Изобретение относится к измерительной технике, а именно к измерению уровня жидкостей и суспензий.
Наиболее близким по технической сущности к заявляемому является прецизионный уровнемер типа ВМ 43 фирмы L. Krohne [1]. Уровнемер содержит контактную пластину, подвешенную на тросике, сматываемом с барабана, следящий электропривод, передающий вращение барабану через электромагнитную муфту, датчик Холла, отслеживающий момент погружения контактной пластины в жидкость, систему управления следящим электроприводом и систему обработки измерительной информации.
Недостатком данного уровнемера является то, что он неприменим для измерения уровня взрывоопасных жидкостей и суспензий.
Кроме того, данный уровнемер имеет ограниченную точность измерения уровня вследствие того, что уровень отсчитывается косвенно по количеству оборотов барабана.
Цель изобретения - повышение точности измерения уровня взрывоопасных жидкостей и суспензий.
Поставленная цель достигается тем, что уровнемер прецизионный взрывобезопасный, содержащий зонд, подвес зонда, привод перемещения зонда и систему обработки измерительной информации, снабжен зондом, на котором размещены два пневматических датчика типа сопло-заслонка, срезы сопл которых разнесены по высоте на расстояние, равное или несколько большее тормозного пути привода, подвес зонда выполнен в виде ленты, имеющей три дорожки перфорации с шагами 1 м, 1 см и 1 мм, взаимодействующие со считывающим устройством, выходы считывающего устройства соединены со входами счетчиков, выходы которых через управляемые вентили соединены с входами вычитания сумматоров, а входы суммирования сумматоров соединены с выходами задатчика уровня, выходы сумматоров через дешифраторы соединены с блоком индикации.
Сравнение известных технических решений с заявленными показывает, что существенными отличительными свойствами предложенного технического решения является наличие нового узла и функциональных связей.
Новый узел - зонд, несущий два датчика типа сопло-заслонка, сумматор, блок задания уровня, управляемые вентили.
Новые функциональные связи - выходы пневматических датчиков соединены со входами блока управления приводом, соединения сумматоров и счетчиков.
Применение предлагаемого изобретения позволяет осуществлять измерение в резервуарах уровня взрыво- и пожароопасных жидкостей с высокой точностью (абсолютная ошибка измерения находится в пределах ±2,5 мм).
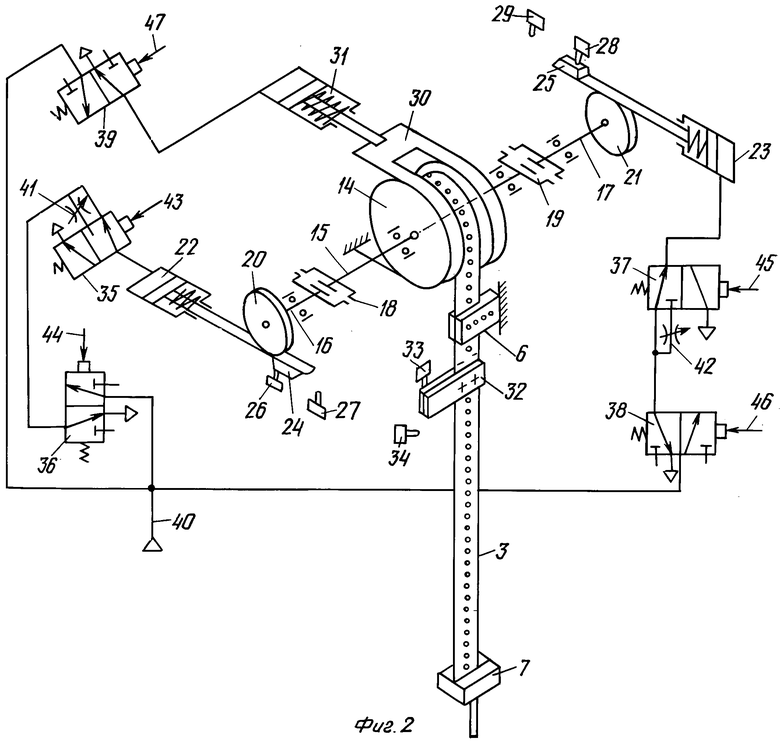
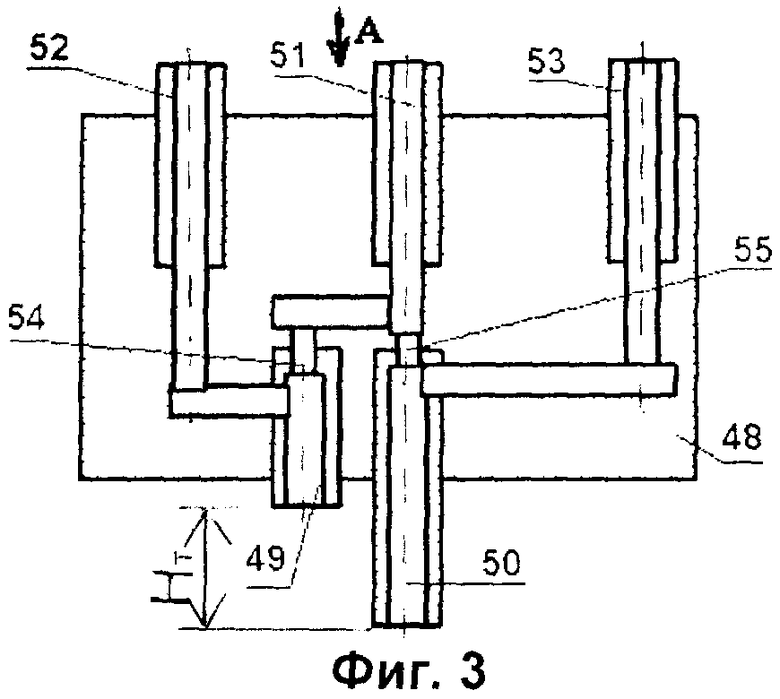
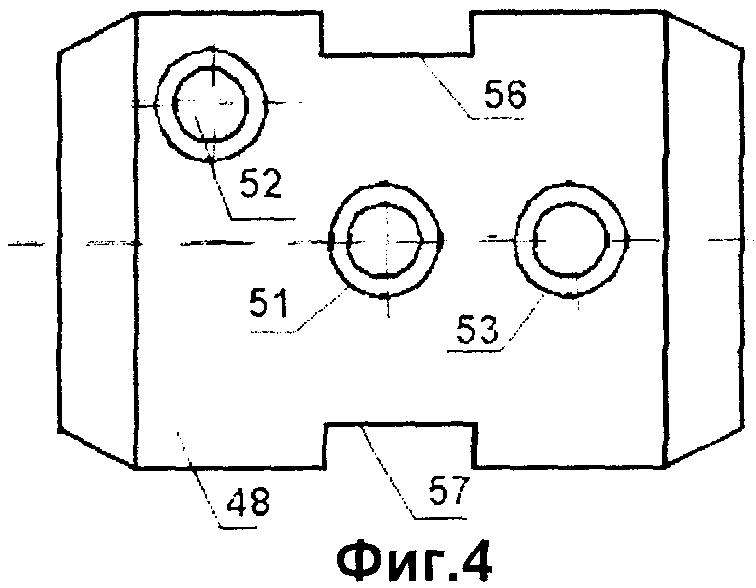
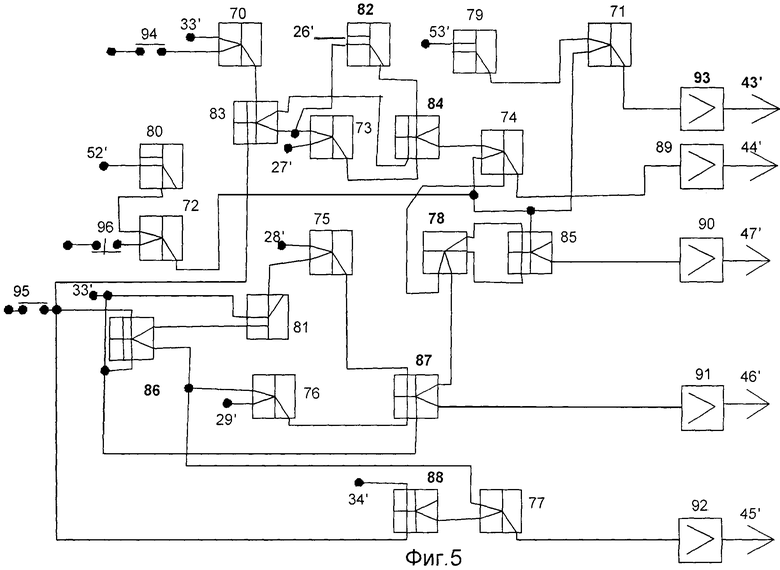
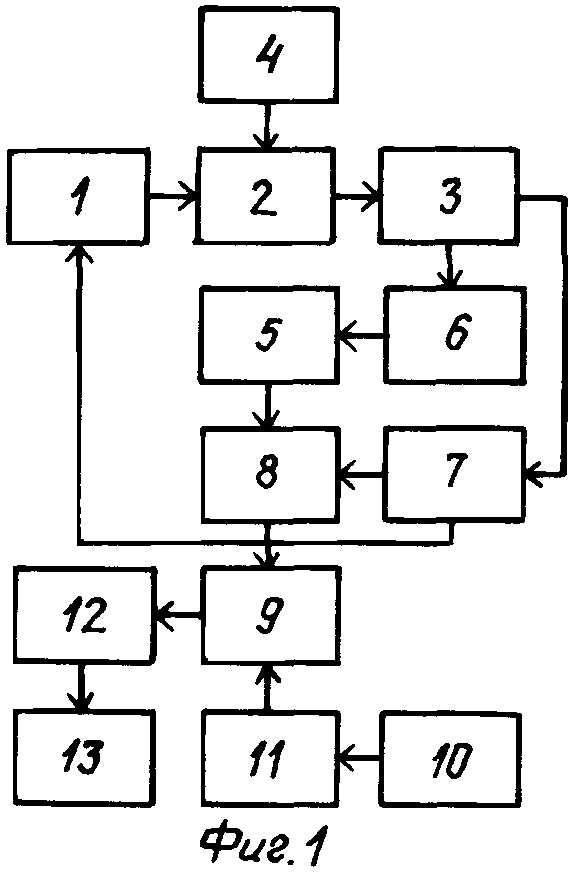
На фиг.1 представлена блок схема уровнемера, на фиг.2 - пневмокинематическая схема привода перемещения зонда; на фиг.3 - конструкция зонда в разрезе; на фиг.4 - вид по А на фиг.3; на фиг.5 - принципиальная схема блока управления приводом перемещения зонда; на фиг.6 - функциональная схема блока обработки информации; на фиг.7 - схема взаимодействия зонда с уровнем жидкости.
Уровнемер состоит из блока управления приводом перемещения зонда 1, привода перемещения зонда 2, ленты подвеса 3, блока ручного управления 4, блока счетчиков импульсов 5, считывающего устройства 6, зонда 7, блока управляемых вентилей 8, блока сумматоров 9, блока ручного управления задатчиком уровня 10, задатчика уровня 11, блока дешифраторов 12 и блока индикации 13.
Блок ручного управления приводом перемещения зонда 4, блок счетчиков импульсов 5, считывающее устройство 6, блок управляемых вентилей 8, блок сумматоров 9, блок ручного управления задатчиком уровня 10, задатчик уровня 11, блок дешифраторов 12 и блок индикации 13 образуют систему обработки измерительной информации.
Лента подвеса 3 намотана на барабан 14 (фиг.2) и на ней выполнены три дорожки перфорации: одна с шагом 1 м, вторая с шагом 1 см и третья с шагом 1 мм, с которыми взаимодействует считывающее устройство 6. Барабан 14 вращается на оси 15, установленной на опорах качения. Ось 15 барабана соединена с осями 16, 17 обгонными муфтами 18, 19 соответственно. На концы осей 16, 17 неподвижно насажены реечные зубчатые колеса 20, 21. Рейки нарезаны на штоках пневмоцилиндров 22, 23. На концах штоков расположены упоры 24, 25, взаимодействующие с конечными выключателями 26, 27, 28, 29. Конечные выключатели 26, 28 определяют исходное положение штоков, а 27, 29 - конечное.
Внешний обод барабана 14 взаимодействует с тормозной лентой 30, постоянно прижатой к ободу возвратной пружиной пневмоцилиндра 31.
Упор 32, закрепленный на ленте подвеса 3, определяет ее исходное (нулевое) положение. В исходном положении упор 32 взаимодействует с датчиком 33 нулевого положения ленты подвеса 3. Датчик 34 определяет путь торможения и плавного подхода упора 32 к датчику 33.
Пневмоцилиндры 22, 23, 31 управляются пневмораспределителями 35, 36, 37, 38, 39, на входы которых поступают управляющие сигналы от усилителей блока управления приводом 1. При этом выход пневмораспределителя 35 соединен со входом пневмоцилиндра 22; выход пневмораспределителя 36 соединен со входом пневмораспределителя 35; выход пневмораспределителя 38 соединен со входом пневмораспределителя 37; выход пневмораспределителя 37 соединен со входом пневмоцилиндра 23; выход пневмораспределителя 39 соединен со входом пневмоцилиндра 31. Входы пневмораспределителей 36, 38 и 39 соединены с линией питания 40.
На входе пневмораспределителей 35 и 37 установлены дроссели 41 и 42, служащие для регулирования скорости движения поршней пневмоцилиндров 22 и 23 соответственно. Входы управления 43, 44, 45, 46 и 47 пневмораспределителей 35, 36, 37, 38 и 39 соответственно, соединены с соответствующими выходами 43’, 44’, 45’, 46’ и 47’ усилителей блока 1 управления приводом (фиг.5).
На нижнем конце ленты подвеса 3 укреплен зонд 7 (фиг.2).
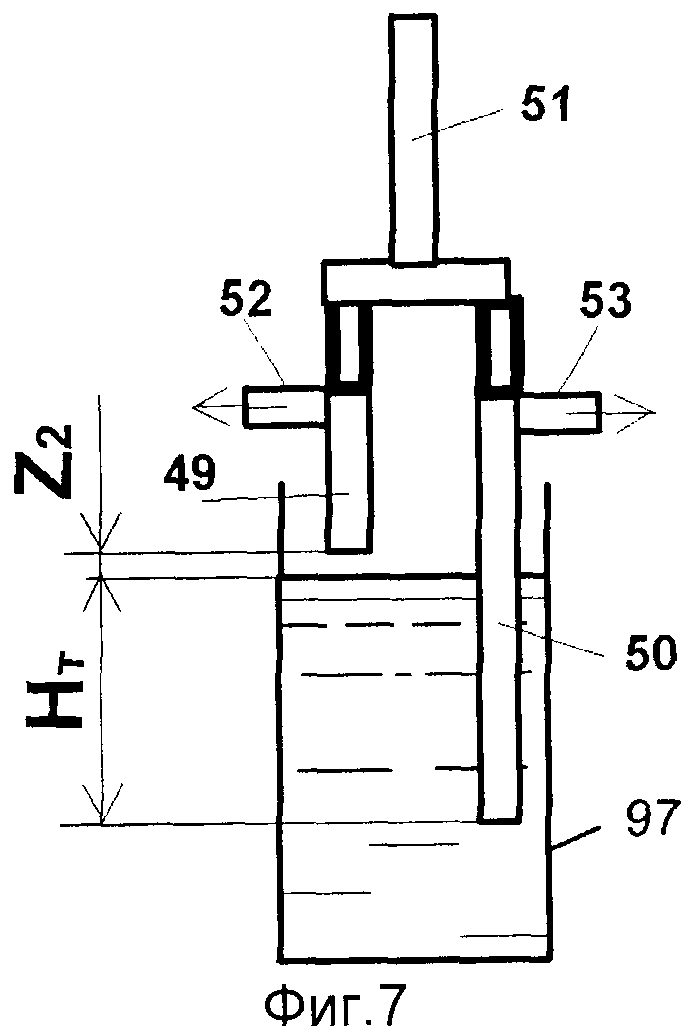
Зонд (фиг.3, 4) состоит из корпуса 48, в котором запрессованы измерительные сопла 49, 50, штуцер питания 51, штуцеры 52 и 53 съема выходных сигналов. Питание к измерительным соплам подается через штуцер 51 и дроссели 54, 55. Измерительное сопло 50 и дроссель 55 образуют первый датчик типа сопло-заслонка, а измерительное сопло 49 и дроссель 54 - второй датчик типа сопло-заслонка. Таким образом, зонд несет на себе два датчика типа сопло-заслонка, срезы сопл которых разнесены по высоте на некоторое расстояние Нт (фиг.7). Это расстояние выбирается равным или несколько большим тормозного пути привода перемещения зонда. В корпусе 48 выполнены пазы 56, 57 для крепления зонда на ленте подвеса 3.
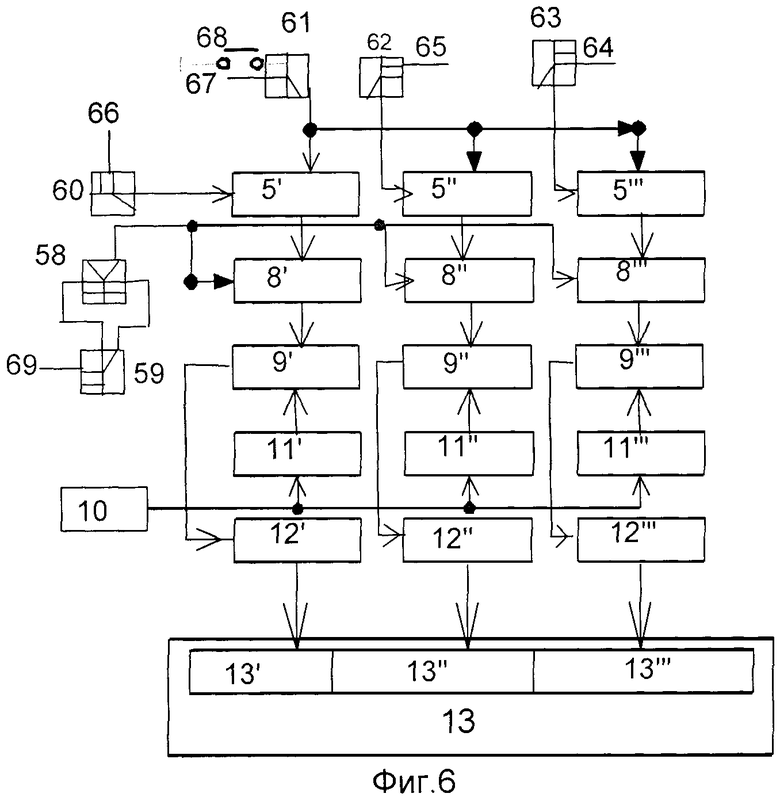
Функциональная схема системы обработки измерительной информации (фиг.6) включает счетчики 5 (содержащие три канала 5’, 5’’, 5’’’), вентили 8 (содержащие три канала 8’, 8’’, 8’’’), сумматоры 9 (содержащие три канала 9’, 9’’, 9’’’), блок ручного управления задатчиком уровня 10, задатчик уровня 11 (содержащий три канала 11’, 11’’, 11’’’), блок дешифраторов 12 (содержащий три канала 12’, 12’’, 12’’’), блок индикации 13 (содержащий три канала 13’, 13’’, 13’’’). В состав блока входят также триггер с раздельными входами 58, элементы ИЛИ/НЕ ИЛИ 59, 60, 61, 62, 63.
Выходы элемента 59 соединены с оппозитными входами триггера 58, а его выход соединен с входами запрета вентилей 8. Выход элемента 60 соединен с входом запрета счетчика метров 5’. Выходы элементов 62 и 63 соединены с входами запрета счетчиков 5’’ и 5’’’ сантиметров и миллиметров соответственно. Выход ИЛИ элемента 61 соединен со счетными входами счетчиков 5’, 5’’, 5’’’.
На вход 64 элемента 63 подается сигнал от считывающего устройства 6 (дорожка перфорации миллиметров). На вход 65 элемента 62 подается сигнал от считывающего устройства 6 (дорожка перфорации сантиметров). На вход 66 элемента 60 подается сигнал от считывающего устройства 6 (дорожка перфорации метров). Первый вход 67 элемента 61 соединен с выходом датчика 33, а на второй вход подается сигнал от кнопки 68 с нормально разомкнутым контактом. На вход 69 элемента 59 подается сигнал с выхода 52 зонда.
Выходы счетчиков 5’, 5’’, 5’’’ соединены с входами управляемых вентилей 8’, 8’’, 8’’’, выходы которых соединены с входами вычитания блока сумматоров 9’, 9’’, 9’’’. Входы суммирования блока сумматоров 9’, 9’’, 9’’’ соединены с выходами задатчика уровня 11’, 11’’, 11’’’. Выходы сумматоров 9’, 9’’, 9’’’ соединены со входами дешифраторов 12’, 12’’, 12’’’, выходы которых соединены с входами блока индикации 13’ (метры), 13’’ (сантиметры), 13’’’ (миллиметры).
Блок управления приводом 1 (фиг.5) построен на струйных элементах и содержит элементы И/НЕ-И 70, 71, 72, 73, 74, 75, 76, 77, 78, элементы ИЛИ/НЕ ИЛИ 79, 80, 81, 82, элементы "триггер с раздельными входами" 83, 84, 85, 86, 87, 88 и усилители 89, 90, 91, 92, 93, кнопки 94, 95 с нормально разомкнутым контактом, кнопка 96 с нормально замкнутым контактом.
Первый вход элемента 70 соединен с выходом 33’ датчика 33, а второй вход - с выходом кнопки 94, выход элемента 70 соединен с первым входом триггера 83. Вход элемента 80 соединен с сигналом 52’, снимаемым со штуцера 52 зонда 7, а его выход - с входом элемента 72, второй вход которого соединен с выходом кнопки 96. Выход элемента 72 соединен с входами элементов 71, 74 и 85. Выход кнопки 95 соединен с входами элементов 83, 86, 88. Выход 33’ датчика 33 соединен с входами элементов 81, 86 и оппозитным входом триггера 87. Выход 29’ конечного выключателя 29 соединен с входом элемента 76, выход 34’ датчика 34 соединен со вторым входом триггера 88. Первый вход элемента 82 соединен с выходом 26’ конечного выключателя 26. Вход элемента 79 соединен с сигналом 53’, снимаемым со штуцера 53.
Уровнемер работает следующим образом.
В исходном положении зонд 7 находится в верхнем положении. При этом упор 32 воздействует на датчик 33, который определяет исходное положение зонда 7. Все триггеры 83, 84, 85, 86, 87, 88 устанавливаются в исходное положение подачей сигнала при нажатии нормально разомкнутой кнопки 95 и выходными сигналами конечных выключателей 26, 28, 33, подаваемых по каналам 33’, 26’, 28’ (фиг.5). Если резервуар 97 (фиг.7) заполнен не до верхнего предельного уровня, то на выходе 52 (фиг.3) будет сигнал “0” и по цепи элементов 80, 72 подается подготовительный сигнал “1” на элементы 71, 74.
При нажатии кнопки 94 по цепи элементов 70, 83, 82, 84, 74 срабатывает усилитель 89, включая сигналом 44’ пневмораспределитель 44. Начинает работать пневмоцилиндр 22. В конце хода поршня упор 24 воздействует на конечный выключатель 27. По цепи элементов 73, 84, 74 усилитель 89 выключается, и поршень пневмоцилиндра 22 под действием пружины возвращается в исходное положение. При этом упор 24 воздействует на конечный выключатель 26, что снова приводит в действие цепь элементов 70, 83, 82, 84, 74. Срабатывает усилитель 89, включая пневмораспределитель 44 и т.д. То есть пневмоцилиндр 22 работает в генераторном режиме до тех пор, пока зонд 7 не достигнет уровня жидкости. В соприкосновение с жидкостью первым вступает измерительное сопло 50. При этом на выходе 53 появляется сигнал “1”, поступающий на вход 53’ элемента 79. По цепи элементов 79, 71 включается усилитель 93. Выходной сигнал 43’ усилителя подается на вход управления 43. Срабатывает пневмораспределитель 35, и пневмоцилиндр 22 переходит в режим движения с пониженной скоростью, поскольку сжатый воздух проходит в цилиндр 22 уже через дроссель 41.
При достижении измерительным соплом 49 (фиг.3) поверхности жидкости на расстояние Z3 (фиг.7), определяемое чувствительностью датчика, образованного соплом 49 и дросселем 54, на выходе 52 появляется сигнал “1”, подаваемый на вход 52 элемента 80. По цепи элементов 80, 72, 71, 74 блокируются усилители 89 и 93. Одновременно включается тормоз возвратной пружиной при срабатывании элементов 80, 72, 85. Усилитель 90 выключается. Выключается также пневмораспределитель 39.
Цепь подъема зонда 7 срабатывает от сигнала, подаваемого кнопкой 95. При этом срабатывает пневмоцилиндр 23. Остановка привода осуществляется по достижении зондом исходного положения, то есть при появлении сигнала “1” на выходе конечного выключателя 33.
При каждом одновременном выключении пневмоцилиндров 22 и 23 срабатывает тормоз, то есть выключается усилитель 90 и поршень пневмоцилиндра 31 под действием возвратной пружины прижимает тормозную ленту 30 к ободу барабана 14, что предотвращает самопроизвольное перемещение зонда.
В момент времени, когда зонд 7 находится в исходном положении, на вход 67 подается сигнал от датчика 33, нажатием кнопки 68 все счетчики 5’, 5’’, 5’’’ (фиг.6) сбрасываются в нулевое положение.
При работе пневмоцилиндра 22 зонд 7 опускается и с выхода считывающего устройства 6 подаются сигналы от трех дорожек перфорации ленты 3 на входы 64, 65 и 66 элементов 63, 62 и 60 соответственно и далее на счетные входы счетчиков 5’’’, 5’’, 5’.
В момент достижения зондом 7 уровня жидкости на выходе 52 зонда (фиг.3) появляется сигнал “1”, который подается на вход 69 элемента 59 (фиг.6). Триггер 58 переключается и на входы вентилей 8’, 8’’, 8’’’ подается открывающий сигнал. Результат счета, таким образом, соответствует степени опорожнения емкости. Результат счета числа импульсов от счетчиков поступает на вход вычитания сумматоров 9’, 9’’, 9’’’. На входы сложения сумматоров подаются сигналы от задатчиков уровня 11’, 11’’, 11’’’. Задатчиком уровня 11 задается величина, соответствующая полностью опорожненной емкости. Таким образом, разность между числом, соответствующим полностью опорожненной емкости, и фактической степенью опорожнения и будет равна фактическому уровню жидкости в емкости. Выходы сумматоров 9’, 9’’, 9’’’ через дешифраторы 12’, 12’’, 12’’’ подаются в блок индикации 13’, 13’’, 13’’’, где и индицируется уровень жидкости в емкости.
Для сброса схемы в исходное состояние необходимо подать сигнал “Установка в 0” нажатием кнопок 68 и 95, либо нажать кнопку 94.
В режиме ручного управления необходимый уровень задается от блока 11.
Применение предлагаемого уровнемера позволяет автоматизировать процесс контроля степени заполнения резервуаров с огнеопасными и пожароопасными жидкостями и суспензиями.
Источник информации
1. Измерения в промышленности. Справ, изд. В 3-х кн. Кн.2. Под ред. Профоса П. - М.: Металлургия, 1990, 384 с. (рисунок 3.4-65, стр. 18).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для струйной промывки деталей | 1991 |
|
SU1838001A3 |
| Установка для непрерывной высокочастотной сварки длинномерных изделий из полимерных материалов | 1987 |
|
SU1581593A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УРОВНЯ | 1972 |
|
SU333409A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ РУДНЫХ МАТЕРИАЛОВ | 1992 |
|
RU2006046C1 |
| Уровнемер | 1990 |
|
SU1737276A1 |
| Система управления манипулятором | 1978 |
|
SU746402A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2068174C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УСРЕДНЕННОЙ СКОРОСТИ СХОДА ШИХТЫ В ДОМЕННОЙ ПЕЧИ | 1992 |
|
RU2048529C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| Способ межоперационных перемещений спутников и устройство для его осуществления | 1989 |
|
SU1785874A1 |
Изобретение относится к измерительной технике, а именно к измерению уровня жидкостей и суспензий. Сущность: уровнемер содержит зонд, подвес зонда, привод перемещения зонда и систему обработки информации. На зонде размещены два пневматических датчика типа сопло-заслонка. Срезы сопл разнесены по высоте на расстояние, равное или несколько большее тормозного пути привода. Выход первого датчика соединен с входом блока управления приводом перемещения зонда, блокирующим быстрый подвод зонда, выход второго датчика соединен со входом блока управления приводом перемещения зонда, блокирующим перемещение зонда. Подвес зонда выполнен в виде ленты, имеющей три дорожки перфорации с шагами 1 м, 1 см и 1 мм, взаимодействующие со считывающим устройством. Выходы считывающего устройства соединены со входом счетчиков, выходы которых через управляемые вентили соединены со входами вычитания сумматоров. Входы суммирования сумматоров соединены с выходами задатчика уровня. Выходы сумматоров через дешифраторы соединены с блоком индикации. Технический результат: повышение точности измерения уровня взрывоопасных жидкостей и суспензий. 7 ил.
Уровнемер прецизионный взрывобезопасный, содержащий зонд, подвес зонда, привод перемещения зонда и систему обработки измерительной информации, отличающийся тем, что на зонде размещены два пневматических датчика типа сопло-заслонка, срезы сопл которых разнесены по высоте на расстояние, равное или несколько большее тормозного пути привода, выход первого датчика соединен со входом блока управления приводом перемещения зонда, блокирующим быстрый подвод зонда, выход второго датчика соединен со входом блока управления приводом перемещения зонда, блокирующим перемещение зонда, подвес зонда выполнен в виде ленты, имеющей три дорожки перфорации с шагами 1 м, 1 см и 1 мм, взаимодействующие со считывающим устройством, выходы считывающего устройства соединены со входами счетчиков, выходы которых через управляемые вентили соединены с входами вычитания сумматоров, а входы суммирования сумматоров соединены с выходами задатчика уровня, выходы сумматоров через дешифраторы соединены с блоком индикации.
| Датчик утечек жидкости | 1989 |
|
SU1714376A1 |
| Уровнемер | 1980 |
|
SU926536A1 |
| GB 882077 А, 08.11.1961 | |||
| US 4000651 А1, 04.01.1977 | |||
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |

