Изобретение относится к области машиностроения и может быть использовано в производстве микросистем.
Известно устройство для прецизионного перемещения изделий, которое содержит стол, направляющую, привод, выполненный в виде шести пьезоэлектрических преобразователей, жестко прикрепленных одними концами к столу. Пьезоэлектрические преобразователи связаны со столом и попарно с направляющей по структуре 1-координат [Авторское свидетельство СССР N 1713065, кл. H 02 N 2/00, H 01 L 41/09, 1989].
Недостатками данного устройства являются сложное выполнение вращательных движений, а также наклонное расположение приводов относительно стола, что приводит к возникновению в теле преобразователей напряженного состояния, искажающего форму колебаний преобразователей, и в свою очередь влияет на скоростные характеристики устройства. Кроме того, недостатком является узкая специализация устройства: транспортировка изделий.
Известно также устройство прецизионного позиционирования изделий, содержащее основание, столик, пьезокерамические преобразователи подключенные к генератору высокочастотных колебаний [Авторское свидетельство СССР N 864386, кл. H 01 L 41/08, H 02 N 11/00, 1981].
Недостатками данного устройства являются невысокие скоростные характеристики, а также отсутствие узла микроманипулирования.
Наиболее близким по технической сущности к заявляемому изобретению является мобильный микроробот, содержащий подвижную платформу, привод, выполненный в виде трех пьезоэлектрических преобразователей, систему микроманипулирования. Приводы подвижной платформы расположены в вершинах треугольника и жестко прикреплены к платформе, каждый пьезоэлектрический преобразователь выполнен в виде двух пьезокристаллов, работающих независимо. Система микроманипулирования имеет две степени свободы, стационарное состояние манипулятора обеспечивается с помощью магнита, расположенного в основании. Привод системы микроманипулирования выполнен в виде четырех пьезоэлектрических преобразователей. [J.- M. Breguet and Ph. Renaud A 4-degrees-of-freedom microrobot with manometer resolution. Robotica (1996), Vol.l4.-Cambridge University Press, 1996, pp. 199-203].
Недостатками данного устройства являются невысокая скорость передвижения микроробота, обусловленная использованием плоских пьезоэлементов с малым диапазоном деформаций, вызываемых приложенным напряжением, а также отсутствие вращения инструмента.
Задачами, на решение которых направлено заявляемое изобретение, являются повышение производительности микроробота, а также расширение функциональных возможностей узла микроманипулирования.
Решение поставленных задач достигается тем, что в мобильном пьезоэлектрическом микророботе, содержащем подвижную платформу и систему микроманипулирования с приводами, выполненными в виде пьезоэлектрических преобразователей, в отличие от прототипа пьезоэлектрические преобразователи выполнены в виде пьезокерамических трубчатых элементов, при этом три пьезоэлектрических преобразователя подвижной платформы выполнены с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами, а три пьезоэлектрических преобразователя системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами и образуют декартову систему координат, а шаровая основа системы микроманипулирования с узлом для крепления микроинструмента обладает тремя степенями свободы.
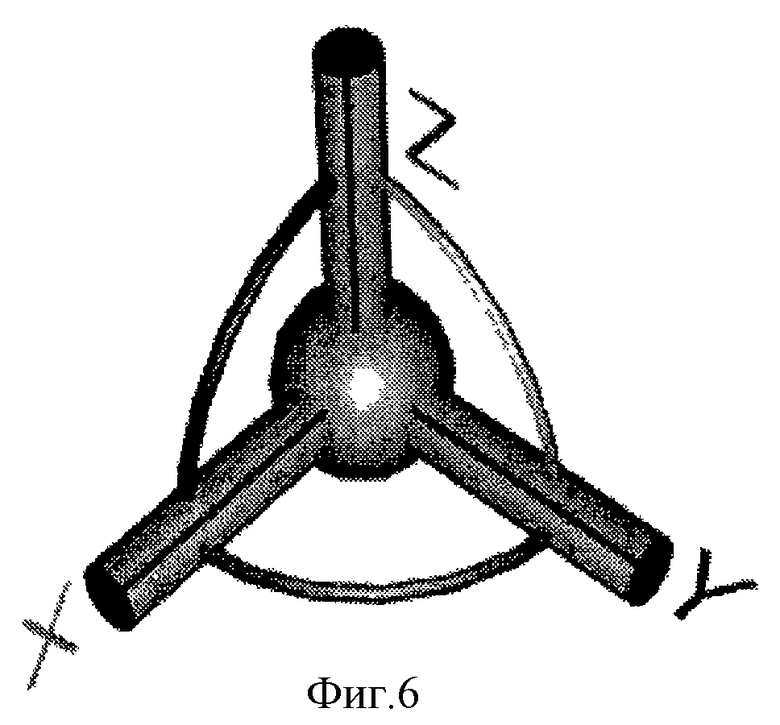
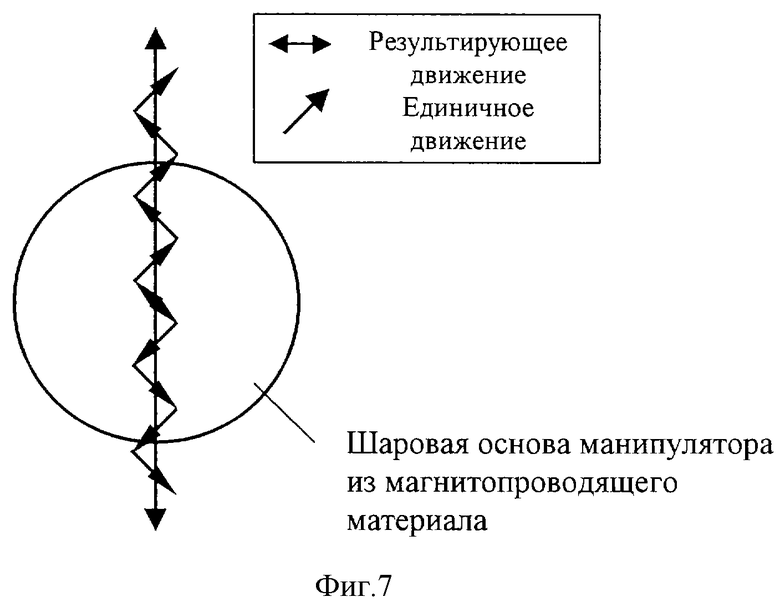
На фиг.1а показан мобильный пьезоэлектрический микроробот, вид снизу; на фиг. 1б - то же, вид сбоку с пьезоэлектрическими преобразователями; на фиг. 2а - пьезоэлектрический преобразователь подвижной платформы микроробота; фиг. 2б - то же, вид сбоку; на фиг.3 - четырехсегментный пьезокерамический трубчатый элемент; на фиг. 4 - двухсегментный пьезокерамический трубчатый элемент; на фиг. 3 приведено движение пьезопреобразователя при выполнении одного шага; на фиг.6 - расположение пьезоэлектрических преобразователей в системе микроманипулирования; на фиг.7 - результирующее движение при подъеме и опускании манипулятора.
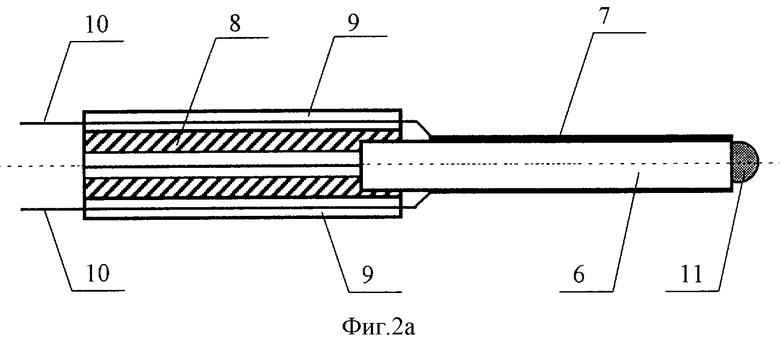
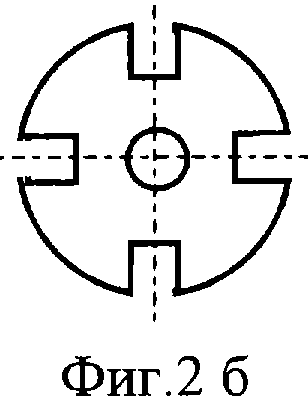
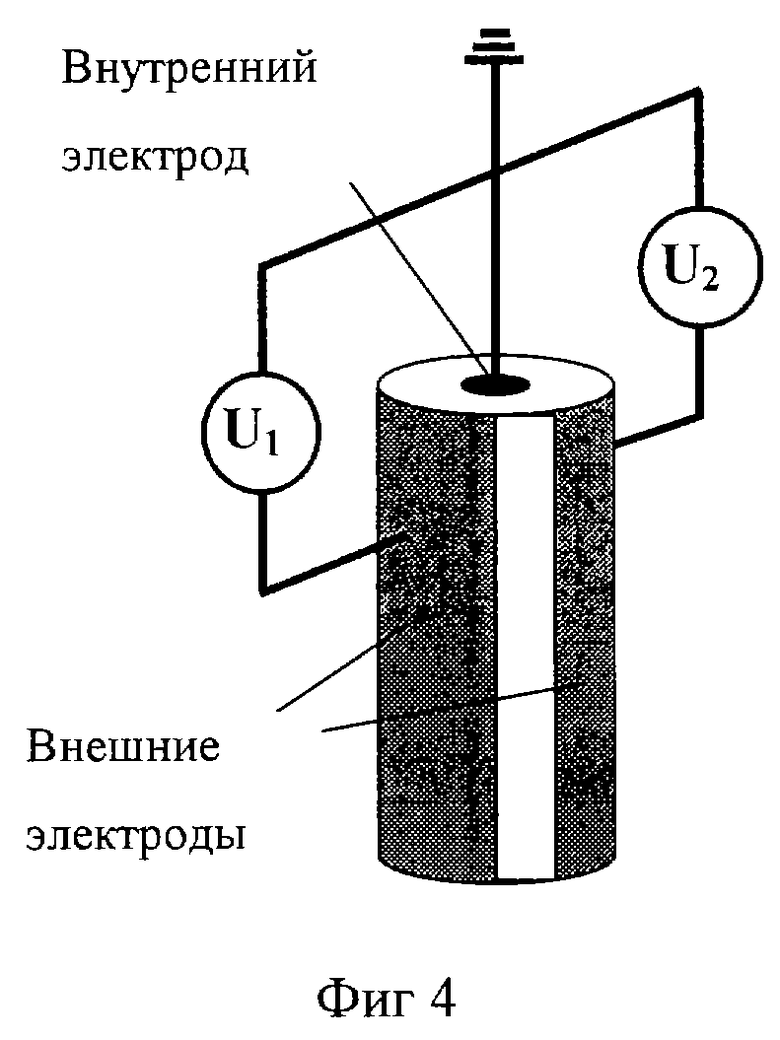
Мобильный пьезоэлектрический микроробот (фиг. 1а, 1б) содержит подвижную платформу 1, пьезоэлектрические преобразователи 2, расположенные в вершинах равностороннего треугольника. Система микроманипулирования содержит шаровую основу 3, постоянный магнит 4, пьезоэлектрические преобразователи 5, образующие декартову систему координат. Привод платформы (фиг.2а, 2б) представляет собой пьезокерамический трубчатый элемент 6, с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами 7. Один конец пьезокерамического трубчатого элемента 6 присоединен к втулке 8, с проточенными пазами 9, в которые уложены провода 10. К другому свободному концу пьезокерамического трубчатого элемента приклеен рубиновый шарик 11. Пьезоэлектрические преобразователи системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами (фиг. 4) и образуют декартову систему координат.
Мобильный пьезоэлектрический микроробот работает следующим образом.
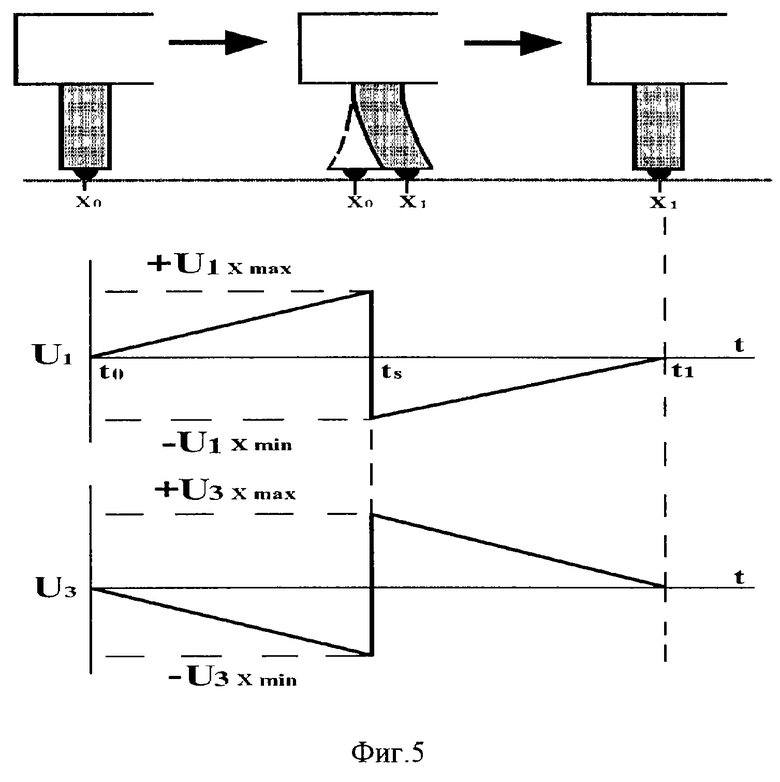
Под действием электрического напряжения, приложенного между внутренним и одним из внешних электродов (фиг.3), пьезокерамический трубчатый элемент деформируется (уменьшается или увеличивается в длине). При подаче на сегменты внешних электродов соответствующих напряжений Ui, где i=1,...,4, пьезоэлектрический преобразователь 2 можно удлинить, укоротить или согнуть в любом из направлений, что позволяет реализовывать движение и повороты подвижной платформы 1 микроробота. Для перемещения микроробота используется шагоподобное движение, основанное на скоростных свойствах пьезоэлементов, которые обеспечивают возможность прыжка и направленного движения пьезоэлектрического преобразователя при выполнении одного шага, прежде чем под действием силы тяжести платформа потеряет свое устойчивое состояние.
Для выполнения одного шага используется определенная последовательность генерации управляющих напряжений. Рассмотрим случай движения в направлении от первого сегмента к третьему сегменту (фиг.3). В течение первой фазы движения в период времени [to, ts] под действием линейно изменяющихся напряжений U1 и U3 происходит медленный наклон пьезокерамического трубчатого элемента из нейтрального состояния в направлении первого сегмента. При этом подвижная платформа микроробота под действием силы тяжести совершает поступательное движение в направлении третьего сегмента. В момент времени ts на второй фазе движения происходит одновременное скачкообразное изменение полярности прикладываемых напряжений, в результате чего пьезоэлектрический преобразователь совершает прыжок из начального положения x0 в положение x1 (фиг. 5). На третьей фазе в период времени [ts, t1] под действием линейно изменяющихся напряжений U1 и U3 происходит медленное выпрямление пьезокерамического трубчатого элемента до нейтрального состояния.
Величина шага меняется путем изменения амплитуды подаваемого на сегменты напряжения. Скорость передвижения задается через период следования пилообразного напряжения.
Система микроманипулирования представляет собой шаровую основу 3 из магнитопроводящего материала с приспособлением для крепления микроинструмента. На подвижной платформе 1 (фиг. 1б) установлена магнитная система, состоящая из постоянного магнита 4, компенсирующего силу тяжести и обеспечивающего постоянную силу притяжения шаровой основы 3 манипулятора к пьезоэлектрическим преобразователям 5. Движение манипулятора генерируется с помощью трех пьезоэлектрических преобразователей. Пьезоэлектрические преобразователи выполнены в виде двухсегментных пьезокерамических трубчатых элементов, с напыленными одним внутренним и двумя внешними симметрично расположенными электродами (фиг. 4), оси которых пересекаются в центре шаровой основы под углом 90o друг к другу, то есть образуют декартову систему координат с началом отсчета, расположенным в центре шаровой основы (фиг.6). Прикладывая напряжение на соответствующие противолежащие сегменты внешних электродов двух пьезопреобразователей, можно добиться поворота шаровой основы относительно оси третьего пьезопреобразователя.
В связи с тем, что величина одного шага пьезоэлектрического преобразователя меньше диаметра шаровой основы манипулятора на шесть порядков, то управление перемещением микроинструмента осуществляется аналогично управлению пьезоэлектрическими преобразователями подвижной платформы (фиг.5).
Для решения задач микроманипулирования используются три типа движения манипулятора. Во-первых, подъем и опускание манипулятора; во-вторых, движение манипулятора влево или вправо; и, в-третьих, вращение манипулятора вокруг собственной оси. Вращение манипулятора вокруг собственной оси может быть выполнено с помощью поворота шаровой основы вокруг одного из пьезопреобразователей. Первые два типа требуют более сложного составного движения, один из вариантов, реализации которого показан на фиг. 7. Здесь желаемое движение генерируется с помощью чередующихся последовательностей простейших движений - вращений вокруг одного из пьезопреобразователя.
Итак, заявляемое изобретение позволяет повысить производительность микроробота, что достигается использованием новой конструкции привода подвижной платформы, так, пьезоэлектрические преобразователи выполнены в виде пьезокерамических трубчатых элементов, при этом три пьезоэлектрических преобразователя подвижной платформы выполнены с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами, а расширение функциональных возможностей системы микроманипулирования достигается тем, что три пьезоэлектрических преобразователя системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами и образуют декартову систему координат, а шаровая основа системы микроманипулирования с узлом для крепления микроинструмента обладает тремя степенями свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР | 1999 |
|
RU2172239C2 |
| МОБИЛЬНЫЙ ВАКУУМНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 2002 |
|
RU2205475C1 |
| Шагающий инсектоморфный мобильный микроробот | 2018 |
|
RU2699209C1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 2002 |
|
RU2210493C1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| ТЕРМОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МИКРОМАНИПУЛЯТОРА (ВАРИАНТЫ) | 2004 |
|
RU2259914C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ МНОГОКОМПОНЕНТНЫХ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2109277C1 |
| СФЕРИЧЕСКИЙ ИНТЕРПОЛЯТОР | 1996 |
|
RU2124227C1 |
| ЦИЛИНДРИЧЕСКАЯ МАГНЕТРОННАЯ РАСПЫЛИТЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2174160C2 |

Изобретение относится к машиностроению и может быть использовано в производстве микросистем. Мобильный пьезоэлектрический микроробот содержит подвижную платформу, пьезоэлектрические преобразователи, расположенные в вершинах равностороннего треугольника. Система микроманипулирования содержит шаровую основу, постоянный магнит, пьезоэлектрические преобразователи, образующие декартову систему координат. Привод платформы представляет собой пьезокерамический трубчатый элемент с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами. Один конец пьезокерамического трубчатого элемента присоединен к втулке с проточенными пазами, в которые уложены провода. К другому свободному концу пьезокерамического трубчатого элемента приклеен рубиновый шарик. Пьезоэлектрические преобразователи системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами и образуют декартову систему координат. Технический результат: повышение производительности микроробота, а также расширение функциональных возможностей узла микроманипулирования. 7 ил.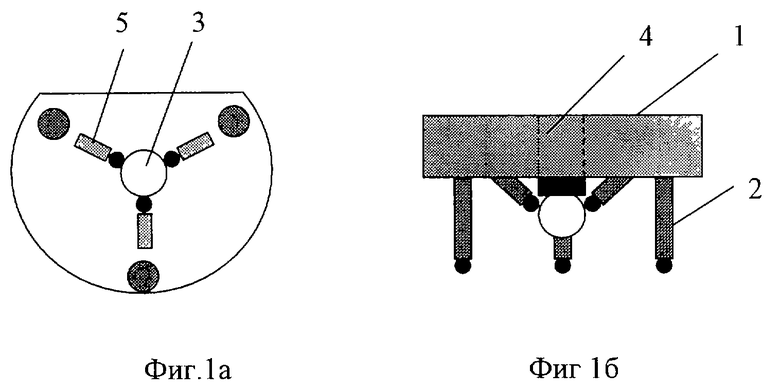
Мобильный пьезоэлектрический микроробот, содержащий подвижную платформу и систему микроманипулирования с приводами, выполненными в виде пьезоэлектрических преобразователей, отличающийся тем, что пьезоэлектрические преобразователи выполнены в виде пьезокерамических трубчатых элементов, при этом три пьезоэлектрических преобразователя подвижной платформы выполнены с напыленными одним внутренним и четырьмя внешними симметрично расположенными электродами, а три пьезоэлектрических преобразователя системы микроманипулирования выполнены с напыленными одним внутренним и двумя внешними симметрично расположенными электродами и образуют декартову систему координат, а шаровая основа системы микроманипулирования с узлом для крепления микроинструмента обладает тремя степенями свободы.
| J.M.Brequet al., A 4-degrees-of-freedan microrobot wit makometer resolution, Robotica, 1996 | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Устройство прецизионного позиционирования | 1979 |
|
SU864386A1 |
| Микроманипулятор | 1989 |
|
SU1823806A3 |
| US 5872417, 16.02.1999 | |||
| US 4727278, 23.02.1999. | |||

