Изобретение относится к бортовым системам автоматического управления летательными аппаратами с самолетной схемой с реализацией возможности режимов с разворотами в продольном канале с большими углами тангажа и координированных разворотов в боковом канале с большими углами крена и курса.
Известны системы автоматического управления, в которых каждый из каналов управления по тангажу, крену и курсу содержит элемент вычитания и суммирующий усилитель, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на исполнительные приводы летательного аппарата [1].
Недостатком такой реализации является ограниченность возможностей управления в каждом из указанных каналов при разгруженности смежных.
Наиболее близким к предлагаемому изобретению является устройство формирования управляющих сигналов для системы управления летательным аппаратом, содержащее блок кинематической разводки, последовательно соединенные задатчик угла тангажа, первый блок вычитания, первый суммирующий усилитель, последовательно соединенные задатчик угла курса, второй блок вычитания, второй суммирующий усилитель и последовательно соединенные задатчик угла крена, третий блок вычитания и третий суммирующий усилитель, выходы датчика угла тангажа, датчика угловой скорости по тангажу, датчика угла курса, датчика угловой скорости по курсу, датчика угла крена и датчика угловой скорости по крену соединены соответственно со вторыми входами первого блока вычитания, первого суммирующего усилителя, второго блока вычитания, второго суммирующего усилителя, третьего блока вычитания и третьего суммирующего усилителя, а выходы блока кинематической разводки являются первым, вторым и третьим выходами устройства [2].
Недостатком известного устройства являются ограниченные функциональные возможности и невысокая точность управления.
Решаемой в предложенном устройстве технической задачей является расширение функциональных возможностей устройства и повышение точности управления. Предложенным построением устройства достигается оптимальная по потребности возможность распределения интенсивностей (уровней) управления в каждом из каналов.
Указанный технический результат достигается тем, что в известное устройство формирования управляющих сигналов для системы управления летательным аппаратом, содержащее блок кинематической разводки, последовательно соединенные задатчик угла тангажа, первый блок вычитания, первый суммирующий усилитель, последовательно соединенные задатчик угла курса, второй блок вычитания, второй суммирующий усилитель и последовательно соединенные задатчик угла крена, третий блок вычитания и третий суммирующий усилитель, выходы датчика угла тангажа, датчика угловой скорости по тангажу, датчика угла курса, датчика угловой скорости по курсу, датчика угла крена и датчика угловой скорости по крену соединены соответственно со вторыми входами первого блока вычитания, первого суммирующего усилителя, второго блока вычитания, второго суммирующего усилителя, третьего блока вычитания и третьего суммирующего усилителя, а выходы блока кинематической разводки являются первым, вторым и третьим выходами устройства, дополнительно введены первый, второй и третий блоки ограничения, входы которых соединены соответственно с выходами первого, второго и третьего суммирующих усилителей, а выходы - с первым, вторым и третьим входами соответственно блока кинематической разводки, причем уровни ограничения первого и второго блоков ограничения определяются соответственно по зависимостям:
A1=σ 2max-A3+Kγ A2,
A2=σ 1max-Kψ A3,
где σ 1max, σ 2max - сигналы максимальных отклонений рулей,
А1, А2, А3 - уровни ограничения в первом, втором и третьем блоках ограничения,
Кγ Кψ - передаточные числа блока кинематической разводки.
Кроме того, блок кинематической разводки содержит три сумматора, два инвертора и два усилителя, первый вход блока подключен к первым входам первого и второго сумматоров, второй вход - к первому входу третьего сумматора и через последовательно соединенные первый усилитель и первый инвертор - ко второму входу первого сумматора, третий вход - к третьему входу первого сумматора, через второй усилитель - ко второму входу третьего сумматора и через второй инвертор - ко второму входу второго сумматора, третьим входом подключенного к выходу первого усилителя, а выходы третьего, первого и второго сумматоров являются соответственно первым, вторым и третьим выходами блока кинематической разводки.
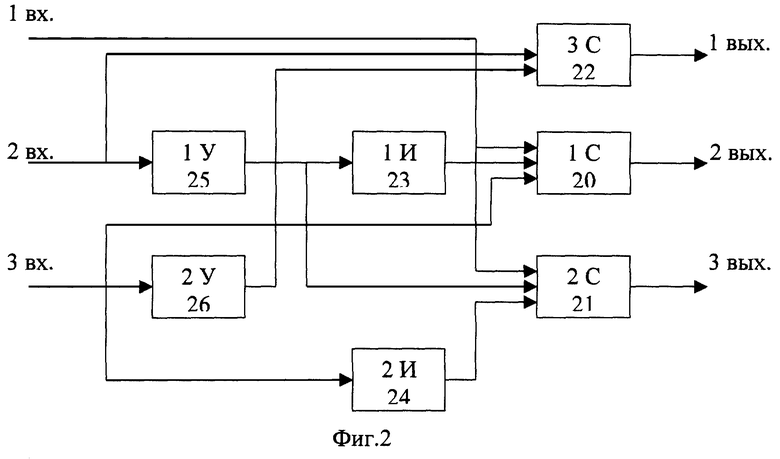
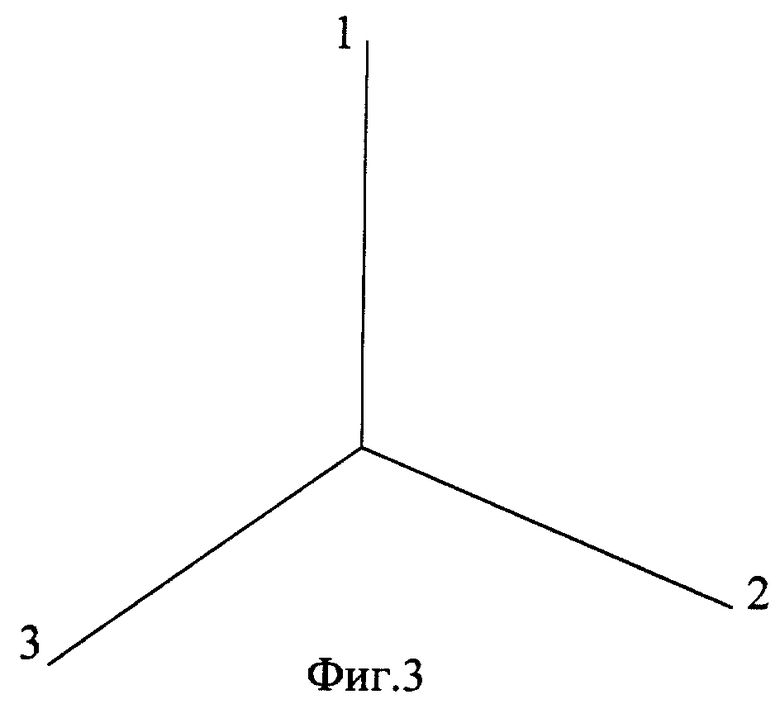
На фиг.1 представлена структурная схема устройства формирования управляющих сигналов, на фиг.2 - структурная схема блока кинематической разводки сигналов управления, на фиг.3 - пример схемы расположения рулей летательного аппарата.
Устройство формирования управляющих сигналов для системы управления летательным аппаратом (фиг.1) содержит блок кинематической разводки 1 (БКР), последовательно соединенные задатчик угла тангажа 2 (ЗУТ), первый блок вычитания 3 (1 БВ), первый суммирующий усилитель 4 (1 СУ), последовательно соединенные задатчик угла курса 5 (ЗУКур), второй блок вычитания 6 (2 БВ), второй суммирующий усилитель 7 (2 СУ) и последовательно соединенные задатчик угла крена 8 (ЗУКр), третий блок вычитания 9 (3 БВ), третий суммирующий усилитель 10 (3 СУ), выходы датчика угла тангажа 11 (ДУТ), датчика угловой скорости по тангажу 12 (ДУСТ), датчика угла курса 13 (ДУКур), датчика угловой скорости по курсу 14 (ДУСКур), датчика угла крена 15 (ДУКр) и датчика угловой скорости по крену 16 (ДУСКр) соединены соответственно со вторыми входами первого блока вычитания 3, первого суммирующего усилителя 4, второго блока вычитания 6, второго суммирующего усилителя 7, третьего блока вычитания 9 и третьего суммирующего усилителя 10, а выходы блока кинематической разводки 1 являются первым, вторым и третьим выходами устройства. Кроме того, устройство содержит первый 17 (1 БО), второй 18 (2 БО) и третий 19 (3 БО) блоки ограничения, входы которых соединены соответственно с выходами первого 4, второго 7 и третьего 10 суммирующих усилителей, а выходы - с первым, вторым и третьим входами соответственно блока кинематической разводки 1.
Блок кинематической разводки 1 (фиг.2) содержит три сумматора 20, 21, 22, два инвертора 23, 24 и два усилителя 25, 26, первый вход блока подключен к первым входам первого 20 (1 С) и второго 21 (2 С) сумматоров, второй вход - к первому входу третьего сумматора 22 (3 С) и через последовательно соединенные первый усилитель 25 (1 У) и первый инвертор 23 (1 И) - ко второму входу первого сумматора 20, третий вход - к третьему входу первого сумматора 20, через второй усилитель 26 (2 У) - ко второму входу третьего сумматора 22 и через второй инвертор 24 (2 И) - ко второму входу второго сумматора 21, третьим входом подключенного к выходу первого усилителя 25, а выходы третьего, первого и второго сумматоров являются соответственно первым, вторым и третьим выходами блока кинематической разводки.
Устройство формирования управляющих сигналов работает следующим образом.
Основные сигналы управления в каналах тангажа, курса и крена σ 0в, σ 0н и σ 0э формируются соответственно блоками 2, 3, 4, 11, 12 канала тангажа, 5, 6, 7, 13, 14 канала курса и 8, 9, 10, 15, 16 канала крена:
σ 0в=K1ϑ Δϑ+K2ϑ ω zд, (1)
σ 0н=K1ψ Δψ+K2ψ ω уд (2)
σ 0э=K1γ Δ γ+K2γ ω хд (3)
Δ ϑ =ϑ д-ϑ зад,(4)
Δ ψ =ψ д-ψ зад (5)
Δ γ =γ д-γ зад, (6)
где К1ϑ , К2ϑ - передаточные коэффициенты первого суммирующего усилителя 4;
Δ ϑ - сигнал рассогласования по тангажу на выходе первого блока вычитания 3;
ϑ д - входной сигнал от датчика угла тангажа 11;
ϑ зад - задающий сигнал по тангажу на выходе задатчика угла тангажа 2;
ω zд - входной сигнал от датчика угловой скорости по тангажу 12;
К1ψ , К2ψ - передаточные коэффициенты второго суммирующего усилителя 7,
Δ ψ - сигнал рассогласования по курсу на выходе второго блока вычитания 6,
ψ д - входной сигнал от датчика угла курса 13,
ψ зад - задающий сигнал по курсу на выходе задатчика угла курса 5,
ω уд - входной сигнал от датчика угловой скорости по курсу 14.
K1γ , K2γ - передаточные коэффициенты третьего суммирующего усилителя 10;
Δ γ - сигнал рассогласования по крену на выходе третьего блока вычитания 9;
γ д - входной сигнал от датчика угла крена 15;
γ зад - задающий сигнал по крену на выходе задатчика угла крена 8,
ω хд - входной сигнал от датчика угловой скорости по крену 16.
Сформированные основные сигналы управления в каналах тангажа, курса и крена σ 0в, σ 0н и σ 0э далее ограничиваются соответственно блоками ограничения 17, 18 и 19, после которых сигналы σ в, σ н и σ э поступают на первый, второй и третий входы блока кинематической разводки 1, в котором производится распределение сигналов управления непосредственно по рулевым приводам, например для указанной самолетной схемы рулей (фиг.3) в виде:
σ 1=σ н+Кγ σ э, (7)
σ 2=σ в+σ э-Кψ σ н, (8)
σ 3=σ в-σ э+Кψ σ н, (9)
где Кγ и Кψ - передаточные числа блока кинематической разводки 1 (фиг.1), реализованные соответственно на блоках 20-26 (фиг.2).
Сигнал σ 1, для выхода на 1-й рулевой привод по зависимости (7) формируется блоками 22 и 26, сигнал σ 2 для выхода на 2-й рулевой привод по зависимости (8) формируется блоками 20, 23 и 25, сигнал σ 3 для выхода на 3-й рулевой привод по зависимости (9) формируется блоками 21,24 и 25. Необходимо отметить, что ограничения сигналов управления σ в, σ н и σ э в блоках ограничения с учетом полного использования хода рулей и для использования сигналов управления между каналами при определенных ограниченных по максимуму отклонениях рулей летательного аппарата, соответствующих сигналам σ 1, σ 2 и σ 3 должны быть также определены на основе зависимостей (7), (8) и (9). А именно сигналы на σ 2 и σ 3, исходя из максимальных отклонений соответствующих рулевых приводов по модулю равны между собой. Следовательно, при расчете ограничений достаточно рассмотреть зависимость (7) и одну из двух зависимостей (8) или (9) с учетом полярностей сигналов. Пусть σ н>0, σ э>0, тогда, изменив σ в>0, рассматриваются ограничения на основе зависимостей (7) и (8). И пусть ограничение по сигналу σ в=А1, по сигналу σ э=А3, а по сигналу σ э=А3. Обозначим также максимум σ 1=σ 1max σ 2=σ 2max и σ 3=σ 3max при этомσ
σ 1max=A2+Кγ A3, (10)
σ 2max=A1+A3-Кψ A2. (11)
Поскольку имеем два уравнения с тремя неизвестными, то одним значением необходимо задаться. Целесообразно задаться либо минимумом по распределению сигналов (например, по каналу курса A2), либо максимумом (либо по тангажу A1, либо по крену А3). Наиболее целесообразным является задание А3, например, для координированного управления. Соответственно, из (10) и (11) получатся необходимые ограничения в двух других каналах.
Все звенья управляющей части устройства, в частности логические звенья, являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники.
Таким образом, предложенное устройство формирования управляющих сигналов для системы управления летательным аппаратом позволяет расширить функциональные возможности системы и повысить точность управления.
Источники информации
1. И.А.Михалев и др. Системы автоматического управления самолетом. М.: Машиностроение, 1987 г., с.174.
2. Патент РФ №1751716, кл. G 05 В 13/02, 30.07.92 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367993C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| МОДЕРНИЗИРОВАННОЕ АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2554515C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2005 |
|
RU2293366C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2006 |
|
RU2302030C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ДЛЯ РУЛЕВЫХ ПРИВОДОВ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2703007C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2532720C1 |
Изобретение относится к бортовым системам автоматического управления летательными аппаратами с самолетной схемой с реализацией возможности режимов с разворотами в продольном канале с большими углами тангажа и координированных разворотов в боковом канале с большими углами крена и курса. Техническим результатом изобретения является расширение функциональных возможностей и повышение точности управления. Предложенным построением устройства достигается оптимальная по потребности возможность распределения интенсивностей (уровней) управления в каждом из каналов. Устройство формирования управляющих сигналов для системы управления летательным аппаратом содержит блок кинематической разводки, датчики угла тангажа и угловой скорости по тангажу, датчики угла курса и угловой скорости по курсу, датчики угла крена и угловой скорости по крену, задатчики угла тангажа, угла курса и угла крена, три блока вычитания, три суммирующих усилителя и три блока ограничения. 1 з.п. ф-лы, 3 ил.

где σ1max, σ2max - сигналы максимальных отклонений рулей, первого и второго рулевых приводов;
А1, А2, А3 - уровни ограничения первого, второго и третьего блоков ограничения;
Кγ, Кψ - передаточные числа блока кинематической разводки по третьему и второму входам соответственно.
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| US 5031102 A, 09.07.1991 | |||
| МИХАЛЕВ И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174. | |||
