным с прошлого века формулам в величины Рн, М и т.д.
Если ЭЦ КУС получает эти параметры в электроцифровом виде, то преобразовывать их через АЦП не надо. В этом случае цифровые КУС связываются электропроводами через ШР с СВС или ЦВС, ПНК, ЭВМ или проч.
Параметр α КУС может получать от датчика угла атаки (ДУА), с которым КУС должен быть связан в этом случае при помощи электропроводов через ШР (или без). Если параметр α вырабатывается в ДУА в аналоговом виде, а КУС - цифровая ЭВМ, то в этом случае электропровода от ДУА должны быть связаны с АЦП (через ШР или без), а АЦП проводами связан с КУС (через ШР или без).
Возможно получение α от ПНК, бортовой цифровой вычислительной машины (БЦВМ) и прочих устройств, с которыми в данном случае КУС должно быть связано электропроводами через ШР или без них. Параметр mт КУС получает от системы топливомера, (например СЭТС), с которой КУС связана электропроводами через ШР. Если КУС цифровая, то провода от топливомерной системы связаны с АЦП, который связан с КУС (см. "Справочник авиационного инженера") тоже электропроводами через ШР. Параметр mг может вводиться вручную членами летного экипажа перед полетом при установке на самолете грузов, специальных грузов на специальных крепежных элементах или без них.
Для ручного ввода самолет оборудуется специальными задающими устройствами, в которые информация о массе груза вводится либо переключателем (можно галетным), либо при помощи специальных кнопок или с клавиатуры компьютерных устройств.
Для автоматического ввода параметра mг на самолете в узлах крепления грузов устанавливаются концевые выключатели, замыкающие свои электроцепи при установке специальных грузов (например, концевые выключатели в узлах крепления на самолете "Мрия" для перевозки спецконтейнера). КУС связан электропроводами (через ШР или без) с данными устройствами, по которым в КУС поступает информация о грузе. При необходимости эти устройства можно связать с АЦП, а АЦП с КУС электропроводами (с ШР или без). Для выработки сигнала, пропорционального массе груза, эти устройства могут иметь внутри динамометрические датчики, потенциометры, емкостные датчики, индуктивные, любые перечисленные в данном описании датчики, настроенные на выработку сигналов, пропорциональных массе груза при нахождении самолета на земле и устройства для запоминания и хранения этой информации. Например, галетный переключатель, установленный в кабине летчика, может замыкать цепи с установленными в них специально настроенными потенциометрами или трансформаторами, с которых будет сниматься напряжение, пропорциональное массе груза, которая написана на внешней части переключателя. Например, 1 тонна, 2 тонны, 10 тонн и т.д. (которым будет соответствовать выходное напряжение переключателя 1 вольт, 2 вольта, 10 вольт и т.д.). Для выработки сигнала, пропорционального массе груза, эти устройства могут просто замыкать электрические цепи, связанные с КУС, появление сигнала в которых должно расцениваться КУС как появление на борту соответствующего груза.
КУС можно выполнить в виде аналоговой, цифровой ЭВМ, счетно- решающих устройств на основе мостиковых схем, вращающихся трансформаторах, операционных вычислителях и прочих элементах для КУС (ЭКУ). В понятие ЭКУ включены все перечисленные элементы. КУС можно условно разделить на следующие части:
1. Вычислитель δ мax - предельного отклонения руля высоты (штурвала, проводки управления, ОУ и т.д.) ВПО 14.
2. Сумматор КУС (СКУ 15).
3. Вычислитель Δ δ -величины упреждения (ВВУ) 13.
4. Преобразующее устройство (ПУ) 16.
5. В состав КУС можно включить СУ С 20, а можно сделать его отдельно от КУС.
ВПО и ВВУ связаны с СКУ. СКУ связан еще и с ЭПУ (с проводкой управления) (для получения сигнала δ ) и с ПУ. ПУ может быть связано с ВВУ и СУС.
ВПО 14 можно условно разделить на:
- функциональный блок δ max1 (Б1), воспроизводящий нелинейную функцию δ в зависимости от числа М в соответствии с формулой 25. В этой формуле все параметры зависят от числа М полета. Сигнал, пропорциональный М (далее в описании слово пропорциональный будет опускаться), этот блок берет от КУС, частью которого он является и связан с ним проводами, передающими параметр М (в виде Э или ЭЦ сигнала);
- вычислитель δ max2 (Б2) 24, связанный с КУС (частью которого он является) проводами и по которым он получает сигналы М, Рн, mг и mт. Вычислитель, собранный на основе ЭКУ (например, специальные усилители, мостиковые схемы, функциональные блоки и т.д.), производит вычисления по формулам (26, 27, 28);
- сравнивающее устройство (СУ) 25, связанное с вычислителем δ max1 и вычислителем δ mах2 проводами и проводящее сравнение между получаемыми от них параметрами δ max1, δ mах2. Ближайшее к нулю значение выдается из сравнивающего устройства СУ на связанный с ним проводом СКУ 25. Если в КУС отсутствует Б2 (вычислитель δ mах2),то вычислитель δ mах1 (Б1) напрямую связан с СКУ, а сравнивающее устройство СУ не применяется.
СКУ может быть собран на основе ЭКУ (например, операционные усилители, мостиковые схемы и связан проводами с ВПО (с СУ сравнивающим устройством) или с Б1 (вычислителем δ maх1), с вычислителем Δ δ (ВВУ 13), с КУС, частью которого он является и от которого он получает сигнал δ , со входом ПУ 16 (преобразующего устройства), которое пропускает через себя сигналы только одного знака.
Преобразующее устройство ПУ 16 может быть собрано на основе диодных элементов и/или операционных усилителей и прочих ЭКУ и связано с СУС.
Вычислитель Δ δ (ВВУ) связан с СКУ, ПУ, с КУС (частью которого он является) проводами и получает от них все или некоторые из следующих сигналов: δ ’(t) (или δ , который дифференцируется для получения δ ’(t) внутри ДУ 12), М, РH, mT, mГ, α . Еще он связан с выходом преобразующего устройства ПУ проводом, по которому он получает выходной сигнал из него.
Специально для сотрудников ФИПС напомню, что и вычислитель Δ δ (ВВУ), и вычислитель δ max (ВПО) связаны Э проводами с устройствами, датчиками, приборами, элементами, указанными в этом описании, от которых они получают параметры δ , δ ’, М, РH, mГ, mT, α (это на случай, если сотрудники ФИПС не пожелают признавать тот факт, что вычислитель Δ δ (ВВУ) и вычислитель δ mах (ВПО) являются частью КУС, а КУС получает все перечисленные параметры от указанных в данном описании датчиков, элементов проводки управления, устройств и т.д. И, следовательно, эти вычислители получают все эти параметры, т.к. они сами связаны с перечисленными в описании элементами, датчиками, устройствами (проводами) или другими известными производителям техники способами.
Вычислитель Δ δ (ВВУ) может быть связан с ДУА, с системой воздушных сигналов проводами вышеупомянутым способом, по которым он получает параметры α , РH, М, V, ρ , а также с топливной системой самолета, от которой он получает параметр mT.
Вычислитель δ mах тоже связан с теми же системами, что и вычислитель Δ δ . Вычислитель Δ δ может быть связан проводами с датчиком положения руля высоты, который механически (то есть любым перечисленным в этом описании способом) связан с рулем высоты или с любым ЭПУ или ОУ или с самим ДОУ. От них он получает параметр, пропорциональный δ . Он может быть связан с датчиком угловой скорости руля высоты, расположенным там же, и связанным так же как и описано выше для датчика положения РВ, но выдающим не параметр δ , а параметр δ ’(t).
Вычислитель величины упреждения ВВУ условно можно разбить на следующие части:
- вычислитель коэффициента усиления ВКУ 9,
- вычислитель коэффициента обратной связи ВОС 10,
- вычислитель самой передаточной функции ВП 7,
- программное устройство ПРУ 8,
- в случае необходимости, для получения сигнала δ ’(t) из δ (t) может применяться дифференцирующее устройство ДУ.
Кроме того, сочетание дифференцирующего и инерционного звена первого порядка дает в итоге форсирующее звено. Этот факт дает возможность применять вместо входного сигнала δ ’(t) сигнал δ , а вместо вычислителя Δ δ не инерционное звено первого порядка, а форсирующее звено. Предприимчивым российским авиастроителям этот факт возможно позволит избежать лицензионных выплат (к сожалению).
- вычислитель времени τ (ВВ) (необязательно) 11,
- необязательное преобразующее устройство 12а,
- ДУ 12 связан с КУС, частью которого он является, электропроводами и получает от него параметр δ . Преобразуя его в δ ’ (t), ДУ передает его по проводам в ВП, с которым ДУ связано проводами. Если КУС получает δ ’(t), то ВП напрямую связан с КУС, частью которого он является, проводами, по которым получает от него параметр δ ’(t), а ДУ не применяется. В этом описании слово провод обозначает не только металлическую проволоку с внешней изоляцией, но и любой токопроводящий элемент (например, вытравленная на монтажной плате токопроводящая дорожка, напыленная, наклеенная, нанесенная иным способом и т.д.).
- ВКУ собран на основе ЭКУ и связан с КУС, частью которого он является, Э проводами, по которым он может получать параметры М, РH, mГ. ВКУ производит расчеты в соответствии с формулами (23,2-22). ВКУ может и не производить вычисления по формулам (23,2-22) в том случае, если устройство рассчитано для типового режима полета. При этом коэффициент усиления ВКУ (Кус) может быть рассчитан на этапе проектирования и установлен постоянным. Кроме того, ВКУ может быть сделано рассчитывающим коэффициент усиления в зависимости лишь от некоторых параметров, например, только от РH и/или М. Остальные параметры могут быть заданы постоянными как для типового режима полета. ВКУ выдает сигнал, пропорциональный коэффициенту усиления Кус в ВП, с которым он связан Э проводами или другим электро-токопроводящим способом, указанным в описании. (Например, напряжение, пропорциональное Кус).
ПРУ собрано на основе ЭКУ и связано с КУС, частью которого оно является, электротокопроводящими проводами, по которым при необходимости оно может получить параметр α (Э или ЭЦ сигнал, пропорциональный углу атаки самолета α ) и дифференцировать его неоднократно с целью получения параметров α , α ’(t), α ’’(t) (Э или ЭЦ сигналов, пропорциональных α , α ’(t), α ’’(t)) при помощи своих внутренних дифференцирующих устройств, с которыми оно связано электротокопроводящими проводами. Получение параметра α не является обязательным. ПРУ может получать свой сигнал с выхода ПУ 16, с которым оно связано проводами (то самое преобразующее устройство, которое пропускает сигнал только одного знака). Этот сигнал программное устройство использует для формирования сигнала включения режима работы ВП №1. (Согласно таблице 1). Например, по сигналу от преобразующего устройства формируется сигнал выключения первого режима ограничения в ВП). Для обработки этого сигнала можно использовать ЭКУ, реле, поляризованные реле, релейные усилители с самоблокировкой или без и т.д.). В общем случае связь элементов ВВУ следующая: ДУ, ПРУ, ВВ, ВКУ, ВОС связаны с КУС, частью которого они являются, и получают от него все или некоторые необходимые им параметры, получаемые КУС от связанных с ними устройств, датчиков, элементов, систем и т.д., указанных в этом описании. Связь осуществляется любым известным способом передачи Э или ЭЦ сигналов. Например, по Э проводам. ДУ связан с С. С связан с У1. У1 связан с У2, У2 связан с И3. И3 связан У4 и с СКУ или с НПУ. У4 связан с У3. У3 связан по типу обратной связи с С. Кроме того, ВВ связан с ПРУ, ПРУ связан с У1. ВКУ связан с У2. ВОС связан с У4. ПРУ имеет еще связь и с У3. Для механической СУЛА ПРУ получает сигнал от KB 39, с которым оно связано электропроводами (KB расположен на штоке ШУ 41, который является частью МИУ). По получению этого сигнала ПРУ передает в ВП, с которым оно связано электропроводом, сигнал на включение режима N1 согласно таблицам описания 1 и 2. ПРУ выдерживает этот режим (и/или сигнал) в течение времени τ . Формула 8 для вычисления τ представлена ниже по тексту.
ВВ собран на основе ЭКУ и связан с КУС, частью которого он является, эл. проводами, по которым он может получать параметры М, РH, mГ и все перечисленные в этом описании параметры. ВВ производит расчеты в соответствии с формулами (8,4-22).
ВВ может и не производить вычисления по формулам (8,4-22) в том случае, если устройство рассчитано для типового режима полета. При этом параметр τ может быть рассчитан на этапе проектирования и установлен постоянным. Кроме того, ВВ может быть сделано рассчитывающим параметр τ в зависимости лишь от некоторых параметров, например, только от РH и/или М. Остальные параметры могут быть заданы постоянными как для типового режима полета. ВВ формирует величину временной задержки для выдачи управляющего сигнала из ПРУ в ВП. ВВ связан с ПРУ Э проводами или другим электротокопроводящим способом, указанным в описании. Например, можно выдавать напряжение, пропорциональное τ , из ВВ в ПРУ по Э проводам, которыми ВВ связан с ПРУ.
Длительность τ определяется ВВ (вычислителем τ ), с которым ПРУ связано проводом, τ может вычисляться бортовым компьютером, использующим формулы (8,4-22). Возможна связь между БК и любым элементом ВВУ, кроме того, ВВУ как и КУС сами могут быть выполнены в виде бортового компьютера или программы для него. Возможно применение БК вместо любого (любых) элемента (элементов) КУС. Например, БК можно использовать вместо ВВ и ПРУ, при этом и величина τ и сама выдержка по времени может формироваться в БК, который будет выдавать в ВП (У1 и У3) сигналы на переключение режима работы КУС (ВП) из первого (№1) во второй (№2) в виде коэффициентов усиления К1 и К2 соответственно (в У1 К1, а в У3 К2) по истечении времени τ после начала работы режима №1. Коэффициенты усиления К1 и К2 могут передаваться в виде Э или ЭЦ сигналов, напряжения и любым другим известным сотрудникам ФИПС электротокопроводящим способом в ВП из БК или ПРУ через АЦП (в этом описании цифроаналоговые преобразователи, как и аналогово-цифровые обозначены как АЦП) или без АЦП в зависимости от способа реализации по Э проводам, которыми они связаны (конкретно связаны).
τ может быть вычислено заранее для типового применения и заложено в ПРУ, при этом использование вычислителя τ не требуется. По истечении времени τ после начала работы режима номер 1 согласно таблицам описания, ПРУ выдает в связанный с ним проводами ВП сигнал на переключение режима из 1 в режим 2 (и/или включает режим №2). Для формирования временной выдержки τ в ПРУ можно использовать ЭКУ, поляризованные реле, релейные усилители, таймерные устройства и прочие известные элементы и устройства (вплоть до электродвигателей с кулачками и контактором или концевым выключателем, потенциометрические устройства, таймерные и т.д.).
Для выработки сигнала переключения режима 1 в режим 2 вместо τ можно использовать сигнал α и его производные (согласно таблице). Длительность режима N2 большой роли не играет, и ее можно назначить равной 1 сек. Для ее выработки можно использовать еще все вышеупомянутые элементы. Длительность режима 2 ПРУ может определять не по времени, а все по тому же параметру α . Для включения режима 2 необходимо одновременное существование условий α ’≤ 0 и α ’’<0. Исчезновение любого из этих условий служит сигналом для выключения режима 2.
Например, при поступлении сигнала от ПУ, ПРУ выдает сигнал на включение режима 1. Через время τ оно выдает сигнал в ВП на включение режима 2. По истечении еще одной секунды - на выключение режима №2 (и переход в рабочий режим) согласно таблицам 1 и 2 и фиг.6.
Например, при поступлении сигнала от преобразующего устройства ПРУ выдает сигнал на включение режима №1 при получении сигнала α , первая и вторая производная от которого меньше и/или равна 0 (α ’≤ 0 и α ’’<0), включается режим №2. (При этом из ПРУ идет по проводам соответствующий сигнал в связанный с ПРУ проводами ВП). Когда α ’’ изменит знак, то ПРУ отключит режим №2 (так как перестает существовать условие α ’≤ 0 и α ’’<0). Режим №2 ПРУ может включать только из режима №1.
При выключении режима №2 ВП переходит в рабочий режим. Режим №3, описанный в таблице, не предусмотрен для рассмотрения сотрудником ФИПС и рассчитан только на желание конкретных производителей. Режим №3 можно не использовать. Программное устройство можно не использовать. ПРУ можно сделать в виде простой схемы с электродвигателем, в который при получении сигнала от KB или преобразующего устройства, реле, управляющее питанием этого электродвигателя (ЭД), становится на самоблокировку и подает питание к ЭД. Он вращает вал, соединенный через редуктор с кулачковым механизмом из набора кулачков. Кулачковый механизм имеет вал с расположенными на нем кулачками, а также концевые выключатели, на которые эти кулачки воздействуют. Кулачки при вращении вала, вращаемого Э двигателем через редуктор (это все связанные элементы), воздействуют на соответствующие концевые выключатели, которые, замыкая и/или размыкая цепи соответствующих цепей, связанных с ВП, обеспечивают подачу соответствующих сигналов на включение или выключение режимов ВП, а также, возможно, и на снятие самоблокировки с реле.
Вычислитель времени τ (ВВ) связан с КУС (частью которого он является) проводами и может получать от него сигналы М, РH, mT, mГ. Он проводит вычисления по формуле (8). Он собран при помощи ЭКУ и связан с ПРУ проводами, по которым он передает параметр τ в ПРУ. ВВ можно не использовать, а параметр τ вычислить для типового режима полета еще на этапе конструирования и ввести его в ПРУ.
В данном описании КУС можно рассматривать как корпус, к которому присоединены (не электрически, то есть провода не должны создавать “короткого замыкания” между собой по корпусу КУС), все вышеупомянутые провода через ШР, с которыми он связан, а от этих ШР идут провода ко всем потребителям (элементам), с которыми они (некоторые из этих проводов) связаны внутри КУС.
Также в состав ВВУ входит вычислитель коэффициента усиления обратной связи ВОС. ВОС собран на основе ЭКУ и связан с КУС, частью которого он является, Э проводами, по которым он может получать параметры mT, М, Рн, mГ, ВОС производит расчеты по формулам: (24,3-22), ВОС может и не производить вычисления по формулам (24,3-22) в том случае, если расчет ведется для типового режима полета. При этом коэффициент усиления ВОС может быть рассчитан на этапе проектирования и установлен постоянным и заложен в ВОС или ВП (У2). Кроме того, ВОС может быть сделано рассчитывающим коэффициент в зависимости от некоторых параметров, например, только РH и/или М. Остальные параметры могут быть заданы постоянными как для типового режима полета. ВОС выдает сигнал, пропорциональный коэффициенту обратной связи для передаточной функции вычислителя Δ δ в ВП, с которым он связан, Э проводами. (Например, напряжение, пропорциональное Кoc).
ДУ (которое может входить в состав ВВУ) представляет собой дифференцирующий блок, производящий дифференцирование входного сигнала δ и передающий полученный в результате дифференцирования сигнал δ (t) в ВП. Необходимость применения и связи ДУ были рассмотрены выше по тексту. ДУ собран на основе ЭКУ.
ВП собран на основе ЭКУ и связан с КУС, частью которого он является, проводами, по которым он может получать следующие параметры: δ (t), сигналы программного устройства К1 и К2, параметры ВКУ и ВОС, ВП может быть связан с ДУ, ПРУ, КУС, ВКУ, ВОС, СКУ, НПУ с датчиками и устройствами, описанными в этом описании. Например, с датчиком δ (t). ВП выполняет роль устройства, обрабатывающего входной сигнал δ ’(t) (или δ ) по закону передаточной функции - инерционного звена 1-го порядка с изменяемым коэффициентом усиления звена и постоянной времени Т. Из основ автоматики известно, что эти параметры можно изменять путем изменения коэффициентов усиления Куc и коэффициента усиления обратной связи Кoc. ВП может быть выполнено на основе операционных усилителей, электронно-вычислительных блоков, аналоговых схем, ЭКУ и т.д. ВП может состоять из следующих связанных между собой элементов: суммирующий блок (С), связанный с ДУ или КУС и получающий от него параметр δ ’(t). Этот блок связан с блоком произведения №1 (У1) (умножителем), который связан с умножителем №2 (блоком произведения), (У2), который связан с блоком интегрирующего звена (ИЗ) с интегрирующим блоком, который связан с выходом из ВП (он и является выходом из ВП). Выход из ВП связан с СКУ (Если не применять НПУ). Кроме того, выход из интегрирующего звена связан по типу обратной связи с умножителем №4(У4) (блоком произведения), который связан с умножителем №3 (У3) (блоком произведения), который связан по типу обратной связи с суммирующим блоком ВП (С).
Умножитель №1 (У1) связан с ПРУ.
Умножитель №3 (У3) связан с ПРУ.
Умножитель №2 (У2) связан с ВКУ.
Умножитель №4 (У4) связан с ВОС.
Все связи, перечисленные в данном описании, ВП можно выполнить в виде Э проводов, в виде отдельной монтажной схемы и прочими известными сотрудниками ФИПС способами. Все блоки и/или элементы, перечисленные в данном описании для КУС, ВП, ПРУ и т.д., можно выполнить в виде одного или нескольких связанных блоков. Например в виде одного блока можно выполнить КУС, ВП, умножитель №1 с умножителем №2, умножитель №3 с умножителем №4. В С (суммирующем блоке ВП) происходит вычитание сигнала обратной связи от умножителей №3 и 4 из сигнала δ ’(t). Результирутогций сигнал поступает в умножители №1 и 2, после чего результирующий сигнал интегрируется в интегрирующем звене (интегрирующем блоке) (ИЗ). В умножителях происходит умножение входящих сигналов на сигналы, поступающие от связанных с ними ПРУ, ВКУ и ВОС. От ВКУ поступает сигнал, пропорциональный коэффициенту усиления Кус (формула 23). От ВОС поступает сигнал, пропорциональный Кос (формула 24). От ПРУ поступают сигналы, пропорциональные числам, указанным в таблице 2, в зависимости от режима работы программного устройства. Вместо умножителей возможно применение реле разрывающих и/или переключающих электрические цепи внутри ВП совместно с усилителями сигнала.
КУС и/или все указанные в данном описании элементы (кроме механических элементов) можно выполнить при помощи цифрового вычислительного устройства на основе интегральных микросхем и/или иного, и собранного в виде единого блока (или нескольких связанных между собой блоков). Этот блок (блоки) с целью получения всех вышеперечисленных в данном описании параметров от вышеперечисленных датчиков, устройств и систем должен быть со всеми ними связан при помощи вышеперечисленных элементов (например, Э проводами с ШР). Кроме того, если сигналы от датчиков, систем, устройств поступают не в цифровом, а в аналоговом виде, то они должны преобразовываться в цифровой вид при помощи аналогово-цифровых преобразователей, которые должны быть связаны с датчиками, системами, устройствами и с цифровым вычислительным блоком (блоками) при помощи проводов. Кроме того цифровой блок должен быть связан либо с ИУ, либо с МИУ, либо с СУС. Все указанные в описании элементы можно выполнить в виде элементов программы для бортового компьютера. Для этого бортовой компьютер должен получать от датчиков, систем, устройств, перечисленных выше, все и/или некоторые из перечисленных в данном описании параметры. Например: М, РH, mT, mГ, α , δ , δ ’(t) и т.д.
Для преобразования в цифровой вид датчики, системы, устройства должны быть связаны проводами с АЦП, а те в свою очередь с бортовым компьютером. В памяти бортового компьютера должна быть программа, производящая вычисления по формулам (1-30) и использующая данные в памяти компьютера по аэродинамическим коэффициентам, используемым в этих формулах. (Эти данные можно вводить на этапе производства самолета). В результате вычислений компьютер должен выдавать либо сигнал, пропорциональный откорректированному положению руля высоты δ к на ИУ согласно формуле 30, либо в МИУ (в случае применения механической СУЛА) δ mах миу согласно формуле: δ mах миу=δ mах-Δ δ (где Δ δ - вычисляемая в ВВУ величина упреждения, а δ mах - вычисляемое в ВПО 14 предельно допустимое положение РВ), либо в СУС (в случае если СУС входит в состав СУЛА и не входит в состав БК или КУС) Δ δ к согласно формуле 29. При этом Δ δ к не может быть положительным. В случае если Δ δ к>0, то БК или КУС обнуляет значение параметра Δ δ к и выдает значение Δ δ к=0.
Цифровой вычислительный блок (в случае его применения вместо БК) должен быть связан по тем же принципам с теми же датчиками, системами, устройствами, исполнительными устройствами, суммирующими устройствами, МИУ, согласно тем же формулам и производить вычисления по тем же формулам и алгоритмам, что и для БК или КУС. Алгоритм программы для БК изображен на фиг.9 и более подробно расписан в этом описании. КУС можно выполнить в одном корпусе с СУС, тогда общая схема соединения КУС и СУЛА будет выглядеть так: ОУ связан с ДОУ, который связан с ЭПУ, которые последовательно связаны друг с другом и с КУС и с СУС, которое опять связано с ЭПУ, которые последовательно связаны друг с другом и с ИУ, которое связано при помощи СЭ с РВ. При этом КУС связано с датчиками, устройствами и системами, перечисленными в данном описании, и может получать от них параметры М, РH, mT, mГ, α , δ ’(t).
Описание поведения самолета в процессе выхода на предельный угол атаки выглядит следующим образом.
Устройство работает таким образом, что процесс вывода самолета на максимально-допустимый угол атаки будет выглядеть как на фиг.6. В момент времени t1 летчик начинает движение штурвала на увеличение угла атаки (α заданное), при этом двухступенчатый ограничитель вычисляет предстоящий заброс угла атаки, и если величина этого заброса такова, что угол атаки α может выйти за предельное значение (α мах), то ограничитель вводит первую ступень ограничения на положение руля высоты (в момент времени t2 фиг.6), а самолет продолжает по инерции увеличивать угол атаки α . В момент времени t3 угол атаки α приходит в верхнюю точку колебательного процесса. Благодаря ограничителю она совпадает с максимально-допустимым значением ((α мах). Рост угла атаки прекращается и выключается первая ступень ограничения. Руль высоты получает свободу движения до второй ступени ограничения. При этом руль высоты на второй ступени ограничения будет задавать именно тот угол атаки (α зaдaнный), на который самолет уже вышел (с незначительной погрешностью). Этот угол атаки равен максимально-допустимому значению (α мах).
В момент времени t4 скорость роста угла атаки α ’(t) равна нулю, а сам угол атаки α приблизительно равен заданному значению (α заданный). Следовательно, отсутствуют инерция и неуравновешенные моменты сил, которые могли бы вывести самолет из этого состояния. Наступает устойчивое равновесие по углу атаки. Таким образом, самолет выходит на максимально допустимый угол атаки точно, быстро и без последующих колебаний (фиг.6).
Область применения выглядит следующим образом.
Данное изобретение можно практически применять в виде дополнительного устройства к системе управления на самолетах и беспилотных летательных аппаратах. На самолетах с механической проводкой управления можно применять электрогидромеханические или электромеханические ограничители положения руля высоты (фиг.10). На самолетах с электродистанционной проводкой управления можно применять электронные ограничители положения руля высоты (фиг.5, 7). Заявляемое изобретение можно применять на самолетах, имеющих кроме руля высоты еще и управляемый стабилизатор. При этом входные параметры устройства необходимо преобразовывать по формулам пересчета. Можно применять данное изобретение в виде сигнализации летчику о приближении к предельному углу атаки.
Работа и принцип действия элементов устройства выглядят следующим образом.
Основным элементом устройства является вычислитель величины упреждения Δ δ ВВУ. Основным режимом работы ВВУ является режим “Р” (рабочий). На этом режиме ВВУ вычисляет величину упреждения Δ δ в соответствии с передаточной функцией W(P) и с формулами (1-22).
 - передаточная функция вычислителя Δ δ (1)
- передаточная функция вычислителя Δ δ (1)
где  - постоянная времени для функции W(P) (2)
- постоянная времени для функции W(P) (2)
К=-R· A/q - коэффициент усиления для функции W(P) (K>0) (3)
R-Amz
q=Amz

 (6, 7, 8)
(6, 7, 8)
где arctg(-L/N)∈ ]π /2... π [; (9)
A=[cos(L· τ )+(N/L-q/(R· L))· sin(L· τ )]· e-N· τ ; (10)
Amz
Аmz
коэффициент (12)
Amz
коэффициент (13)
Ay
Для расчета аэродинамических коэффициентов Аmz
Amz
Amz
Amz
Aу
Aу
a=286+PH·5,4· 10-1; (22)
В данных формулах указаны следующие параметры:
- W(Р) - обозначение передаточной функции вычислителя.
- Параметр Δ δ - это величина упреждения. Она соответствует инерционному отклонению угла атаки Δ α заброса (выше заданного рулем высоты угла атаки α зад) во время остановки руля высоты на первой ступени ограничения. (На фиг.6 величина Δ α заброса равна расстоянию между заданным углом атаки α зад и действительным углом атаки α в момент времени t3). Параметр Δ δ - это выходной параметр передаточной функции W(P).
- Параметр δ ’(t) - это угловая скорость руля высоты. Это входной параметр передаточной функции W(P).
- Параметр <τ > для формул 10 и 8 - это длительность временного промежутка от момента t2 до момента t3 (теоретическая).
- m - масса самолета, топлива и нагрузки,
- рн - атмосферное давление на высоте полета,
- Amz
- Суα - производная от коэффициента подъемной силы по углу атаки (известный аэродинамический коэффициент),
- mz (известный аэродинамический коэффициент),
(известный аэродинамический коэффициент),
- mz
- mz
- ρ - плотность воздуха на высоте полета самолета,
- bа - длина средней аэродинамической хорды самолета,
- Jz - продольный момент инерции самолета. Приближенно его можно выразить как функцию от массы топлива и груза: Jz=Jz0+Кгр·mгр·Кт·mт, где Kгр и Кт - коэффициенты пропорциональности. Можно использовать и более сложные формулы.
- М - число Маха полета,
- S - площадь крыла самолета,
- а - скорость звука на высоте полета,
- V - скорость полета.
Вычислитель передаточной функции (позиция 7) (ВП) построен так, что его элементы образуют устройство, которое преобразует свой входной сигнал δ ’(t) в Δ δ по математическому закону, соответствующему передаточной функции - инерционное звено первого порядка. На вход вычислителя Δ δ подается сигнал, пропорциональный δ ‘(t), который можно получить либо от ДУ 12, либо от специальных датчиков, которые можно присоединить к любому элементу системы (проводки) управления рулем высоты, включая РВ или ОУ.
Одним из множества способов реализации инерционного звена первого порядка является схема, изображенная на фиг.1. При этом в суммирующем блоке (С) (фиг.1, позиция 1) происходит вычитание сигнала от умножителя №3 (УЗ) (фиг.1, позиция 5) из сигнала δ ’(t). Преобразованный в сумматоре ВП (позиция 1) сигнал поступает в умножитель №1 (позиция 2), где он умножается на сигнал К1 от ПРУ (позиция 8). Преобразованный в умножителе №1 сигнал поступает в умножитель №2 (позиция 3), где он умножается на сигнал Кус от ВКУ (позиция 9). Преобразованный в умножителе №2 сигнал поступает в блок интегрирующего звена (ИЗ) (интегрирующий блок) (позиция 4), где он интегрируется по времени. Преобразованный в интегрирующем блоке сигнал поступает на выход из ВП и в умножитель №4 (позиция 6), где он умножается па сигнал Кос от ВОС (позиция 10). Преобразованный в умножителе №4 сигнал поступает в умножитель №3 (позиция 5), где он умножается на сигнал К2 от ПРУ. Преобразованный в умножителе №3 сигнал поступает в суммирующий блок ВП, где он вычитается из входного сигнала δ ’(t).
ПРУ вырабатывает сигналы К1, равные (0; 1/3; 1), для умножителя №1 и сигналы К2, равные (1; 100), для умножителя №3 в соответствии с таблицами 1 и 2 в зависимости от режима работы устройства. Режим работы ПРУ определяется в соответствии с таблицами 1 и 2.
Для вычисления времени τ можно использовать ВВ (позиция 11), производящий расчеты по формулам 6-9. В зависимости от результата этих вычислений ВВ выдает управляющие сигналы в ПРУ на переключение режимов.
ВКУ (позиция 9) производит расчеты по формуле 23 и выдает в умножитель №2 сигнал Кус (коэффициент усиления).
Кус=К/Т (23)
ВОС (позиция 10) производит вычисления по формуле 24 и выдает в умножитель №4 сигнал Кос (коэффициент обратной связи).
Кос=1/К (24)
Из ВП (вычислителя Δ δ ) сигнал попадает в СКУ (фиг.3, позиция 15), где этот сигнал складывается с сигналом δ , пропорциональным угловому положению РВ или положению ОУ, и из результата от этого сложения вычитается сигнал δ mах, получаемый от вычислителя δ mах (позиция 14). Вычислитель δ mах вырабатывает сигнал δ mах следующим образом: функциональный блок, воспроизводящий функцию δ max1-f(M), получает сигнал, пропорциональный числу Маха полета М от устройства 27 (системы). В зависимости от величины этого сигнала функциональный блок 23 формирует значение δ max1 и выдает значение в сравнивающее устройство 25. Для каждого типа самолета существует своя зависимость между числом М полета и предельным углом атаки α mах, аэродинамическими коэффициентами mz0, mzα , mzδ . Для каждого типа самолета известно значение α mо - угол атаки нулевого момента тангажа.
Значение δ mах1 можно определить но формуле (25).

Эту формулу следует использовать для определения функции δ max1=f(М). Именно эту функцию и должен воспроизводить функциональный блок 23. Вычислитель значения δ mах2 (позиция 24) получает сигналы, пропорциональные М, давлению воздуха РH, массе топлива mT, массе груза mГ от устройств, с которыми он связан. Он производит вычисления по формулам (26, 27, 28),
m=mC+mT+mГР; (28)
- где параметр  F (относительное расстояние аэродинамического фокуса от передней кромки средней аэродинамической хорды крыла вдоль оси Х самолета) зависит от числа М полета.
F (относительное расстояние аэродинамического фокуса от передней кромки средней аэродинамической хорды крыла вдоль оси Х самолета) зависит от числа М полета.
- Параметр nу max - предельно допустимая вертикальная перегрузка самолета - определяется для каждого типа самолета индивидуально и зависит только от конструктивных особенностей самолета или от физических способностей человека - летчика.
- Параметр g - ускорение свободного падения (постоянен).
- S - площадь крыла самолета.
-  - относительное расстояние от центра тяжести самолета до передней кромки средней аэродинамической хорды крыла вдоль оси Х самолета.
- относительное расстояние от центра тяжести самолета до передней кромки средней аэродинамической хорды крыла вдоль оси Х самолета.
- mс - масса пустого самолета.
- m - масса самолета.
Вычислитель значения δ mах2 24 выдает полученное в результате вычислений значение, пропорциональное величине δ maх2, в сравнивающее устройство 25.
В сравнивающем устройстве 25 происходит сравнение параметров δ max1 и δ mах2.Наименьшее из них по модулю (наибольшее по абсолютному значению, так как δ mах1 и δ max2 отрицательные) значение выдается в СКУ 15 и называется δ mах.
В СКУ 15 происходит сложение сигналов Δ δ от вычислителя величины упреждения 13 с величиной δ - заданного положения руля высоты, которое можно получить от ДОУ 19, элементов проводки системы управления рулем высоты (тангажем), от датчиков и прочих элементов, упомянутых в этом описании. В СКУ происходит еще и вычитание сигнала δ mах, получаемого из вычислителя 14.
Таким образом, в СКУ производятся вычисления по формуле (29):
Δ δ +δ -δ max=Δ δ к, (29)
где Δ δ к - результат этих вычислений (величина коррекции).
Формулируемая в СКУ 15 величина Δ δ к передается из него в связанное с ним преобразующее устройство (позиция 16).
Преобразующее устройство 16 передает на выход из устройства 16 без изменения сигналы, соответствующие отрицательному значению величины коррекции, и обнуляет (не пропускает) сигналы, соответствующие положительному значению величины коррекции. Сигнал из преобразующего устройства 16 поступает в суммирующее устройство 20 (СУС) и в вычислитель величины коррекции 13 (конкретно в программное устройство 8) (ПРУ). Возможно применение усилителей сигнала для программного устройства 8, в которых сигнал коррекции, поступающий в программное устройство 8, усиливался бы. Для программного устройства не важно значение величины коррекции. Важен только факт наличия или отсутствия отрицательного сигнала величины коррекции. При получении сигнала, соответствующего отрицательному значению величены коррекции, программное устройство формирует сигналы для ВП (вычислителя передаточной функции) (позиция 7), соответствующие включению первой ступени ограничения в соответствии с таблицей (включается режим №1) К1=0, К2=1. Это происходит в момент времени t2 (фиг.6). Режим №1 позволяет самолету по инерции выйти на предельный угол атаки α мах (в момент времени t3). При этом угол атаки самолета α будет выше, чем тот угол атаки α заданное, который задается рулем высоты (фиг.6, промежуток времени от t2 до t3).
Сигнал, поступающий из преобразующего устройства 16 (ПУ) в суммирующее устройство 20 (СУС), корректирует сигнал управления δ , идущий по всем элементам системы управления рулем высоты от ОУ 18 к рулю высоты 22. В СУС 20 величина коррекции Δ δ к вычитается из сигнала управления δ по формуле (30):
δ к=δ -Δ δ к. (30)
Из СУС 20 откорректированный сигнал управления δ к поступает в исполнительное устройство 21. Оно устанавливает РВ в такое угловое положение, которое соответствует откорректированному сигналу управления δ к=δ -Δ δ к. Кроме того, возможно использование сигнала δ к для дифференцирования его в ДУ 12 для получения параметра δ ’(t).
В случае использования механической системы управления самолетом с использованием механических тяг и качалок, работа устройств 13 и 14 аналогична вышеописанным устройствам. Отличие заключается в следующем.
Суммирующее устройство (фиг.10, позиция 15) (СКУ) вычитает из сигнала δ maх, идущего от устройства 14, сигнал Δ δ , идущий от устройства 13 (ВВУ). Результирующий сигнал, пропорциональный значению δ mах миу=δ mах-Δ δ , передается в МИУ 38. МИУ перемещает свой шток, который ограничивает ход упорного устройства 40, механически связанного с системой управления рулем высоты. Размещение МИУ и ход его штока должны быть отрегулированы таким образом, чтобы при упирании штока в упор упорного устройства, ход руля высоты ограничивался бы на таких углах δ , значение которых равнялось бы δ mах-Δ δ . Упорное устройство механически связано с исполнительным устройством 21 (ИУ), которое связано с рулем высоты. На конце штока МИУ расположен концевой выключатель 39, который при упоре штока в упор 42 упорного устройства 40 выдает сигнал в ПРУ 8 на включение режима №1 (К1=0, К2=1). Режим №1 позволяет самолету по инерции выйти на предельный угол атаки (α мах (в момент времени t3). При этом угол атаки самолета α будет выше, чем тот угол атаки α заданное, который задается рулем высоты (фиг.6, промежуток времени от t2 до t3).
Режим работы №2 (для механической или электродистанционной системы управления) может включаться по условиям, указанным в таблице 1. Это либо истечение промежутка времени τ (формула 8) с момента включения режима №1, либо условие выключения режима №1 при одновременном выполнении трех условий α ’’(t)<0; α ’(t)≤ 0; α ≤ α mах. Это происходит в момент времени t3 (фиг.6). На режиме №2 ПРУ 8 формирует К1=1; К2=100 согласно таблице 2 и выдает эти коэффициенты в умножители №1 и №3 соответственно. Режим №2 (переход на вторую ступень ограничения) позволяет рулю высоты выйти на угол δ мах. Благодаря этому самолет зафиксируется на предельном угле атаки в тот момент времени t4, когда рост угла атаки прекратится. Равенство заданного и действительного угла атаки при α ’(t)=0 означает отсутствие дальнейших колебаний угла атаки.
По истечению одной-двух секунд режим №2 выключается и происходит переход на режим “Р” (рабочий режим К1=1; К2=1).При этом самолет может оставаться на предельном угле атаки. Это происходит в момент времени t5 (фиг.6). В общем случае во время рабочего режима “Р” устройство отслеживает тот момент, когда надо включить режим №1 (первая ступень ограничения). Если уже находясь на предельном угле атаки летчик попытается еще больше увеличить угол атаки, то опять включится первая ступень ограничения (режим №1). В этом случае угол руля высоты δ и на режиме “Р”, и на режиме №1, и на режиме №2 будет равен δ мах (фиг.6, промежуток времени от t5 и далее).
Условия переключения режимов сведены в таблицу 1. При включении электропитания самолета устройство работает в режиме “Р”, вводя режимы №1 и №2 (первая и вторая ступени ограничения) только при необходимости. Для повышения надежности устройства введен режим №3. Схема переключения режимов представлена на фиг.11. Переключение режимов осуществляется за счет изменения коэффициентов К1 и К2 в ПРУ 8.
Алгоритм программы для бортового компьютера выглядит следующим образом.
Если в качестве корректирующего устройства (КУС) используется бортовой компьютер, то бортовой компьютер получает все или некоторые из вышеперечисленных параметров (этап 31). Далее КУС (бортовой компьютер) производит расчеты по формулам описания (этап 32), используя полученные данные и данные для режимов, указанные в таблицах 1 и 2 (при запуске системы устанавливается режим “Р”). На данном этапе алгоритма программа КУС вычисляет также и величину упреждения Δ δ . Так как для этого используется передаточная функция (ПФ) - инерционное звено первого порядка, то для его вычисления можно использовать метод последовательных приближений (итераций), используя приращение времени Δ t, равное реальному (синхронизированное). Синхронизацию можно проводить, используя способность компьютера к определению реального времени по системному таймеру компьютера. Синхронизацию можно проводить и на другом этапе программы. Например, на этапе 37.
Выходной параметр Δ δ передаточной функции W(P) можно получить методом последовательных приближений (итераций). Ниже приведен участок программы на языке программирования C++, который производит расчеты выходного параметра Δ δ передаточной функции W(P) в зависимости от входного параметра δ ’(t) - параметра, пропорционального угловой скорости руля высоты. В этой программе переменная i задает количество приближений, равное 5. В интересах быстродействия и точности эту переменную можно задавать другой (например, 3 или 6 и т.д.).
...
for (i=1, i≤ 5; i++)
{
xx1=K· B/T-x1/T;
x1=(xx1+xxo)/2· Δ t+x0;
}
x0=x1;
xx0=xx1;
...
В этой программе параметры х0 - выходной сигнал передаточной функции Δ δ в текущий момент времени. Параметр x1 - то же самое через промежуток времени Δ t. Параметр Δ t - параметр времени, через который рассчитывается выходной параметр передаточной функции. Параметр хх0 - скорость изменения выходного параметра Δ δ в текущий момент времени. Параметр xx1 - то же самое через промежуток времени Δ t. Промежуток времени Δ t не должен быть большим для точности расчетов. Нормальным можно считать Δ t, равное 0,1 секунды. Параметр К - коэффициент усиления инерционного звена (передаточной функции). Параметр Т - его постоянная времени. Параметр В - входной сигнал передаточной функции в текущий период времени, равный δ ’(t). Параметры хх0 и х0 при включении электропитания бортового компьютера равны нулю.
Этапы 33 и 34. Сравнение величины δ mах1 и δ mах2 в КУС производится с целью выбора наиближайших к нулю (наибольшего, т.к. δ mах1 и δ mах2 - величины отрицательные). При этом можно использовать логический оператор "больше" (или меньше). Например, на языке C++:
...
if(δ max2>δ max1)
δ max=δ max2;
else
δ max-δ max1;
...
Далее программа складывает параметры δ , Δ δ и вычитает из суммы параметр δ mах (этап 35), где Δ δ к - величина коррекции.
Δ δ к=δ +Δ δ -δ mах
Этап 36. Далее программа определяет наличие или отсутствие условий для перехода на другой режим работы (согласно таблице 1) и в зависимости от этого изменяет коэффициент усиления К передаточной функции и постоянную времени Т передаточной функции (согласно таблице 2).
Этап 37. Происходит выдача (изменение) в СУС сигнала Δ δ к (или отрицательного или равного нулю). Затем осуществляется переход в начало программы.
Для бортового компьютера, работающего совместно с механической системой управления самолетом, алгоритм программы будет отличаться тем, что на этапе 35 вычисляется значение Δ δ mахМИУ=δ mах-Δ δ и результат выдастся в МИУ. Кроме того на этапе 36 компьютер (программа) проверяет наличие сигнала от концевого выключателя 39 (KB), расположенного на конце штока 41 МИУ 38 (фиг.10). Появление этого сигнала является условием для перехода на режим №1. На всех этапах программы МИУ выдвигает свой шток на расстояние, пропорциональное значению δ maх миу=δ mах-Δ δ , которое оно получает от компьютера на этапе 37. Ход штока отрегулирован таким образом, что упорное устройство, упирающееся в шток МИУ, ограничивает ход элементов системы управления рулем высоты и не дает рулю высоты выйти на угол, превышающий (по абсолютному значению) угол, равный Δ δ mах-Δ δ .
Работа устройства выглядит следующим образом.
Устройство работает таким образом, что если отрицательная сумма величин δ и Δ δ будет меньше или равна отрицательной величине δ ’mах, то включится первая ступень ограничения ("режим 1"). При этом величина δ будет ограничена значением δ mах-Δ δ за счет вычитания значения Δ δ к из величины δ в СУС 20 для элсктродистанционной системы управления, либо за счет упирания упора упорного устройства в шток МИУ 38 для механической системы управления. При этом угол атаки самолета по инерции увеличивается как на фиг.6. И в момент времени t3 становится приблизительно равным максимально-допустимому углу атаки α mах. При этом рост угла атаки самолета α прекращается в верхней точке колебательного процесса.
Теоретическая длительность промежутка времени от t2 до t3 равна τ и вычисляется по формуле (8). Момент времени t3 можно определить так же по значению α и его производных (первой и второй) согласно таблице 1. Для того чтобы самолет мог иметь предельный угол атаки в течение необходимого времени, устройство переходит на вторую ступень ограничения (режим №2) в промежуток времени от t3 до t5. Для перехода на вторую ступень ограничения достаточно одной секунды. Переход достигается за счет обнуления величины Δ δ в корректирующем устройстве (КУС) в промежуток времени от t3 до t5. При этом величина δ будет ограничена только величиной δ max за счет вычитания значения Δ δ к из величины δ в СУС (позиция 20), либо за счет упирания упора упорного устройства в шток МИУ. Если летчик нуждается в предельном угле атаки, то он будет задавать предельное положение ОУ. РВ получит свободу хода до значения δ mах. При этом шток упорного устройства упрется в шток МИУ при значении δ , равном δ mах, либо в СУС 20 из значения δ будет вычтена величина Δ δ к, равная (δ -δ mах), (если отрицательное значение δ mах окажется больше, чем отрицательное значение δ ). В момент времени t4 PB будет в положении δ mах. За счет этого угол атаки самолета сохранит свое предельное значение вследствие аэродинамической зависимости α от углового положения РВ δ и вследствие отсутствия инерции роста α (α ’(t)=0).
ВП (позиция 7) представляет собой инерционное звено первого порядка.
ПРУ (позиция 8, фиг.2) управляет коэффициентами К1 и К2, меняя тем самым коэффициент усиления вычислителя К и его постоянную времени Т.
Они обеспечивают 4 режима работы ограничителя:
- рабочий /Р/ - вычисление величины упреждения,
- первый /1/ - включение первой ступени ограничения,
- второй /2/ - переход на вторую ступень ограничения,
- третий /3/ (необязательный) - повышает надежность устройства, замедляя процесс уменьшения выходного сигнала вычислителя.
Условия включения и выключения различных режимов работы ограничителя сведены в таблицу 1:
- Для механической проводки управления: срабатывание концевого выключателя 39 на штоке МИУ 38 (фиг. 10).
- Для электродистанционной проводки управления: появление электрического сигнала Δ δ к<0 от ПУ 16
(фиг.3).
Вместо условия 1а можно использовать условие 1b
- α ’’(t)<0
- α ’(t)<0
- α ≤ α mах
(Переход в режим 2).
1b) Или по длительности режима №1, равной τ (Переход в режим 2).
2) Или: снятие усилий летчиком со штурвала. (На штурвальной колонке можно разместить концевые выключатели, фиксирующие приложение усилий летчиком).
(Переход в режим Р).
- α ’’(t)<0
- α ’(t)<0
- α ≤ α mах
1b) Или по длительности режима №1, равной τ
2) Или: Включение режима Р при росте -Δ δ .(Переход в <Р> при -Δ δ ’(t)>0).
2) Или: Включение режима 3.
Значения коэффициента усиления вычислителя передаточной функции К, его постоянной времени Т, коэффициентов К1 и К2 в зависимости от режима работы ограничителя сведены в таблицу 2:
Способ ограничения предельного угла атаки и вертикальной перегрузки самолета
Способ ограничения предельного угла атаки и вертикальной перегрузки самолета заключается в воздействии КУС 17 на систему управления самолетом. КУС 17 имеет 2 ступени ограничения положения РВ. Величина угла атаки аэродинамически зависит от угла установки РВ δ .
Первая ступень ограничения вводится при положении РВ δ , равном значению δ mах минус значение Δ δ (величина упреждения). Это ограничение с упреждением действует до момента t3 (фиг.6), пока продолжается инерционный рост угла атаки. (Теоретически длительность этого ограничения равна τ ). В момент времени t3 этот рост прекращается. Вторая ступень ограничения вводится в момент времени t3. При этом КУС вводит ограничение на угловое положение РВ δ , равное δ maх. Длительность этого периода (режим №2) может быть равна одной секунде. После выключения второй ступени ограничения КУС 17 переходит в "рабочий" режим “Р”. При этом, если летчик продолжает перемещать ОУ 18 на увеличение угла атаки, в "рабочем" режиме “Р” КУС определяет, что δ меньше или равно значению δ mах минус значение Δ δ (все эти величины отрицательные), и, следовательно, опять включает первую ступень ограничения. Однако при этом значение Δ δ будет равно нулю и, следовательно, значение δ будет равно δ mах. Дальнейший анализ работы этого устройства покажет, что при таких условиях на любом из режимов работы КУС, δ не выйдет за пределы δ mах, а угол атаки самолета α не превысит α mах.
Таким образом КУС воздействует на систему управления самолета так, что на ход РВ вводится ограничение δ mах с упреждением Δ δ . Величина упреждения Δ δ определяется КУС в соответствии с передаточной функцией - инерционное звено первого порядка. Входящая величина этой функции - угловая скорость руля высоты или пропорциональная ей величина (например, угловая скорость органа управления или скорость перемещения любого элемента системы управления рулем высоты).
Коэффициент усиления К и постоянная времени Т передаточной функции W(P) зависят от параметров, указанных в этом описании, которые могут измеряться бортовыми датчиками самолета или же могут быть выбраны постоянными для типового режима полета.
Упреждение Δ δ временное. Время введения и снятия ограничения на управляющий сигнал δ определяется в КУС по принципам, изложенным в этом описании и указанным в таблице 1. Упреждение водится в тот момент, когда значение δ достигает значения δ mах минус Δ δ . Упреждение длится до того момента, пока угол атаки самолета не достигнет верхней точки колебательного процесса, близкой к значению предельного угла атаки (из условия предельно-допустимого угла атаки по аэродинамическим соображениям, либо из условия предельной перегрузки). После снятия (выключения) упреждения на управляющий сигнал δ , управляющий сигнал получает возможность изменения своей величины до значения δ mах (расширяется диапазон). При этом изменение управляющего сигнала до значения δ mах не приводит к увеличению α (угла атаки самолета) выше значения α mах (максимально допустимого α ). Ведь в данном случае α будет уже больше или равно, чем угол атаки, задаваемый рулем высоты α заданное. Так что если α и изменится, то только в сторону уменьшения, т.к. скорость его роста (инерция) уже погашена, а аэродинамические силы (от руля высоты) будут стремиться привести в соответствие α , реальный с α , заданным рулем высоты. А α , заданный рулем высоты, может быть только меньше или равен α mах.
Данный способ можно использовать еще и в виде сигнализации летчику о приближении к предельным углам атаки. При этом в момент времени t2 устройство будет выдавать значение Δ α 1, равное величине заброса угла атаки α выше заданного угла атаки α заднное для момента времени t3. Формула передаточной функции и ее коэффициента усиления примет вид:

K=-R· A· Amz
где Δ α 2 - это величина, равная забросу угла атаки α , выше заданного угла атаки α заданное в момент времени t3, рассчитанная в момент времени t2. На фиг.6 эта величина равна расстоянию от первой ступени ограничения до второй ступени ограничения или расстоянию от линии α до линии α заданное в момент времени t3.
Кроме того, может оказаться самой полезной следующая передаточная функция:

K=-R· (A-1)· Amz
где Δ α 1 - это величина, равная α заданное минус α в текущий момент времени.
В любой момент времени (например, t2) величина Δ α 1+Δ α 2 будет показывать, насколько вырастет угол атаки α , если в этот момент времени остановить движение руля высоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2000 |
|
RU2177897C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА САМОЛЕТА-АМФИБИИ ПРИ ДВИЖЕНИИ ПО ВОДЕ В РЕЖИМЕ ГЛИССИРОВАНИЯ | 2004 |
|
RU2268157C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| БОРТОВАЯ СИСТЕМА КОНТРОЛЯ АВИАДВИГАТЕЛЯ С ОГРАНИЧЕНИЕМ ЧАСТОТЫ ВРАЩЕНИЯ, ТОПЛИВНЫХ ПАРАМЕТРОВ, ДАВЛЕНИЯ И ТЯГИ | 2003 |
|
RU2247847C2 |
| СПОСОБ КОНТРОЛЯ АВИАДВИГАТЕЛЯ | 2003 |
|
RU2249119C2 |

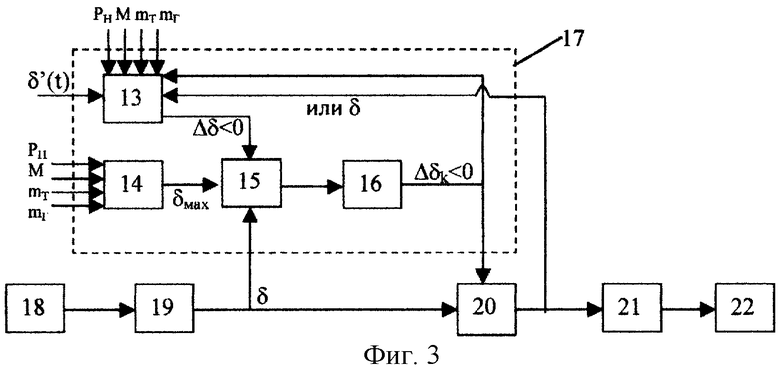
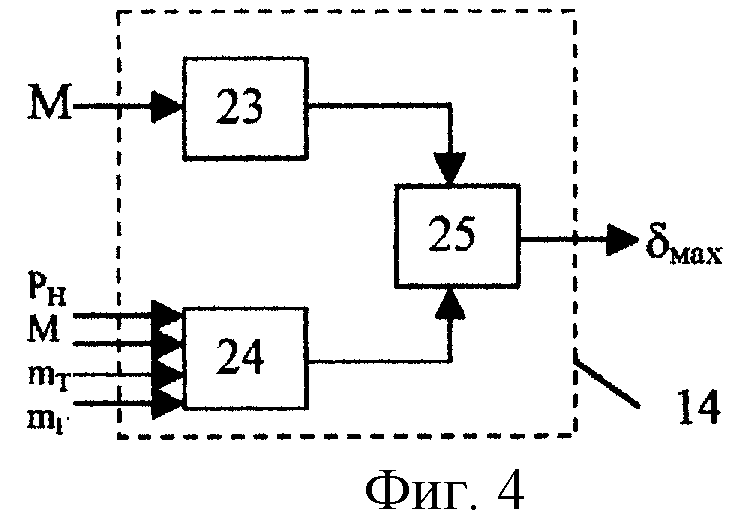

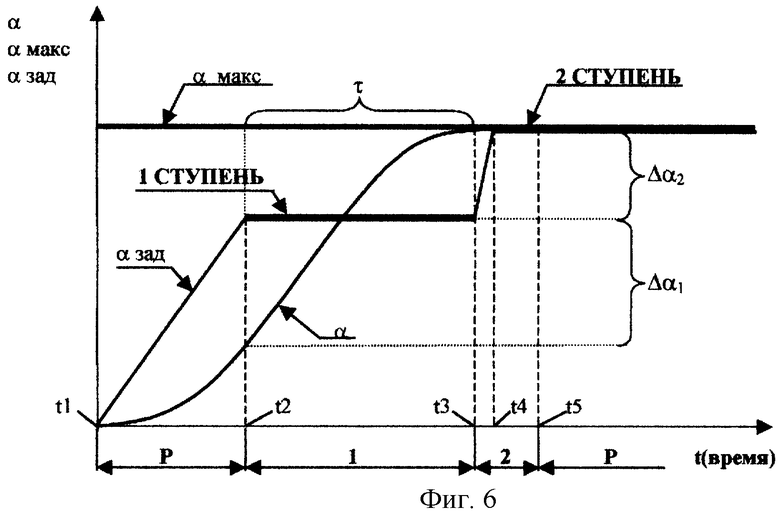
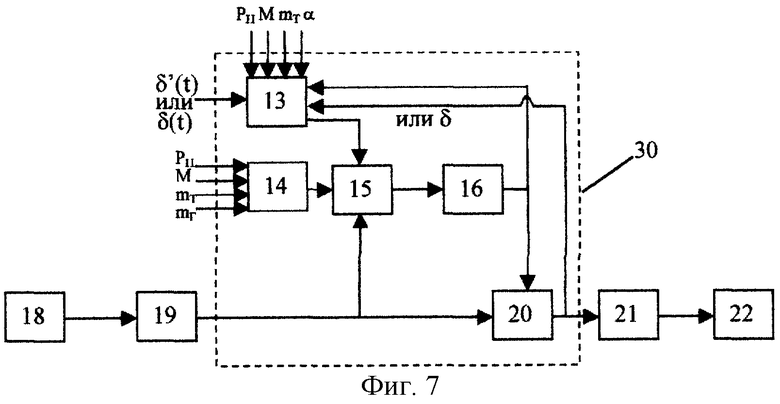
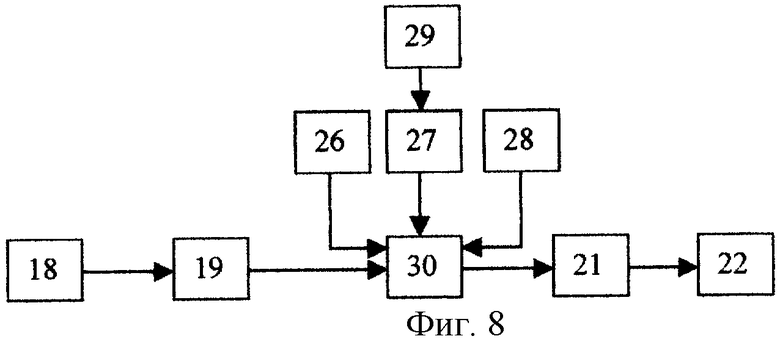
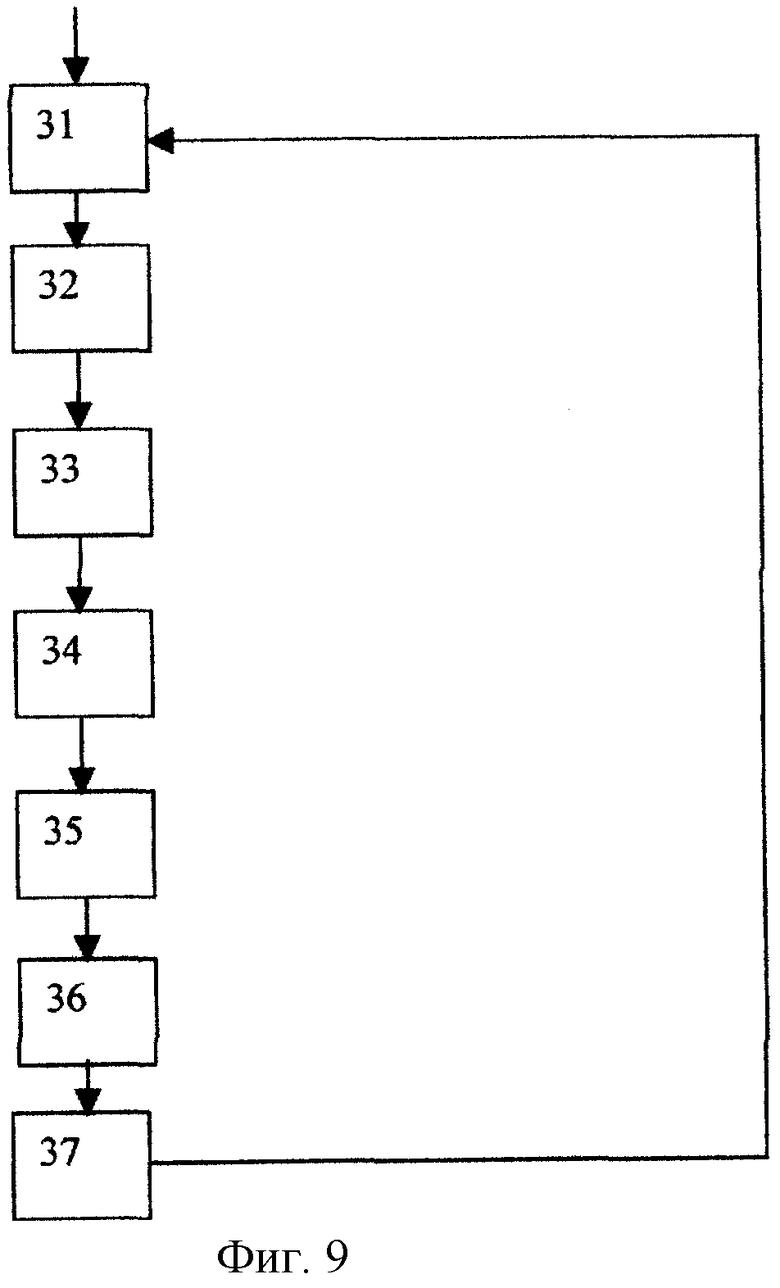
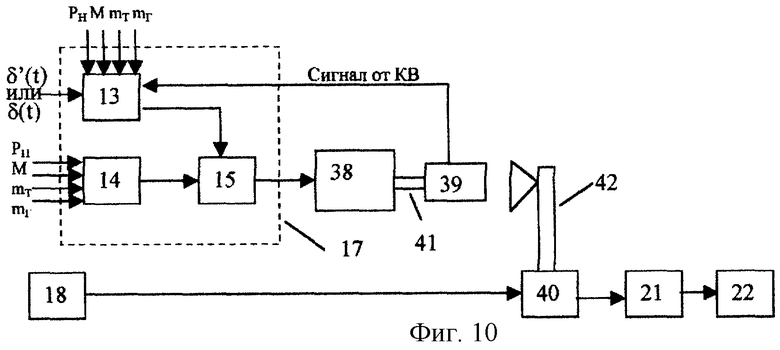
Изобретение относится к способам и устройствам управления самолетом. Устройство содержит корректирующее устройство, вводящее ограничение на управляющий сигнал с упреждением, а величина упреждения вычисляется в корректирующем устройстве по принципу передаточной функции. Способ заключается в том, что на управляющий сигнал системы управления рулем высоты летательного аппарата, идущий от органа управления, который управляет материальным объектом, вводят ограничение с упреждением до момента выхода летательного аппарата на максимальный угол атаки, при этом величину упреждения вычисляют по принципу передаточной функции. Технический результат – повышение безопасности маневрирования самолета. 2 н. и 1 з.п. ф-лы, 10 ил., 2 табл.
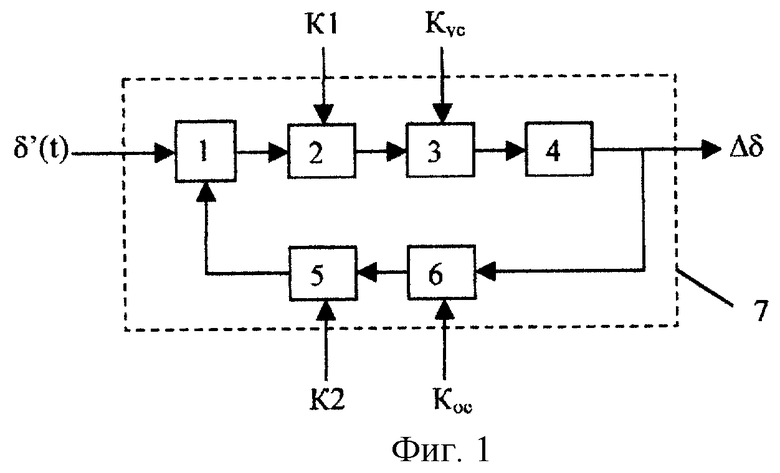
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| RU 94040178 A1, 06.09.1996 | |||
| US 6314343 B1, 06.11.2001 | |||
| US 3463422 A, 30.06.1967. | |||

