Изобретение относится к области авиационной техники и может быть использовано в качестве системы автоматического вывода самолета из критических режимов полета в штатный режим полета, для предотвращения вхождения в опасные режимы, повышения надежности вывода из этих режимов и безопасности полетов.
Известна система вывода самолета из режимов штопора, в которой осуществляется последовательное отклонение рулевых поверхностей. По собственному ощущению в полете летчик определяет характер движения и выполняет рекомендованные отклонения рулей на вывод из критических режимов полета (Снешко Ю.И., Четвергов В.Н. Определение характеристик штопора самолета. Методы определения характеристик устойчивости самолета. - М.: Машиностроение, 1994 г.).
Недостатком этой системы является вероятность ошибки при анализе летчиком характера движения, увеличение запаздывания начала вывода и, как следствие, недостаточная надежность вывода из режима штопора.
Известно устройство для предупреждения от вхождения в штопор, расположенное на кромке атаки самолета или планера (Патент FR 2826632 А1, 29.06.2001, кл. МПК В 64 D 43.02).
Устройство содержит датчик давления, датчик разницы давления и прерыватель. Как только давление на передней кромке крыла становится меньше, чем давление окружающей среды, прерыватель замыкает электрическую цепь, которая приводит в действие клаксон, подающий сигнал пилоту об угрозе вхождения в штопор.
Однако при использовании таких средств, сигнализирующих о приближении к опасным режимам, также существует большая вероятность ошибки летчика при выводе из режимов сваливания или штопора.
Известны способ и устройство для вывода из штопора маневренных самолетов по пятому методу, который применяется в основном при наличии "вторых" устойчивых балансировок на больших углах атаки (см. Ахромеев В.А., Гоман М.Г. и др. "Автоматизация вывода маневренного самолета из режима штопора. Техника воздушного флота, №3, 1991 г.).
В качестве анализатора попадания самолета в режим штопора предлагается алгоритм, использующий время, в течение которого значение угловой скорости рыскания ωу превышает заданное в случае вращательного движения в штопоре, или время, в течение которого угол атаки превышает заданное значение при полном отклонении стабилизатора в случае "падения листом".
Для вывода из этих режимов используют метод динамической или резонансной раскачки с последующим применением для вывода из штопора ранее известных методов. Автоматизация перехода к режиму штатного полета в устройстве не предусмотрена.
Известно устройство для предотвращения входа в штопор маневренного самолета, патент РФ №601892, кл. МПК В 64 С 13.18.
Устройство содержит датчики угла скольжения, угловой скорости крена, угла атаки, анализатор режимов штопора, задатчик порогового значения угла атаки, схему сравнения, вычитающий элемент, формирователь команд с блоком логики, подключенный к усилительно-преобразующему устройству, преобразующему сигналы и выдающему команды на отклонение управляющих органов самолета.
Вычитающий элемент устройства формирует сигнал, пропорциональный приращению угла атаки за счет угловой скорости крена в соответствии с зависимостью, где формируемый сигнал пропорционален приращению угла атаки только за счет наличия угла скольжения и получен путем соответствующего масштабирования сигнала с датчика угла скольжения. В логическом устройстве проводится последовательное сравнение выходного сигнала с задатчиком и с сигналом датчика угла скольжения. Происходит последовательное отклонение рулей.
Устройство не обеспечивает устойчивую работу системы управления па всех режимах полета, в нем не предусмотрена автоматизация перехода к штатному режиму полета, увеличивается время от срыва в штопор до выхода из него, а следовательно, и перепад высот, что снижает надежность устройства и безопасность полета.
Сущность изобретения
Задачей изобретения является создание устройства, осуществляющего автоматический вывод самолета из режимов сваливания и штопора в режим штатного полета, обеспечивающего повышенную надежность, устойчивую работу системы управления на всех режимах полета, улучшение управляемости на всех углах атаки, в том числе превышающих закритические значения.
Кроме того, заявляемое устройство должно обладать высокой эффективностью вывода из режимов штопора в штатный режим полета самолета за счет уменьшения потери высоты.
В соответствии с изобретением поставленная задача достигается тем, что устройство автоматического выведения самолета из режимов сваливания и штопора в штатный режим полета, содержащее блок информационных датчиков угловых скоростей рыскания, крена, тангажа, расположенных в связанной с самолетом системе координат, вертикальной перегрузки, углов атаки, крена, тангажа, скоростного напора, анализатор режима полета, задатчик пороговых значений, блок логики, устройство сравнения, суммирующие устройства, подключенные к приводам руля направления, элеронов и руля высоты, выполнено связанным с блоком демпфирования самолета, обеспечивающим остановку вращения самолета во всем диапазоне углов атаки. При этом первый, второй, третий, четвертый и пятый входы блока демпфирования соединены с выходами датчиков угловой скорости рыскания, угловых скоростей крена и тангажа, углов атаки и скоростного напора соответственно. Первый, второй и третий выходы блока демпфирования соединены в блоке логики с первыми входами первого, второго и третьего суммирующих усилителей каналов руля направления, элеронов, руля высоты соответственно. Выходы первого, второго и третьего суммирующих усилителей соединены с первыми входами первого, второго и третьего безвозвратных переключателей типа "или-или", вторые входы которых подключены соответственно к выходам усилителей приводов руля направления, элеронов и руля высоты штатной системы управления, а выходы этих переключателей соединены с входами рулевых приводов руля направления, элеронов и руля высоты.
Кроме того, анализатор режимов сваливания и штопора в заявляемом устройстве выполнен из последовательно соединенных вычислителя угловой скорости рыскания ψ, фильтра высоких частот, блока абсолютной величины сигнала, блока выработки команды управления блоком логики. При этом входы вычислителя соединены с выходами датчиков угла тангажа, угла крена, угловой скорости рыскания, угловой скорости крена, расположенных в связанной с самолетом системе координат (ωx, ωy, ωz). Более того, в блок логики дополнительно включены задатчики пороговых значений угла тангажа, вертикальной перегрузки Nузад и скоростного напора, ограничители сигналов по углам тангажа и крена, устройство сравнения типа "да-нет" заданного и текущего значения скоростного напора первым входом, соединенным с датчиком скоростного напора, вторым входом - с задатчиком скоростного напора, и выходом соединенным через первый переключатель без самовозврата типа "да-нет" с первым входом четвертого переключателя без самовозврата типа "или-или". Второй вход четвертого переключателя соединен с выходом четвертого суммирующего усилителя.
На первый и второй входы четвертого суммирующего усилителя подключены датчик вертикальной перегрузки и задатчик вертикальной перегрузки Nу соответственно. Третий вход четвертого переключателя типа "или-или" соединен через ограничитель сигнала по углу тангажа с выходом пятого суммирующего усилителя, к первому и второму входам которого подключены датчик угла тангажа и задатчик угла тангажа соответственно. Вход второго переключателя без самовозврата типа "да-нет" соединен с датчиком угла крена, а выход соединен с входами третьего и четвертого ограничителей сигналов по каналам элеронов и руля направления, выходы которых подключены соответственно ко вторым входам второго и первого суммирующих усилителей каналов элеронов и руля направления.
Выход четвертого безвозвратного переключателя типа "или-или" через ограничитель сигнала рассогласования по тангажу соединен со вторым входом третьего суммирующего усилителя канала руля высоты, при этом управляющие входы первого, второго переключателей без самовозврата типа "да-нет", первого, второго и третьего безвозвратных переключателей типа "или-или" соединены с выходом блока выработки команд управления блоком логики анализатора для исполнения команд.
Такое выполнение заявляемого устройства позволяет при минимальной потере высоты за счет непрерывной работы системы автоматического управления в замкнутом контуре повысить надежность вывода самолета из режимов штопора в режим штатного полета, обеспечить устойчивую работу системы управления на всех режимах полета, в том числе и на углах атаки, превышающих закритические значения, и повысить безопасность полетов.
Перечень фигур на чертежах.
Изобретение поясняется фигурами 1, 2, 3, 4, 5.
На Фиг.1 представлена блок-схема устройства, где обозначены:
1. Блок демпфирования по трем осям X/Y/Z;
2. Блок логики;
3. Анализатор режима полета;
4. Блок информационных датчиков;
5. ДУС рыскания;
6. ДУС крена;
7. ДУС тангажа;
8. Датчик вертикальной перегрузки;
9. Датчик угла атаки;
10. Датчик угла тангажа:
11. Датчик угла крена;
12. Датчик скоростного напора;
13. Задатчик угла тангажа;
14. Задатчик вертикальной перегрузки;
15. Первый безвозвратный переключатель типа "или-или" привода руля направления;
16. Второй безвозвратный переключатель типа "или-или" привода элеронов;
17. Первый суммирующий усилитель канала руля направления;
18. Второй суммирующий усилитель канала элеронов;
19. Третий суммирующий усилитель канала руля высоты;
20. Третий ограничитель сигнала по крену канала элеронов;
21. Четвертый ограничитель сигнала по каналу руля направлена;
22. Второй ограничитель сигнала рассогласования по тангажу;
23. Второй переключатель без самовозврата типа "да-нет" по крену;
24. Первый ограничитель сигнала по углу тангажа;
25. Четвертый переключатель сигналов типа "или-или";
26. Пятый суммирующий усилитель канала тангажа;
27. Усилитель привода руля направления штатной системы;
28. Усилитель привода элеронов штатной системы;
29. Устройство сравнения типа "да-нет" заданного и текущего значений скоростного напора;
30. Четвертый суммирующий усилитель текущих и заданных значений вертикальной перегрузки;
31. Вычислитель угловой скорости рыскания;
32. Фильтр высоких частот;
33. Блок абсолютной величины сигнала;
34. Блок выработки команд управления блоком логики;
35. Третий безвозвратный переключатель типа "или-или" привода руля высоты;
36. Усилитель привода руля высоты штатной системы;
37. 3адатчик скоростного напора;
38. Рулевой привод руля направления;
39. Рулевой привод элеронов;
40. Рулевой привод руля высоты;
41. Первый переключатель без самовозврата типа "да-нет".
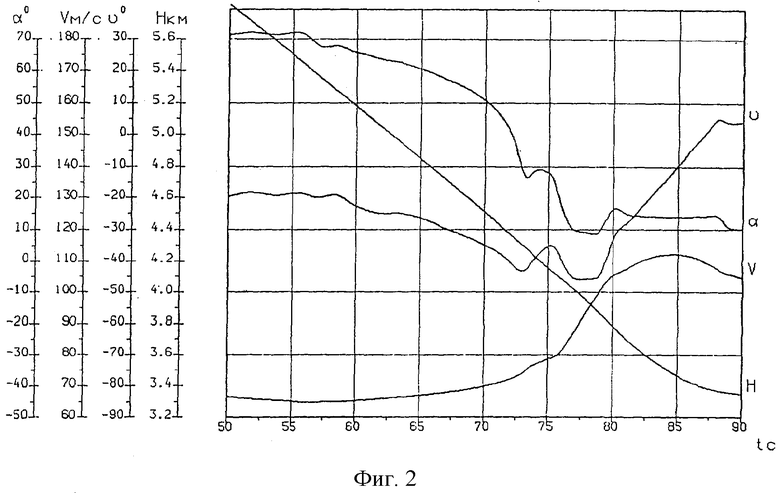
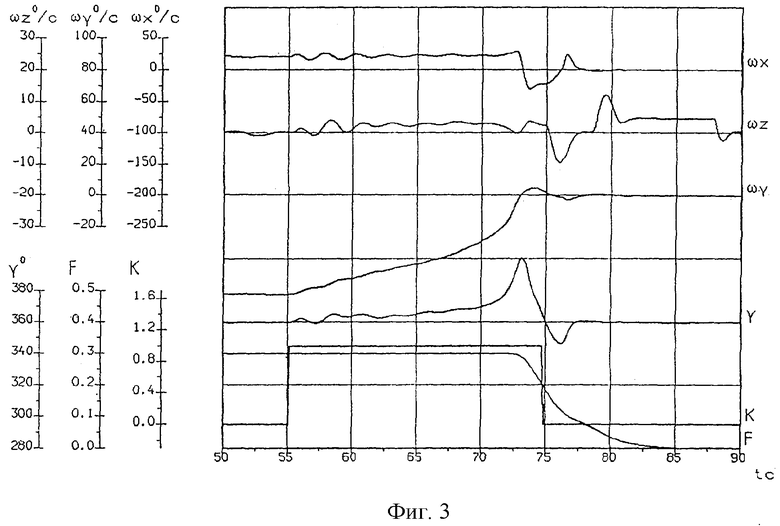
На Фиг.2, 3 показаны результаты математического моделирования процесса автоматического вывода самолета в штатный режим полета заявляемым устройством, включенным на вывод из плоского штопора по команде анализатора на 55 с.
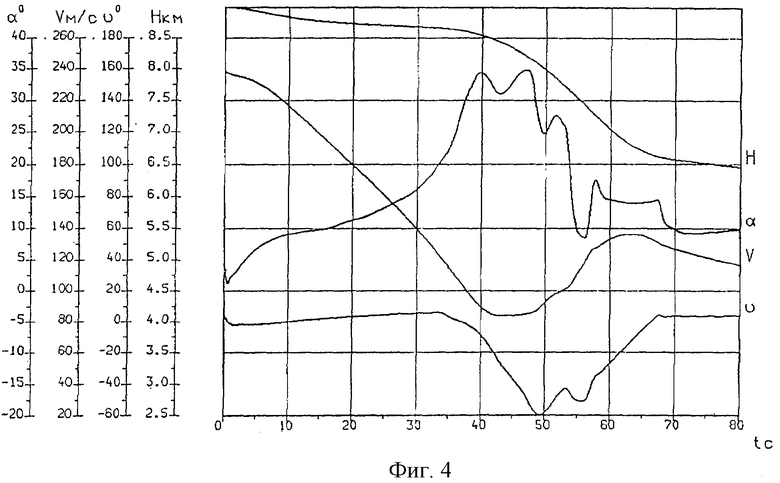
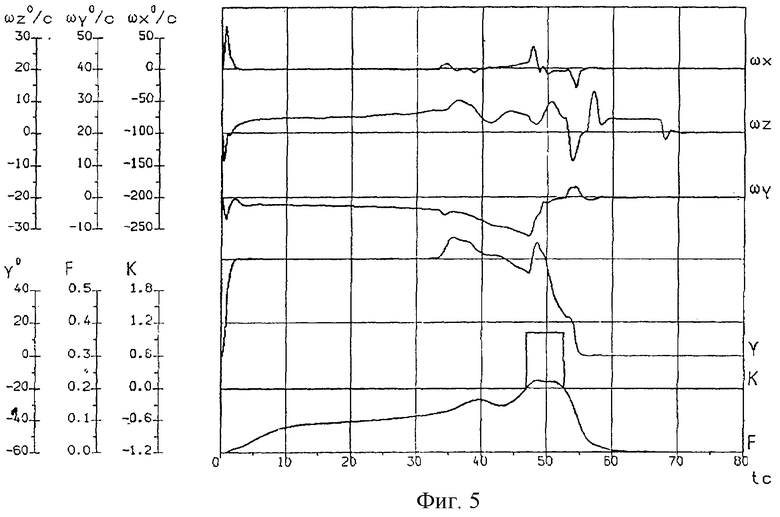
На фиг.4, 5 показан процесс автоматического приведения самолета в штатный режим полета при сваливании на торможении с γзад=60°, при этом на Фиг.2, 3, 4, 5 обозначено:
К - команда с анализатора;
F - сигнал с выхода фильтра;
Н - высота полета;
V - скорость полета;
α - угол атаки;
υ - угол тангажа;
γ - угол крена;
γ ωх, ωy, ωz - угловые скорости крена, рыскания и тангажа.
Сведения, подтверждающие возможность осуществления изобретения.
Устройство автоматического выведения самолета из режимов сваливания н штопора в штатный режим полета (см. фиг.1) содержит блок логики 2, анализатор режимов сваливания и штопора 3, блок информационных датчиков 4.
Согласно изобретению устройство выполнено связанным с блоком демпфирования самолета по трем осям координат X, Y, Z 1. Первый, второй, третий, четвертый и пятый входы которого соединены с выходами датчиков угловой скорости рыскания 5, угловых скоростей крена 6 и тангажа 7, расположенных по связанной с самолетом системе координат, углов атаки 9 и скоростного напора 12 блока информационных датчиков 4 соответственно. Первый, второй и третий выходы блока демпфирования соединены в блоке логики 2 с первыми входами первого, второго и третьего суммирующих усилителей каналов руля направления 17, элеронов 18, руля высоты 19 соответственно.
Анализатор режимов сваливания и штопора 3 выполнен из последовательно соединенных вычислителя угловой скорости рыскания 31, фильтра высоких частот 32, блока абсолютной величины сигнала 33, блока выработки команды управления 34 блоком логики.
При этом вычислитель угловой скорости рыскания 34 соединен с выходами датчиков угла тангажа 10, угла крена 11, угловой скорости рыскания 5, угловой скорости тангажа 7. Блок логики 2 содержит задатчики пороговых значений угла тангажа 13, вертикальной перегрузки Nyзад 14 и скоростного напора 37, ограничители сигналов по углам тангажа - первый 24 и второй 22, рыскания 20 и крена 21, суммирующие усилители 17, 18, 19, 30, 26.
Устройство сравнения типа "да-нет" заданного и текущего значения скоростного напора 29 первым входом соединено с датчиком скоростного напора 12, вторым входом - с задатчиком скоростного напора 37 и выходом соединенно через первый переключатель без самовозврата типа "да-нет" 41 с первым входом четвертого безвозвратного переключателя типа "или-или" 25, второй вход которого соединен с выходом четвертого суммирующего усилителя 30, на первый и второй входы четвертого суммирующего усилителя 30 подключены датчик вертикальной перегрузки 8 и задатчик вертикальной перегрузки Nу 14 соответственно.
Третий вход четвертого переключателя типа "или-или" 25 соединен через ограничитель сигнала по углу тангажа 24 с выходом пятого суммирующего усилителя 26, к первому и второму входам которого подключены датчик угла тангажа 10 и задатчик угла тангажа 13 соответственно.
Вход второго переключателя без самовозврата типа "да-нет" 23 соединен с датчиком угла крена 11, выход его соединен с входами третьего 20 и четвертого 21 ограничителей сигналов по каналам элеронов и руля направления соответственно.
Выход первого безвозвратного переключателя типа "или-или" 25 через ограничитель сигнала рассогласования по тангажу 22 соединен со вторым входом третьего суммирующего усилителя 19 канала руля высоты. Выходы первого 17, второго 18 и третьего 19 суммирующих усилителей соединены с первыми входами первого 15, второго 16 и третьего 35 безвозвратных переключателей типа "или-или", вторые входы которых подключены соответственно к усилителям приводов руля направления 27, элеронов 28 и руля высоты 36 штатной системы управления, выходы этих переключателей соединены с входами рулевых приводов руля направления 38, элеронов 39 и руля высоты 40.
При этом управляющие входы первого 41, второго 23 переключателей без самовозврата типа "да-нет", первого 15, второго 16 и третьего 35 безвозвратных переключателей типа "или-или" соединены с блоком выработки команд управления блоком логики 34.
Реализация вычислительных блоков анализатора режимов сваливания и штопора 3, блока демпфирования 1 и блока логики 2 в цифровом варианте не требует больших вычислительных ресурсов и не представляет трудности.
Такое выполнение заявляемого устройства позволят обеспечить автоматическое выведение самолета в штатный режим полета на этапе определения начала режима сваливания или штопора, в том числе на углах атаки, превышающих закритические значения.
Работа устройства
Работа устройства автоматического выведения самолета из режимов сваливания и штопора в штатный режим полета осуществляется последовательно в три этапа:
- определение начала режима сваливания или штопора;
- останов вращения самолета;
- вывод самолета в режим полета с углом траектории, близким к минимально возможному (по абсолютной величине).
Определение начала режима сваливания или штопора осуществляется путем анализа низкочастотной составляющей угловой скорости рыскания, определяемой в вычислителе (3) по формуле
 где
где
γ - угол крена,
ωy, ωz - угловые скорости рыскания и тангажа в связанной с самолетом системе координат,
ψ - угловая скорость рыскания.
Угловая скорость рыскания складывается из двух компонент, обусловленных движением вокруг центра масс самолета и движением его центра масс. В нормальных режимах полета частота этих движений различается более чем на порядок. В соответствии с этим амплитуда угловой скорости рыскания траекторной составляющей движения (движения центра масс) существенно меньше амплитуды, обусловленной движением вокруг центра масс.
При возникновении режима сваливания или штопора частота и амплитуда колебаний, обусловленных движением центра масс, существенно возрастают, что и является признаком появления указанных режимов. Введение фильтра высоких частот 32 в сигнал угловой скорости рыскания позволяет выделить составляющую, относящуюся к движению центра масс, и, оценив ее абсолютную величину, полученную в блоке 33, путем сравнения с некоторым пороговым значением в блоке 34 выработать команду на включение устройства, по которой переключатели 15, 16 и 35 отключают управляющие сигналы штатной системы 27, 28 и 36 от входов приводов органов управления 38, 39 и 40 и подключают к ним сигналы суммирующих усилителей 17, 18 и 19 устройства. Этой же командой посредством переключателя 41 сигнал с устройства сравнения 29 подключается к переключателю 25.
Выбор параметров высокочастотного фильтра и величины порогового значения сигнала, при которых происходит включение устройства, производится дня каждого типа самолета путем математического моделирования и подтверждается в летных испытаниях.
Алгоритм работы блока демпфирования 1 обеспечивает останов вращения самолета во всем диапазоне углов атаки путем выработки необходимых сигналов управления рулями направления, высоты и элеронами.
После останова вращения начинается режим перевода самолета в режим полета с траекторным углом, близким к траекторному углу при полете с максимальным аэродинамическим качеством.
При останове вращения сигнал на выходе блока абсолютной величины 34 анализатора становится меньше заданного порогового значения и анализатор выдает команду на включение стабилизации нулевого угла крена путем подключения переключателем 23 сигнала угла крена с датчика 11 к ограничителям сигнала 20 и 21 и заданного значения вертикальной перегрузки путем подключения сигнала рассогласования фактического и заданного значений перегрузки переключателем 25 к ограничителю сигнала 22, обеспечивающего увеличение траекторного угла полета самолета. В то же время происходит увеличение скорости полета и, соответственно, скоростного напора. При достижении заданного значения скоростного напора сигналы с устройства сравнения 29 переключателем 25 путем подключения сигнала рассогласования между заданным и фактическим углами тангажа через ограничитель сигнала 24 продольный канал переводится в режим стабилизации заданного значения угла тангажа, величина которого определяется установившимся режимом полета с углом атаки, несколько меньшим угла атаки, соответствующего максимальному значению аэродинамического качества.
Выбор величин параметров устройства производится для каждого типа самолета в соответствии с его характеристиками и конфигурацией путем математического моделирования и подтверждается летными испытаниями.
Работоспособность устройства подтверждается результатами математического моделирования движения самолета при сваливании и штопоре.
На Фиг. 2, 3 представлен пример переходного процесса параметров движения при автоматическом выводе самолета в штатный режим полета с помощью заявляемого устройства, когда устройство включено на вывод из штопора по команде анализатора на 55 с, а на Фиг. 4, 5 - при сваливании на торможении с γзад=60°.
Заявленное устройство обладает повышенной надежностью, позволяет при минимальной потере высоты обеспечить устойчивую работу системы управления на всех режимах полета, в том числе и на углах атаки, превышающих закритические значения.
В устройстве используются существующие серийно выпускаемые датчики угловых скоростей 5, 6, 7, углов 9, 10, 11, перегрузки 8 и скоростного напора 12. Реализация вычислительных блоков анализатора режима полета 3, блока демпфирования 1 и блока логики 2 в цифровом варианте не требует больших вычислительных ресурсов и не представляет трудности.
Литература
1. Динамика штопора самолета. Котик Н.Г. - М.: Машиностроение, 1976, с.242.
2. Динамика продольного и бокового движения. Бюшгенс Г.С., Студнев Р.В. - М.: Машиностроение, 1979, с.326-343.
3. Патент РФ №601892, В 64 С 13/18, 30.01.94 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| ДЕМПФЕР РЫСКАНИЯ САМОЛЕТА | 1999 |
|
RU2194650C2 |
Изобретение относится к авиационной технике. В состав устройства входит блок информационных датчиков угловых скоростей рыскания, крена и тангажа, а также датчиков вертикальной перегрузки, углов атаки, крена, тангажа и скоростного напора. Кроме того, имеются анализатор режимов полета, блок логики, приводы руля направления, элеронов и руля высоты и блок демпфирования самолета, обеспечивающий остановку вращения самолета во всем диапазоне углов атаки. Блок логики содержит задатчики пороговых значений угла тангажа, вертикальной перегрузки и скоростного напора, ограничители сигналов по углу тангажа и рассогласования по тангажу для канала руля высоты, ограничитель сигналов крена для канала элеронов, ограничитель сигналов по каналу руля направления, устройство сравнения типа "да-нет" заданного и текущего значений скоростного напора, два переключателя без самовозврата типа "да-нет", четыре переключателя без самовозврата типа "или-или" и пять суммирующих усилителей. Предложенное устройство характеризуется повышенной надежностью и устойчивостью работы во всех режимах полета и обеспечивает улучшение управляемости на всех углах атаки. 5 ил.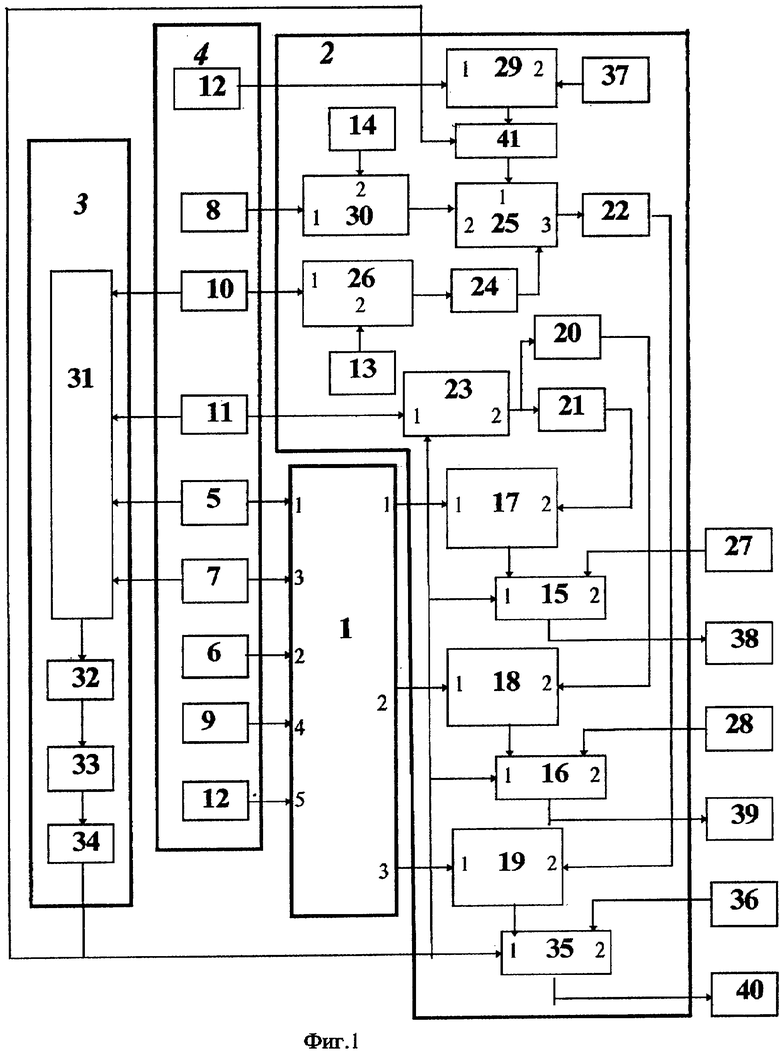
Устройство автоматического выведения самолета из режимов сваливания и штопора в штатный режим полета, содержащее блок информационных датчиков угловых скоростей рыскания, крена и тангажа, расположенных в связанной с самолетом системе координат, а также информационных датчиков вертикальной перегрузки, углов атаки, крена, тангажа и скоростного напора, анализатор режимов полета, блок логики, приводы руля направления, элеронов и руля высоты, отличающееся тем, что оно снабжено блоком демпфирования самолета, обеспечивающим остановку вращения самолета во всем диапазоне углов атаки, при этом первый, второй, третий, четвертый и пятый входы блока демпфирования самолета соединены с выходами датчиков угловой скорости рыскания, угловых скоростей крена и тангажа, углов атаки и скоростного напора соответственно, а первый, второй и третий выходы соединены в блоке логики с первыми входами первого, второго и третьего суммирующих усилителей каналов руля направления, элеронов, руля высоты соответственно, выходы первого, второго и третьего суммирующих усилителей соединены с первыми входами первого, второго и третьего безвозвратных переключателей типа "или-или", вторые входы которых подключены соответственно к усилителям приводов руля направления, элеронов и руля высоты штатной системы управления, выходы этих переключателей соединены с входами рулевых приводов руля направления, элеронов и руля высоты, анализатор режимов полета включает в себя последовательно соединенные вычислитель угловой скорости рыскания, фильтр высоких частот, блок абсолютной величины сигнала, блок выработки команды управления блоком логики, входы вычислителя угловой скорости рыскания (ψ) соединены с выходами датчиков угла тангажа, угла крена, угловой скорости крена, рыскания и тангажа (ωх, ωу, ωz), вертикальной перегрузки, а в блок логики включены задатчики пороговых значений угла тангажа, вертикальной перегрузки Nузад и скоростного напора, ограничители сигналов по углам тангажа и крена, устройство сравнения типа "да-нет" заданного и текущего значений скоростного напора, которое первым входом соединено с датчиком скоростного напора, вторым входом - с задатчиком скоростного напора, а выходом через первый переключатель без самовозврата типа "да-нет" - с первым входом четвертого переключателя без самовозврата типа "или-или", второй вход которого соединен с выходом четвертого суммирующего усилителя, к первому и второму входам четвертого суммирующего усилителя подключены датчик вертикальной перегрузки и задатчик вертикальной перегрузки Nу соответственно, третий вход четвертого переключателя типа "или-или" соединен через ограничитель сигнала по углу тангажа с выходом пятого суммирующего усилителя, к первому и второму входам которого подключены датчик угла тангажа и задатчик угла тангажа соответственно, вход второго переключателя без самовозврата типа "да-нет" соединен с датчиком угла крена, а выход - с входами третьего и четвертого ограничителей сигналов по каналам элеронов и руля направления, выходы которых подключены соответственно ко вторым входам второго и первого суммирующих усилителей каналов элеронов и руля направления, выход четвертого безвозвратного переключателя типа "или-или" через ограничитель сигнала рассогласования по тангажу соединен со вторым входом третьего суммирующего усилителя канала руля высоты, управляющие входы первого, второго переключателей без самовозврата типа "да-нет", первого, второго и третьего безвозвратных переключателей типа "или-или" соединены с выходом блока выработки команд анализатора режимов полета.
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ САМОЛЕТА | 1976 |
|
SU601892A1 |
| Устройство для автоматизированного управления объектом | 1981 |
|
SU981943A1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| САМОЛЕТ | 1993 |
|
RU2087384C1 |

