(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| СИЛОКОМПЕНСИРУЮЩИЙ ЭЛЕКТРОПРИВОД СБАЛАНСИРОВАННОГО МАНИПУЛЯТОРА | 2011 |
|
RU2454694C1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Устройство для управления приводом робота | 1988 |
|
SU1580317A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
t
Изобретение относится к робототехнике и может быть использовано при создании систем управления манипулятором с комбинированным приво- 5 дом.
Извертны системы управления манипулятором, содержащие по каждой регулируемой координате задатчик управляющего сигнала, сумматор, уси- JQ литель, пневмопривод, и датчик положения Ll3 .
Однако эти системы имеют плохие регулировочные характеристики.
Наиболее близким техническим ре- 15 шением к изобретению является система, содержащая последовательно соединенные задатчик управлянвдего сигнала, первый сумматор, первый усилитель, второй сумматор, второй 20 усилитель и электродвигатель, связанный с датчиком скорости и через редуктор -со звеном манипулятора и датчиком перемещения, выход которого соединен со вторым входом пер- 25 вого сумматора, выход датчика скорости подключен ко второму ходу второго сумматора. Эта система имеет высокие регулировочные характеристики 2 .30
Недостатком этой системы является низкая удельная мощность.
Целью изобретения является расширение области применения системы.
Поставленная цель достигается тем, что система содержит последовательно соединенные логический блок, пневмораспределитель и пневмоцилиндр, связанный со звеном манипулятора, первый вход логического блока соединен с выходом первого сумматора, а второй вход - с выходом второго сумматора.
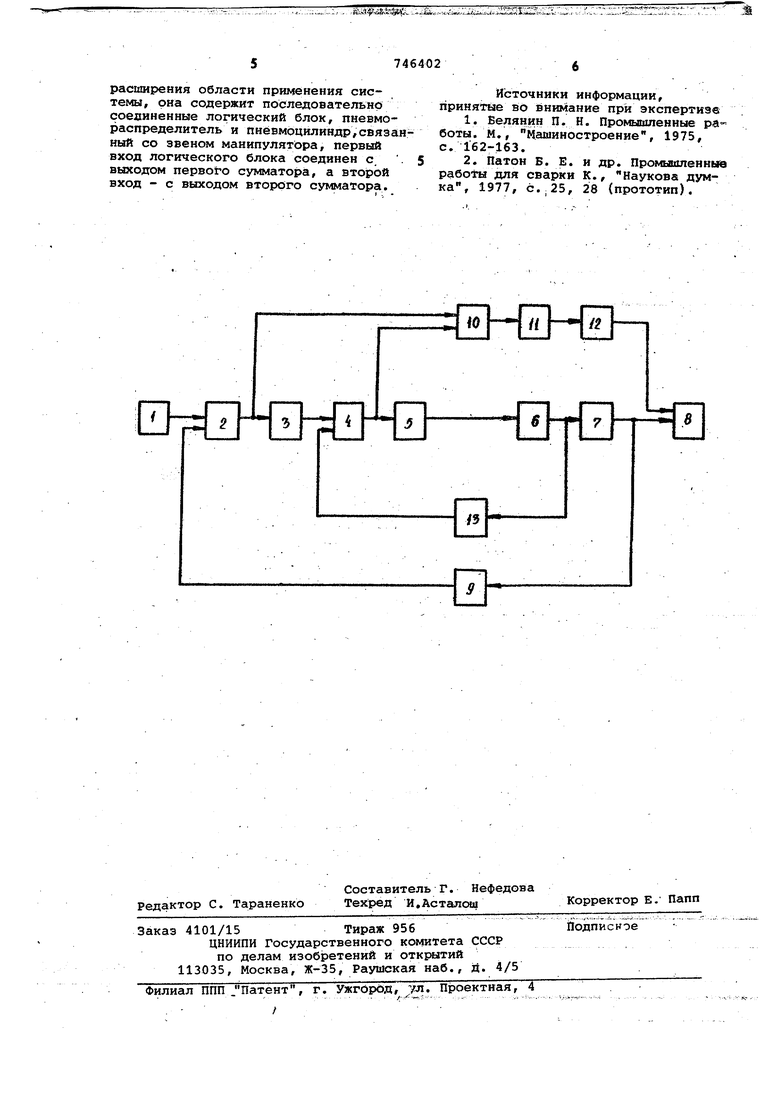
На чертеже представлена функциональная схема системы.
Система упоавления манипулятора содержит задатчик 1 управляющего сигнала, первый сумматор 2, первый усилитель 3, второй сумматор 4, второй усилитель 5, электродвигатель 6, редуктор 7, звено 8 манипулятора,датчик 9 перемещения, логический блок 10, пневмораспределитель 11, пнев юцилиндр 12, датчик 13 скорости.
Система работает следующим образом.
:Командный: сигнал, поступающий с блока управляющего сигнала, и сигнал датчика 9 перемещения, вычитаясь
746402
в; nepBuM бумма Ьре 2, образуют сигнал рассогласбвания по положению, которьЕй, пройдя первый Усилитель 3 сигнала рассогласования по положению, поступает на вход второго сумматора 4, Где из него вычитается поступающий туда же сигнал от датчика 13 скорости и образуется сигнал рассогласования .по скорости, который, пройдя второй усилитель 5 сигнала рассог ласования по скорости, поступает на вход электродвигателя б, который начинает вргодаться и через редуктор 7 привоит в движение звено 8 манипулятора. Одновременно сигнал рассогласоёа йя по положению с выхода первого суммаtopa 2 и сигнал рассогласования по
скорости с выхода второго сумматора 4 поступают на входы логического блока 10, который в соответствии ср знаIfSMH/ поступающих на ёго йходы сйгналой ВБЩеляет режимы торможения и рабочих перемещений и вырабатывает соответствующие фиксирова:нныё бйгналы. Пневмораспределите ; 11 соединяет раббчйе полостй пневмо цилиндра 12 с магистралью и атмосферой в соответствии с сигналами на выходе; л«5гическрго блока 10 и пневмоциляндр 12 начинает разгоняться взаййнндмнаправлени 1, приводя в движение звено 8 манипулятора. При превышений электродвигателем б (звеном 8 манипулятора) скорости, cfobTветствукЕЦей сигналу, поступающему от первого усилителя 3 сигнала рассогласования по положению, сигнал рассогласования скорости меняет свой знак, логический блок 10 вырабатывает сигнал торможения. Логика управления пневмораспределителем.11 в режиме торможения определяется требуемыми динамическими качествами системы привода и может быть, например такой, когда пневмораспределитель 11 в рёжймё торможения соединяет с магистралью обе пдлости пневмоцилиндра 12, который начинает тормозиться. Одновременно начинает тормозиться электродвигатель б, вследствие иэменения знака выхЬднохосйгйаяавтбрбгб усилителя 5. Торможение продолжается до тех пор, пока сигнал рассогласования по ско)рсти.внов1Ь не поменяет своего знака вслёдетвие снижений скорости ниже заданной. Таким образом обеспе-
чрваётёя отработка системой заданной с| орости.
Аналогйчннм образом система перейдет в режим торможения при изм0 йВЦ|и знака сигнала рассогласбвания по скорости вследствие умёньшёйгйЯГвеличины crirHaiia расеогласо- . вания по положейию. В эТом случае торможение происходит дО т ОР ока скорость Ни уменьшится до вёлгггййы, соответствующей йОвбм Шгнала рассогласования по положейию
(в частном случае до нуля). Таким образом обеспечивается отработка системой заданного перемещения. При реверсе привода изменит свой знак сигнал рассогласования по положению вследствие изменения зйака входного командного сигнала, поступающего с задатчика 1 управляющего сигнала, и следовательно, изменит свой знак сигнал рассогласования по скорости, логический блок
10 Выдает соответствующий сигнал на ПневмораспреДёлитель 11, который соединит полОсти пневмоцилиндра 12 с атмосферой и магистралью противопс1ложным образом, вследствие чего
пневмоцилиндр 12 сначала затормозится, а затем начнет разгон в противоположную сторону.
Соотношение номинальных мощностей пневмоцилиндра и злектродвигателя лежит впределах{10-15)/ при соотношении максимальных развиваемых усилий в переходных режимах 2-3/1, что обусловлено возможйостью электродвигателей многократно превышать йоминальный движущий момент в режимах пуска и торможения.
При пуске привода электродвигатель развивает максимальный движущий момент, который по мере нарастания движущего усилия пневмоцилиндра
и увеличения скорости постепенно спадает до величины, обусловленной откло-. нением скорости от заданной величины и при движении привода со скоростью,близкой К заданной, электродвигатель оказывается практически разгруженным, То е . в предлагаемом приводе основную энергетическую нагрузку несет пневмоцилиндр, а электродвигатель вырабатывает кратковременные силовые
воздействия при пусках и торможениях привода, что улучшает динамику системы и исключает влияние флуктуации величины силы трения уплотнений пневмоцилиндра на процесс точного позиционирования. :
Применение изобретения позволит в диапазоне приводнБпс мощйостей до 1,5 ; кВт повысить удельную мощность Привода системы управления манипулятора в 27-5 раз.
Формула изобретения
Система управления манипулятором, соде|ржащая последовательно соединенные Эадатчик управлякмцего сигнала, первый сумматор, первый усилитель, второй сугФяатор, второй усилитель и электродвигатель, связанный с датчиком скорости и через редуктор со з Ё1ёном манипулятора и датчиком перемещения, выход которого соедийен со вторым входом первого сумматора, выход датчика скорости подключен ко BTOjpOMy входу сумматора, о т л и ч а ю щ а я с я тем, что с целью
расширения области применения системы, она содержит последовательно соединенные логический блок, пневмораспределитель и пнёвмоцилиндр,связанный со звеном манипулятора, первый вход логического блока соединен с . выходом первого сумматора, а второй вход - с выходом второго сумматора.
6
Источники информации, принятые во внимание при экспертизе
с. 162-163.
ка.
8
