Изобретение относится к радиотехнике, в частности к способам и устройствам поиска широкополосного сигнала, и может быть использовано в системах сотовой радиосвязи с кодовым разделением каналов (системах CDMA).
При приеме широкополосных сигналов выполняется процедура поиска, которая, как правило, представляет собой сканирование области неопределенности с обнаружением сигнала в каждой ее точке.
Известны различные способы и устройства поиска широкополосного сигнала, например, способ и устройство, описанные в патенте США №5.805.648 [1, патент США №5.805.648 "Method and apparatus for performing search acquisition in a CDMA communication system", Int. Cl. H 04 L 7/00]. Этот способ заключается в следующем. Проводят многократное сканирование области неопределенности. При сканировании в каждой точке области неопределенности (при каждом возможном дискретном значении временной задержки сигнала) выполняют перемножение принимаемого и опорного сигнала и когерентное накопление полученного произведения. Вычисляют модуль когерентно накопленного произведения. В аккумуляторе некогерентно накапливают модули когерентных накоплений полученных произведений. Результаты некогерентного накопления сравнивают с порогом. Если порог превышен, то соответствующая точка области неопределенности перепроверяется на следующем этапе поиска. На каждом этапе поиска может меняться число некогерентных накоплений и величина порога. На последнем этапе поиска принимают решение о величине задержки полезного сигнала.
Время поиска сигнала определяется числом точек области неопределенности (общим числом возможных дискретных значений временных задержек сигнала) и временем накопления в каждой точке. Поэтому время поиска может оказаться недопустимо большим. Существенно сократить время поиска можно, например, путем использования согласованной фильтрации.
Известны способ и устройство поиска с применением согласованного фильтра, которые описаны в [Справочник. Цифровые радиоприемные системы. Под ред. М.И.Жодзишского. М., Радио и связь. 1990, стр.105, рис.4.10]. В указанном способе входной сигнал поступает на аналого-цифровой квадратурный преобразователь, в котором этот сигнал преобразуют в синфазную и квадратурную составляющие на нулевой частоте. Каждая квадратурная составляющая сигнала поступает на цифровой согласованный фильтр. Выходные сигналы согласованных фильтров возводят в квадрат и суммируют. Результат суммирования поступает на вход блока выбора максимума и сравнения с порогом, в котором выбирают максимальное значение из полученных сумм квадратов и полученное максимальное значение сравнивают с порогом. Если порог превышен, то принимается решение об обнаружении сигнала.
Время накопления сигнала в согласованном фильтре ограничено нестабильностью опорных генераторов передатчика и приемника. Поэтому для обеспечения помехоустойчивости поиска сигнала после согласованной фильтрации выполняют некогерентное накопление сигнала.
Рассмотрим процедуру поиска в сотовых системах связи по стандарту третьего поколения 3GPPP, описанному в [Technical Specification 3GPPP TS 25.211 Physical channels and mapping of transport channels onto physical channels (FDD) (2001-12).]
Согласно этому стандарту с базовой станции на мобильную передаются ортогональные первичные и вторичные периодичные пилот последовательности. Длина первичной и вторичной пилот последовательностей равна длительности 256 чипов (длительность одного чипа равна 260 наносекундам), период следования этих последовательностей равен 2560 чипам (чип - элемент псевдослучайной последовательности).
На другие сигналы базовой станции накладывается скремблирующий код.
В стандарте 3GPP на мобильной станции применяется трехэтапная процедура поиска [Technical Specification 3GPPP TS 25.214 Physical layer procedures (FDD) (2001-12).].
На первом этапе поиска мобильная станция выполняет предварительную синхронизацию по первичной пилот последовательности. В стандарте рекомендуется выполнять первый этап поиска с помощью согласованного фильтра. При этом временное положение первичной пилот последовательности определяется на интервале периода ее следования. На втором этапе поиска мобильная станция выполняет более точную синхронизацию по вторичной пилот последовательности. На третьем этапе поиска мобильная станция определяет скремблирующий код [Technical Specification 3GPPP TS 25.211 Physical channels and mapping of transport channels onto physical channels (FDD) (2001-12)].
Наиболее близким техническим решением к заявляемому изобретению-способу поиска широкополосного сигнала и устройству для его реализации является изобретение, которое можно применить в системах связи стандарта 3GPPP [см. патент US#6.363.060 "Method and apparatus for fast WCDMA acquisition", H 04 J 13/00, Mar.26, 2002].
Способ поиска заключается в следующем:
Последовательно с периодом Т, равным периоду повторения пилот последовательности,
- N раз осуществляют последовательное суммирование значений синфазной и квадратурной составляющих входного сигнала, формируя, таким образом, последовательность синфазных и квадратурных сумм значений принимаемого сигнала.
- Выполняют согласованную фильтрацию последовательности синфазной и квадратурной сумм значений принимаемого сигнала, формируя последовательность комплексных значений корреляционной функции синфазной и квадратурной составляющих сигнала;
- Определяют модули последовательности комплексных значений корреляционной функции, формируя таким образом последовательность модулей корреляционной функции сигнала.
- Определяют максимальный модуль корреляционной функции сигнала.
- Принимают, что временная позиция максимального модуля определяет временную позицию полезного сигнала на интервале периода Т.
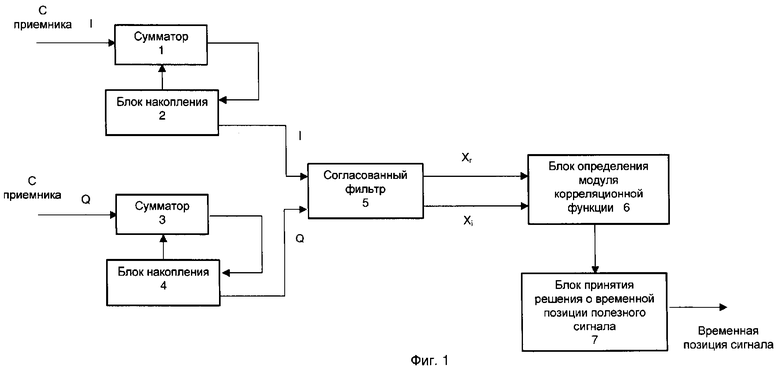
Для реализации такого способа используют устройство, представленное на фиг.1.
Устройство содержит первый и второй сумматоры 1 и 3 соответственно для синфазного и квадратурного каналов, первый и второй блоки накопления 2 и 4, также соответственно для синфазного и квадратурного каналов, согласованный фильтр 5, блок определения модуля 6 и блок принятия решения о задержке полезного сигнала 7. Первые входы первого и второго сумматоров 1 и 3 являются входами значений соответственно синфазной и квадратурной составляющих входного сигнала. Вторые входы первого и второго сумматоров 1 и 3 являются входами суммы значений принятых сигналов и соединены с первыми выходами блоков накопления 2 и 4. Выходы сумматоров 1 и 3 соединены соответственно с входами соответствующих блоков накопления 2 и 4. Вторые выходы первого и второго блоков накопления 2 и 4 соединены соответственно с первым и вторым входами согласованного фильтра 5, которые являются входами синфазной и квадратурной составляющих входного сигнала. Первый и второй выходы согласованного фильтра 5, которые являются соответственно выходами синфазной и квадратурной составляющих корреляционной функции принимаемого сигнала, соединены с первым и вторым входами блока определения модуля 6, выход которого является выходом значения модуля корреляционной функции принимаемого сигнала и соединен со входом блока принятия решения о временной позиции полезного сигнала 7. Выход блока принятия решения о задержке полезного сигнала 7 является выходом сигнала синхронизации.
Работает устройство поиска, реализующее способ прототип, следующим образом. Цифровые отсчеты синфазной и квадратурной составляющей принятого сигнала поступают на входы сумматоров 1 и 3. На вторые входы сумматоров 1 и 3 поступают отсчеты, записанные в соответствующих блоках накопления 2 и 4. В исходном состоянии в блоках накопления записаны нули. С периодом, равным периоду следования первичной пилот последовательности Т и шагом Δt, в блоках накопления 2 и 4 накапливают цифровые значения входного сигнала. Например, если период следования первичного синхросигнала равен 2560 чипов, а шаг дискретизации равен половине чипа, то устройство с периодом, равным 2560 чипов, накапливает в каждой из 5120 ячеек блоков накопления 2 и 4 сумму отсчетов входного сигнала. После завершения накопления сигнала отсчеты с выходов блоков накопления 2 и 4 поступают на вход согласованного фильтра 5. Модули выходных отсчетов согласованного фильтра 5 через блок определения модуля 6 поступают на блок принятия решения о временной позиции полезного сигнала 7. Принимают, что временная позиция максимального накопленного модуля определяет временную позицию полезного сигнала на периоде Т. Выходной сигнал блока принятия решения о временной позиции полезного сигнала 7, который определяет величину временной позиции полезного сигнала, поступает на выход устройства.
Начальную установку устройства поиска выполняется внешним контролером (на фиг.1 сигнал начальной установки не показан).
Недостатком способа и устройства прототипа является то, что для их реализации необходимо оперативное запоминающее устройство (ОЗУ), содержащее число ячеек, равное числу отсчетов сигнала на периоде повторения пилот последовательности. Это ОЗУ используется для накопления сигнала. Например, если период следования первичного синхросигнала равен 2560 чипов, а шаг дискретизации равен половине чипа, то устройство содержит 5120 ячеек памяти в каждом из блоков накопления (синфазном и квадратурном). Для мобильной станции характерны жесткие ограничения на программные и аппаратные ресурсы и поэтому ОЗУ указанной емкости могут оказаться недопустимо большими.
Задача, которую решает предлагаемое изобретение, заключается в уменьшении емкости ОЗУ, которое используется для накопления сигнала, и, следовательно, в упрощении мобильной станции.
Для решения этой задачи в способ поиска широкополосного сигнала, заключающийся в том, что последовательно с периодом Т, равным периоду повторения пилот последовательности, N раз выполняют согласованную фильтрацию синфазной и квадратурной составляющих принимаемого сигнала, каждый раз формируя последовательность комплексных значений корреляционной функции синфаиной и квадратурной составляющих принимаемого сигнала, определяют модули последовательности комплексных значений корреляционной функции, получая, таким образом, последовательность модулей корреляционной функции принимаемого сигнала,
дополнительно согласно изобретению введены следующие операции:
- для каждой из J первых последовательностей модулей корреляционных функций принимаемого сигнала выбирают и запоминают G максимальных модулей и их временные позиции,
- если временные позиции некоторых из G максимальных модулей текущей последовательности совпадают с временными позициями максимальных модулей какой-либо из предыдущих последовательностей, то соответствующие им модули накапливают,
- с (J+1)-ой по N-ую последовательность накапливают модули для временных позиций, запомненных ранее в первых J последовательностях, вместе с модулями, накопленными на этих временных позициях ранее в первых J последовательностях,
- определяют максимальное значение накопленных модулей, временная позиция максимального накопленного модуля определяет временную позицию полезного сигнала на интервале периода Т.
Для решения этой же задачи в устройство поиска широкополосного сигнала, содержащее согласованный фильтр, блок определения модуля корреляционной функции, блок накопления, причем первый и второй вход согласованного фильтра являются входами синфазной и квадратурной составляющих входного сигнала, первый и второй выходы согласованного фильтра, которые являются выходами последовательностей комплексных значений корреляционной функции синфазной и квадратурной составляющих принимаемого сигнала, соединены соответственно с первым и вторым входом блока определения модуля корреляционной функции,
дополнительно введены:
блок объединения, блок определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций, блок определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции, а блок накопления выполнен управляемым, причем выход блока определения модуля корреляционной функции, который является выходом последовательностей модулей корреляционной функции принимаемого сигнала, соединен с первым входом блока объединения и первым входом блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций, второй вход блока объединения объединен с первым входом блока определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции и соединен с выходом управляемого блока накопления, который является выходом записанных сумм модулей корреляционной функции, выход блока объединения является выходом суммы модулей корреляционной функции и соединен с первым входом управляемого блока накопления, первый выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций, который является выходом сигнала управления накоплением и определяет временной интервал накопления, соединен со вторым входом управляемого блока накопления, второй выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций, который является выходом сигнала управления записью модулей и определяет временной интервал записи, соединен с третьим входом управляемого блока накопления, третий выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций является выходом сигнала, определяющего адреса ячеек памяти, по которым записываются модули, и соединен с четвертым входом управляемого блока накопления, четвертый выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций является выходом сигнала, определяющего адрес ячеек памяти управляемого блока накопления, в которых накапливаются или с которых считываются модули корреляционной функции, соединен с пятым входом управляемого блока накопления, пятый выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций, который является выходом максимальных значений модулей каждой из J последовательностей, соединен с шестым входом управляемого блока накопления, а также с третьим входом блока объединения, шестой выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций, который является выходом сигнала управления выбором накапливаемого сигнала, соединен с четвертым входом блока объединения и четвертым входом блока определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции, седьмой выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций является выходом значений временных позиций накопленных модулей и соединен со вторым входом блока определения максимального значения модуля накопленного сигнала и его временной позиции, выход которого является выходом временной позиции сигнала и выходом устройства, седьмой вход управляемого блока накопления, третий вход блока определения максимального значения модуля накопленного сигнала и его временной позиции и второй вход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций являются выходами начальной установки.
Сопоставительный анализ способа поиска широкополосного сигнала и устройства для его реализации с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет значительно уменьшить емкость ОЗУ, которое используется для накопления сигнала.
Например, если период следования первичного синхросигнала равен 2560 чипов, а шаг дискретизации равен половине чипа, то устройство-прототип содержит 5120 ячеек памяти в каждом из блоков накопления. При использовании предлагаемого способа емкость памяти можно уменьшить более чем на порядок.
Графические материалы, используемые для иллюстрации предлагаемого решения:
Фиг.1 - структурная схема устройства поиска сигнала прототипа.
Фиг.2 - структурная схема предлагаемого устройства поиска сигнала.
Фиг.3 - вариант выполнения блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций.
Фиг.4 - вариант выполнения первого узла памяти.
Фиг.5 - вариант выполнения второго узла памяти.
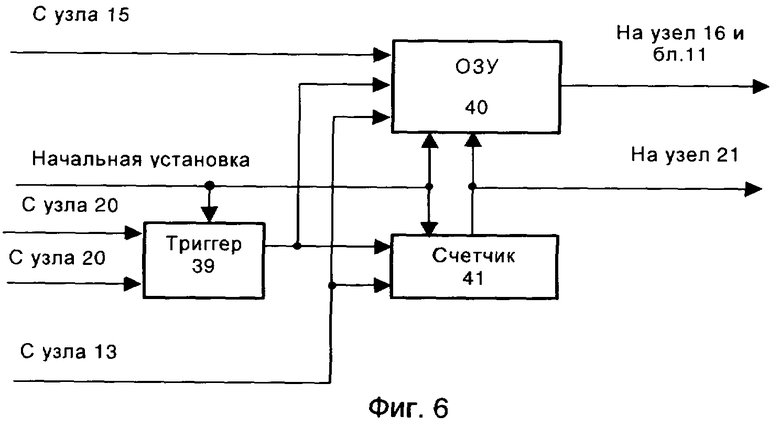
Фиг.6 - вариант выполнения третьего узла памяти.
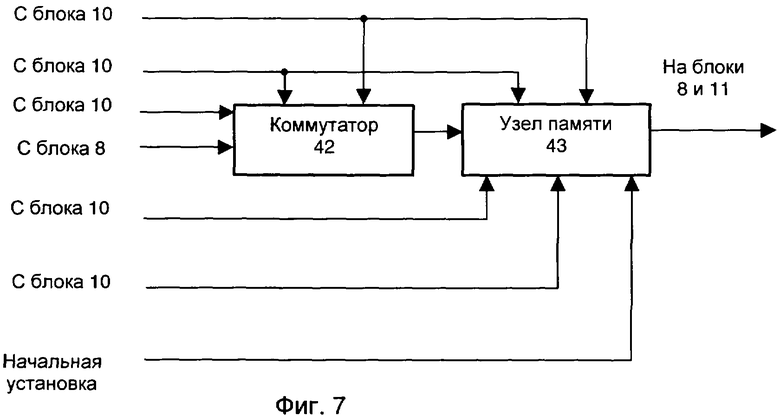
Фиг.7 - вариант выполнения управляемого блока накопления.
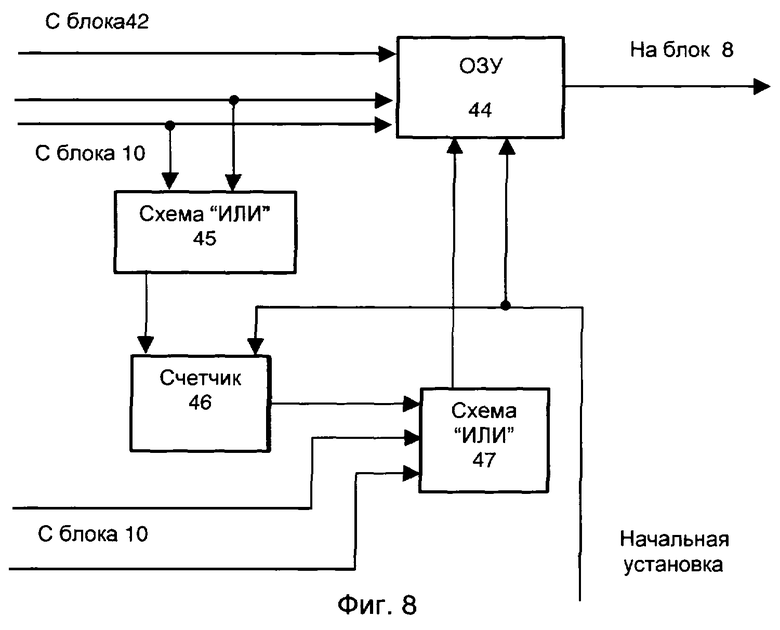
Фиг.8 - вариант выполнения узла памяти управляемого блока накопления.
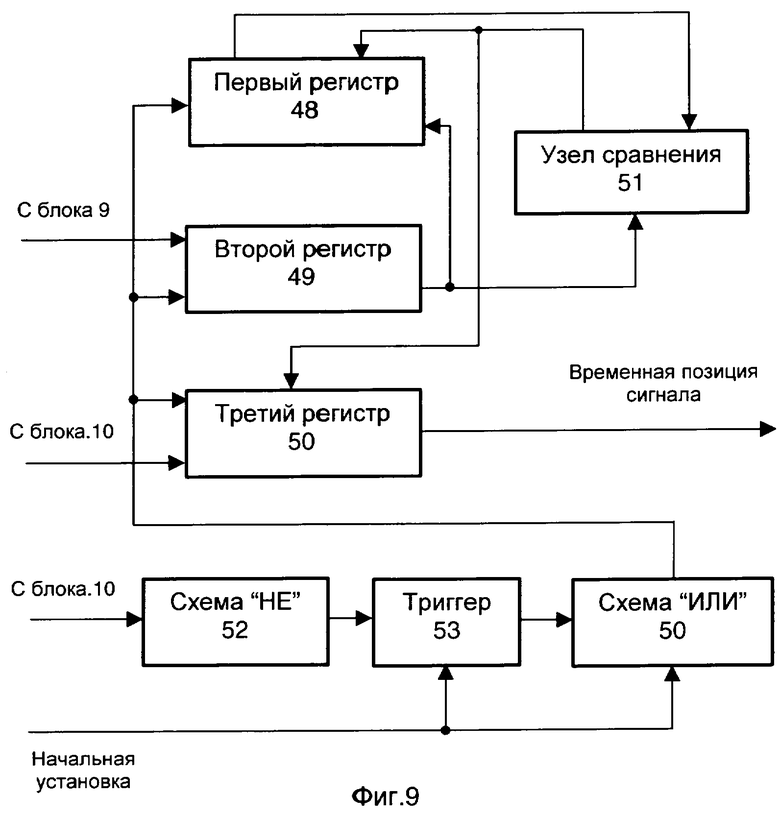
Фиг.9 - вариант выполнения блока определения максимального модуля накопленного сигнала и его временной позиции.
Предлагаемый способ поиска широкополосного сигнала заключается в следующем:
- Последовательно с периодом Т, равным периоду повторения пилот последовательности,
- N раз выполняют согласованную фильтрацию синфазной и квадратурной составляющих принимаемого сигнала, каждый раз формируя последовательность комплексных значений корреляционной функции синфазной и квадратурной составляющих принимаемого сигнала;
- определяют модули последовательности комплексных значений корреляционной функции, получая, таким образом, последовательность модулей корреляционной функции принимаемого сигнала.
- Для каждой из J первых последовательностей модулей корреляционных функций принимаемого сигнала выбирают и запоминают G максимальных модулей и их временные позиции.
- Если временные позиции некоторых из G максимальных модулей текущей последовательности совпадают с временными позициями максимальных модулей какой-либо из предыдущих последовательностей, то соответствующие им модули накапливают.
- С (J+1)-й по N-ю последовательность накапливают модули для временных позиций, запомненных ранее в первых J последовательностях, вместе с модулями, накопленными на этих временных позициях ранее (в первых J последовательностях).
- Определяют максимальное значение накопленных модулей.
Временная позиция максимального накопленного модуля определяет временную позицию полезного сигнала на интервале периода Т.
Для реализации предлагаемого способа используется устройство, схема которого показана на фиг.2.
Устройство содержит согласованный фильтр 5, блок определения модуля корреляционной функции 6, блок объединения 8, управляемый блок накопления 9, блок определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10, блок определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции 11. Причем первый и второй вход согласованного фильтра 5 являются входами синфазной и квадратурной составляющих входного сигнала. Первый и второй выходы согласованного фильтра 5, которые являются выходами последовательностей комплексных значений корреляционной функции синфазной и квадратурной составляющих принимаемого сигнала, соединены соответственно с первым и вторым входом блока определения модуля корреляционной функции 6. Выход блока определения модуля корреляционной функции 6, который является выходом последовательностей модулей корреляционной функции принимаемого сигнала, соединен с первым входом блока объединения 8 и первым входом блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. Второй вход блока объединения 8 объединен с первым входом блока определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции 11 и соединен с выходом управляемого блока накопления 9, который является выходом записанных сумм модулей корреляционной функции. Выход блока объединения 8 является выходом суммы модулей корреляционной функции и соединен с первым входом управляемого блока накопления 9.
Первый выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10, который является сигналом управления накоплением и определяет временной интервал накопления, соединен со вторым входом управляемого блока накопления 9.
Второй выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10, который является выходом сигнала управления записью модулей и определяет временной интервал записи, соединен с третьим входом управляемого блока накопления 9.
Третий выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 является выходом сигнала, определяющего адреса ячеек памяти, по которым записываются модули, и соединен с четвертым входом управляемого блока накопления 9..
Четвертый выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 является выходом сигнала, определяющего адрес ОЗУ, по которому накапливается или считывается модуль корреляционной функции, соединен с пятым входом управляемого блока накопления 9.
Пятый выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10, который является выходом максимальных значений модулей каждой из J последовательностей, соединены с шестым входом управляемого блока накопления 9, а также с третьим входом блока объединения 8.
Шестой выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10, который является выходом сигнала управления выбором накапливаемого сигнала, соединен с четвертым входом блока объединения 8 и четвертым входом блока определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции 11.
Седьмой выход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 является выходом значений временных позиций накопленных модулей и соединен со вторым входом блока определения максимального значения модуля накопленного сигнала и его временной позиции 11, выход которого является выходом временной позиции сигнала и выходом устройства.
Седьмой вход управляемого блока накопления 9, третий вход блока определения максимального значения модуля накопленного сигнала и его временной позиции 11 и второй вход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 являются выходами начальной установки.
Предлагаемое устройство поиска широкополосного сигнала работает следующим образом.
Цифровой сигнал с приемника поступает на вход согласованного фильтра 5, где последовательно, с периодом Т, равным периоду повторения пилот последовательности, N раз выполняется согласованная фильтрация синфазной и квадратурной составляющих принимаемого сигнала. В результате каждой процедуры согласованной фильтрации получается последовательность комплексных значений корреляционной функции синфазной и квадратурной составляющих принимаемого сигнала.
Синфазная и квадратурная составляющие выходного сигнала согласованного фильтра 5 поступают на входы блока определения модуля корреляционной функции 6. В этом блоке вычисляют модули значений выходного сигнала согласованного фильтра 5, т.е. вычисляют модули последовательности комплексных значений корреляционной функции, формируя таким образом последовательность модулей корреляционной функции принимаемого сигнала. Каждому периоду повторения пилот последовательности соответствует определенная последовательность модулей корреляционной функции принимаемого сигнала (элементы которой соответствуют временным позициям априорного интервала).
Последовательности модулей корреляционной функции принимаемого сигнала с блока определения модуля корреляционной функции 6 поступают на первый вход блока объединения 8 и первый вход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. В блоке определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 в каждой из первых J последовательностей модулей выбирают и запоминают G максимальных модулей и их временные позиции. Выбранные максимальные значения модулей каждой из J последовательностей с пятого выхода блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 поступают на шестой вход управляемого блок накопления 9, а также на третий вход блока объединения 8.
В блоке определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 G максимальных значений модулей каждой из J последовательностей упорядочены по величине модуля. В таком же порядке они записываются в управляемый блок накопления 9. Для записи G максимальных значений модулей в управляемый блок накопления 9 в блоке определения G максимальных значений последовательности модулей корреляционной функции и их задержек 10 формируется сигнал управления записью модулей, который определяет временной интервал записи. Этот сигнал поступает со второго выхода блока определения G максимальных значений последовательности модулей корреляционной функции и их задержек 10 на третий вход управляемого блока накопления 9. С третьего выхода блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 на четвертый вход управляемого блока накопления 9 поступает сигнал, определяющий адреса ячеек памяти, по которым записываются модули. При этом, если временные позиции некоторых из G максимальных модулей текущей последовательности совпадают с временными позициями максимальных модулей предыдущих последовательностей, то соответствующие им модули накапливают. Для этого с первого выхода блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 на второй вход управляемого блока накопления 9 поступают сигнал управления накоплением, который определяет временной интервал накопления, а с четвертого выхода блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 на пятый вход управляемого блока накопления 9 поступает сигнал, определяющий адрес ОЗУ, по которому накапливается модуль корреляционной функции.
Блок определения G максимальных значений последовательности модулей корреляционной функции и их задержек 10 формирует сигнал управления выбором накапливаемого сигнала, который с шестого выхода блока 10 поступает на четвертый вход блока объединения 8 (с 1 по J последовательность - модули с блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10; для последовательностей с J+1 по N-выходной сигнал блока определения модуля 6). На третий вход блока объединения 8 поступает модуль корреляционной функции, запомненный в блоке определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. На второй вход блока объединения 8 поступает сумма модулей корреляционной функции, записанная в управляемом блоке накопления 9 по заданному адресу. С выхода блока объединения 8 полученная сумма модулей корреляционной функции поступает на вход управляемого блока накопления 9 и записывается по заданному адресу.
С (J+1)-й по N-ю последовательность накапливают модули этих последовательностей для временных позиций, запомненных ранее в первых J последовательностях вместе с модулями, накопленными на этих временных позициях в первых J последовательностях. Для этого из блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 в управляемый блок накопления 9 поступают сигнал управления накоплением, который определяет временной интервал накопления, и сигнал, определяющий адреса ОЗУ, по которым накапливаются модули. Модули выходных сигналов согласованного фильтра 5 с выхода блока определения модуля корреляционной функции 6, поступают на первый вход блока объединения 8. На второй вход блока объединения 8 поступают суммы модулей корреляционной функции, записанные в управляемом блоке накопления 9 по заданным адресам. С выхода блока объединения 8 суммы модулей корреляционной функции поступают на вход управляемого блока накопления 9 и записываются по заданным адресам.
После получения N последовательностей модулей корреляционных функций принимаемого сигнала, в блоке определения максимального модуля накопленного сигнала и его временной позиции 11 определяют максимальный накопленный модуль. Для этого из управляемого блока накопления 9 на блок определения максимального значения модуля накопленного сигнала и его временной позиции 11 поступают накопленные модули, с блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 на блок определения максимального значения модуля накопленного сигнала и его временной позиции 11 поступают значения временных позиций накопленных модулей и сигнал управления выбором накапливаемого сигнала. Момент окончания сигнала управления выбором накапливаемого сигнала определяет момент окончания N последовательностей модулей корреляционных функций принимаемого сигнала. Поэтому определение максимального модуля накопленного сигнала и его временной позиции начинают после окончания сигнала управления выбором накапливаемого сигнала.
Принимают, что временная позиция максимального модуля накопленного сигнала определяет временную позицию полезного сигнала на интервале периода Т.
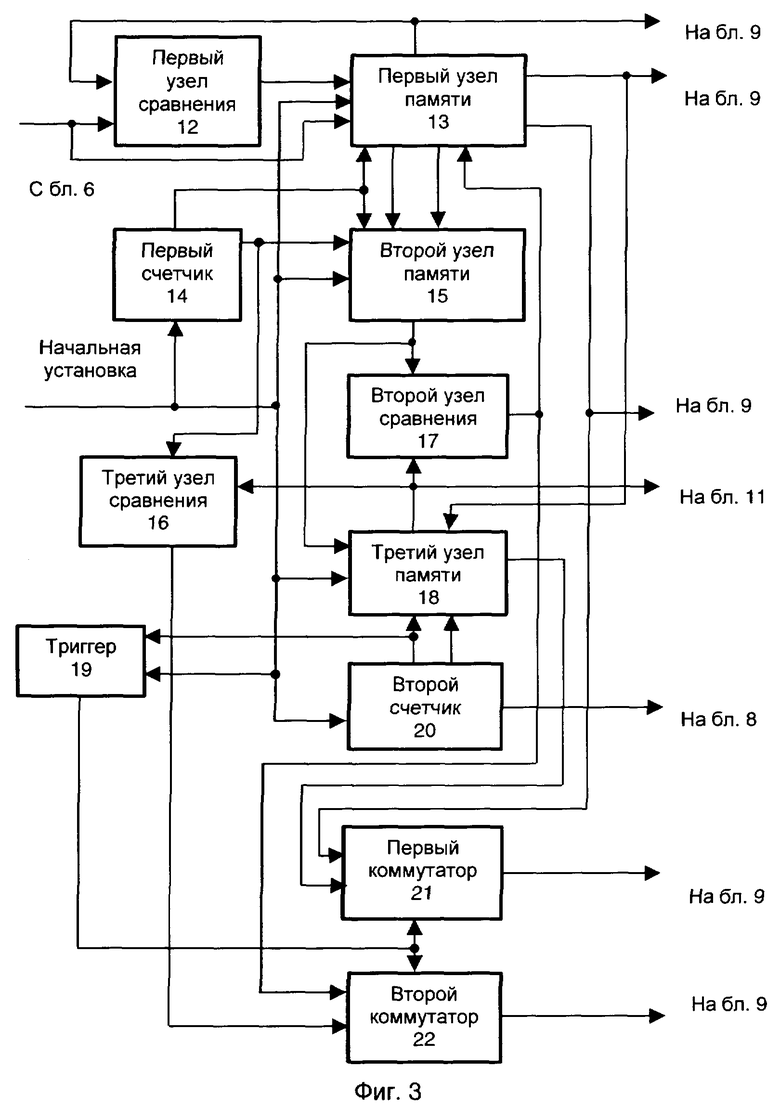
Вариант выполнения блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 приведен на фиг.3.
На вход блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 с блока определения модуля корреляционной функции 6. поступают последовательности модулей корреляционных функций принимаемого сигнала.
В первом узле памяти 13 запоминают G максимальных модулей каждой из J первых последовательностей модулей, а их временные позиции запоминают во втором узле памяти 15.
В исходном состоянии во все ячейки всех трех узлов памяти (13, 15, 18) записаны нули.
Выбор G максимальных модулей корреляционной функции выполняют путем сравнения в первом узле сравнения 12 модулей, поступающими на вход блока, с модулями, записанных в первом узле памяти 13. Если входной модуль меньше всех G модулей, записанных в первом узле памяти 13, то состав этих модулей не меняется. Если входной модуль больше модуля, записанного в первом узле памяти 13 по адресу Q, то адреса модулей с адреса Q по адрес G сдвигаются на единицу и по адресу Q записывается входной модуль. Сдвиг адресов представляет собой сдвиг на одну ячейку памяти всех модулей с адреса Q по адрес G.
Во второй узел памяти 15 записываются временные позиции G максимальных значений модулей корреляционной функции. Причем адрес ячейки второго узла памяти 15, в которую записана временная позиция модуля на периоде Т, равен адресу ячейки первого узла памяти 13, в которую записан сам модуль корреляционной функции.
Временные позиции G максимальных значений модулей корреляционной функции записываются во второй узел памяти 15 в нормированной к периоду дискретизации форме и формируются первым счетчиком 14.
Сортировка временных позиций во втором узле памяти 15 осуществляется одновременно с сортировкой соответствующих им модулей корреляционной функции в первом узле памяти 13. Для этого с первого 13 на второй узел памяти 15 поступает сигнал управления сдвигом временных позиций и адрес, с которого начинается сдвиг.
После окончания каждой из J последовательностей, первый счетчик 14 формирует сигнал конца последовательности, по которому максимальные значения каждой из J последовательностей модулей с первого узла памяти 13 поступают на выход блока, а временные позиции выбранных максимальных значений модулей каждой из J последовательностей из второго узла памяти 15 поступают на вход второго узла сравнения 17 и на вход третьего узла памяти 18, в котором записаны все предыдущие временные позиции.
Во втором узле сравнения 17 с каждой из G временных позиций, поступающих со второго узла памяти 15, сравнивают все ранее записанные в третьем узле памяти 18 временные позиции. Если какая-либо из G временных позиций совпадает с временной позицией, записанной в третьем узле памяти 18, то по сигналу второго узла сравнения 17 во втором коммутаторе 22 формируют сигнал управления накоплением, а первый узел памяти 13 формирует соответствующий адрес. Если временная позиция не совпадает ни с одной временной позицией записанной в третьем узле памяти 18, то первый узел памяти 13 формирует сигнал управлением записи и соответствующий адрес. Каждая из G временных позиций второго узла памяти 15, не совпадающая ни с одной временной позицией третьего узла памяти 18, по сигналу управлением записи, поступающего с первого узла памяти 13, перезаписывается из второго узла памяти 15 в третий узел памяти 18.
С (J+1)-й по N-ю последовательность в третьем узле сравнения 16 формируется сигнал управления накоплением для временных позиций, запомненных ранее в первых J последовательностях в третьем узле памяти 18. Для этого в третьем узле сравнения 16 выполняется сравнение текущей временной позиции и позиций запомненных в третьем узле памяти 18. С (J+1)-ой по (N+1)-ую последовательность третьим узлом памяти 18 формируется сигнал, определяющий адреса ячеек памяти управляемого блока накопления 9, в которых накапливаются или с которых считываются модули корреляционной функции.
Первый коммутатор 21 выполняет переключение сигналов, определяющих адреса накопления модулей, для первых J последовательностей и адреса ячеек памяти управляемого блока накопления 9, в которых накапливаются или с которых считываются модули корреляционной функции для последовательностей с (J+1)-й по (N+1)-ю. Первый коммутатор переключается по сигналу триггера 19. Триггер 19 устанавливается в единичное состояние сигналом со второго счетчика 20, который формируется после окончания J последовательностей.
Второй коммутатор 22 выполняет переключение сигнала управления накоплением для первых J последовательностей и сигнала управления накоплением для последовательностей с (J+1)-й по N-ю. Второй коммутатор 22 переключается по сигналу, который также поступает с триггера 19.
Второй счетчик 20 формирует сигнал выбора накапливаемого сигнала и сигнал окончания обработки, по которому заканчивается считывание временных позиций с третьего узла памяти 18 на выход блока.
Как правило, в цифровых блоках для синхронной работы всех их узлов, определения временных интервалов и выделения заданных моментов времени используются несколько последовательностей тактовых импульсов. С целью упрощения схемы блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 на фиг.3 тактовые импульсы не показаны.
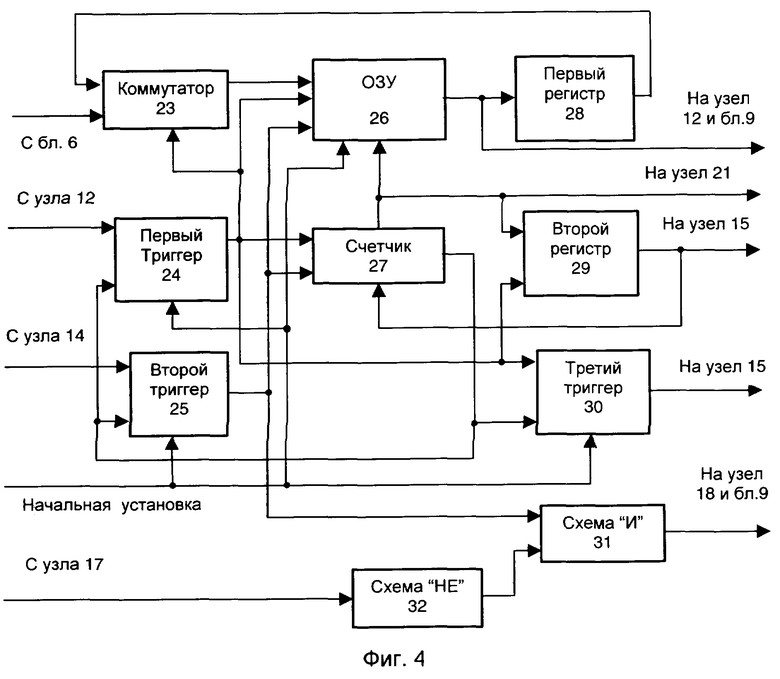
Вариант выполнения первого узла памяти приведен на фиг.4.
G максимальных значений модулей корреляционной функции записываются в ОЗУ 26. Адреса ОЗУ формируются счетчиком 27.
Если модуль корреляционной функции входного сигнала больше модуля корреляционной функции записанного по адресу Q, то по сигналу сдвига, поступающего на вход первого узла памяти 13 с первого узла сравнения 12, адреса модулей с адреса Q по адрес G сдвигаются на единицу и по адресу Q записывается модуль корреляционной функции входного сигнала. Сдвиг адресов представляет собой сдвиг на одну ячейку памяти всех модулей корреляционной функции с адреса Q по адрес G. При сдвиге первый триггер 24 формирует сигнал сдвига, первый регистр 28 и коммутатор 23 обеспечивают передачу модулей корреляционной функции с выхода ОЗУ 26 на его вход, третий триггер 30 формирует сигнал управления сдвигом временных позиций, поступающих на второй узел памяти 15, второй регистр 29 формирует адрес, с которого начинается сдвиг и который поступает на второй узел памяти 15.
После окончания каждой из J последовательностей по сигналу конца последовательности вторым триггером 25 формируется сигнал управлением считыванием модулей из ОЗУ 26 на выход первого узла памяти 13. На выход первого узла памяти 13 поступает также сигнал управления записью модулей, сформированный из сигналов управления считыванием модулей из ОЗУ 26 и сигнала поступающего на вход первого узла памяти 13 со второго узла сравнения 17. Запись запрещается, если через схему "НЕ" 32 на схему "И" 31 поступает сигнал со второго узла сравнения 17.
С целью упрощения схемы первого узла памяти на фиг.4 тактовые импульсы не показаны.
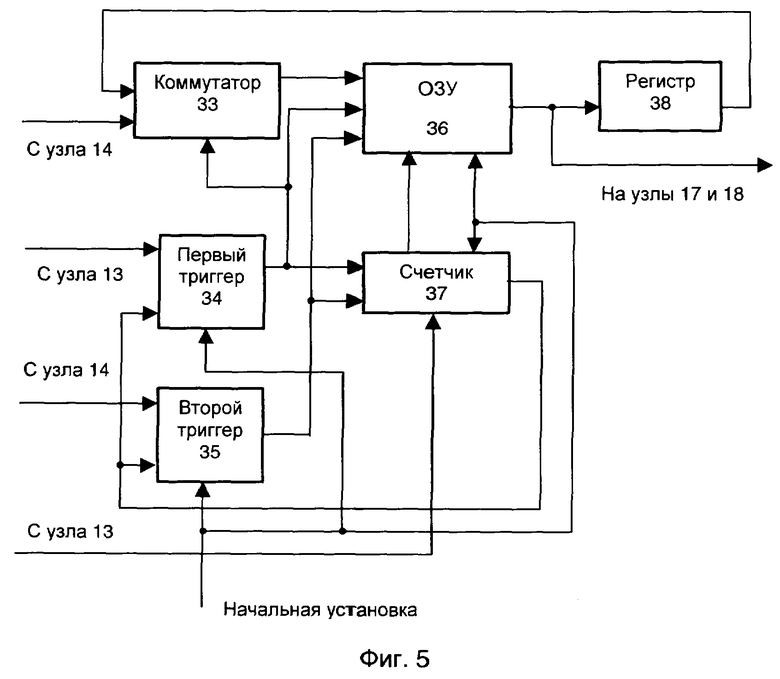
Вариант выполнения второго узла памяти приведен на фиг.5.
Временные позиции G максимальных значений модулей корреляционной функции записываются в ОЗУ 36. Адреса ОЗУ 36 формируются счетчиком 37.
После окончания каждой из J последовательностей по входному сигналу конца последовательности, который поступает на второй триггер 35, выполняют сортировку временных позиций. Для этого с первого блока памяти 13 на второй блок памяти 15 поступают сигналы управления сдвигом временных позиций и адрес, с которого начинается сдвиг. Сигнал управления сдвигом временных позиций поступает на первый триггер 34. Адрес, с которого начинается сдвиг, поступает на счетчик 37. Сортировка выполняется аналогично сортировке модулей корреляционной функции в первом узле памяти 13.
С целью упрощения схемы второго узла памяти 15 на фиг.5 тактовые импульсы не показаны.
Вариант выполнения третьего узла памяти 18 приведен на фиг.6.
После окончания каждой из J последовательностей по сигналу управления записью, поступающего из первого узла памяти 13 на счетчик 41 и ОЗУ 40, временные позиции максимальных значений модулей корреляционной функции, поступающие на вход третьего узла памяти 13, записываются в ОЗУ 40. Счетчиком 41 формирует адреса ОЗУ 40.
На каждой последовательности, с (J+1)-й по (N+1)-ю, из ОЗУ 40 считываются временные позиции всех максимальных значений и формируется сигнал, определяющий адреса ОЗУ, по которым записаны временные позиции максимальных значений. Сигналы, определяющие временной интервал с (J+1)-й по (N+1)-ю последовательность, поступают на триггер 39 со второго счетчика 20 блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10.
С целью упрощения схемы третьего узла памяти 18 на фиг.6 тактовые импульсы не показаны.
Вариант выполнения управляемого блока накопления 9 приведен на фиг.7.
С блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 модули корреляционной функции поступают на первый вход коммутатора 42. С блока объединения 8 суммы модулей корреляционной функции поступают на второй вход коммутатора 42. Управление коммутатором 42 осуществляется сигналом управления накоплением и сигналом управления записью модулей, поступающих с блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. С выхода коммутатора 42 модули корреляционной функции поступают на вход узла памяти 43. В исходном состоянии в узле памяти 43 записаны нули. Адрес ячейки узла памяти 43, в которую модуль корреляционной функции либо записывается по сигналу управления записью, либо накапливается по сигналу управления накоплением, поступающими на узел памяти 43 с блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. При записи значение модуля корреляционной функции записывается в ячейку узла памяти 43 с заданным адресом, а при накоплении с ячейки узла памяти 43 с заданным адресом сумма модулей корреляционной функции сначала считывается, затем записывается после суммирования с соответствующим модулем корреляционной функции в ту же ячейку. Адрес определяется сигналами, поступающим с блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10 на узел памяти 43. Если сигналы управления записью и накоплением, поступающие с блока 10, принимают нулевое значение, то с узла памяти 43 считывается сумма модулей, записанная по адресу, поступающему на узел памяти 43.
С целью упрощения схемы управляемого блока накопления 9 на фиг.7 тактовые импульсы не показаны.
Вариант выполнения узла памяти 43 управляемого блока накопления 9 приведен на фиг.8.
Адреса ОЗУ 44 формируются схемой "ИЛИ". На вход этой схемы поступают сигнал счетчика 46, сигнал, определяющий адрес записи, и сигнал, определяющий адрес накопления.
Если сигналы управления записью или накоплением, поступающие с блока 10, принимают нулевое значение, то сигналы, определяющие адрес записи и адрес накопления также принимают нулевое значение и на выход схемы "ИЛИ" поступает сигнал счетчика. При этом с ОЗУ 44 считывается сумма модулей, записанная по адресу сформированным счетчиком 46.
С целью упрощения схемы первого узла памяти на фиг.8 тактовые импульсы не показаны.
Блок объединения 8 можно выполнить, например, в виде последовательно соединенных коммутатора и сумматора. Входы коммутатора соединены с выходами блока определения модуля корреляционной функции 6 и блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. Выход коммутатора соединен с первым входом сумматора и по сигналу выбора сигнала переключает сигналы с блока определения модуля корреляционной функции 6 и с блока определения G максимальных значений последовательности модулей корреляционной функции и их временных позиций 10. Второй вход сумматора соединен с выходом управляемого блока накопления.
Вариант выполнения блока определения максимального модуля накопленного сигнала и его временной позиции 11 представлен на фиг.9.
Сигналом начальной установки триггер 53 устанавливается в нулевое состояние, а в первый регистр 48 и третий регистр 50 записывается нулевое значение. Пока триггер 53 находится в нулевом состоянии, в первом регистр 48 и третьем регистре 50 записано нулевое значение и, следовательно, блок определения максимального модуля накопленного сигнала и его временной позиции 11 находится в исходном состоянии.
Момент окончания сигнала управления выбором накапливаемого сигнала определяет момент окончания N последовательностей модулей корреляционных функций принимаемого сигнала. Поэтому определение максимального модуля накопленного сигнала и его временной позиции начинают после окончания сигнала управления выбором накапливаемого сигнала.
В момент окончания сигнала управления выбором накапливаемого сигнала триггер 53 устанавливается в "единичное" состояние. Во второй регистр 49 записываются текущие модули корреляционной функции накопленного сигнала. В третий регистр 50 записываются временные позиции текущего модуля корреляционной функции накопленного сигнала. Элемент сравнения 51 сравнивает значения, записанные в первый 48 и второй регистры 49. Если текущее значение, записанное во второй регистр 49, больше, чем значение, записанное в первый регистр 48, то модуль корреляционной функции из второго регистра 49 перезаписывается в первый регистр 48, а временная позиция модуля корреляционной функции, записанного в первый регистр 48, записывается в третий регистр 50. Временная позиция максимального модуля корреляционной функции с выхода третьего регистра 50 поступает на выход блока определения максимального модуля корреляционной функции накопленного сигнала и его временной позиции 11.
Все приведенные варианты выполнения блоков предлагаемого устройства могут быть выполнены на базе современных микропроцессоров, которые используются в цифровой технике связи.
Изобретение относится к радиотехнике, в частности к способам и устройствам поиска широкополосного сигнала, и может быть использовано в системах сотовой радиосвязи с кодовым разделением каналов (системах CDMA). При поиске широкополосного сигнала широко применяется согласованная фильтрация. Время накопления сигнала в согласованном фильтре ограничено нестабильностью опорных генераторов передатчика и приемника. Поэтому для обеспечения помехоустойчивости поиска сигнала после согласованной фильтрации выполняют некогерентное накопление сигнала. Задача, которую решает предлагаемое изобретение, заключается в существенном уменьшении емкости ОЗУ, которое используется для хранения результатов некогерентных накоплений сигнала, полученных при сканировании области неопределенности, и, следовательно, в упрощении мобильной станции. Для уменьшения емкости указанного ОЗУ накапливают не все вычисляемые модули корреляционной функции принимаемого периодического сигнала, а только ограниченное число максимальных модулей. 2 н.п. ф-лы, 9 ил.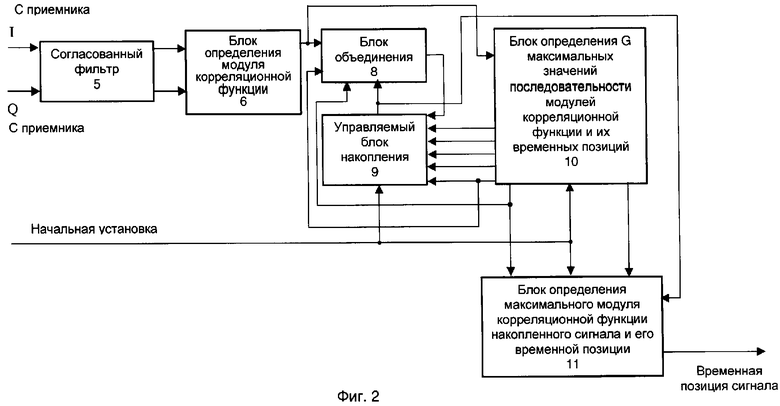
| US 6363060 B1, 26.03.2002 | |||
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2120180C1 |
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА | 2000 |
|
RU2168274C1 |
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОГО ПОИСКА В МОБИЛЬНОЙ СИСТЕМЕ СВЯЗИ, ИМЕЮЩЕЙ ПЕРЕМЕННУЮ СКОРОСТЬ ПЕРЕДАЧИ ДАННЫХ | 1999 |
|
RU2199184C2 |
| US 5805648 A, 08.09.1998.EP 1041725 A2, 04.10.2000 | |||
| Трехпозиционный регулятор температуры | 1980 |
|
SU877493A1 |
| US 5710768 A, 20.01.1998 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

