Изобретение относится к авиации, а именно к системам полуавтоматического управления.
Как свидетельствует статистика летных происшествий, примерно половина катастроф и аварий пассажирских самолетов происходит на посадке. Одним из направлений решения этой проблемы является автоматизация указанного этапа полета и всесторонний контроль действий пилота бортовыми системами индикации и сигнализации. К основным контролируемым параметрам можно отнести угол тангажа самолета - угол между осью самолета и поверхностью земли.
Угол тангажа изменяется путем отклонения руля высоты (РВ). Посадка сухопутного самолета с большим углом тангажа чревата касанием взлетно-посадочной полосы (ВПП) хвостом самолета. Для гидросамолета не только в процессе приводнения, но и при движении по воде (глиссировании) необходимо чтобы угол тангажа не превышал некоторого значения, образующего т.н. «верхнюю» границу гидродинамической устойчивости, выход за которую влечет за собой потерю продольной устойчивости гидросамолета. Таким образом, имеется эксплуатационное ограничение угла тангажа «сверху».
Посадка с малым или отрицательным углом тангажа, во-первых, может привести к касанию ВПП передней опорой шасси, что весьма нежелательно. Во-вторых, малый или отрицательный угол тангажа подразумевает отрицательную вертикальную скорость самолета (скорость снижения). При большом отрицательном значении вертикальной скорости в момент касания ВПП посадка происходит «грубо» и может привести к катастрофе. Аналогично «верхней» границе гидродинамической устойчивости для гидросамолетов характерно наличие т.н. «нижней» границы, когда значение угла тангажа мало и может привести к потере боковой устойчивости. Таким образом, не менее важным, с точки зрения обеспечения безопасности посадки самолета, является эксплуатационное ограничение величины угла тангажа «снизу».
Известна система предупреждения сваливания самолета, предназначенная для предотвращения выхода на опасный режим (1). Принцип работы этой системы состоит в том, что если значение контролируемого параметра (угол атаки) становится близким к ограничению, уменьшается передаточное число между РВ и ручкой управления (РУ). Однако, несмотря на то, что уменьшение степени реагирования самолета на управляющее воздействие должно просигнализировать летчику о приближении опасного режима, вероятность выхода на этот режим сохраняется, т.к. это уменьшение не изменяет нежелательной тенденции в динамике движения самолета. Подобная система является аналогом предполагаемого изобретения по назначению (ограничение кинематических параметров движения самолета).
Известна также система автоматического управления (САУ) углом тангажа и ограничения угла атаки летательного аппарата (2), в состав которой помимо задатчика угла тангажа, датчика угла тангажа, вычислителя автопилота угла тангажа и сервопривода руля высоты дополнительно входит алгебраический селектор максимального сигнала и вычислитель автомата ограничения угла атаки. Суть этой системы сводится к тому, что алгебраический селектор коммутирует свои входы и выход таким образом, что при выдаче автопилотом тангажа сигнала на кабрирование меньшего, чем получен от автомата ограничения угла атаки, управление рулем высоты передается последнему (автомату), а автопилот тангажа исключается из контура управления. Подобная система является аналогом предполагаемого изобретения по способу реализации механизма ограничения кинематических параметров движения самолета - с помощью селектора сигналов. Однако, современные САУ даже на самолетах, оснащенных сложными бортовыми комплексами, как правило, не обеспечивают выполнение автоматической посадки. Поэтому заключительный этап посадки должен выполняться при участии летчика, следовательно, система продольного управления должна быть полуавтоматической.
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, является система автоматического увода самолета с максимально допустимого угла атаки (3), содержащая модуль формирования управляющих сигналов, электрически связанный с блоком формирования индикации, который связан с модулем поиска и выдачи рекомендаций, пилотажно-информационным индикатором и индикатором информационно-управляющего поля. Кроме этого, она содержит речевой информатор, органы ручного и ножного управления по каналам тангажа, крена и курса, исполнительные механизмы по этим каналам управления, отличающаяся тем, что в нее введен блок анализа аэродинамических параметров полета (БААПП), электрически связанный с датчиком углов атаки, модулем формирования управляющих сигналов, блоком регистрации параметров полета, автопилотом, автоматом тяги, органами ручного и ножного управления и их исполнительными механизмами. В этой системе БААПП в случае превышения допустимого угла атаки на 1 градус отключает рычаг управления от канала тангажа и переводит руль высоты самолета на пологое пикирование, а при достижении самолетом отрицательного угла наклона траектории, заложенного в программе, управление передается автопилоту, включенному в режим стабилизации достигнутого угла наклона траектории. По достижении самолетом наивыгоднейшего угла атаки БААПП переключает автопилот в режим стабилизации высоты, крена и курса, а так же включает рычаг управления в канал тангажа, т.е. возвращает пилота в контур управления.
Таким образом, описанная система не только ограничивает управляющие действия пилота, ведущие к достижению критического угла атаки, но и устраняет нежелательные тенденции в динамике движения самолета путем активного вмешательства в управление.
Однако способ реализации механизма ограничения кинематических параметров в виде блока, формирующего последовательности управляющих воздействий «на пологое пикирование», «стабилизация заданного отрицательного угла наклона траектории» и затем передающего управление пилоту, не приемлем при реализации ограничений по максимальному и минимальному углу тангажа.
Технический результат предполагаемого изобретения выражается в повышении уровня безопасности полета самолета за счет создания полуавтоматической системы предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона, которая не только бы ограничивала управляющие действия летчика, неадекватные текущей обстановке и ведущие к возникновению аварийной ситуации, но и устраняла нежелательные тенденции в динамике движения самолета по тангажу путем активного вмешательства в управление.
Технический результат достигается тем, что в систему управления самолета, содержащую автопилот, привод руля высоты, соединенные последовательно ручку управления и электродистанционную систему управления, соединенные с датчиками параметров движения самолета, дополнительно включены селектор сигналов, переключатель, блок сравнения, задатчик значения высоты включения селектора сигналов. При этом первый вход селектора сигналов соединен с выходом электродистанционной системы управления. Второй и третий входы соответственно соединены с выходами подсистем стабилизации максимального и минимального углов тангажа автопилота, а выход селектора сигналов соединен через переключатель с приводом руля высоты. Причем другой вход переключателя соединен с электродистанционной системой управления, а третий, управляющий вход переключателя, соединен с выходом блока сравнения, первый вход которого соединен с выходом задатчика значения высоты включения селектора сигналов, а второй вход соединен с выходом датчиков параметров движения самолета.
Главным отличием предлагаемой системы от прототипа является то, что в нее включен селектор сигналов, который формирует сигнал для привода РВ таким образом, что при выходе угла тангажа самолета из эксплуатационного диапазона управление передается системе автоматического управления углом тангажа.
Предлагаемое изобретение обладает новизной, изобретательским уровнем и промышленной применимостью.
Сущность предполагаемого изобретения поясняется чертежами, где:
- на фиг.1 изображена структурная схема предлагаемой полуавтоматической системы предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона;
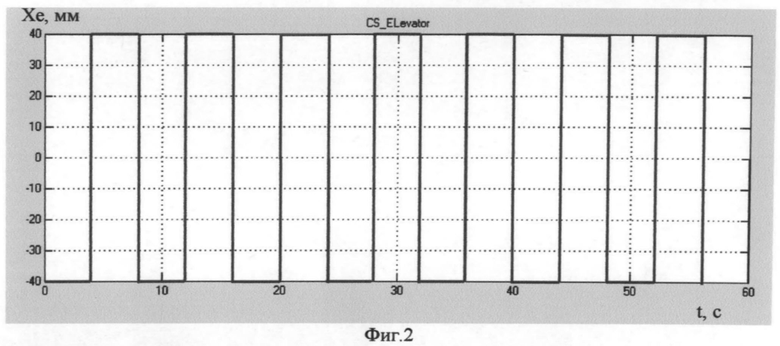
- на фиг.2 - результаты математического моделирования: ход ручки управления;
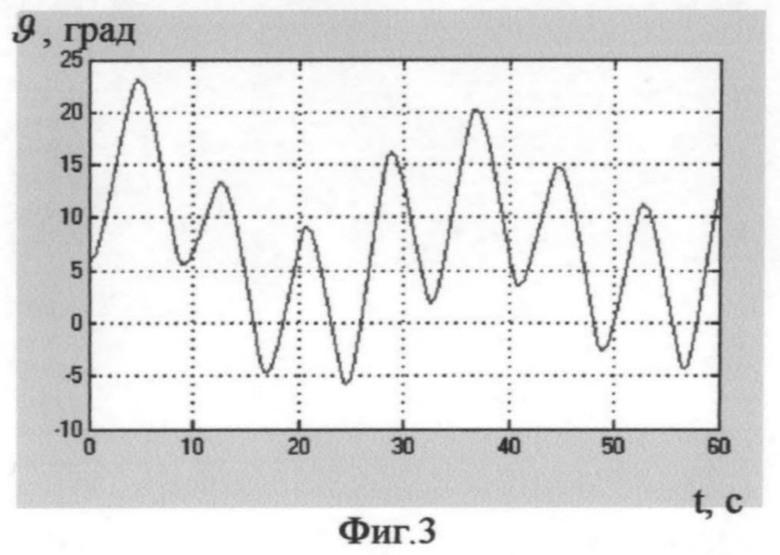
- на фиг.3 - результаты математического моделирования: угол тангажа (без селектора сигналов);
- на фиг.4 - результаты математического моделирования: угол тангажа (с селектором сигналов);
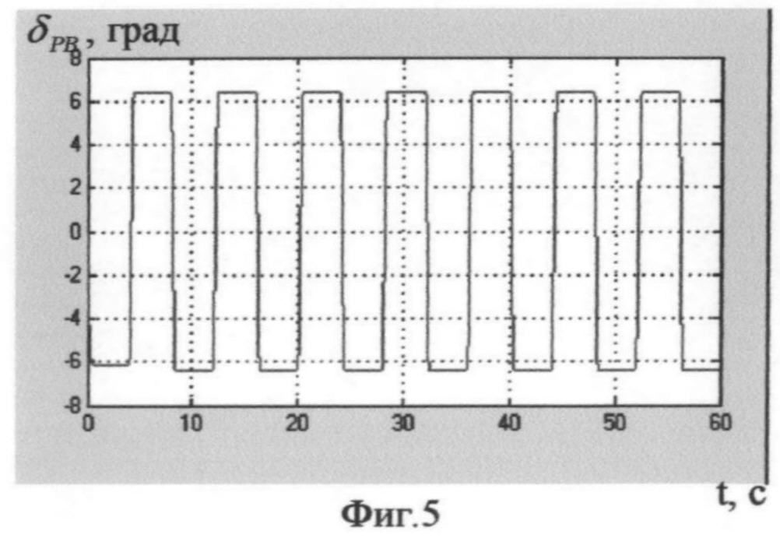
- на фиг.5 - результаты математического моделирования: угол отклонения РВ (без селектора сигналов);
- на фиг.6 - результаты математического моделирования: угол отклонения РВ (с селектором сигналов);
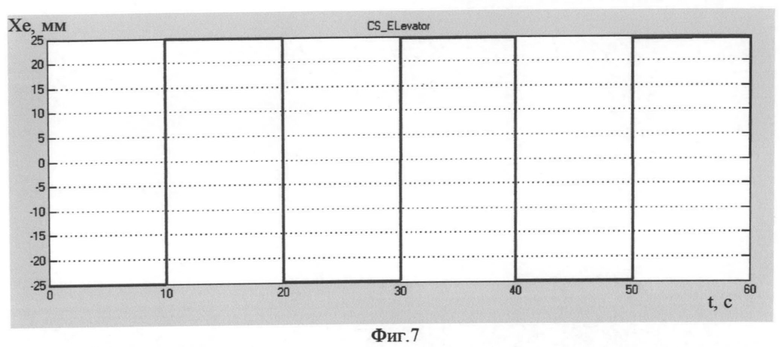
- на фиг.7 - результаты математического моделирования: ход ручки управления;
- на фиг.8 - результаты математического моделирования: угол тангажа (без селектора сигналов);
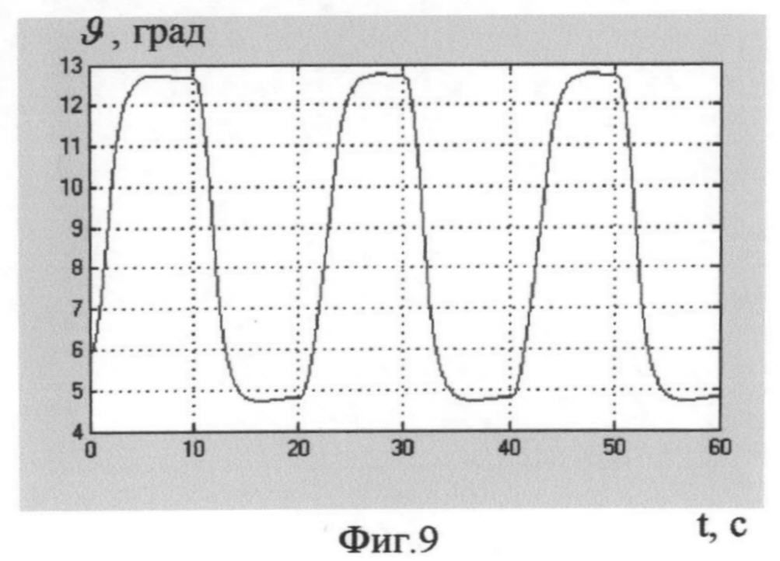
- на фиг.9 - результаты математического моделирования: угол тангажа (с селектором сигналов);
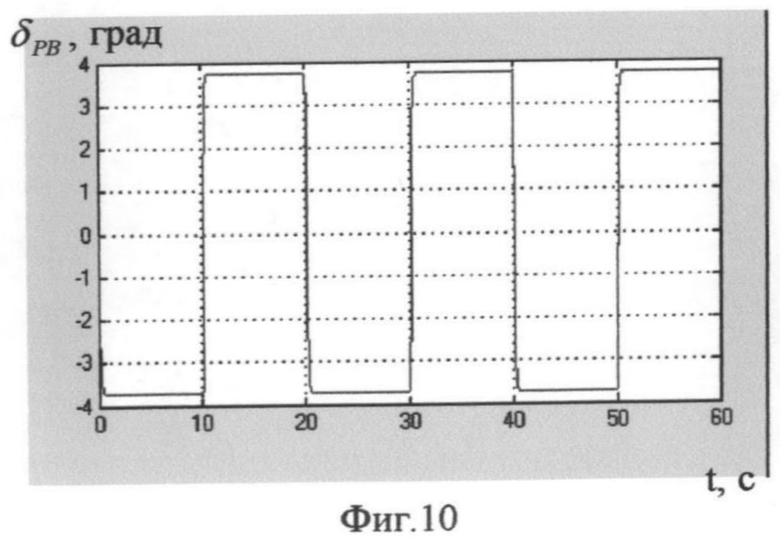
- на фиг.10 - результаты математического моделирования: угол отклонения РВ (без селектора сигналов);
- на фиг.11 - результаты математического моделирования: угол отклонения РВ (с селектором сигналов).
Полуавтоматическая система предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона (фиг.1) сформирована на основе автопилота стабилизации заданного угла тангажа и включает в себя автопилот 1, привод руля высоты 2, соединенные последовательно ручку управления 3 и ЭДСУ 4, на вход которой, как и на вход автопилота 1, поступают сигналы с датчиков параметров движения самолета 5. Кроме этого, в нее включен селектор сигналов 6, первым входом которого является сигнал с ЭДСУ 4, со вторым и третьим входом соответственно соединены выходы подсистем стабилизации максимального 7 и минимального 8 углов тангажа автопилота 1, а выход селектора сигналов 6 соединен через переключатель 9 с приводом руля высоты 2, причем другой вход переключателя 9 соединен с ЭДСУ 4, а третий, управляющий вход переключателя 9, соединен с выходом блока сравнения 10, осуществляющего сравнение высоты включения селектора сигналов 6, поступающей с соответствующего задатчика 11 на первый вход блока сравнения 10, и текущей высоты полета, поступающей на второй вход блока сравнения 10 с датчиков параметров движения самолета 5.
Суть предлагаемого изобретения заключается в том, что значение сигнала, управляющего приводом РВ 2, и поступающего с РУ 3 через ЭДСУ 4, сравнивается в селекторе 6 с сигналами, которые формируют в автопилоте 1 подсистемы 7 и 8 стабилизации угла тангажа. В случае, если сигнал с ЭДСУ 4 становится больше значения, которое формирует подсистема 7 для стабилизации максимально допустимого угла тангажа, управление передается этой подсистеме автопилота 1. Аналогичное, по сути, действие происходит, если сигнал с ЭДСУ 4 становится меньше значения, которое формирует подсистема 8 для стабилизации минимально допустимого угла тангажа. В этом случае выход селектора 6 коммутируется с подсистемой 8 автопилота 1.
Таким образом, селектор сигналов 6 не позволяет летчику ни при каких условиях вывести самолет ошибочными действиями на опасный режим функционирования. Включение в полуавтоматическую систему предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона переключателя 9, управляемого сигналом с блока сравнения 10, обеспечивает передачу управления автопилоту 1 только тогда, когда высота полета самолета становится меньше некоторого порогового значения, определяемого задатчиком 11. В отличии от системы (2), в которой из контура управления селектором исключается автопилот заданного угла тангажа, в предлагаемом изобретении из управления исключается пилот.
Полученные математическим моделированием примеры (фиг.2-11), иллюстрирующие работу полуавтоматической системы предотвращения выхода угла тангажа за пределы эксплуатационного диапазона, подтверждают эффективность предлагаемой системы. Математическое моделирование динамики полета проводилось на модели одного из существующих самолетов. В проведенных численных экспериментах проверялась реакция самолета на серию дач ручки управления «от себя - к себе» (см. фиг.2 и фиг.7) при включенном и отключенном селекторе сигналов. Графики на фиг.2-6 и фиг.7-11 отличаются друг от друга амплитудой и частотой управляющего воздействия в виде дач РУ. Как видно из сравнения графиков изменения угла тангажа (фиг.3-4 и фиг.8-9) при включенном селекторе сигналов угол тангажа незначительно превосходит заданный максимальный угол в 12°, а также оказывается чуть меньше заданного минимального угла в 5°.
Предполагается, что внедрение полуавтоматической системы предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона значительно повысит уровень безопасности посадки самолета и нивелирует влияние «человеческого фактора» на этот этап полета.
Источники информации
1. Рудис В.И. Полуавтоматическое управление самолетом. - М.: Машиностроение, 1987, стр.122.
2. Патент на изобретение «Система автоматического управления углом тангажа и ограничения угла атаки летательного аппарата» №2434785 от 02.03.2010, МПК В64С 13/18.
3. Патент на полезную модель «Система автоматического увода самолета с максимально допустимого угла атаки» №79193 от 05.09.2008, МПК G05D 1/00.




Изобретение относится к авиации, а именно к системам управления посадкой. Полуавтоматическая система предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона содержит автопилот, привод руля высоты, соединенные последовательно ручку управления и электродистанционную систему управления, а также датчики параметров движения самолета. Главным отличием является то, что в данную систему включены селектор сигналов, переключатель, блок сравнения, задатчик значения высоты включения селектора сигналов. Причем селектор сигналов формирует сигнал для привода руля высоты таким образом, что при выходе угла тангажа самолета за пределы эксплуатационного диапазона управление передается системе автоматического управления углом тангажа, то есть ограничиваются управляющие воздействия летчика, неадекватные текущей обстановке и ведущие к возникновению аварийной ситуации. Система устраняет нежелательные тенденции в динамике движения самолета по тангажу путем активного вмешательства в управление. Повышается уровень безопасности полета самолета. 11 ил.
Полуавтоматическая система предотвращения выхода угла тангажа самолета за пределы эксплуатационного диапазона, содержащая автопилот, привод руля высоты, соединенные последовательно ручку управления и электродистанционную систему управления, вход которой, как и вход автопилота, соединен с датчиками параметров движения самолета, отличающаяся тем, что в нее дополнительно включены селектор сигналов, переключатель, блок сравнения и задатчик значения высоты включения селектора сигналов, при этом первый вход селектора сигналов соединен с выходом электродистанционной системы управления, второй и третий входы соответственно соединены с выходами подсистем стабилизации максимального и минимального углов тангажа автопилота, а выход селектора сигналов соединен через переключатель с приводом руля высоты, причем другой вход переключателя соединен с электродистанционной системой управления, а третий, управляющий вход переключателя, соединен с выходом блока сравнения, первый вход которого соединен с выходом задатчика значения высоты включения селектора сигналов, а второй вход соединен с выходом датчиков параметров движения самолета.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434785C1 |
| ШТАМП ДЛЯ ХОЛОДНОЙ ШТАМПОВКИ (ВЫДАВЛИВАНИЯ) СЛОЖНЫХ РЕЛЬЕФОВ В МЕТАЛЛЕ | 1948 |
|
SU79193A1 |
| Система управления углом наклона траектории самолета в продольной плоскости в режиме взлета | 1990 |
|
SU1779638A1 |
| US 5036469 A, 30.07.1991. | |||

