Изобретение относится к приборостроительной промышленности и может быть использовано при разработке бортовых систем управления (БСАУ) летательными аппаратами (ЛА) с самолетной схемой в условиях больших ветровых возмущений и при координированных разворотах с большими углами крена.
К аналогам относятся системы автоматического управления [1, 2, 3] Каналы управления рысканием и креном в аналогах содержат элементы вычитания и суммирующие усилители, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на исполнительные устройства ЛА.
Недостатком аналогов является отсутствие средств решения вопросов расширения области полетов в условиях ветровых порывов, приводящих к достижению исполнительными устройствами аэродинамического управления (АДУ) тормозных шарнирных моментов.
Аналогам присущи также следующие недостатки. В системе управления [1] представлено формирование каналов бокового движения: рысканья и крена в отдельности в декомпозиционном плане и с перекрестной связью между ними для реализации координированного управления; перекрестная связь выполнена в виде цепей от сигнала руля направления в качестве формирования задающего воздействия на канал крена.
Недостатком такой реализации является побочная загрузка канала рысканья движения в нем, вызванным введением ЛА в крен.
К недостаткам следует отнести также отсутствие средств обеспечения координатной инвариантности по скольжению (углу скольжения β и его производным) при координированном развороте. Рассмотрены системы управления боковым движением ЛА по каналам крена и рысканья [2, 3] В [2] приведено также формирование закона управления, обеспечивающего равенство нулю угла скольжения β. В этой системе также возникает избыточная компонента сигнала управления в канале рысканья от разворота ЛА по крену, ослабляющая эффективность координированного управления и снижающая точностные характеристики короткопериодического и траекторного движения, что является существенными недостатками аналогов.
Наиболее близким по технической сущности решением является разработка САУ [4] Устройство содержит последовательно соединенные элемент вычитания канала крена, вычитающий и суммирующий входы которого являются соответственно входом задания устройства и входом обратной связи по углу крена устройства, и суммирующий усилитель канала крена, второй вход которого является входом обратной связи по угловой скорости крена устройства, последовательно соединенные элемент вычитания канала боковой перегрузки, вычитающий и суммирующий входы которого являются соответственно входом задания устройства и входом обратной связи устройства по боковой перегрузке, и суммирующий усилитель канала боковой перегрузки, второй вход которого является входом обратной связи по угловой скорости рысканья устройства.
Недостатком прототипа является также отсутствие средств расширения области бездефицитного управления основного канала рысканья при ветровых порывах, приводящих к достижению тормозных значений шарнирных моментов исполнительных приводов АДУ.
Целью изобретения является расширение функциональных возможностей устройства при дефиците АДУ.
Следствием решения этой проблемы явится расширение зоны полета по скорости и высоте.
Линеаризованные уравнения бокового движения ЛА по доминирующим компонентам, например, в соответствии с [5, 6] и с учетом воздействия ветрового порыва могут быть представлены системой дифференциальных уравнений в виде: =ωy+Zβ(β+βw) +
=ωy+Zβ(β+βw) +  cosθ·γ
cosθ·γ =M
=M +M
+M
 =M
=M +M
+M +M
+M (1)
(1) =ωx-tgθ·ωy
=ωx-tgθ·ωy
nz
 zβ(β+βw)+z
zβ(β+βw)+z +z
+z
Уравнение шарнирных моментов руля направления (РН) имеет вид:
Мш= Мшβ˙(β+βw)+Мwδн˙δн, (2) здесь θ угол тангажа, характеризующий как параметр продольного канала для бокового;
β, ωy, ωx,γ,nz координаты бокового движения ЛА: угол скольжения, угловая скорость рысканья, угловая скорость по крену, угол крена и боковая перегрузка, соответственно;
ρw возмущающий фактор ветровой порыв;
v скорость полета ЛА;
g ускорение свободного падения;
δн,δэ углы отклонения исполнительных органов в каналах рысканья и крена, соответственно;
Zβ,Мyωy,Myβ,Myδн,Мхωх,Mxωy
Мхβ, Мхδэ,Мшβ,Mшδн- динамические коэффициенты. Из системы (1) видно, что член  cosθ·γ определяет движение координат ЛА, обусловленное введением ЛА в крен, т.е. координированным управлением.
cosθ·γ определяет движение координат ЛА, обусловленное введением ЛА в крен, т.е. координированным управлением.
Из (1) также видно, что, рассматривая декомпозиционное движение относительно воздействия γ а также оценивая боковое движение с учетом допущения малости скольжения (β,  0), получим, что установившееся значение угловой скорости ωyγ от воздействия γ составит
0), получим, что установившееся значение угловой скорости ωyγ от воздействия γ составит  =
=  cosθ·γ (3)
cosθ·γ (3)
Сигналы управления в канале крена (элеронов) и рысканья (руля направления) формируются в виде
σкрo=aγ(γ-γk)+aωx˙ωx, (4)
σнo=anz(nzk-nz)+aωy(ωy+σk), где aγ,aωx,anz и awy соответствующие передаточные числа;
γk и nzk управляющие сигналы по крену и перегрузке, соответственно.
Этот процесс соответствует установлению сигнала ωy=ωyγ вызванного сигналов γ≠0.
В условиях многорежимного управления при наличии больших уровней командных сигналов γk,nzk и возмущающих факторов βw возникает дефицит управления, обусловленный достижением шарнирных моментов тормозного значения. Особенно остро это сказывается в рулевом приводе РН, который для ЛА самолетной схемы гораздо менее по эффективности элеронов и достаточно загруженный по конструктивному исполнению и воздействующим факторам. К конструктивным особенностям можно отнести, например, наличие воздушного тормоза (ВТ) у современных ЛА типа воздушно-космических самолетов (ВКС), выполненного технологически объединенно с рулем направления; раскрытие ВТ приводит к снижению возможностей РН, в частности, к уменьшению тормозных значений шарнирных моментов. Одним из средств расширения возможностей управления является задействование дополнительных ресурсных источников управления маневренных двигателей (МД) реактивной системы управления (РСУ) [7]
Однако такое непосредственное задействование МД также ограничено по собственному ресурсу МД и условиями их работы: длительностью, частотой включения, выдерживанием необходимых пауз. Указанные ограничения в таком решении определяют его большой недостаток и могут сделать неприемлемым, что требует разработки средств корректного управления МД.
Поставленная указанная ранее цель с разрешением факторов РСУ достигается следующим образом. В устройство, описанное ранее на основе прототипа, введен следующий состав.
Последовательно соединенные подключенный ко входу обратной связи по углу крена устройства блок формирования синусной функции, первый усилитель и первый умножитель, последовательно соединенные подключенный ко входу обратной связи по тангажу устройства блок формирования косинусной функции, делитель и второй усилитель, выход которого соединен со вторым входом первого умножителя, управляющий вход делителя соединен со входом по скорости полета устройства, выход первого умножителя соединен с третьим входом суммирующего усилителя канала боковой перегрузки, а также последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом суммирующего усилителя канала боковой перегрузки, формирователь сигнала управления маневренными реактивными двигателями, выход которого является выходом устройства по управлению реактивными двигателями, интегратор, нелинейный элемент с зоной нечувствительности, первый ограничитель и выходной элемент вычитания канала боковой перегрузки, второй вход которого соединен с выходом суммирующего усилителя канала боковой перегрузки, а выход является выходом устройства по управлению аэродинамическим приводом руля направления, последовательно соединенные блок формирования сигнала тангенсной функции, первый корректирующий функциональный преобразователь и третий усилитель, второй умножитель, второй ограничитель и выходной сумматор канала крена, второй вход которого соединен с выходом суммирующего усилителя канала крена, а выход является выходом устройства по управлению аэродинамическим приводом электронов, и последовательно соединенные масштабный усилитель, вход которого соединен со входом устройства по скорости полета, второй корректирующий функциональный преобразователь и третий умножитель, второй вход которого соединен с выходом нелинейного элемента с зоной нечувствительности, а выход со вторым входом второго умножителя.
Сопоставительный анализ с прототипом показывает, что заявленное устройство отличается от него введением и составом новых каналов и общих звеньев. Таким образом, заявляемое устройство соответствует критерию изобретения "новизна".
В устройстве сформирована дополнительная компонента сигнала управления каналом рысканья σk, учитывающая компенсацию доминирующего сигнала ωyγ по (3) и компенсацию возникновения  от угла γ или γk, т.е. сформирован канал c σк
от угла γ или γk, т.е. сформирован канал c σк cosθ·sinγ·Kк (5) где сигнал sinγ определяет полную проекцию подъемной силы на горизонтальную плоскость [5] (линеаризацию синусной функции определяет угловое приращение γ ); Кк коэффициент, определяющий степень усиления сигнала γ для компенсации ωyγ и достижения Inv β
cosθ·sinγ·Kк (5) где сигнал sinγ определяет полную проекцию подъемной силы на горизонтальную плоскость [5] (линеаризацию синусной функции определяет угловое приращение γ ); Кк коэффициент, определяющий степень усиления сигнала γ для компенсации ωyγ и достижения Inv β  Так, при Кк=1, получим сигнал, компенсирующий компоненту (3) с точностью до динамики и установившегося отклонения. Формируется сигнал с усилением для синхронизации сигналов σk и ωyγ т.е. с учетом отличия от установившегося состояния по (4) и для достижения технически потребной инвариантности.
Так, при Кк=1, получим сигнал, компенсирующий компоненту (3) с точностью до динамики и установившегося отклонения. Формируется сигнал с усилением для синхронизации сигналов σk и ωyγ т.е. с учетом отличия от установившегося состояния по (4) и для достижения технически потребной инвариантности.
Прямой канал РСУ: инвертирующий усилитель-формирователь сигнала управления выбора МД введен по аналогии с известными решениями, например, по [7]
Однако такое решение, как было отмечено ранее, имеет ограниченное применение, ибо постоянное задействование МД РСУ недопустимо. Разработанные и введенные дополнительные каналы направлены на гибкое, комфортабельное и строго дозированное применение МД РСУ наряду с АДУ с одновременным удовлетворением противоречивых требований ограниченного включения МД и эффективности РСУ. Действительно, интегральный канал формирует интегральный сигнал наработки двигателей РСУ и передачи интегральной компоненты с РСУ на АДУ, в свою очередь эта передача формируется для двух каналов АДУ: через РН и через элероны. При ограниченных возможностях РН (малый тормозной момент) интегральная компонента РСУ передается только на элероны и по динамике задействования элеронов тем больше, чем меньше возможностей у РН. Контроль М по (2) с учетом знания, что имеет место большее значение первой компоненты (2) по β требует минимизации угла β что особенно важно в трансзвуковой области полета (числа Маха соответствуют М 0,9÷1,15), где особо выражены экстремумы и смена полярности (знакопеременных) динамических коэффициентов ЛА что важно и для динамики процессов. Знак и уровень отклонения элеронов выбраны в связи с изложенным с точки зрения минимизации β. Анализ системы уравнений (1) показал с принятой точки зрения зависимость требуемого отклонения элеронов от величины tgθ также нашедшую отражение в сформированном техническом решении.
0,9÷1,15), где особо выражены экстремумы и смена полярности (знакопеременных) динамических коэффициентов ЛА что важно и для динамики процессов. Знак и уровень отклонения элеронов выбраны в связи с изложенным с точки зрения минимизации β. Анализ системы уравнений (1) показал с принятой точки зрения зависимость требуемого отклонения элеронов от величины tgθ также нашедшую отражение в сформированном техническом решении.
Действительно, рассмотрим систему (1) для установившегося состояния с точки зрения введенного критерия минимизации β для условий задействования РСУ в канале РН с введением перекрестной интегральной компоненты РСУ в каналы РН и элеронов. Для исследования в этих условиях корректно принять отклонение рулевых органов АДУ равными сигналам, т.е.
δэ=σкр,
δн= σн, а также положив, что σн это непосредственно интегральный сигнал от РСУ, а σкр положим как зависимый от σн, т.е.
σкр=Кф˙σн, где Кф функциональный коэффициент.
В предполагаемом анализе рассматривается таким образом в качестве возмущения сигнал σн, а доминирующая выходная координата βуст. Таким образом в оценках вынужденного движения система (1) принимает вид
ωy+zβ·β+  cosθ·γ=0
cosθ·γ=0
-Мyωy ˙ωy-Myβ˙β=Myδн ˙δн (6)
-Мxωy ˙ωy-Mxωx ˙ωx-Mxβ˙β=Myδэ˙Кф˙δн,
-tgθ˙ωy+ωx= 0. Так как ωx=tgθ˙ωy и учтя, что 2-е и 3-е уравнения определят ωy и β а 3-е γ рассматриваем 2-е и 3-е уравнения:
-Мyωy ωy-Myβ˙β=Myδн ˙σн
-(Мхωх tgθ+Mxωy )ωy-Mxβ˙β= Mxδэ ˙Кф˙σн (7)
Из (7) вспомогательный определитель по β равен: Δβ 
 · σн (8)
· σн (8)
Δβ=0 при
-Myωy Mxδэ Kф+Myδн Mxωx tgθ+Myδн Mxωy0.
(9)
Следовательно Kф
 tgθ (10) Из (10) следует явная зависимость Кф и signКф от θ. Для анализа и синтеза коэффициента Кф выражение (10) преобразует к виду с разделением характерных членов по эффективности и демпфированию: Kф
tgθ (10) Из (10) следует явная зависимость Кф и signКф от θ. Для анализа и синтеза коэффициента Кф выражение (10) преобразует к виду с разделением характерных членов по эффективности и демпфированию: Kф tgθ +
tgθ +  (11)
(11)
Благодаря такому разделению видна достаточность в явном виде зависимости Кф от tgθ и можно пояснить достаточность такой реализации с грубостью к скоростному напору и скорости в числах Маха, что важно с точки зрения минимума реализационных средств на борту ЛА. Действительно, в соответствии, например, с [6] и [5] динамические коэффициенты объекта прямо пропорциональны соответствующим производным аэродинамических коэффициентов и обратно пропорциональны скоростному напору, т.е. в доминирующем плане Kф tgθ +
tgθ +  (12) где mij(M) производные i-х аэродинамических моментов по j-м параметрам.
(12) где mij(M) производные i-х аэродинамических моментов по j-м параметрам.
При этом исходя из достаточной коррелированности сходственных коэффициентов:
эффективностей myδн и mxδэ
и демпфирования mxωxmyωy и mxωy можно получить достаточно удобные для ограниченных возможностей реализации соотношения, положив: K1
K1 K2 (13)
K2 (13) K3 тогда Кф= К1(К2tgθ+К3)=К1К2tgθ +К1К3=Аtgθ+B (14) где А=К1К2, В=К1К3.
K3 тогда Кф= К1(К2tgθ+К3)=К1К2tgθ +К1К3=Аtgθ+B (14) где А=К1К2, В=К1К3.
Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежной областей техники и, следовательно, соответствуют критерию "существенные отличия".
Изобретение поясняется фиг. 1-5.
На фиг. 1 представлена блок-схема устройства в составе системы управления боковым движением ЛА, т.е. объектом, исполнительными устройствами и датчиками информации, обведенными пунктиром справа. Устройство имеет следующий состав: элемент вычитания канала крена 1, суммирующий усилитель канала крена 2, элемент вычитания канала боковой перегрузки 3, суммирующий усилитель канала боковой перегрузки 4, блок формирования синусной функции 5, первый усилитель 6, первый умножитель 7, блок формирования косинусной функции 8, делитель 9, второй усилитель 10, блок формирования сигнала тангенсной функции 11, первый корректирующий функциональный преобразователь 12, третий усилитель 13, второй умножитель 14, второй ограничитель 15, выходной сумматор канала крена 16, масштабный усилитель 17, второй корректирующий функциональный преобразователь 18, третий умножитель 19, инвертирующий усилитель 20, формирователь сигнала управления маневренными реактивными двигателями 21, интегратор 22, нелинейный элемент с зоной нечувствительности 23, первый ограничитель 24, суммирующий усилитель канала боковой перегрузки 25.
Состав управляемого объекта следующий: аэродинамический привод элеронов 26, аэродинамический привод РН 27, блок реактивных двигателей 28, собственно объект как динамическое звено 29, датчик угла крена 30, датчик угловой скорости по крену 31, датчик боковой перегрузки 32, датчик угловой скорости рысканья 33, датчик угла тангажа 34, датчик скорости полета 35. На блок-схеме фиг. 1 обозначено: ωx измеренный сигнал угловой скорости по крену, γk сигнал задающего командного воздействия по крену, γ- измеренный сигнал угла крена, σкрo,σкр сигналы управляющего воздействия канала крена, δэ отклонение элеронов, nzк сигнал задающего воздействия по боковой перегрузке, nz- измеренный сигнал боковой перегрузки, ωy- измеренный сигнал угловой скорости в канале рысканья, θ измеренный сигнал угла тангажа, v измеренный сигнал скорости полета, σнo, σн сигналы управляющего воздействия канала боковой перегрузки, σк компенсационная компонента сигнала управляющего воздействия, δн отклонение РН, Δγ рассогласование в канале крена, Δnz рассогласование в канале перегрузки, σнθ промежуточный сигнал по компоненте tgθ;σкри, σни интегральные компоненты сигналов в каналах крена и перегрузки, соответственно, Мy момент, создаваемый МД РСУ, U сигнал управления реактивными двигателями, М сигнал скорости полета в числах Маха; ±σ1;±σ2;±ρ1;±U1,±U N сигналы уставок, выставляемых непосредственно на соответствующих звеньях (15; 24; 23; 21); βw возмущение, действующее на ЛА (ветровой порыв); К(М) сигнал, соответствующий передаточному коэффициенту. Блоки 22 и 23 обведены пунктиром как составляющие интегрирующее устройство. На фиг. 2 представлен график зависимости Ny(U) блока 21 в виде многоступенчатой релейной характеристики, отражающей последовательность подключения маневренных реактивных двигателей по мере превышения по уровню сигнала управления соответствующих уставок Ui(N число двигателей с каждой из сторон ЛА, определяющий правый и левый разворот ЛА по рысканью).
На фиг. 3 представлена блок-схема реализации формирователя сигнала управления двигателями 21 с учетом характеристики по фиг. 2. Здесь обозначено: 36i релейные элементы с зоной нечувствительности Uiсоответственно; 37 сумматор.
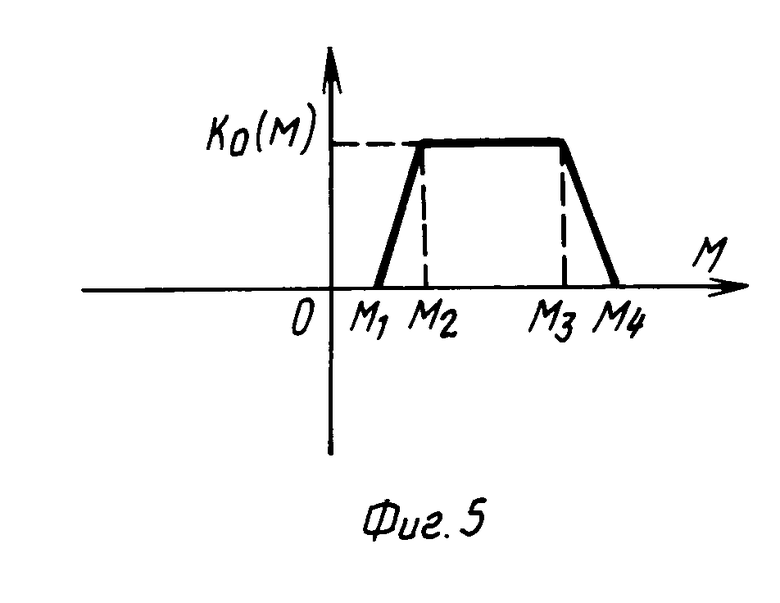
На фиг. 4 и 5 представлены примеры графиков кусочно-линейных зависимостей, реализуемых преобразователями 12 и 18.
Устройство работает следующим образом. Основные компоненты сигналов управления в каналах крена σкрo и перегрузки σнo формируются на основе измеренных сигналов γ, ωx,nz,ωy,θ датчиков 30-34, установленных на объекте 29, и задающих воздействий γк и nzк следующим образом. Элемент вычитания канала крена 1 выделяет рассогласование Δγ=γ-γк. Суммирующий усилитель канала крена 2 формирует сигнал σкр по первому уравнению (4). Передаточные коэффициенты a γ и a ωx выставляются в усилителе 2. Сигнал управления в канале рысканья σнo формируется по второму уравнению (4). Элемент вычитания 3 формирует рассогласование Δnz= nzк-nz, при этом в боковом движении значительного класса ЛА стабилизируются nzк=0, тогда Δnz= nz. Компонента сигнала σк формируется блоками: 5 формирует sinγ- 8 соs θ 9 формирует  , где v скорость полета, измеренная датчиком 35, 10 усиление сигнала
, где v скорость полета, измеренная датчиком 35, 10 усиление сигнала  с множителем g, 6 потребное усиление сигнала sinγ т.е. на его выходе имеем Кк˙sinγ 7 умножение сигналов Kк·sin
с множителем g, 6 потребное усиление сигнала sinγ т.е. на его выходе имеем Кк˙sinγ 7 умножение сигналов Kк·sin cosθ=σк На выходе усилителя 4 имеем сигнал σнo. Передаточные числа anz и aωyвыставляются в усилителе 4. Сигнал σкрo является основной компонентой сигнала управления аэродинамическим приводом в канале крена элеронами 26. Сигнал σнo является основной компонентой сигнала упpавления аэродинамическим приводом РН 27 и полным сигналом управления МД 28. Сигнал управления двигателями Ny формируется блоками 20 и 21. Инвертирующий усилитель 20определяет согласование по знаку разворотов ЛА от аэродинамического δн и реактивного Мy воздействий, ибо во 2-е уравнение системы (1) в правую часть добавлен член + εy, характеризующий ускорение от РСУ, соответствующее Мy, а член от АДУ (Myδн ˙δн) при положительном δн (и соответственно σн ) отрицателен, ибо, как было отмечено ранее, для ЛА Myδн <0; сигнал U с выхода блока 20 поступает на блок 21, с выхода которого сигнал Ny, формируемый, например, по зависимости фиг. 2 в реализации блоками 36 и 37 фиг. 3 поступал в виде дискретного уровня, соответствующего выборке+1, +2, +3,+N, -1, -2, -3, -N} непосредственно на включение соответствующих двигателей блока двигателей 28.
cosθ=σк На выходе усилителя 4 имеем сигнал σнo. Передаточные числа anz и aωyвыставляются в усилителе 4. Сигнал σкрo является основной компонентой сигнала управления аэродинамическим приводом в канале крена элеронами 26. Сигнал σнo является основной компонентой сигнала упpавления аэродинамическим приводом РН 27 и полным сигналом управления МД 28. Сигнал управления двигателями Ny формируется блоками 20 и 21. Инвертирующий усилитель 20определяет согласование по знаку разворотов ЛА от аэродинамического δн и реактивного Мy воздействий, ибо во 2-е уравнение системы (1) в правую часть добавлен член + εy, характеризующий ускорение от РСУ, соответствующее Мy, а член от АДУ (Myδн ˙δн) при положительном δн (и соответственно σн ) отрицателен, ибо, как было отмечено ранее, для ЛА Myδн <0; сигнал U с выхода блока 20 поступает на блок 21, с выхода которого сигнал Ny, формируемый, например, по зависимости фиг. 2 в реализации блоками 36 и 37 фиг. 3 поступал в виде дискретного уровня, соответствующего выборке+1, +2, +3,+N, -1, -2, -3, -N} непосредственно на включение соответствующих двигателей блока двигателей 28.
Одновременно сигнал Ny подается на интегратор 22, с выхода которого интегральный сигнал подается на звено с зоной нечувствительности 23. Интегральный канал корректирует работу канала РСУ, контролируя и оптимизируя ее. В качестве дополнительной ссылки в части намечающейся задачи этой оптимизации можно указать [8] где говорится об оптимальности процесса с точки зрения расхода рабочего тела с указанием допустимости одностороннего колебательного цикла, определяющего компенсацию возмущения fw (в виде момента Mв), т.е. по [8]  M
M dt
dt  M
M dt (15)
dt (15)
Однако эффективным задействование двигателей РСУ в комбинации с АДУ целесообразно считать при отработке достаточно больших сигналов, в связи с чем экономия топлива и ресурса по наработке самих двигателей становится дополнительной актуальной задачей.
Основным решением поставленной в изобретении цели является передача интегральной "переработки" двигателей РСУ на органы АДУ. Это осуществляется интегрирующим устройством интегратором 22 и звеном с зоной нечувствительности 23. При превышении интегрального сигнала ∫Nydt Nydt по уровню зоны ρ1 разностный сигнал σн подается в каналы элеронов и РН АДУ. В канал РН он подается непосредственно с предварительным ограничением на ограничителе 24 с уровнем ограничения ±σ2, соответствующего эффективности одного-двух УД с тем, чтобы не ограничивать задействование РСУ, а компенсировать остаточные колебательные циклы. В суммирующем усилителе канала боковой перегрузки 25 формируется выходной сигнал этого канала
σн=σнo-σни, (16) где σни сигнал с выхода ограничителя 24. Знак минус отражает повторное инвертирование сигнала РСУ для согласования с сигналом σнo. Выходной сигнал АДУ РН σн подается на рулевой привод РН 27 и отрабатывается РН отклоняется на угол δн, вследствие чего регулируется процесс бокового движения ЛА 29.
Интегральная компонента РСУ σи подается также в канал крена для формирования и в нем компоненты управления σкри как параллельное воздействие к РН, так и только управление элеронами при полной загрузке РН. Эта компонента формируется, как было отмечено ранее, с точки зрения уменьшения угла скольжения β и боковой перегрузки в особенной зоне полета, где остро меняются динамические характеристики ЛА например, в трансзвуковой (М=0,9-1,15). Эта зона формируется звеньями 17 и 18. С выхода масштабного усилителя 17 снимается сигнал, соответствующий скорости полета в числах Маха М=  где v скорость полета, измеряемая датчиком 35, аср средняя величина скорости звука в области полета (варьирование скорости звука невелико, и может быть учтено при формировании характеристики блока 18 некоторым снижением коэффициента этого блока). Сигнал М поступает на преобразователь 18, характеристика которого (фиг. 5) отражает зону передачи σи на элероны: М2-М3 активный участок передачи; М1-М2 и М3-М4 участки сопряжения. С преобразователя 18 сигнал К(М) соответствует передаточному коэффициенту Ко(М) для сигнала σи: на умножителе 19 умножаются сигналы К(М) и σи с блоков 18 и 23, соответственно. Блоки 11, 12 и 13 отвечают решению поставленной задачи с точки зрения формирования компоненты σкри в функции от tgθ в соответствии с (14): с выхода блока 11 снимается сигнал tgθ на преобразователе 12 формируется кусочно-линейная функция σиθ(tgθ)в соответствии с фиг. 4, при этом А и В параметры, соответствующие (14); усилитель 13 установлен для возможности повышения эффективности элеронов в зоне ослабления РН.
где v скорость полета, измеряемая датчиком 35, аср средняя величина скорости звука в области полета (варьирование скорости звука невелико, и может быть учтено при формировании характеристики блока 18 некоторым снижением коэффициента этого блока). Сигнал М поступает на преобразователь 18, характеристика которого (фиг. 5) отражает зону передачи σи на элероны: М2-М3 активный участок передачи; М1-М2 и М3-М4 участки сопряжения. С преобразователя 18 сигнал К(М) соответствует передаточному коэффициенту Ко(М) для сигнала σи: на умножителе 19 умножаются сигналы К(М) и σи с блоков 18 и 23, соответственно. Блоки 11, 12 и 13 отвечают решению поставленной задачи с точки зрения формирования компоненты σкри в функции от tgθ в соответствии с (14): с выхода блока 11 снимается сигнал tgθ на преобразователе 12 формируется кусочно-линейная функция σиθ(tgθ)в соответствии с фиг. 4, при этом А и В параметры, соответствующие (14); усилитель 13 установлен для возможности повышения эффективности элеронов в зоне ослабления РН.
На умножителе 14 сигналы каналов tgθ и К(М) умножаются. Сигнал с выхода умножителя 14 подается на ограничитель 15, уровень ограничения которого ±σ1, также, как и ±σ2 ограничителя 24, отвечает степени задействования элеронов по эквивалентности одному-двум двигателям РСУ.
Сигнал σкри с выхода ограничителя 15 подается на выходной сумматор канала крена 16, с выхода которого сигнал σкр=σкрo+ σкриподается на рулевой привод 26, отклоняющий элероны на угол δэ.
Предложенное построение устройства существенно расширяет функциональные возможности управления по высотноскоростному диапазону траекторий полета ЛА, решение позволяет осуществить корректное сочетание АДУ и РСУ с экономичным расходом топлива и ресурсом двигателей. В результате реализации предложения повышена статическая и динамическая точность. Достигаемый положительный эффект подтверждается теоретическим анализом, а также результатами моделирования на полной модели объекта, исполнительных устройств и сформированных законов управления.
Составные звенья устройства являются функционально-законченными блоками и могут быть реализованы в спец. вычислителе непосредственно по выполняемым функциям, а в аналоговом исполнении на современных элементах автоматики и вычислительной техники, например, по источникам [9, 10, 11] В частности, реализация умножителей и делителей по [9] блоков формирования сигналов тригонометрических функций по [10] корректирующих функциональных преобразователей по [12]
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
SU1840700A1 |
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| ДЕМПФЕР РЫСКАНИЯ САМОЛЕТА | 1999 |
|
RU2194650C2 |
| Способ формирования адаптивного сигнала управления боковым движением летательного аппарата | 2017 |
|
RU2650307C1 |
| Устройство управления боковым движением летательного аппарата | 1990 |
|
SU1751717A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |




Изобретение относится к приборостроительной промышленности и может быть использовано при разработке бортовых систем управления летательными аппаратами с самолетной схемой с режимами координированных разворотов с большими углами крена в условиях больших ветровых возмущений. Целью изобретения является расширение функциональных возможностей устройства при дефиците аэродинамического управления. Устройство имеет в своем составе основные каналы крена и боковой перегрузки. В каждом из этих каналов содержатся элемент вычитания и суммирующий усилитель. Эти звенья формируют сигналы управления для крена и боковой перегрузки. Новым в устройстве является введение блока формирования синусной функции, блока формирования косинусной функции, инвертирующего усилителя, формирователя сигнала управления маневренными реактивными двигателями, интегратора, нелинейного элемента с зоной нечувствительности, двух ограничителей, формирователя сигнала тангенсной функции, двух корректирующих функциональных преобразователей, трех усилителей, трех умножителей, выходного сумматора канала крена, масштабного усилителя, делителя. 5 ил.
УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее последовательно соединенные элемент вычитания канала крена, вычитающий и суммирующий входы которого являются соответственно входом задания устройства и входом обратной связи по углу крена устройства, и суммирующий усилитель канала крена, второй вход которого является входом обратной связи по угловой скорости крена устройства, последовательно соединенные элемент вычитания канала боковой перегрузки, вычитающий и суммирующий входы которого яляются соответственно входом задания устройства и входом обратной связи устройства по боковой перегрузке, и суммирующий усилитель канала боковой перегрузки, второй вход которого является входом обратной связи по угловой скорости рысканья устройства, отличающееся тем, что в него введены последовательно соединенные подключенный к входу обратной связи по углу крена устройства блок формирования синусной функции, первый усилитель и первый умножитель, последовательно соединенные подключенный к входу обратной связи по тангажу устройства блок формирования косинусной функции, делитель и второй усилитель, выход которого соединен с вторым входом первого умножителя, управляющий вход делителя соединен с входом по скорости полета устройства, выход первого умножителя соединен с третьим входом суммирующего усилителя канала боковой перегрузки, а также последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом суммирующего усилителя канала боковой перегрузки, формирователь сигнала управления маневренными реактивными двигателями, выход которого является выходом устройства по управлению реактивными двигателями, интегратор, нелинейный элемент с зоной нечувствительности, первый ограничитель и выходной элемент вычитания канала боковой перегрузки, второй вход которого соединен с выходом суммирующего усилителя канала боковой перегрузки, а выход является выходом устройства по управлению аэродинамическим приводом руля направления, последовательно соединенные блок формирования сигнала тангенсной функции, первый корректирующий функциональный преобразователь, третий усилитель, второй умножитель, второй ограничитель и выходной сумматор канала крена, второй вход которого соединен с выходом суммирующего усилителя канала крена, а выход является выходом устройства по управлению аэродинамическим приводом элеронов, и последовательно соединенные масштабный усилитель, вход которого соединен с входом устройства по скорости полета, второй корректирующий функциональный преобразователь и третий умножитель, второй вход которого соединен с выходом нелинейного элемента с зоной нечувствительности, а выход с вторым входом второго умножителя.
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Функциональные преобразователи информации | |||
| Л.: Энергоиздат, 1981. | |||
