Предлагаемое изобретение относится к системам автоматического управления летательными аппаратами (самолет, вертолет, космический корабль) и, в частности к системам автоматического управления посадкой самолетов.
В настоящее время известны различные системы автоматического управления посадкой самолета, обладающие высокой точностью и обеспечивающие повышенную безопасность приземления (см. Агаджанов П.А. и др. Автоматизация самолетовождения и управления воздушным транспортом. М. Транспорт, 1980, с. 87,95,102,103, рис.4,20; Маценко С.П. Системы и средства управления посадкой самолетов, ЦНИИ патентной информации и технико-экономических исследований, М. 1968, с. 17, рис.7; патент США N 3031662, кл. 343-108, 1962).
Наиболее близким к предлагаемому техническому решению системы автоматической посадки самолета является система автоматической посадки Сюд-Лир L-102, используемая на самолете "Каравелла". Структурная схема этой системы представлена в криге "Состояние и направление развития систем обеспечения автоматической посадки самолетов", М. НИИ гражданской авиации, 1972, с. 56, рис. 18.
Известная система автоматической посадки самолета "Каравелла" содержит курсовую систему, гироскопический датчик углов крена и тангажа, датчики угловой скорости по тангажу и крену, курсовой и глиссадный радиоприемники, радиовысотомер, баровысотомер, вычислители курса, крена и канала продольного движения, датчик воздушной скорости, задатчик скорости, вычислитель автомата тяги, сервопривод автомата тяги и автопилот, содержащий сервоприводы с рулевыми приводами в каналах курса, крена и тангажа.
Такой модуль решает задачу автоматической посадки самолета на основании информации, вырабатываемой автономными самолетными измерителями координат (высоты, углов и угловых скоростей), а также курсовым и глиссадным радиоприемниками. При этом для обеспечения безопасности полуавтоматического и автоматического приземления самолета в связи с ограничениями, накладываемыми величиной погрешностей измерения обобщенных координат самолета, а также динамическими характеристиками самолета и системы его управления, указанное приземление возможно только при выполнении достаточно высоких требований по видимости и по допустимому уровню внешних возмущений, действующих на самолет.
При невыполнении этих требований исключается возможность посадки самолета на заданный аэродром, что является существенным недостатком системы-прототипа.
Изобретение направлено на значительное повышение точности выработки навигационных параметров самолета (линейных и угловых координат, их первых и вторых производных) и улучшение динамических характеристик его системы управления, что позволяет значительно снизить требования к уровню видимости и величине внешних возмущений, действующих на самолет при его посадке на аэродром.
Сущность нового технического решения системы автоматической посадки состоит в том, что система, содержащая радиовысотомер, курсовой и глиссадный радиоприемники, сервоприводы с рулевыми приводами в каналах курса, крена и тангажа, а также последовательно соединенные задатчик скорости и вычислитель автомата тяги, выход которого соединен с сервоприводом автомата тяги, согласно изобретению исключает инерционную навигационную систему, приемник спутниковой навигационной системы, блок комлексирования, приемник аэродромной информации, блок определения режима посадки, блок выработки относительных координат, блоки косвенного измерения возмущений бокового движения, крена и продольного движения, задатчики коэффициентов бокового движения, крена и продольного движения, блоки адаптации бокового движения, крена и продольного движения, формирователи адаптивной программы бокового движения, крена и продольного движения, первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры, последовательно соединенные блок управления боковым перемещением и блок управления курсом, блок управления креном, программный блок продольного движения, последовательно соединенные блок управления высотой и блок управления тангажом, при этом первый и второй входы блока комплексирования соединены соответственно с выходами приемника спутниковой навигационной системы и инерциальной навигационной системы, первый, второй, третий, четвертый, пятый и шестой входы приемника спутниковой навигационной системы соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым выходами блока комплексирования, первый, второй, третий и четвертый входы блока выработки относительно координат соединены соответственно с первым, вторым, третьим и четвертым выходами блока комплексирования, пятый вход блока выработки относительных координат соединен с выходом приемника аэродромной информации, выход блока выработки относительных координат соединен с первым входом блока определения режима посадки, второй, третий и четвертый входы которого соединены соответственно с выходами курсового и глиссадного радиоприемников и радиовысотомера, третий выход блока комплексирования соединен с первыми входами задатчиков коэффициентов бокового движения, крена и продольного движения, пятый выход блока комплексирования соединен с первым входом пятого сумматора, его шестой выход с первым входом блока косвенного измерения возмущения крена, с третьим входом блока адаптации крена и с четвертым входом блока управления креном, его седьмой выход со вторыми входами задатчиков коэффициентов бокового движения, крена и продольного движения и со вторым входом вычислителя автомата тяги, первый выход блока определения режима посадки соединен с пятым входом блока управления курсом, с седьмым входом блока адаптации бокового движения и с первыми входами первого сумматора и блока косвенного измерения возмущений бокового движения, второй вход которого соединен с первым входом блока управления боковым перемещением, со вторым выходом блока определения режима посадки и шестым входом блока адаптации бокового движения, третий выход блока определения режима посадки соединен со вторыми входами программного блока продольного движения и формирователя адаптивной программы по крену, с третьими входами формирователей адаптивной программы бокового движения и продольного движения, с четвертым входом вычислителя автомата тяги, с шестым входом блока управления курсом и с пятыми входами блока управления креном и блока управления тангажом, четвертый выход блока определения режима посадки соединен с первым входом блока управления креном, пятый выход блока определения режима посадки соединен с первым входом программного блока продольного движения, шестой выход блока определения режима посадки соединен с первым входом четвертого сумматора, седьмой выход блока определения режима посадки соединен с восьмым входом блока управления тангажом, первый выход блока косвенного измерения возмущений бокового движения соединен с первым входом формирователя адаптивной программы бокового движения, с третьими входами блока адаптации бокового движения и блока управления боковым перемещением, а второй его выход соединен со вторым входом формирователя адаптивной программы бокового движения, с четвертым входом блока адаптации бокового движения и с третьим входом блока управления курсом, третий и четвертый входы блока косвенного измерения возмущений бокового движения соединены соответственно с первым и вторым выходами блока адаптации бокового движения, а пятый его вход соединен с выходом сервопривода курса, первый и второй выходы задатчика коэффициентов бокового движения соединены соответственно с первым и вторым входами блока адаптации бокового движения, первый и второй выходы которого соединены соответственно со вторым входом блока управления боковым перемещением и четвыертым входом блока управления курсом, выход блока управления боковым перемещением соединен также со вторым входом первого сумматора, второй вход блока управления курсом соединен с выходом первого сумматора и с пятым входом блока адаптации бокового движения, а его выход соединен с первым входом второго сумматора, второй вход которого соединен с выходом формирователя адаптивной программы бокового движения, а его выход соединен со входом сервопривода курса, выход задатчика коэффициентов крена соединен с первым входом блока адаптации крена, выход которого соединен со вторыми входами блока управления креном и блока косвенного измерения возмущения крена, третий вход которого соединен с выходом сервопривода крена, а выход соединен с первым входом формирователя адаптивной программы крена, со вторым входом блока адаптации крена и с третьим входом блока управления креном, выход которого соединен с первым входом третьего сумматора, второй вход которого соединен с выходом формирователя адаптивной прогаммы крена, а выход которого соединен со входом сервопривода крена, первый и второй выходы программного блока продольного движения соединены соответственно со вторыми входами четвертого и пятого сумматоров, выход четвертого сумматора соединен с первыми входами блока косвенного измерения возмущений продольного движения и блока управления высотой, шестым входом блока адаптации продольного движения, третьим входом вычислителя автомата тяги и седьмым входом блока управления тангажом, выход пятого сумматора соединен с шестым входом блока управления тангажом, с первым входом шестого сумматора, вторым входом блока косвенного измерения возмущений продольного движения и седьмым входом блока адаптации продольного движения, выход сервопривода тангажа соединен с пятым входом блока косвенного измерения возмущений продольного движения, третий и четвертый входы которого соединены соотетственно со вторыми входами блока управления высотой и блока управления тангажом, а также соединены соответственно с первым и вторым выходами блока адаптации продольного движения, а его первый и второй выходы соединены соответственно с первым и вторым входами формирователя адаптивной программы продольного движения, а также с первым и вторым входами блока адаптации продольного движения, а также соединены соответственно с третьими входами блока управления высотой и блока управления тангажом, третий вход блока адаптации продольного движения соединен с выходом шестого сумматора, с четвертым входом блока управления тангажом, выход которого соединен с первым входом седьмого сумматора, второй вход которого соединен с выходом формирователя адаптивной программы продольного движения, выход седьмого сумматора соединен со входом сервопривода тангажа, второй вход шестого сумматора соединен с выходом блока управления высотой и с первым входом блока управления тангажом, а первый и второй выходы задатчика коэффициентов продольного движения соединены соответственно с четвертым и пятым входами блока адаптации продольного движения.
В предлагаемой системе автоматической посадки самолетов реализуется высокоточная выработка линейных и угловых координат движения самолета и их первых и вторых производных путем комплексирования информации, выраюбатываемой приемником спутниковой навигационной системы и инерциальной навигационной системой, что позволяет совместно с информацией о текущем положении органов управления самолетом осуществить косвенное измерение возмущений, действующих на самолет, а также определение аэродинамических параметров самолета в конкретных условиях полета, что в совокупности, в свою очередь, позволяет снизить требования к погодным условиям в месте приземления, обеспечить высокоточное снижение и приземление самолета по заданной программе.
На чертеже обозначены блоки:
Пр ПСН приемник спутниковой навигационной системы
ИНС инерциальная навигационная система
РВ радиовысотомер
КРП курсовой радиоприемник
ГРП глиссадный радиоприемник
ПАИ приемник аэродромной информации
БК блок комплексирования
БОР блок определения режима посадки
БОК блок выработки относительных координат
БВБ блок косвенного измерения возмущений бокового движения
ЗКБ задатчик коэффициентов бокового движения
БАБ блок адаптации бокового движения
1С первый сумматор
БУК блок управления курсом
ФАПБ формирователь адаптивной программы бокового движения
2С второй сумматор
СПК сервопривод курса
РПК рулевой привод курса
БУП блок управления боковым перемещением
БВКр блок косвенного измерения возмущения крена
БУКр блок управления креном
3С третий сумматор
ФАПКр формирователь адаптивной программы крена
СПКр сервопривод крена
РП Кр рулевой привод крена
4С четвертый сумматор
5С пятый сумматор
ПБП программный блок продольного движения
БВП блок косвенного измеренрия возмущений продольного движения
БАП блок адаптации продольного движения
БУВ блок управления высотой
БУТ блок управления тангажом
ЗКП задатчик коэффициентов продольного движения
6С шестой сумматор
7С седьмой сумматор
ФАПП формирователь адаптивной программы продольного движения
СПТ сервопривод тангажа
РПТ рулевой привод тангажа
ВАТ вычислитель автомата тяги
3С задатчик скорости
СПАТ сервопривод автомата тяги
Система автоматической посадки самолетов содержит приемник 1 спутниковой навигационной системы (см. Бортовые устройства спутниковой радионавигации под редакцией Шебшаевича В.С. М. Транспорт, 1988), состоящий из последовательно соединенных антенны, усилителя высокой частоты, первого смесителя, усилителя промежуточной частоты, второго смесителя, а также из m параллельных цепей, каждая из которых состоит из блока выделения доплеровской частоты, коррелятора и аналого-цифрового преобразователя (АЦП), входы блоков выделения допплеровской частоты объединены и соединены с выходом второго смесителя, выходы АЦП соединены со входами управляющего процессора (УП), управляющие входы корреляторов соединены с выходами генератора кода, управляющие входы смесителей соединены с выходами генератора опорной частоты, приемник имеет шесть входов, соединенных со входами УП и один выход, соединенный с выходом УП; инерциальная навигационная система 2 реализуется, в частности, в бесплатформенном варианте и содержит три акселерометра, три лазерных гироскопа и вычислитель навигационной системы (см. например, Кузовков Н.Т. Салычев О.С. Инерциальная навигация и оптимальная фильтрация. М. Машиностроение, 1982, с. 62) имеет один выход; радиовысотомер 3 (см. Глухов В.В. и др. Авиационное радиоэлектронное оборудование самолетов. М. Транспорт, 1983, с. 138) имеет один выход; курсовой радиоприемник 4 (см. Глухов В.В. и др. Авиационное радиоэлектронное оборудование самолетов. М. Транспорт, 1983, с. 129) имеет один выход; глиссадный радиоприемник 5 (см. Глухов В.В. и др. Авиационное радиоэлектронное оборудование самолетов. М. Транспорт, 1983, с. 129) имеет один выход; приемник 6 аэродромной информации (см. Трояновский А. Д. и др. Бортовое оборудование радиосистем ближней навигации. М. Транспорт, 1990, с. 148), имеет один выход; блок 7 комплексирования представляет набор вычитателей, сумматоров, интеграторов, блоков извлечения корня квадратного и умножителей, выполняющих операции по определенным алгоритмам, имеет два входа и семь выходов; блок 8 выработки относительных координат представляет из себя набор тригонометрических преобразователей, сумматоров, блоков извлечения корня квадратного и умножителей, работающих по определенному алгоритму, имеет пять входов и один выход; блок 9 определения режима посадки представляет из себя набор пороговых блоков, управляемых ключей, схем ИЛИ, имеет четыре входа и семь выходов; блок 10 косвенного измерения возмущений бокового движения, представляет набор сумматоров и умножителей, работающих по определенному алгоритму, имеет пять входов и два выхода; задатчик 11 коэффициентов бокового движения представляет постоянное запоминающее устройство и набор пороговых блоков, коммутирующих выходы этого устройства, и имеет два выхода; блок 12 адаптации бокового движения представляет из себя набор сумматоров, интеграторов, умножителей, работающих по определенному алгоритму, имеет семь входов и два выхода; первый сумматор 13 имеет два входа и один выход; блок 14 управления боковым перемещением представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет три входа и один выход; блок 15 косвенного измерения возмущения крена представляет набор сумматоров и умножителей, работающих по определенному алгоритму, имеет три входа и один выход; задатчик 16 коэффициентов крена представляет постоянное запоминающее устройство и набор пороговых блоков, коммутирующих выходы этого устройства, имеет два входа и один выход; блок 17 адаптации крена представляет из себя набор сумматоров, интеграторов, умножителей, работающих по определенному алгоритму, имеет три входа и один выход; четвертый сумматор 18 имеет два входа и один выход; пятый сумматор 19 имеет два входа и один выход; программный блок 20 продольного движения представляет из себя постоянное запоминающее устройство, набор пороговых блоков, блок масштабирования и апериодическое звено, выходы которых коммутируются по команде, имеет два входа и два выхода; блок 21 косвенного измерения возмущений продольного движения представляет набор сумматоров и умножителей, работающих по определенному алгоритму, имеет пять входов и два выхода; блок 22 управления высотой представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет три входа и один выход; блок 23 адаптации продольного движения представляет из себя набор сумматоров, интеграторов и умножителей, работающих по определенному алгоритму, имеет семь входов и два выхода; шестой сумматор 24 имеет два входа и один выход; задатчик 25 скорости представляет из себя постоянное запоминающее устройство, имеет один выход; формирователь 26 адаптивной программы бокового движения, представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет три входа и один выход; блок 27 управления курсом представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет шесть входов и один выход; формирователь 28 адаптивной программы по крену представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет два входа и один выход; блок 29 управления креном представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет пять входов и один выход; задатчик 30 коэффициентов продольного движения представляет из себя набор пороговых блоков и постоянное запоминающее устройство, выходы которого коммутируются по командам, имеет два входа и два выхода; блок 31 управления тангажом представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, итмеет восемь входов и один выход; вычислитель 32 автомата тяги представляет из себя набор блоков масштабирования, вычитателей, пороговых элементов, логических элементов и управляемый переключатель, имеет четыре входа и один выход; второй сумматор 33 имеет два входа и один выход; третий сумматор 34 имеет два входа и один выход; формирователь 35 адаптивной программы продольного движения представляет из себя набор сумматоров и умножителей, работающих по определенному алгоритму, имеет три входа и один выход; седьмой сумматор 36 имеет два входа и один выход; сервопривод 37 автомата тяги имеет один вход; сервопривод 38 курса имеет один вход и два выхода, один из которых механическая связь с рулевым приводом 41 курса; сервопривод 39 крена имеет один вход и два выхода, один из которых механическая связь с рулевым приводом 40 крена; сервопривод 40 тангажа имеет один вход и два выхода, один из которых механическая связь с рулевым приводом 43 тангажа.
Указанные блоки связаны между собой следующим образом:
Первый, второй, третий, четвертый, пятый и шестой входы приемника 1 спутниковой навигационной системы соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым выходами блока 7 комплексирования. Первый и второй входы блока 7 соединены соответственно с выходами Пр СНС 1 и инерциальной навигационной системы 2. Первый, второй, третий и четвертый выходы БК7 соединены также с первым, вторым, третьим и четвертым входами блока 8 выработки относительных координат. Третий выход БК7 соединен также с первыми входами ЗКБ11, ЗККр16 и ЗКП 30. Пятый выход БК7 соединен также с первым входом пятого сумматора 19. Шестой выход БК 7 соединен также с перым входом БВ Кр 15, с третьим входом БАКр17 и с четвертым входом БУКр29. Седьмой выход БК7 соединен со вторыми входами ЗКБ11, ЗККр16, ЗКП30 и ВАТ32. Выход РВ3 соединен с четвертым входом БОР9. Выход ПАИ 6 соединен с пятым входом БОК 8. Выход БОК 8 соединен с первым входом БОР 9. Второй и третий входы БОР 9 соединены соответственно с выходами КРП 4 и ГРП 5. Первый выход БОР 9 соединен с первыми входами БВБ 10 и первого сумматора 13, седьмым входом БАБ 12 и пятым входом БУК 27. Второй выход БОР 9 соединен со вторым входом БВБ 10, шестым входом БАБ 12 и первым входом БУП 14. Третий выход БОР 9 соединен с третьими входами ФАПБ 26 и ФАПП 35, вторым входом ФАППКр 28, четвертым входом ВАТ 32, шестым входом БУК 27, пятыми входами БУКр 29 и БУТ 31 и вторым входом ПБП 20. Четвертый выход БОР 9 соединен с первым входом БУКр 29. Пятый выход БОР 9 соединен с первым входом ПБП 20. Шестой выход БОР 9 соединен с первым входом четвертого сумматора 18. Седьмой выход БОР 9 соединен с восьмым входом БУТ 31. Третий вход БВБ 10 соединен с первым выходом БАБ 12 и со вторым входом БУП 14. Четвертый вход БВБ 10 соединен со вторым выходом БАБ 12 и с четвертым входом БУК 27. Пятый вход БВБ 10 соединен с выходом СПК 38. Первый выход БВБ 10 соединен с третьим входом БАБ 12, с первым входом ФАПБ 26 и с третьим входом БУП 14. Второй выход БАБ 10 соединен с четвертым входом БАБ 12, со вторым входом ФАПБ 26 и с третьим входом БУК 27. Первый и второй выходы ЗКБ 11 соединены соответственно с первым и вторым входами БАБ 12. Пятый вход БАБ 12 соединен с выходом первого сумматора 13 и со вторым входом БУК 27. Второй вход первого сумматора 13 соединен с выходом БУП 14 и с первым входом БУК 27. Выход БУК 27 соединен с первым входом второго сумматора 33, второй вход которого соединен с выходом ФАПБ 26. Выход второго сумматора 33 соединен со входом СПК 38. Второй вход БВКр 15 соединен с выходом БАКр 17 и со вторым входом БУКр 29. Третий вход БВКр 15 соединен с выходом СПКр 39. Выход БВКр 15 соединен с третьим входом БУКр 29, со вторым входом БАКр 17 и с первым входом ФАПКр 28. Выход ЗККр 16 соединен с первым входом БАКр 17. Выход БУКр 29 соединен с первым входом третьего сумматора 34, второй вход которого соединен с выходом ФАПКр 28. Выход третьего сумматора 34 соединен со входом сервопривода 39. Вторые входы четвертого сумматора 18 и пятого сумматора 19 соединены соответственно с первым и вторым выходами ПБП 20. Выход четвертого сумматора 18 соединен с первыми входами БВП 21 и БУВ 22, с седьмым входом БУТ 31, с третьим входом ВАТ 32 и шестым входом БАП 23. Выход пятого сумматора 19 соединен с первым входом шестого сумматора 24, со вторым входом БВП 21, седьмым входом БАП 23 и шестым входом БУТ 31. Третий вход БВП 21 соединен с первым выходом БАП 23 и вторым входом БУВ 22. Четвертый вход БВП 21 соединен со вторым выходом БАП 23 и вторым входом БУТ 31. Пятый вход БВП 21 соединен с выходом СПТ 40. Первый выход БВП 21 соединен с третьим входом БУВ 22, первым входом БАП 23 и первым входом ФАПП 35. Второй выход БВП 21 соединен со вторым входом БАП 23, вторым входом ФАПП 35 и третьим входом БУТ 31. Третий вход блока адаптации 23 соединен с выходом шестого сумматора 24 и четвертым входом БУТ 31. Четвертый и пятый входы БАП 23 соединены соответственно с первым и вторым выходами ЗКП 30. Выход БУВ 22 соединен со вторым входом шестого сумматора 24 и первым входом БУТ 31. Выход БУТ 31 соединен с первым входом седьмого сумматора 36, второй вход которого соединен с выходом ФАПП 35. Выход седьмого сумматора 36 соединен со входом сервопривода 40. Выход задатчика 25 скорости соединен с первым входом ВАТ 32, выход которого соединен с первым входом ВАТ 32, выход которого соединен со входом СПАТ 37. Сервоприводы 38, 39 и 40 механически связаны с соответствующими рулевыми приводами 41, 42 и 43.
Система автоматической посадки самолета работает следующим образом:
Датчики информации, входящие в состав ИНС 2, вырабатывают первичную информацию о составляющих векторов линейного и углового ускорений, линейной и угловой скорости, а также о значениях трех углов поворота самолета. Указанная информация обрабатывается вычислителем ИНС по стандартным алгоритмам, в результате чего вырабатываются параметры линейного движения самолета в географической системе координат ОХYZ и параметры углового движения самолета относительно сопровождающей системы координат OXcYcZc (ось OYс направлена по вертикали места, ось ОХс на север); сигналы угловых скоростей и ускорений относительно связанной системы координат. При этом на выходе ИНС вырабатываются сигналы по линейным продольным параметрам Xи, ,
,  , сигналы по линейным боковым параметрам Zи,
, сигналы по линейным боковым параметрам Zи, ,
,  , сигналы по линейным вертикальным параметрам Yи,
, сигналы по линейным вертикальным параметрам Yи,  ,
,  , сигналы курса Ψи крена γи и тангажа νи сигналы угловых скоростей и ускорений относительно продольной оси ωxи,
, сигналы курса Ψи крена γи и тангажа νи сигналы угловых скоростей и ускорений относительно продольной оси ωxи, боковой оси ωz,
боковой оси ωz, нормальной оси ωyи,
нормальной оси ωyи, Одновременно приемник 1 СНС осуществляет прием и обработку сигналов, передаваемых навигационными ИСЗ. При этом на выходе приемника 1 вырабатываются в момент сеанса связи с ИС3 сигналы линейных координат самолета и их первых производных
Одновременно приемник 1 СНС осуществляет прием и обработку сигналов, передаваемых навигационными ИСЗ. При этом на выходе приемника 1 вырабатываются в момент сеанса связи с ИС3 сигналы линейных координат самолета и их первых производных
Xсп,  Zсп,
Zсп,  , Yсп,
, Yсп, 
Идентичные сигналы, вырабатываемые Пр СНС 1 и ИНС 2 отличаются характерои ошибок: ошибки измерения ИНС параметров движения самолета носят накапливающийся со временем характер, а ошибки выработки Пр СНС 1 сигналов линейных скоростей характеризуются зависимостью от динамики движения самолета.
В ВБК 7 осуществляется комплексирование измерений ПрСНС 1 и ИНС 2 с целью повышения точности выработанных ИНС 2 параметров движения. Установлено, что ошибка ИНС может быть представлена выражением, которое содержит тригонометрические члены с Шулеровским и суточным периодами и их комбинации и имеет вид:
ΔAi aio + ai1cosUt + ai2sinUt + ai3cos( ν U)t + ai4sin( ν U)t + ai5cosν t + ai6sin ν t + +ai7cos( ν + U)t + ai8sin( ν + U)t + δai (i 1,2,6) где ΔAi погрешность измерения ИНС каждой из трех географических координат и трех составляющих вектора скорости
ΔA1= ΔXи, ΔA2= ΔYи, ΔA3= ΔZи, ΔA4=  , ΔA5=
, ΔA5=  , ΔA6=
, ΔA6=  , где ν
, где ν
круговая частота, соответствующая периоду Шулера,
U круговая частота, соответствующая суточному периоду,
δai случайная составляющая,
aik интегральные параметры, подлежащие определению (i 1,6, k 0,1, 8),
В БК 7 реализуется методика оценки погрешностей шести параметров выработанных ИНС (трех координат и трех проекций линейной скорости) путем определения 9 интегральных параметров по каждой из шести погрешностей методом наименьших квадратов и последующим определением этих погрешностей в соответствии с выражением (1), как заданных функций времени.
В соответствии с методом наименьших квадратов интегральные параметры aik (i=1,2, 6; k=0,1, 8) могут быть определены путем решения следующей алгебраической системы уравнений: Для первой погрешности (погрешность ΔА1) эта система имеет вид:
1. +a11
+a11 cosUτdτ+
cosUτdτ+
 sinUτdτ+
sinUτdτ+
 cos(ν-U)τdτ +
cos(ν-U)τdτ +
+ 
 sin(ν-U)τdτ+
sin(ν-U)τdτ+
 cosντdτ+
cosντdτ+
 sinντdτ+
sinντdτ+
 cos(ν+U)τdτ+
cos(ν+U)τdτ+ 
 sin(ν+U)τdτ
sin(ν+U)τdτ  A1(τ)dτ,
A1(τ)dτ,
2.
 cosUτdτ+
cosUτdτ+
 cos2Uτdτ+
cos2Uτdτ+
 sinUτcosUτdτ+
sinUτcosUτdτ+
+
 cos(ν-U)τ cosUτdτ+
cos(ν-U)τ cosUτdτ+
 sin(ν-U)τ cosUτdτ+
sin(ν-U)τ cosUτdτ+
+
 cosντ cosUτdτ+
cosντ cosUτdτ+
 sinντ cosUτdτ+
sinντ cosUτdτ+
 cos(ν+U)τ cosUτdτ+
cos(ν+U)τ cosUτdτ+  s
s n
n U
U c
c s
s =
= A
A (
( )
) c
c s
s












9.
 sin(ν+U)τdτ+
sin(ν+U)τdτ+
 cosUτ sin(ν+U)τdτ+
cosUτ sin(ν+U)τdτ+
 sin(ν+U)τdτ+ +
sin(ν+U)τdτ+ +
 cos(ν-U)τ sin(ν+U)Uτdτ+
cos(ν-U)τ sin(ν+U)Uτdτ+
 sin(ν-U)τ sin(ν+U)τdτ+
sin(ν-U)τ sin(ν+U)τdτ+
+
 cosντ sin(ν+U)τdτ+
cosντ sin(ν+U)τdτ+
 sinντ sin(ν+U)τdτ+
sinντ sin(ν+U)τdτ+
+
 cos(ν+U)τ sin(ν+U)τdτ+
cos(ν+U)τ sin(ν+U)τdτ+
 sin2(ν+U)τdτ
sin2(ν+U)τdτ A1(τ) sin(ν+U)τdτ (2) где
A1(τ) sin(ν+U)τdτ (2) где  (К 0,8) оценки параметров aik(K 0,8)
(К 0,8) оценки параметров aik(K 0,8)
Т период наблюдения
ΔAi(t) Aспi Aпi величина, вырабатываемая в БК 7 (=1,6) Аспi и Aпi значение одной из трех географических координат и трех составляющих линейной скорости, выработанных Пр СНС 1 и ИНС 2 соответственно.
Аналогично системе уравнений (2) записываются системы уравнений для других пяти погрешностей ΔАi(i 2,3,6). Таким образом в БК 7 производится оценка 54 интегральных параметров (шесть систем уравнений по 9 уравнений в каждой).
После определения в БК 7 интегральных параметров (i 1,6; К 0,8) в этом же блоке производится умножение каждого из определенных параметров на соответствующую функцию времени в соответствии с уравнением (1). Выработанные сигналы оценок каждой из шести погрешностей инерциальной системы (три координаты места и три проекции вектора скорости) суммируются с соответствующими выходными сигналами ИНС.
Кроме коррекции указанных сигналов в БК 7 производится коррекция физических параметров, вырабатываемых ИНС:
трех угловых координат (курса Ψ тангажа ν и крена γ ).
трех проекций угловой скорости на связанные оси ωx,ωy,ωz
трех проекций углового ускорения на связанные оси  ,
,  ,
, 
трех проекций линейного ускорения судна  ,
,  ,
,  на оси географической системы координат.
на оси географической системы координат.
Оценка данных физических параметров, не наблюдаемых с помощью Пр СНС 1, производится путем выработки оценок погрешностей этих параметров, а именно:
погрешностей измерения трех углов ориентации судна (dΨ dν dγ );
погрешностей измерения трех проекций угловой скорости и углового ускорения на связанные оси (dωx, dωy, dωz, d , d
, d , d
, d );
);
смещение нуля каждого из трех акселерометров (d , d
, d , d
, d );
);
погрешностей масштабного коэффициента каждого из трех акселерометра (dmx, dmy, dmz).
Установлено, что погрешности физических параметров связаны с интегральными параметрами посредством следующих зависимостей
dν
 f
f
(dν= d ωx,d , dmx,)
, dmx,)
fik(ν)- априорно заданные численные коэффициенты.
Определение коэффициентовfik(ν) производится следующим образом. Интегральные параметры aik являются известными аналитическими функциями одного или нескольких физических параметров. Указанные аналитические зависимости устанавливаются при интегрировании уравнений возмущенного движения. После определения этих зависимостей аналитически решается обратная задача определения зависимостей каждого из физических параметров от одного или нескольких интегральных параметров. Коэффициенты при каждом интегральном параметре aik в выражении для ν -ого физического параметра являются коэффициентами fik(ν).
В БК 7 производится периодическое (с периодом, равным интервалу наблюдения Т) вычисление оценок погрешностей физических параметров dν запоминание их на интервале наблюдения Т и замещение оценок, выработанных на предыдущем интервале наблюдения, В БК 7 осуществляется коррекция физических параметров ИНС по следующим формулам: = (
= ( +d
+d )(mx+dmx),
)(mx+dmx),  = (
= ( +d
+d )(my+dmy),
)(my+dmy),  = (
= ( +d
+d )(mz+dmz)
)(mz+dmz)
ωx= ωxи+dωx, ωy= ωyи+dωy, ωz= ωzи+dωz, =
=  +d
+d ,
,  =
=  +d
+d ,
,  =
=  +d
+d
Ψ= Ψи+dΨ, ν= νи+dν, γ= γи+dγ (3) где d , d
, d , d
, d , dmx, dmy, dmz, dω x, dω y, dωz, d
, dmx, dmy, dmz, dω x, dω y, dωz, d , d
, d , d
, d , dΨ dγ dν оценки физических параметров ИНС.
, dΨ dγ dν оценки физических параметров ИНС.
(Здесь и далее индекс "С" при линейном параметре обозначает самолетный).
В БК 7 производится определение углов курса Ψ тангажа ν и крена γ а также их производных по времени путем интегрирования системы трех кинематических уравнений
ωx=  +
+ sinν
sinν
ωy=  cosν cosγ-
cosν cosγ- sinγ (4)
sinγ (4)
ωz= - cosν sinγ-
cosν sinγ- cosγ
cosγ
В результате реализации в БК 7 алгоритмов 1-4 производится коррекция выработанных ИНС значений всех линейных (в географической системе координат) и угловых параметров движения самолета, что обеспечивает получение точной информации об этих параметрах не только в моменты сеанса связи с ИСЗ, но и в интервалах между сеансами связи.
В БК 7 производится также определение модуля линейной скорости по формуле:
v ( +
+ +
+ )1/2
)1/2
Откорректированные сигналы параметров линейного и углового движения самолета поступают на следующие выходы БК 7:
на первый выход БК 7 поступают сигналы Xc, ,
, 
на второй выход БК 7 поступают сигналы Zc, ,
, 
на третий выход БК 7 поступают сигналы Yc, ,
, 
на четвертый выход БК 7 поступают сигналы Ψ, ,
, 
на пятый выход БК 7 поступают сигналы ν, ,
, 
на шестой выход БК 7 поступают сигналы γ, ,
, 
на седьмой выход БК 7 поступают сигнал модуля скорости Y
Выходные сигналы БК 7 поступают на входы Пр СНС 1, где они используются для решения следующих задач:
угловой ориентации к стабилизации антенны приемника или для управления фазовой антенной решеткой
высокоточного стробирования и компенсации динамической ошибки при выделении допплеровской частоты.
Решение этих задач осуществляется следующим образом.
В состав управляющего процессора включен цифроимпульсный преобразователь, на выходе которого по значениям дальности и производной от дальности вырабатываются стробирующие импульсы для управления блоками измерения этих параметров. Эти сигналы поступают на входы коррелятора и блока выделения допплеровского смещения. Ведение опорных стробирующих сигналов в приемнике позволяет существенно упростить аппаратуру приемника за счет сокращения числа каналов, осуществляющих поиск сигнала спутника по относительной дальности и относительной скорости движения. С другого выхода управляющего процессора на вход антенны поступают сигналы управления диаграммой направленности фазовой антенной решетки, вырабатываемые управляющим процессором по сигналам угловой ориентации спутника относительно судна и выходным сигналам БК 7.
Высокоточные значения навигационных параметров полета, выработанные БК 7, используются также для выработки координат самолета в относительной системе координат, связанной с ВПП. С этой целью сигналы с первых четырех выходов БК 7 поступают на первые четыре входа БОК 8 соответственно. На пятый вход БОК 8 с выхода ПАИ 6 при движении самолета по направлениям, задаваемым курсовым и глиссадным радиомаяками, поступает следующая аэродромная информация о координатах ВПП в географической системе координат, полученная на аэродроме от навигационных ИСЗ:
1. Значение угла α между осью ВПП и осью х географической системы координат.
2. Значения линейных координат начала ВПП Xп, Yп, Zп в географической системе координат.
3. Значения линейных координат курсового радиомаяка Xк, Yк, Zк и глиссадного радиомаяка Хг, Yг, Zг.
При поступлении аэродромной информации в БОК 8 производится выработка относительных координат самолета в системе координат связанной с ВПП. Выработанные относительные координаты самолета обладают повышенной точностью, превосходящей приблизительно на два порядка точности выработки абсолютных координат самолета или ВПП с помощью спутниковых систем. Это достигается взаимным уничтожением при вычитании абсолютных координат ВПП из абсолютных координат самолета значительного числа составляющих ошибок, присутствующих при выработке абсолютных координат каждого из объектов с помощью спутниковых систем.
Выработка относительных координат самолета производится в БОК 8 по следующим алгоритмам:
X (Xc Xп) cosα + (Zc Zп)sinα
Z (Xc Xп) sinα (Zc Zп)cosα (5)
Y Yc Yп
D (X2 + Y2 + Z2)1/2
χc= arcsin 
ηc= arcsin 
ϕ= Ψ-Ψo где x, y, z координаты самолета в системе координат, связанной с ВПП (ось Ох вдоль оси ВПП, Оz перпендикулярно оси ОХ вправо, ось Oy вертикально вверх, 0 начало ВПП),
Z относительное боковое смещение самолета,
Y относительная высота самолета;
D относительная дальность самолета от начала ВПП,
Ψo значение угла курса самолета в момент начала выработки, относительных координат (момент поступления аэродромной информации);
Ψ текущее значение угла курса самолета;
ϕ изменение угла курса самолета с момента поступления, аэродромной информации;
χс счисленное значение курсового угла курсового радиомаяка;
ηс счисленное значение угла места глиссадного радиомаяка.
Информация об относительных линейных координатах самолета Y, Z и их производных, относительной дальности D, о счисленных угловых координатах радиомаяков χсηс и об изменении ϕ угла курса и его производных поступает на выход БОК 8 (Производные линейных относительных координат Y, Z и угла ϕ равны соответствующим производным соответствующих координат Yc, Zc, Ψ вырабатываемым БК 7 и поступающим транзитом на выходы Б 8). Высокоточная информация, вырабатываемая БК 6 и БОК 8 о параметрах линейного и углового движения самолета используется в системе управления самолетом при повышении точности и надежности автоматической посадки по ряду направлений. Прежде всего, она используется в БОР 9 для цепей самоконтроля этой информации (т.е. для определения ее достоверности) путем сравнения счисленного значения курсового угла χcкурсового радиомаяка и курсового угла χи измеренного КРП 4 и поступившего на второй вход БОР 9, а также путем сравнения счисленного угла места ηс глиссадного радиомаяка с сигналом угла места глиссадного радиомаяка, выработанного ГРП 5 и поступившим на третий вход БОР 9. Выработанные в результате сравнения разности Δ χ, Δh являются алгебраическими суммами погрешностей измерения и погрешностей счисления соответствующих углов. Если хотя бы одна из указанных разностей ( Δ χ или Δh ) превосходит допустимый порог, равный сумме предельных погрешностей измерения и счисления, это является признаком неисправности в системе выработки информации о географических координатах самолета или радиомаяков, например, вследствие потери контакта с ИСЗ. При этом на третьем выходе БОР 9 вырабатывается команда, поступающая на входы ВАТ 3у2, БУТ 31, ФАПП 35, БУК 27, ФАПБ 26, БУКр 29, ФАПКр 28, ПБП 20. При наличии этой команды вводится нештатный режим работы заявляемой системы, т. е. реализуется закон управления, используемый в системе-прототипе. При этом в качестве управляющих сигналов используются сигналы курсового угла χи и угла места ηи выработанные КРП 4 и ГРП 5 соответственно и поступившие на четвертый и седьмой выходы БОР 9, а также сигнал высоты, выработанный РВ 3 и поступивший на шестой выход БОР 9, а сигналы относительных координат самолета D, Z, Y снимаются с выходов БОР 9. При отсутствии этой команды вводится штатный режим. При этом на первый, второй и шестой выходы БОР 9 поступают соответственно сигналы относительных координат ϕ, Z, Y и их производных, а на пятый выход БОР 9 поступает сигнал относительной дальности Д. Описание нештатного и штатного режимов приведены ниже.
Высокоточная информация, вырабатываемая в БК 6 и БОК 8 используется в каналах управления боковым движением (каналы курсах, крена и бокового перемещения) и продольным движением (каналы тангажа и высоты) для косвенного измерения внешних возмущений, действующих на самолет, с целью последующей компенсации влияния этих возмущений.
В канале управления боковым движением это измерение осуществляется после выполнения следующих операций.
При заходе самолета на посадку курсовым радиоприемником 4 производится прием сигналов, передаваемых курсовым радиомаяком. При этом на выходе курсового радиоприемника 4 вырабатывается сигнал курсового угла этого радиомаяка, т.е. угла между продольной осью самолета и линией визирования радиомаяка. Указанный сигнал через БОР 9 поступает на вход блока 29 управления креном. Блок 29 вырабатывает управляющий сигнал, вызывающий крен самолета, в результате чего происходит перемещение самолета на направление, задаваемое курсовым радиомаяком. В момент перемещения на это направление курсовой угол радиомаяка становится равным нулю, а следовательно, становится равным нулю и управляющий сигнал по крену, вырабатываемый БУКр 29. При движении самолета по заданному направлению на борт самолета поступает аэродромная информация, состав которой был описан выше. С этого момента управление боковым движением самолета в штатном режиме осуществляется на основании бокового отклонения самолета от счисленной вертикальной плоскости полета и результатов измерения сил и моментов, действующих на самолет. Косвенное измерение сил и моментов, осуществляемое блоками БВБ 10, БВКр 15, БВП 21, основывается на том, что их можно определить как разность инерционных и управляющих сил и моментов соответственно. Инерционные силы и моменты определяются по выходным сигналам блока 7 комплексирования в связанной с корпусом самолета системе координат OXcYcZc, начало которой совпадает с местом установки ИНС. Составляющие в этой системе координат главного вектора  инерционных сил имеют следующие выражения:
инерционных сил имеют следующие выражения:
Fих МWx
Fиу MWy (6)
Fиz MWz где М масса самолета
Wx,Wy,Wz составляющие вектора абсолютного линейного ускорения центра масс самолета по осям трехгранника ОXcYcZc.
Составляющие в системе координат OXcYcZс главного момента L инерционных сил относительно точки О имеют следующие выражения
Lux=  (Ixωx-Ixyωy-Ixzωz)+ωy(-Ixzωx-Iyzωy+Izωz)-
(Ixωx-Ixyωy-Ixzωz)+ωy(-Ixzωx-Iyzωy+Izωz)-
-ωz(-Ixyωx+Iyωy-Iyzωz)+M(lxWy-lyWz)
Luy=  (-Ixyωx+Iyωy-Iyzωz)+ωz(Ixωx-Ixyωy-Ixzωz)- (7)
(-Ixyωx+Iyωy-Iyzωz)+ωz(Ixωx-Ixyωy-Ixzωz)- (7)
-ωz(-Ixzωx-Iyzωy+Izωz)+M(lyWz-lzWx)
Luz=  (-Ixzωx-Iyzωy+Izωz)+ωx(-Ixyωx+Iyωy-Iyzωz)-
(-Ixzωx-Iyzωy+Izωz)+ωx(-Ixyωx+Iyωy-Iyzωz)-
-ωy(Ixωx-Ixyωy-Ixzωz)+M(lzWx-lxWy) где Ix,Iy,Iz,Ixy,Ixz,Iyz моменты инерции и центробежные моменты инерции самолета в системе координат OxcYcZc.
lx, ly, lz составляющие вектора  , проведенного из 0 к центру масс самолета.
, проведенного из 0 к центру масс самолета.
ωx,ωy,ωz проекции на оси трехгранника OXcYcZc вектора  абсолютной угловой скорости вращения корпуса самолета.
абсолютной угловой скорости вращения корпуса самолета.
Упрощенные выражения инерционных сил и моментов для частных случаев приведены в книге Ремц Ю.В. Качка корабля. Л. Судостроение, 1983, с. 22. Полученные из приведенных выше уравнений упрощенные выражения для инерционной силы fz(t) и инерционного момента L ϕ(t) для канала управления боковым движением самолета при заходе на посадку, когда влиянием крена на боковое движение можно пренебречь, имеет вид: +q
+q +r
+r fz(t)
fz(t) +q
+q +r
+r Lϕ(t) (8) где Z боковое линейное отклонение самолета от оси ВПП (относительное боковое перемещение).
Lϕ(t) (8) где Z боковое линейное отклонение самолета от оси ВПП (относительное боковое перемещение).
ϕ угловое отклонение в горизонтальной плоскости продольной оси самолета относительно оси ВПП (изменения угла курса самолета).
q21,r21,q31,r31 коэффициенты естественного демпфирования.
В канале крена самолета выражение для инерционного момента совпадают со вторым уравнением системы (8), если параметр ϕ заменить на параметр γ (угол крена самолета), а инерционный момент Lϕ (t) на инерционный момент L γ (t).
В канале управления продольным движением выражения для инерционных сил и инерционных моментов совпадают с соответствующими уравнениями системы (8), если параметр Z заменить на параметр η (отклонение высоты полета от программ, а параметр ϕ на параметр ν (отклонение угла тангажа от программы) силу fz(t) на fη(t), а момент Lϕ (t) на Lν (t).
Управляющие моменты в каналах курса, крена и тангажа создаются соответствующими рулевыми механизмами, а информация о величине управляющего момента определяется по сигналу датчика обратной связи сервопривода соответствующего канала. Величина управляющего момента в каждом из каналов определяется выражением:
Myi ρiδi где ρi коэффициент пропорциональности
δi угол отклонения руля
i индекс канала;
i к для канала курса; i кр для канала крена; i т для канала тангажа.
Управляющие силы в каналах самолета при движении по прямой в направлении на ВПП отсутствуют. На основании проведенных выше выражений для инерционных и управляющих сил и моментов в каждом из каналов предлагаемой системы производится косвенное измерение возмущающих сил и моментов как алгебраической суммы инерционных сил или моментов и соответствующих управляющих сил или моментов. В канале управления боковым движением косвенное измерение возмущающей силы и момента осуществляется блоком 10. На входы этого блока с выхода БОР9 поступает информация о линейных и угловых скоростях и ускорениях бокового движения самолета  ,
,  ,
,  ,
,  и информация с выхода СПК 37 о величине отклонения руля курса (управляющем сигнале по курсу). После снятия сигнала с выхода КРП 4 движение самолета начинает совершаться по заданному направлению на ВПП. При этом можно пренебречь управляющими и возмущающими воздействиями в канале крена на канал бокового движения и производить косвенное измерение возмущающих воздействий блоком 10, как алгебраической суммы приведенных выше соответствующих инерционных и управляющих воздействий по следующим упрощенным алгоритмам, основанным на линеаризованных уравнениях объекта:
и информация с выхода СПК 37 о величине отклонения руля курса (управляющем сигнале по курсу). После снятия сигнала с выхода КРП 4 движение самолета начинает совершаться по заданному направлению на ВПП. При этом можно пренебречь управляющими и возмущающими воздействиями в канале крена на канал бокового движения и производить косвенное измерение возмущающих воздействий блоком 10, как алгебраической суммы приведенных выше соответствующих инерционных и управляющих воздействий по следующим упрощенным алгоритмам, основанным на линеаризованных уравнениях объекта:
efz=  +q
+q +r
+r (9)
(9)
eLϕ=  +q
+q +r
+r +ρ31δк, где efz,eLϕ косвенно измеренные возмущающие сила и момент бокового движения
+ρ31δк, где efz,eLϕ косвенно измеренные возмущающие сила и момент бокового движения
δк- угол отклонения руля курса.
q21,r21,q31,r31, ρ31 аэродинамические параметры самолета.
Эти параметры являются функциями конкретных аэродинамических условий, в которых происходит полет самолета.
Для повышения точности определения возмущающих боковое движение возмущений, а также для повышения точности реализации законов управления (приближения реального процесса управления к требуемому) в предлагаемой системе производится адаптированное к текущим аэродинамическим условиям определение параметров q21, r21, q31,r31, ρ31. Указанное определение параметров производится блоками ЗКБ 11 и БАБ 12. ЗКБ 11 предназначен для программного задания, как функции скорости и высоты полета, следующих коэффициентов передачи канала управления боковым движением:
по линейному боковому отклонению n1;
по линейной скорости бокового движения n2;
по угловому отклонению курса k1;
по угловой скорости курса k2.
Функциональная зависимость выходных параметров ЗКБ 11 от входных величин (скорости и высоты полета) может быть реализована, в частности, в виде ступенчатых функций, изменения которых осуществляется скачкообразно при соответствующих изменениях входных параметров. При этом на первом выходе ЗКБ 11 вырабатываются значения коэффициентов n1 и n2, а на втором выходе ЗКБ 11 значения коэффициентов k1 и k2. Сигналы, пропорциональные этим коэффициентам, поступают на входы блока БАБ 12. Алгоритмы работы БАБ 12 будут описаны ниже после описания работы БУП 14 и БУК 27. На первом выходе БАБ 12 вырабатываются значения параметров r21,q21, а также значения коэффициентов n1,n2, поступающие с выхода ЗКБ 11. На втором БАБ 12 вырабатываются значения параметров r31q31, а также значения коэффициентов k1,k2. Выходные сигналы БПБ 12 поступают на входы БВБ 10. В БВБ 10 сигналы текущих аэродинамических параметров r21, q21,r31,q31 используются при косвенном измерении возмущений, действующих на боковое движение самолета. Одновременно сигнал со второго выхода БАБ 12 поступает на вход БУК 27, а сигнал с первого выхода БАБ 12 поступает на вход БУП 14, где они используются для формирования законов управления боковым движением. В предлагаемой системе в штатном режиме работы используется оригинальный закон управления, основанный на моделировании самолета как объекта управления. При этом приняты следующие положения:
1. Вместо переменной величины ϕ (угловое отклонение от курса) в закон управления введена функция Δeϕ При этом закон управления строится таким образом, чтобы отклонение Δeϕ=eϕ-ϕ было мало. Указанная замена переменных обусловлена тем обстоятельством, что невозможно одновременно минимизировать две обобщенные координаты ϕ (угол рыскания) и Z (линейное отклонение на боку) при одном органе управления руле, однако, возможно минимизировать две обобщенные координаты Δeϕ и Z.
2. В закон управления введено управление по косвенно измеренным возмущающему моменту и возмущающей силе.
3. В закон управления по отклонению (по переменным Δeϕ и Z введен в качестве дополнительного множителя (на все составляющие закона управления) высокий коэффициент усиления.
Предлагаемый закон управления строится по двузвенной схеме. Первое звено реализуется блоком БУП 14 и моделирует дифференциальное уравнение движения объекта управления по боку, которое имеет вид, приведенный в первом уравнении системы (4). С учетом этого уравнение, которое реализуется блоком 14 и которое представляет собой закон управления линейным боковым перемещением имеет следующий вид:
r = (1-ε)efZ-(
= (1-ε)efZ-( +q
+q )+K(
)+K( +n
+n +n1Z) (10) где величины efz и eϕ моделируют величины fz и ϕ соответственно;
+n1Z) (10) где величины efz и eϕ моделируют величины fz и ϕ соответственно;
ε и К соответственно численно предельно малый безразмерный параметр и численно предельно большой коэффициент усиления, предельные значения которых выбираются из условий обеспечения устойчивости процесса управления по результатам моделирования с реальной аппаратурой (Практически ε имеет порядок 0,001, а К имеет порядок 100 в результате оптимизации по двум параметрам).
Реализация закона управления (10) блоком 14 осуществляется следующим образом:
На входы блока 14 с выхода БВБ 10 поступает информация о значении косвенно измеренной возмущающей силы efz, а с выхода БАБ 12 информация о значениях адаптированных к текущим аэродинамическим условиям параметров r21 и q21 и о значениях коэффициентов n1 и n2. На основании поступившей и выработанной автономно информации в блоке 14 реализуется уравнение (10). По результатам решения этого уравнения на выходе блока 14 вырабатываются значение параметров eϕ и  (параметр eϕвырабатывается путем интегрирования параметра
(параметр eϕвырабатывается путем интегрирования параметра  ). Выходной сигнал блока 14 поступает на вход первого сумматора 13, на другой вход которого с выхода БОР 9 поступает сигнал курсового отклонения ϕ Первый сумматор 13 вырабатывает разность между углом ϕ и воспроизводящей этот угол функцией eϕ которая равна:
). Выходной сигнал блока 14 поступает на вход первого сумматора 13, на другой вход которого с выхода БОР 9 поступает сигнал курсового отклонения ϕ Первый сумматор 13 вырабатывает разность между углом ϕ и воспроизводящей этот угол функцией eϕ которая равна:
eϕ f + Δeϕ.
Выходной сигнал сумматора 13 поступает на вход БУК 27, на другие входы которого поступают следующие сигналы:
с выхода БУП 14 сигналы eϕ
c выхода БАБ 12 сигналы значения адаптированных к текущим аэродинамическим условиям параметров ρ31, q31, r31 и сигналы значений коэффициентов K1, K2;
с выхода БВБ 10 сигнал косвенно измеренного возмущающего момента eLϕ.
В БУК 26 формируется второе звено закона управления, которое моделирует дифференциальное уравнение движения объекта управления по курсу (рысканье), имеющее вид, приведенный во втором уравнении (9). С учетом этого уравнения уравнение, которое реализуется блоком 27, представляет собой закон управления по курсу (рысканью) и имеет следующий вид:
ρ31δ (1-ε)eLϕ+( +q
+q +r
+r )+K(
)+K( +K
+K +K1Δeϕ), (11) где δ угол отклонения руля курса под действием управляющего сигнала.
+K1Δeϕ), (11) где δ угол отклонения руля курса под действием управляющего сигнала.
Управляющий сигнал по курсу, выработанный БУК 27, поступает на первый вход второго сумматора 33, на второй вход которого с выхода ФАПБ 26 поступает адаптированный программный сигнал бокового движения. Адаптированный программный сигнал формируется на базе результатов косвенного измерения возмущений БВБ 10 таким образом, чтобы обеспечить нулевое линейное боковое перемещение самолета под действием этих возмущений за счет изменения курсового угла самолета. При этом в качестве численных значений возмущений рассматриваются усредненные значения этих возмущений на предшествующем интервале времени. Программное адаптированное значение отклонения руля δпр находится из уравнения (9), если положить линейное боковое отклонение и его производные равным нулю, и имеет вид:
δпр=  +
+  efZср+
efZср+  efZср (12) где eLϕср,efzср средние значения возмущений на предшествующем интервале времени, определяются следующими выражениями:
efZср (12) где eLϕср,efzср средние значения возмущений на предшествующем интервале времени, определяются следующими выражениями:
eLϕср= 
 eLϕ(τ)dτ; efZср=
eLϕ(τ)dτ; efZср= 
 efZ(τ)dτ (12l) где Т априорно заданный интервал усреднения.
efZ(τ)dτ (12l) где Т априорно заданный интервал усреднения.
Реализация выражений (12) и (12l) осуществляется ФАПБ 26, при этом в качестве значений коэффициентов r21*, r31*, ρ31* для реализации указанных выражений используются программные значения коэффициентов r21,r31, ρ31, записанные в ФАПБ 26 на основании априорной информации. Введение программного адаптированного сигнала позволяет существенно повысить устойчивость самолета при значительных изменениях внешних возмущений. Выходной сигнал сумматора 33, состоящий из адаптированной и неадаптированной частей, поступает на вход сервопривода 38 курса для непосредственного управления приводом 41 курса. Выходной сигнал сервопривода, пропорциональный величине фактического отклонения руля, поступает на вход БВБ 10 для решения задачи косвенного измерения возмущений.
В нештатном режиме работы на третьем выходе БОР 9 вырабатывается команда, поступающая на входы ФАПБ 26 и БУК 27. При этом выходной сигнал ФАПБ 26 становится равным нулю, а БУК 27 формирует закон стабилизации по курсу, аналогичный закону, используемому в системе-прототипе, в соответствии со следующим уравнением
δ m1ϕ+m +m
+m где δ отклонение руля курса под действием сигнала стабилизации в нештатном режиме.
где δ отклонение руля курса под действием сигнала стабилизации в нештатном режиме.
m1, m2, m3 априорнозаписанные в БУК 27 коэффициенты передачи по углу, угловой скорости и угловому ускорению курса.
Сигнал δ поступает через сумматор 33 на вход сервопривода 38 курса для управления рулевым приводом 41 в нештатном режиме.
В результате выполнения авторами математических исследований показано, что изменение координат Z и ϕ под действием внешней возмущающей силы и момента удовлетворяют уравнениям:
[1+μ1(t)] +[n2+μ2(t)]
+[n2+μ2(t)] +n1Z-
+n1Z-  r21(t)
r21(t) = μ6(t)fZ(t)
= μ6(t)fZ(t) +K
+K +K1Δeϕ+μ3(t)
+K1Δeϕ+μ3(t) +μ4(t)
+μ4(t) +μ5(t)
+μ5(t) μ7(t)Lϕ(t) (13) где малые по модулю и медленно изменяющиеся функции времени μj(t) (j= 1,2 7)
μ7(t)Lϕ(t) (13) где малые по модулю и медленно изменяющиеся функции времени μj(t) (j= 1,2 7)
μ1(t) 
 1
1 ,
,
μ2(t) 
 q
q ,
,
μ3(t) 
 1
1 ,
,
μ4(t) 
 r31- r
r31- r ,
,
μ5(t) 
 q31-q
q31-q ,
,
μ6(t) 
 ,
,
μ7(t) 
 . где индекс (*) соответствует программным значениям коэффициентов, а отсутствие этого индекса соответствует фактическим значениям этих коэффициентов. Анализ уравнений (13) показывает, что введение предлагаемого закона управления (11) позволяет уменьшить на два порядка воздействие возмущающей силы и возмущающего момента на координаты Δeϕи Z (правые части уравнений (13) умножаются на величины второго порядка малости μ6(t) и μ7 (t). В то же время наличие в левой части уравнений (13) параметров μi (i 1,2,5) показывает, что при несовпадении программных значений параметров r21, q21, r31*, q31*, ρ31* с их фактическими значениями динамика переходных процессов по координатам Z и Δeϕ будет отличаться от расчетной. Для обеспечения совпадения программных и фактических значений аэродинамических коэффициентов в предлагаемую систему, как отмечалось выше, введен блок 12 адаптации бокового движения, на входы которого с выхода ЗКБ 11 поступают значения коэффициентов n1, n2, K1, K2, с выхода первого сумматора 12 значение параметров Δeϕ а с выходов БОР 9 значения координат Z и ϕ и их производных. Авторами разработаны алгоритмы адаптации аэродинамических параметров к внешним условиям, которые реализуются блоком 12. Эти алгоритмы ориентированы на то, что процесс адаптации начинается на участке снижения, когда можно пренебречь влияниям крена на боковое движение самолета, и, следовательно, фактические значения параметров r21, q21, r31, q31, ρ31 можно вычислять исходя из следующих упрощенных формул
. где индекс (*) соответствует программным значениям коэффициентов, а отсутствие этого индекса соответствует фактическим значениям этих коэффициентов. Анализ уравнений (13) показывает, что введение предлагаемого закона управления (11) позволяет уменьшить на два порядка воздействие возмущающей силы и возмущающего момента на координаты Δeϕи Z (правые части уравнений (13) умножаются на величины второго порядка малости μ6(t) и μ7 (t). В то же время наличие в левой части уравнений (13) параметров μi (i 1,2,5) показывает, что при несовпадении программных значений параметров r21, q21, r31*, q31*, ρ31* с их фактическими значениями динамика переходных процессов по координатам Z и Δeϕ будет отличаться от расчетной. Для обеспечения совпадения программных и фактических значений аэродинамических коэффициентов в предлагаемую систему, как отмечалось выше, введен блок 12 адаптации бокового движения, на входы которого с выхода ЗКБ 11 поступают значения коэффициентов n1, n2, K1, K2, с выхода первого сумматора 12 значение параметров Δeϕ а с выходов БОР 9 значения координат Z и ϕ и их производных. Авторами разработаны алгоритмы адаптации аэродинамических параметров к внешним условиям, которые реализуются блоком 12. Эти алгоритмы ориентированы на то, что процесс адаптации начинается на участке снижения, когда можно пренебречь влияниям крена на боковое движение самолета, и, следовательно, фактические значения параметров r21, q21, r31, q31, ρ31 можно вычислять исходя из следующих упрощенных формул
ν1=  ν2=
ν2=  ν3=
ν3=  ν4=
ν4=  ν5=
ν5= 
μ1=  (ν1-1), μ2=
(ν1-1), μ2=  q
q 1
1 , μ3=
, μ3=  (ν5-1), (14)
(ν5-1), (14)
μ4=  r
r 1
1 , μ5=
, μ5=  q
q 1
1
Полагая на интервале оценивали 0 ≅t ≅T
μj(t) μjo const (j 1,2,5) оценки неизвестных параметров  определяются следующими уравнениями:
определяются следующими уравнениями:
 ϕ
ϕ
 ϕ12(τ)ϕ11(τ)dτ
ϕ12(τ)ϕ11(τ)dτ  ϕ1(τ)ϕ11(τ)dτ
ϕ1(τ)ϕ11(τ)dτ
 ϕ11(τ)ϕ12(τ)dτ+
ϕ11(τ)ϕ12(τ)dτ+
 ϕ
ϕ ϕ1(τ)ϕ12(τ)dt (15)
ϕ1(τ)ϕ12(τ)dt (15)
 ϕ
ϕ
 ϕ22(τ)ϕ21(τ)dτ+
ϕ22(τ)ϕ21(τ)dτ+
 ϕ23(τ)ϕ21(τ)dτ
ϕ23(τ)ϕ21(τ)dτ ϕ2(τ)ϕ21(τ)dτ
ϕ2(τ)ϕ21(τ)dτ
 ϕ21(τ)ϕ22(τ)dτ+
ϕ21(τ)ϕ22(τ)dτ+
 ϕ
ϕ
 ϕ23(τ)ϕ22(τ)dτ
ϕ23(τ)ϕ22(τ)dτ ϕ2(τ)ϕ22(τ)dτ
ϕ2(τ)ϕ22(τ)dτ
 ϕ21(τ)ϕ23(τ)dτ+
ϕ21(τ)ϕ23(τ)dτ+
 ϕ22(τ)ϕ23(τ)dτ+
ϕ22(τ)ϕ23(τ)dτ+
 (τ)dτ
(τ)dτ ϕ2(τ)ϕ23(τ)dτ где ϕ11(t)
ϕ2(τ)ϕ23(τ)dτ где ϕ11(t)  -efZ, ϕ12(t)
-efZ, ϕ12(t)  , ϕ1(t) (
, ϕ1(t) ( +n
+n +n1Z)-
+n1Z)-  efZ+
efZ+ 

ϕ21(t) ( -eLϕ), ϕ22(t)
-eLϕ), ϕ22(t)  , ϕ23(t)
, ϕ23(t)  , ϕ2(t)
, ϕ2(t)
-( +K
+K +K1Δeϕ)+
+K1Δeϕ)+  eϕ
eϕ
В результате вычисления алгоритмов (15) блоком 12 производится определение оценок  а затем определение по алгоритмам (14) оценок адаптированных к внешним условиям аэродинамических параметров r21,q21,r31,q31, ρ31, которые используются для повышения точности управления боковым движением самолета при его автоматической посадке.
а затем определение по алгоритмам (14) оценок адаптированных к внешним условиям аэродинамических параметров r21,q21,r31,q31, ρ31, которые используются для повышения точности управления боковым движением самолета при его автоматической посадке.
Вторым каналом самолетом является канал крена. В предлагаемой системе он заключает в себя блоки БВ Кр 15, ЗККр 16, БАКр 17, ФАПКр 28, БУКр 29, третий сумматор 34, СПКр 39 и РПКр 42. Дополнительные функции в канале крена по отношению к аналогичным блокам бокового движения имеет только БУКр 29, который решает задачу выработки управляющего сигнала по крену при выходе самолета на направление, задаваемое курсовым радиомаяком. При наличии отклонения от этого направления на выходе КПР 4 вырабатывается сигнал рассогласования между заданным направлением полета и линией визирования курсового радиомаяка курсовым радиоприемником 4.
Этот сигнал рассогласования через БОР 9 поступает на вход БУКр 29. В БУКр 29 вырабатывается составляющая δКрY1 управляющего сигнала δКрY, являющаяся функцией от сигнала рассогласования КРП 4, в следующем виде:
δ КрY1 n χn χи
χи < χзад
< χзад
δ КpY1 δo χи
χи ≥ χзад где χ и сигнал рассогласования на выходе КПР 4 (курсовой угол курсового радиомаяка),
≥ χзад где χ и сигнал рассогласования на выходе КПР 4 (курсовой угол курсового радиомаяка),
χ зад заданное допустимое значение сигнала рассогласования;
δ o максимальное допустимое значение угла поворота руля, крена под действием сигнала рассогласования КПР 4;
n коэффициент пропорциональности.
Сигнал χ и с выхода КПР 4 через БОР 9 поступает на вход БУКр 29 в штатном режиме (отсутствие команды на третьем выходе БОР 9) только до момента, когда этот сигнал станет равным нулю, после чего управление и стабилизация самолета осуществляется по предлагаемым в изобретении алгоритмам (с момента поступления аэродромной информации). В нештатном режиме сигнал χи поступает на вход БУКр 29, аналогично системе-прототипу, практически на протяжении всего участка снижения.
До момента поступления аэродpомной информации в штатном режиме работы, а также в нештатном режиме работы (при наличии команды, вырабатываемой на третьем выходе БОР 9) до момента перехода на ручной режим управления в БУКр 29 вырабатывается вторая составляющая управляющего сигнала (сигнал стабилизации) δ КрY2 в соответствии со следующим алгоритмом:
δKpY2= r1γ+r +r
+r где r1,r2,r3 коэффициенты передачи канала крена.
где r1,r2,r3 коэффициенты передачи канала крена.
Сигнал δ КрY1 суммируется с сигналом δКрY2 и суммарный сигнал δКрY поступает на выход БУКр 29 до момента перехода на штатный режим работы после получения аэродромной информации. С выхода БУКр 29 через третий сумматор 34 сигнал δКрY поступает на вход сервопривода 39. При этом по команде, вырабатываемой в нештатном режиме работы на третьем выходе БРП 9, выходной сигнал ФАПКр 28 становится равным нулю, а, следовательно, равен нулю сигнал на втором входе сумматора 34.
Вторая составляющая управляющего сигнала по крену (сигнал стабилизации в штатном режиме δ КрY3 вырабатывается в БУКр 29 для обеспечения невозмущаемого движения по крену после поступления аэродромной информации и имеет вид:
δKpY3= KKp( +K
+K +K2Kpγ)+
+K2Kpγ)+  (1-εKp)eLγ где К1Кр,К2Кр значения коэффициентов канала крена, вырабатываемые ЗККр 16, как функции высоты и скорости полета (аналогично ЗКБ11) и поступающие через БАКр17 в БУКр 29.
(1-εKp)eLγ где К1Кр,К2Кр значения коэффициентов канала крена, вырабатываемые ЗККр 16, как функции высоты и скорости полета (аналогично ЗКБ11) и поступающие через БАКр17 в БУКр 29.
К1Кр и εКр соответственно большой коэффициент усиления и малое безразмерное число, выбираемые из условия обеспечения требуемых динамических характеристик по крену по аналогии с каналом управления боковым движением.
eLγ выходной сигнал БВКр 14 имеет вид:
eLγ=  +q
+q +ρ31KpεKp где q31Кр, ρ31Кр аэродинамические коэффициенты канала крена, аналогичные коэффициенты q31, ρ31 канала бокового движения.
+ρ31KpεKp где q31Кр, ρ31Кр аэродинамические коэффициенты канала крена, аналогичные коэффициенты q31, ρ31 канала бокового движения.
Управляющий сигнал δКрY3 замещает в штатном режиме на выходе БУКр 29 сигнал δКрY. Выходной сигнал БУКр поступает на вход третьего сумматора 34, где он суммируется с сигналом δ Кр* адаптивной прогpаммы по крену с выхода ФАПКр 28. Суммарный сигнал δКр δКр* + δКрY3 с выхода сумматора 34 поступает на вход сервопривода 39 для управления и стабилизации самолета по крену. Назначение и алгоритмы работы остальных блоков канала крена, а также нештатный режим работы канала крена идентичны назначению и алгоритмам работы (в том числе и в нештатном режиме) аналогичных блоков канала бокового движения, если принять в алгоритмах последних линейное перемещение и производные от него равными нулю, т.к. в начале крена имеет место только угловое движение.
Третьим каналом управления движением (высотой и тангажом) самолета является канал продольного движения, включающий блоки ГРП5, четвертый сумматор 18, пятый сумматор 19, ПБП 20, БВП 21, БУВ 22, БАП 23, шестой сумматор 24, ЗКП 30, БУТ 31, ФАПП 35, седьмой сумматор 36, СПТ 40, РПТ 43.
Принципиальным отличием в предлагаемой системе канала управления продольным движением от канала управления боковым движением является наличие в нем программного блока 20, вырабатывающего на первом выходе программу снижения по высоте, а на втором выходе программу снижения по тангажу.
Выработка указанных программ производится в виде функциональной зависимости от текущей дальности D самолета от ВПП, сигнал которой с пятого выхода БОР 9 поступает на вход БВП 20.
В частном случае программа снижения по высоте hпр вырабатывается в соответствии со следующим алгоритмом:
hпр ρ D3 D ≥ D3
hp ρ D3e-ρ1t ho D < D3 где D заданное значение дальности
hо величина принижения
ρ и ρ1 масштабный коэффициент и постоянная экспоненты соответственно
В частном случае программа снижения по тангажу вырабатывается в виде ступенчатой функции от текущей дальности до ВПП.
В нештатном режиме (по команде с третьего выхода БОР 9) ПБП 20 не вырабатывает программу снижения по тангажу и высоте, т.к. снижение осуществляется по направлению, задаваемому глиссадным радиомаяком. Выработанные ПБП 20 программные сигналы снижения по тангажу и его производным и высоте и ее производным поступают на вторые входы сумматоров 18 и 20 соответственно, на первые входы которых поступают с шестого выхода БОР 9 и пятого выхода БК 7 соответственно сигналы текущих значений высоты и ее производных (выработанные в БОК 8) и тангажа и его производных. В нештатном режиме работы с шестого выхода БОР 9 поступает сигнал высоты и ее производных, выработанный РВ 3. Выработанные на выходах сумматора 18 и 20 разностные сигналы по этим параметрам используются в БВП 21 для решения задачи косвенного измерения возмущений силы и возмущающего момента в канале продольного движения. Назначение остальных боков канала продольного движения совпадает с назначением соответствующих блоков канала бокового движения. Алгоритмы канала управления продольным движением аналогичным приведенным выше алгоритмам канала управления боковым движением, если в алгоритмах последних боковую линейную координату и ее производные Z,  ,
,  и угловую координату по курсу и ее производные ϕ,
и угловую координату по курсу и ее производные ϕ,  ,
,  заменить на отклонение от программы вертикальной координаты и ее производных h,
заменить на отклонение от программы вертикальной координаты и ее производных h,  ,
,  и на отклонение от программы угловой координаты по тангажу и ее производных соответственно, а также заменить аэродинамические параметры и коэффициенты канала бокового движения самолета на соответствующие аэродинамические параметры и коэффициенты канала продольного движения.
и на отклонение от программы угловой координаты по тангажу и ее производных соответственно, а также заменить аэродинамические параметры и коэффициенты канала бокового движения самолета на соответствующие аэродинамические параметры и коэффициенты канала продольного движения.
В нештатном режиме работы в БУТ 31 по команде с третьего выхода БОР 9 вырабатывается закон управления рулем тангажа до момента перехода на ручное управление в частности в соответствии со следующим алгоритмом:
δти= n1ν+n4hиH+n +n
+n где ηи сигнал угла места глиссадного радиомаяка, вырабатываемый глиссадным радиоприемником 5 и поступающий через БОР 9 в нештатном режиме на восьмой вход БУТ 31.
где ηи сигнал угла места глиссадного радиомаяка, вырабатываемый глиссадным радиоприемником 5 и поступающий через БОР 9 в нештатном режиме на восьмой вход БУТ 31.
n1,n2,n3,n4 коэффициенты передачи канала тангажа.
Н сигнал высоты полета, вырабатываемый РВ 3 и поступающий в нештатном режиме через БОР 9 и через четвертый сумматор 18 на седьмой вход БУТ 31
Выработанный БУТ 31 сигнал δти через седьмой сумматор 36 поступает на вход СПТ 40 для управления рулем тангажа в нештатном режиме. При этом сигнал, выработанный ФАПП 35, по команде с третьего выхода БОР 9 становится равным нулю.
Четвертым каналом, входящим в предлагаемую систему, является канал управления тягой самолета, включающий блоки 3С25, ВАТ32, и СПАТ 37.
Основное отличие предлагаемого канала (в штатном режиме работы) от аналогичного канала системы-прототипа заключается в дополнительном алгоритме работы вычислителя 32 автомата тяги.
При формировании этого алгоритма учтена возможность использования высокоточного сигнала вертикальной скорости, вырабатываемого БК 7, для управления тягой двигателя на участке снижения, что имеет большое значение, например, при попадании самолета в воздушную яму или восходящий воздушный поток. ВАТ 32 вырабатывает дополнительный управляющий сигнал Uд при отклонении величины управляющего сигнала по вертикальной скорости  от диапазона допускаемых значений в соответствии со следующим алгоритмом:
от диапазона допускаемых значений в соответствии со следующим алгоритмом:
Uд= 0 при 



Uд= mg( -hдоп.max) при
-hдоп.max) при  >
> 
U -mg( -
- ) при
) при  <
<  где
где  допускаемое максимальное значение вертикальной скорости.
допускаемое максимальное значение вертикальной скорости.
 допускаемое минимальное значение вертикальной скорости.
допускаемое минимальное значение вертикальной скорости.
mg коэффициент пропорциональности
Выражение для основного управляющего сигнала Uо, вырабатываемого ВАТ 32 имеет следующий вид:
Uo mo(V-V3с), где V значение абсолютной скорости, вырабатываемое БК 7
V3с программное значение скорости, вырабатываемое 3С 25
mo коэффициент пропорциональности
Сигнал Uо через управляемый переключатель, входящий в состав ВАТ 32, поступает на выход ВАТ 32. При отклонении величины вертикальной скорости от допускаемых пределов ( ≥
≥  или
или  ≅
≅  ) в ВАТ 32 срабатывает пороговое устройство, подающее команду на управляемый переключатель. При этом переключатель снимает с выхода сигнал Uо и подключает к выходу сигнал Uд.
) в ВАТ 32 срабатывает пороговое устройство, подающее команду на управляемый переключатель. При этом переключатель снимает с выхода сигнал Uо и подключает к выходу сигнал Uд.
В нештатном режиме работы по команде, вырабатываемой на третьем выходе БОР 9, ВАТ 32 реализует управление тягой двигателя только по сигналу Uо аналогично системе-прототипу.
Таким образом, предлагаемая система автоматической посадки обеспечивает решение поставленной задачи повышения точности выработки навигационных параметров самолета и улучшения его динамических характеристик, что, в свою очередь, позволяет снизить требования к уровню видимости и величине внешних возмущений, действующих на самолет при его посадке на аэродром.
Предлагаемое новое техническое решение системы автоматической посадки успешно прошло этап математического моделирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1993 |
|
RU2077029C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 1993 |
|
RU2062990C1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ САМОЛЕТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2017 |
|
RU2662576C1 |
| Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса | 2017 |
|
RU2676844C1 |
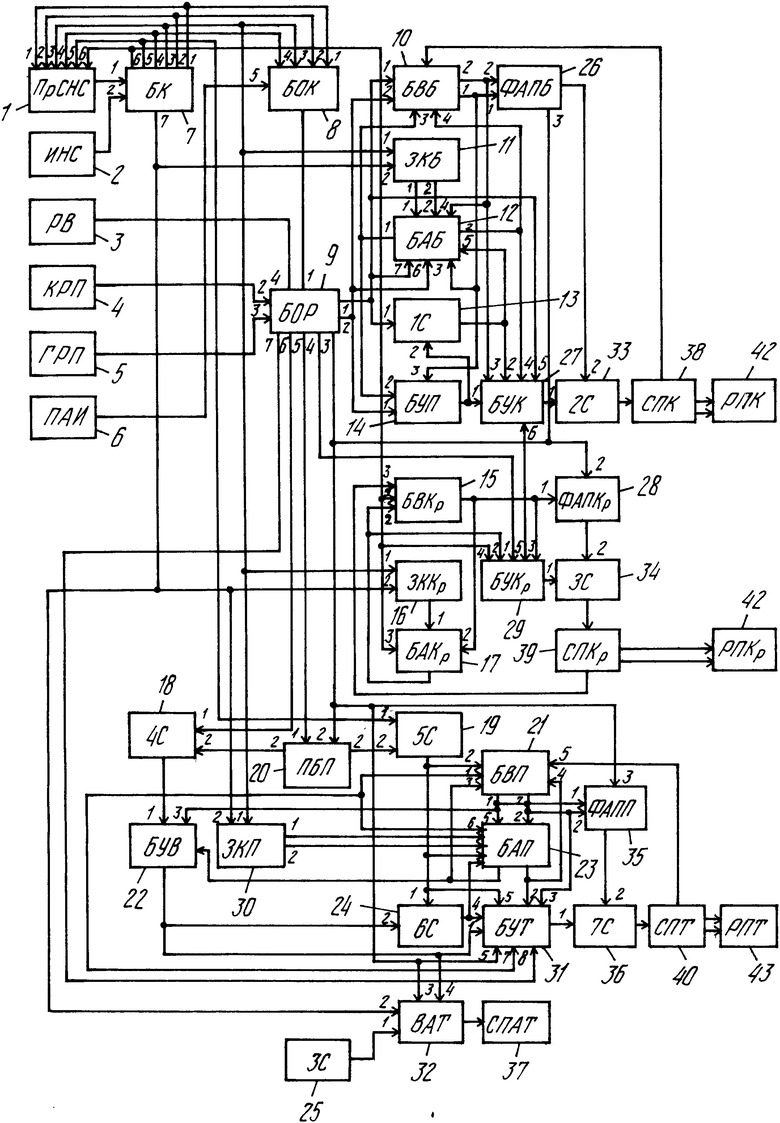
Изобретение относится к системам управления летательными аппаратами и, в частности, к системам управления посадкой самолетов. Сущность изобретения состоит в том, что система автоматической посадки самолета, содержащая радиовысотомер, курсовой радиоприемник, глиссадный радиоприемник, сервоприводы каналов курса, крена и тангажа, механически связанные с соответствующими рулевыми приводами, а также последовательно соединенные задатчик скорости и вычислитель автомата тяги, выход которого соединен с сервоприводом автомата тяги, согласно изобретению включает инерциальную навигационную систему, приемник спутниковой навигационной системы, блок комплексирования, приемник аэродромной информации, блок определения режима посадки, блок выработки относительных координат, программный блок продольного движения, блоки косвенного измерения возмущений бокового движения крена и продольного движения, задатчик коэффициентов бокового движения, крена и продольного движения, блоки адаптации бокового движения, крена и продольного движения, формирователи адаптивной программы бокового движения, крена и продольного движения, первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры, последовательно соединенные блок управления боковым перемещением и блок управления курсом, блок управления креном, последовательно соединенные блок управления высотой и блок управления тангажом. 1 ил.
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА, содержащая радиовысотомер, курсовой радиоприемник, глиссадный радиоприемник, сервоприводы каналов курса, крена и тангажа, механически связанные с соответствующими рулевыми приводами, а также последовательно соединенные задатчик скорости и вычислитель автомата тяги, выход которого соединен с сервоприводом автомата тяги, отличающаяся тем, что в нее введены инерциальная навигационная система, приемник спутниковой навигационной системы, блок комплексирования, приемник аэродромной информации, блок определения режима посадки, блок выработки относительных координат, блоки косвенного измерения возмущений бокового движения, крена и продольного движения, блоки адаптации бокового движения, крена и продольного движения, формирователи адаптивной программы бокового движения, крена и продольного движения, первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры, последовательно соединнные блок управления боковым перемещением и блок управления курсом, блок управления креном, программный блок продольного движения, последовательно соединенные блок управления высотой и блок управления тангажом, при этом первый и второй выходы блока комплексирования соединены соответственно с выходами приемника спутниковой навигационной системы и инерциальной навигационной системы, первый, второй, третий, четвертый, пятый и шестой входы приемника спутниковой навигационной системы соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым выходами блока комплексирования, первый, второй, третий и четвертый выходы которого соединены также соответственно с первым, вторым, третьим и четвертым входами блока выработки относительных координат, пятый вход которого соединен с выходом приемника аэродромной информации, выход блока выработки относительных координат соединен с первым входом блока определения режима посадки, второй и третий входы которого соединены соответственно с выходами курсового и глиссадного радиоприемников, а четвертый вход которого соединен с выходом радиовысотомера, третий выход блока комплексирования соединен с первыми входами задатчиков коэффициентов бокового движения, крена и продольного движения, пятый выход блока комплексирования соединен с первым входом пятого сумматора, его шестой выход с первым входом блока косвенного измерения возмущения крена, третьим входом блока адаптации крена и четвертым входом блока управления креном, его седьмой выход с вторыми входами задатчиков коэффициентов бокового движения, крена и продольного движения и с вторым входом вычислителя автомата тяги, первый выход блока определения режима посадки соединен с пятым входом блока управления курсом, седьмым входом блока адаптации бокового движения и первыми входами первого сумматора и блока косвенного измерения возмущений бокового движения, второй вход которого соединен с первым входом блока управления боковым перемещением, вторым выходом блока определения режима посадки и шестым входом блока адаптации бокового движения, третий выход блока определения режима посадки соединен с вторыми входами программного блока продольного движения и формирователя адаптивной программы по крену, с третьими входами формирователей адаптивной программы бокового движения и продольного движения, четвертым входом вычислителя автомата тяги, шестым входом блока управления курсом и пятыми входами блока управления креном и блока управления тангажом, четвертый выход блока определения режима посадки соединен с первым входом блока управления креном, пятый выход блока определения режима посадки соединен с первым входом программного блока продольного движения, шестой выход блока определения режима посадки соединен с первым входом четвертого сумматора, седьмой выход блока определения режима посадки соединен с восьмым входом блока управления тангажом, первый выход блока косвенного измерения взмущений бокового движения соединен с первым входом формирователя адаптивной программы бокового движения, с третьими входами блока адаптации бокового движения и блока управления боковым перемещением, а второй его выход соединен с вторым входом формирователя адаптивной программы бокового движения, четвертым входом блока адаптации бокового движения и третьим входом блока управления курсом, третий и четвертый входы блока косвенного измерения возмущений бокового движения соединены соответственно с первым и вторым выходами блока адаптации бокового движения, а пятый его вход соединен с выходом сервопривода курса, первый и второй выходы задатчика коэффициентов бокового движения соединены соответственно с первым и вторым входами блока адаптации бокового движения, первый и второй выходы которого соединены соответственно с вторым входом блока управления боковым перемещением и четвертым входом блока управления курсом, выход блока управления боковым перемещением соединен с вторым входом первого сумматора, второй вход блока управления курсом соединен с выходом первого сумматора и пятым входом блока адаптации бокового движения, а его выход соединен с первым входом второго сумматора, второй вход которого соединен с выходом формирователя адаптивной программы бокового движения, а его выход соединен с входом сервопривода курса, выход задатчика коэффициентов крена соединен с первым входом адаптации крена, выход которого соединен с вторыми входами блока управления креном и блока косвенного измерения возмущения крена, третий вход которого соединен с выходом сервопривода крена, а выход соединен с первым входом формирователя адаптивной программы крена, с вторым входом блока адаптации крена и третьим входом блока управления креном, выход которого соединен с первым входом третьего сумматора, второй вход которого соединен с выходом формирователя адаптивной программы крена, а выход которого соединен с входом сервопривода крена, первый и второй выходы программного блока продольного движения соединены соответственно с вторыми входами четвертого и пятого сумматоров, выход четвертого сумматора соединен с первыми входами блока косвенного измерения возмущений продольного движения и блока управления высотой, шестым входом блока адаптации продольного движения, третьим входом вычислителя автомата тяги и седьмым входом управления тангажом, выход пятого сумматора соединен с шестым входом блока управления тангажом, первым входом шестого сумматора, вторым входом блока косвенного измерения возмущений продольного движения и седьмым входом блока адаптации продольного движения, выход сервопривода тангажа соединен с пытым входом блока косвенного измерения возмущений продольного движения, третий и четвертый входы которого соединены соответственно с вторыми входами блока управления высотой и блока управления тангажом, а также соединены соответственно с первым и вторым выходами блока адаптации продольного движения, а его первый и второй выходы соединены соответственно с первым и вторым входами формирователя адаптивной программы продольного движения, а также с первым и вторым входами блока адаптации продольного движения, а также соединены соответственно с третьими входами блока управления высотой и блока управления тангажом, третий вход блока адаптации продольного движения соединен с выходом шестого сумматора и четвертым входом блока управления тангажом, выход которого соединен с первым входом седьмого сумматора, второй вход которого соединен с выходом формирователя адаптивной программы продольного движения, выход седьмого сумматора соединен с входом сервопривода тангажа, второй вход шестого сумматора соединен с выходом блока управления высотой, а первый и второй выходы задатчика коэффициентов продольного движения соединены соответственно с четвертым и пятым входами блока адаптации продольного движения.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Состояние и направление развития систем обеспечения автоматической посадки самолетов | |||
| М.: НИИ гражданской авиации, 1972, с.56, рис.18. | |||
