Изобретение относится к радиотехнике, в частности к способам и устройствам поиска многолучевого широкополосного сигнала, и может быть использовано в системах сотовой радиосвязи с кодовым разделением каналов (системах CDMA).
При приеме широкополосных многолучевых сигналов выполняется процедура поиска, которая, как правило, представляет собой сканирование области неопределенности с обнаружением сигнала в каждой ее точке.
Известны различные способы и устройства поиска многолучевого широкополосного сигнала, например, способ и устройство, описанные в патенте США №5805648 [1, патент США №5805648 "Method and apparatus for performing search acquisition in a CDMA communication system", Int. Cl. H 04 L 7/00]. Этот способ заключается в следующем. Проводится многократное сканирование области неопределенности с использованием приемника. При сканировании в каждой точке области неопределенности (при каждом возможном дискретном значении временной задержки сигнала) выполняют перемножение принимаемого и опорного сигнала, когерентное накопление полученного произведения. Вычисляют модуль полученного когерентного накопления произведения. В некогерентном аккумуляторе выполняют некогерентное накопление модулей когерентного накопления полученного произведения. Результаты некогерентного накопления сравнивают с порогом. Если порог превышен, то эта точка области неопределенности перепроверяется на следующей стадии поиска. На каждом этапе поиска может меняться число некогерентных накоплений и величина порога. На последнем этапе поиска принимают решение о величине задержки полезного сигнала.
Время поиска сигнала определяется числом точек области неопределенности (общим числом возможных дискретных значений временных задержек сигнала) и временем накопления при анализе для каждой точки. Поэтому время поиска может оказаться недопустимо большим. Существенно сократить время поиска можно, если использовать согласованную фильтрацию.
Известны способ и устройство поиска с применением согласованного фильтра, которые описаны в [Справочник. Цифровые радиоприемные системы. Под ред. М.И.Жодзишского. М.: Радио и связь. 1990, стр.105, Рис.4.10]. В указанном способе входной сигнал поступает на аналого-цифровой квадратурный преобразователь, в котором этот сигнал преобразуют в синфазную и квадратурную составляющие на нулевой частоте. Каждая квадратурная составляющая сигнала поступает на цифровой согласованный фильтр. Выходные сигналы согласованных фильтров возводят в квадрат и суммируют. Результат суммирования поступает на вход блока выбора максимума и сравнения с порогом, в котором выбирают максимальное значение из полученных сумм квадратов и полученное максимальное значение сравнивают с порогом. Если порог превышен, то принимается решение об обнаружении сигнала. Величина частотного сдвига определяется цифровым синтезатором частоты, который управляется блоком управления частотой.
Время накопления сигнала в согласованном фильтре ограничено нестабильностью опорных генераторов передатчика и приемника. Поэтому для обеспечения помехоустойчивости поиска сигнала после согласованной фильтрации выполняют некогерентное накопление сигнала.
В настоящее время в сотовых системах связи часто используется стандарт третьего поколения 3GPPP, описанный в [Technical Specification 3GPPP TS 25.211 Physical channels and mapping of transport channels onto physical channels (FDD) (2001-12)].
С базовой станции на мобильную передаются ортогональные первичные и вторичные пилот-последовательности. Длина первичной и вторичной пилот-последовательности, равна 256 чипам (длительность одного чипа равна 260 наносекундам), период следования этих последовательностей равен 2560 чипам (Чип - это длительность одного элементарного временного интервала псевдослучайной последовательности).
Информационная последовательность суммируется по модулю два со скремблирующим кодом.
В стандарте 3GPP на мобильной станции применяется трехэтапная процедура поиска [Technical Specification 3GPPP TS 25.214 Physical layer procedures (FDD) (2001-12)].
На первом этапе поиска мобильная станция выполняет синхронизацию с первичной пилот-последовательностью. В стандарте рекомендуется выполнять первый этап поиска с помощью согласованного фильтра. На втором этапе поиска мобильная станция выполняет синхронизацию со вторичной пилот-последовательностью. На третьем этапе поиска мобильная станция определяет скремблирующий код [Technical Specification 3GPPP TS 25.211 Physical channels and mapping of transport channels onto physical channels (FDD) (2001-12).]
Наиболее близким техническим решением к заявляемому изобретению - способу поиска многолучевого широкополосного сигнала и устройству для его реализации является изобретение, которое можно применить в системах связи стандарта 3GPPP [см. патент US 6363060 "Method and apparatus for fast WCDMA acquisition", H 04 J 13/00, Mar. 26, 2002].
В состав этой системы синхронизации широкополосных CDMA систем связи входят антенна, блок комплексного преобразования сигнала на нулевую частоту и комплексного аналого-цифрового преобразования сигнала (RCVR), обнаружитель первичной пилот последовательности, обнаружитель вторичной пилот последовательности и обнаружитель пилот сигнала.
В качестве способа-прототипа и устройства-прототипа использован способ поиска первичной пилот последовательности и устройство для его реализации, приведенные в патенте US 6363060.
Способ поиска - прототип заключается в следующем.
- Осуществляют последовательное с периодом Т, равным периоду повторения пилот-последовательности, суммирование К значений синфазной и квадратурной составляющей входного сигнала, получая, таким образом, синфазную и квадратурную последовательности сумм значений принимаемого сигнала.
- Выполняют согласованную фильтрацию полученных синфазной и квадратурной последовательности сумм значений принимаемого сигнала, получая синфазную и квадратурную составляющие корреляционной функции накопленного сигнала.
- Вычисляют модули значений корреляционной функции накопленного сигнала.
- Определяют максимальное значение модуля корреляционной функции накопленного сигнала.
- Принимают, что задержка максимального значения модуля корреляционной функции накопленного сигнала определяет местоположение полезного сигнала на периоде Т.
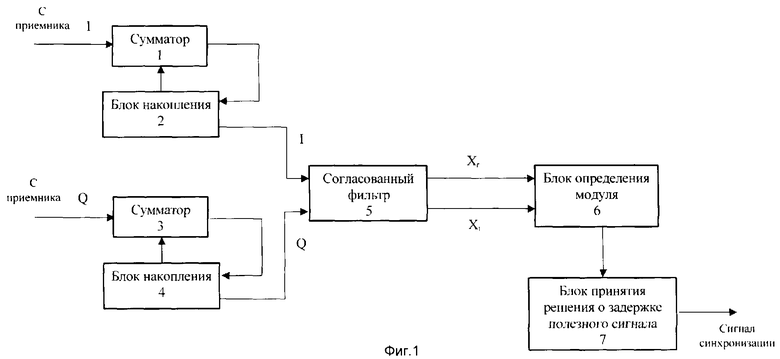
Устройство-прототип приведено на фиг.1.
Устройство содержит первый и второй сумматоры 1 и 3 соответственно для синфазного и квадратурного каналов, первый и второй блоки накопления 2 и 4, также соответственно для синфазного и квадратурного каналов, согласованный фильтр 5, блок определения модуля 6 и блок принятия решения о задержке полезного сигнала 7. Первые входы первого и второго сумматоров 1 и 3 являются входами значений соответственно синфазной и квадратурной составляющих входного сигнала. Вторые входы первого и второго сумматоров 1 и 3 являются входами суммы значений принятых сигналов и соединены с первыми выходами блоков накопления 2 и 4. Выходы сумматоров 1 и 3 соединены соответственно с входами соответствующих блоков накопления 2 и 4. Вторые выходы первого и второго блоков накопления 2 и 4 соединены соответственно с первым и вторым входами согласованного фильтра 5, которые являются входами синфазной и квадратурной составляющих входного сигнала. Первый и второй выходы согласованного фильтра 5, которые являются соответственно выходами синфазной и квадратурной составляющих корреляционной функции принимаемого сигнала, соединены с первым и вторым входами блока определения модуля 6, выход которого является выходом значения модуля корреляционной функции принимаемого сигнала и соединен со входом блока принятия решения о задержке полезного сигнала 7. Выход блока принятия решения о задержке полезного сигнала 7 является выходом сигнала синхронизации.
Способ и устройство поиска реализуют следующим образом. Цифровые отсчеты синфазной и квадратурной составляющей принятого сигнала поступают на входы сумматоров 1 и 3. На вторые входы сумматоров 1 и 3 поступают отсчеты, записанные в соответствующих блоках накопления 2 и 4. С периодом, равным периоду следования первичной пилот-последовательности Т, и шагом Δt в блоках накопления 2 и 4 накапливают цифровые значения входного сигнала. Например, если период следования первичного синхросигнала равен 2560 чипов, а шаг равен половине чипа, то устройство с периодом, равным 2560 чипов, накапливает в каждой из 5120 ячеек блоков накопления 2 и 4 сумму К отсчетов входного сигнала. После завершения накопления сигнала отсчеты с выходов блоков накопления 2 и 4 поступают на вход согласованного фильтра 5. Модули выходных отсчетов согласованного фильтра 5 через блок определения модуля 6 поступают на блок принятия решения о задержке полезного сигнала 7. Принимают, что задержка максимального значения модуля корреляционной функции накопленного сигнала определяет местоположение полезного сигнала на периоде Т. Выходной сигнал блока принятия решения о задержке полезного сигнала 7 определяет величину задержки полезного сигнала и поступает на выход устройства.
Управление блоком поиска первичного синхросигнала выполняется внешним контролером. Например, контролер определяет время накопления входных отсчетов сигнала в блоках накопления 2 (на фиг.1 управляющие сигналы не показаны).
В многолучевых каналах возникают глубокие замирания сигнала. Если период фединга меньше времени накопления сигнала, то замирания мало влияют на помехоустойчивость поиска (отношение сигнал/шум при заданных вероятностях ложной тревоги и пропуска сигнала). Если период фединга больше времени накопления сигнала, то помехоустойчивость поиска ухудшается. Поэтому число некогерентных накоплений сигнала выбирается таким образом, чтобы обеспечить заданную вероятность ложной тревоги и пропуска сигнала для наихудшего случая (низкая частота фединга, максимальное число пользователей в соте, максимальный уровень помех от соседних сот). Однако при увеличении числа некогерентных накоплений время поиска может оказаться недопустимо большим.
Задача, которую решает предлагаемое изобретение, заключается в уменьшении среднего времени поиска в каналах с федингом.
Для решения этой задачи в способ поиска многолучевого сигнала, заключающийся в том, что последовательно с периодом Т выполняют согласованную фильтрацию синфазной и квадратурной последовательности значений принимаемого сигнала, получая синфазную и квадратурную составляющие корреляционной функции сигнала, определяют модули значений корреляционной функции сигнала, дополнительно введены следующие операции:
- суммируют модули значений корреляционной функции сигнала, получая последовательность суммарных модулей корреляционных функций,
- для каждой последовательности суммарной корреляционной функции определяют максимальное значение и место его расположения,
- для каждого суммарного модуля корреляционной функции формируют два порога низкий и высокий, причем низкий порог определяют из условия обеспечения заданной вероятности пропуска полезного сигнала, а верхний порог определяют из условия обеспечения заданной вероятности ложной тревоги,
- для каждого суммарного модуля корреляционной функции, начиная с нулевого, проводят сравнение максимального значения с двумя порогами до тех пор, пока максимальное значение не оказалось ниже нижнего порога или выше верхнего порога,
- если максимальное значение суммарного модуля корреляционной функции оказывается ниже нижнего порога, то принимают решение об отсутствии сигнала в анализируемой области и переходят к анализу другой области или повторно анализируют ту же самую область, повторяя с самого начала всю последовательность операций,
- если для какой-либо последовательности сумм модулей корреляционной функции максимальное значение оказалось выше верхнего порога, то принимают решение об обнаружении полезного сигнала, при этом задержка полезного сигнала определяет его местоположение на периоде Т,
- если для N последовательных сумм модулей корреляционной функции максимальное значение находилось в промежутке между нижним и верхним порогами, то для N+1 суммы формируют один порог, определяющий заданную вероятность ложной тревоги или пропуска сигнала,
- если максимальный сигнал N+1 сумм модулей корреляционной функции оказывается ниже порога, то принимают решение об отсутствии полезного сигнала в анализируемой области и переходят к анализу другой области или повторно анализируют ту же самую область, повторяя с самого начала всю последовательность операций,
- если максимальный сигнал N+1 сумм модулей корреляционной функции оказывается выше порога, то принимают решение об обнаружении полезного сигнала, при этом задержка полезного сигнала определяет его местоположение на периоде Т.
Для сокращения среднего времени поиска в каналах с федингом в устройство поиска многолучевого широкополосного сигнала, содержащее сумматор, блок накопления, согласованный фильтр, блок вычисления модуля, причем первый и второй входы согласованного фильтра являются входами соответственно синфазной и квадратурной составляющих цифрового комплексного сигнала, первый и второй выходы согласованного фильтра являются выходами синфазной и квадратурной составляющей корреляционной функции принимаемого сигнала и соединены с первым и вторым входами блока определения модуля, второй вход сумматора соединен с выходом блока накопления, выход сумматора соединен с первым входом блока накопления,
дополнительно введены:
блок оценки среднеквадратичного значения шума, блок определения максимума последовательности сумм модулей корреляционной функции и его задержки, блок сравнения с верхним порогом, блок сравнения с нижним порогом, блок сравнения с промежуточным порогом, блок управления, причем первый и второй выходы согласованного фильтра соединены с первым и вторым входами блока оценки среднеквадратичного значения шума, которые являются входами синфазной и квадратурной составляющей корреляционной функции принимаемого сигнала, выход блока определения модуля, который является выходом последовательности модулей корреляционной функции принимаемого сигнала, соединен с первым входом сумматора, выход сумматора является выходом последовательности сумм модулей корреляционной функции и соединен с первым входом блока определения максимума последовательности сумм модулей корреляционной функции и его задержки, второй вход блока накопления соединен с первым выходом блока управления, который является выходом начальной установки блока накопления, второй выход блока управления, который является выходом начальной установки блока оценки среднеквадратичного значения шума, соединен с третьим входом блока оценки среднеквадратичного значения шума, четвертый вход блока оценки среднеквадратичного значения шума объединен со вторым входом блока управления и соединен с первым выходом блока определения максимума последовательности сумм модулей корреляционной функции и его задержки, который является выходом значений задержки максимума последовательности сумм модулей корреляционной функции, второй вход блока определения максимума последовательности сумм модулей корреляционной функции и его задержки соединен с третьим выходом блока управления, который является выходом начальной установки блока определения максимума последовательности сумм модулей корреляционной функции и его задержки, четвертый выход блока управления, который является выходом числа накопленных в блоке накопления последовательностей модулей корреляционной функции принимаемого сигнала, соединен с первыми входами блока сравнения с верхним порогом, блока сравнения с нижним порогом, блока сравнения с промежуточным порогом, вторые входы блока сравнения с верхним порогом, блока сравнения с нижним порогом, блока сравнения с промежуточным порогом соединены со вторым выходом блока определения максимума последовательности сумм модулей корреляционной функции и его задержки, который является выходом значений максимума последовательности сумм модулей корреляционной функции, третьи входы блока сравнения с верхним порогом, блока сравнения с нижним порогом, блока сравнения с промежуточным порогом соединены с выходом блока оценки среднеквадратичного значения шума, который является выходом среднеквадратичного значения шума на выходе согласованного фильтра, выходы блока сравнения с верхним порогом, блока сравнения с нижним порогом, блока сравнения с промежуточным порогом соединены соответственно с третьим, четвертым и пятым входами блока управления, которые являются входами сигналов превышения верхнего, нижнего и промежуточного порогов, первый вход блока управления является входом установки блока в исходное состояние, пятый выход блока управления является выходом значений задержки сигнала, а шестой выход - выход сигнала окончания поиска.
Сопоставительный анализ способа поиска многолучевого широкополосного сигнала с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет уменьшить среднее время поиска в канале с федингом.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ способа поиска многолучевого широкополосного сигнала отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает не очевидностью решения.
Графические материалы, поясняющие данное изобретение:
Фиг.1 - структурная схема устройства прототипа.
Фиг.2 - структурная схема предлагаемого устройства.
Фиг.3 - вариант блока определения максимума последовательности суммарных модулей корреляционной функции и его задержки.
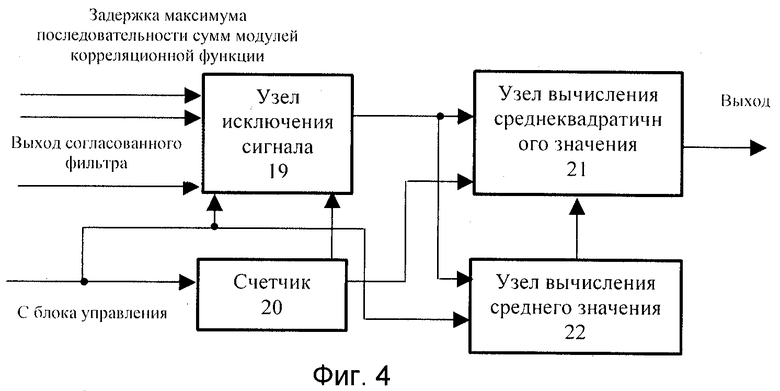
Фиг.4 - вариант выполнения блока оценки среднеквадратичного значения шума.
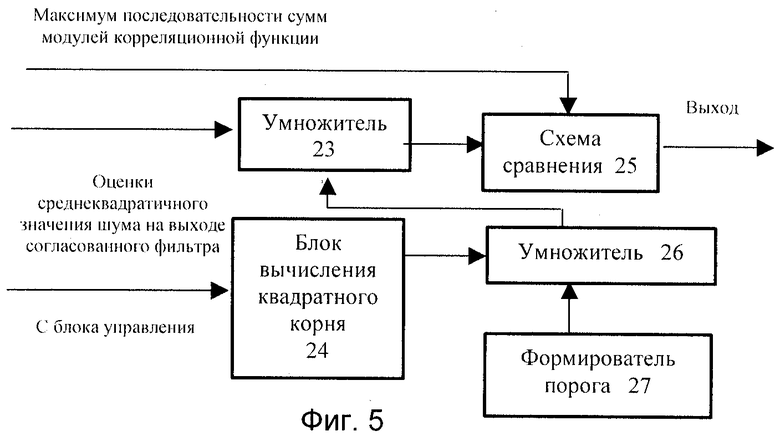
Фиг.5 - вариант выполнения блока сравнения с порогом.
Фиг.6 - вариант выполнения блока управления.
Предлагаемый способ поиска многолучевого широкополосного сигнала заключается в следующем.
- Последовательно с периодом Т, равным периоду повторения пилот-последовательности, выполняют согласованную фильтрацию синфазной и квадратурной составляющих принимаемого сигнала, получая корреляционную функцию синфазной и квадратурной составляющих принимаемого сигнала.
- Вычисляют модуль этой корреляционной функции, получая, таким образом, последовательность модулей корреляционной функции принимаемого сигнала.
- Суммируют модули значений корреляционной функции сигнала, получая последовательность суммарных модулей корреляционных функций.
- Для каждой последовательности суммарной корреляционной функции определяют максимальное значение и место его расположения.
- Для каждого суммарного модуля корреляционной функции формируют два порога низкий и высокий, причем низкий порог определяют из условия обеспечения заданной вероятности пропуска полезного сигнала, а верхний порог определяют из условия обеспечения заданной вероятности ложной тревоги.
- Для каждого суммарного модуля корреляционной функции, начиная с нулевого, проводят сравнение максимального значения с двумя порогами до тех пор, пока максимальное значение не оказалось ниже нижнего порога или выше верхнего порога.
- Если максимальное значение суммарного модуля корреляционной функции оказывается ниже нижнего порога, то принимается решение об отсутствии сигнала в анализируемой области, в этом случае либо переходят к анализу другой области, либо к повторному анализу той же самой области, повторяя с самого начала всю последовательность операций.
- Если для какой-либо последовательности сумм модулей корреляционной функции максимальное значение оказалось выше верхнего порога, то принимается решение об обнаружении полезного сигнала, при этом задержка полезного сигнала определяет его местоположение на периоде Т.
- Если для N последовательных сумм модулей корреляционной функции максимальное значение находилось в промежутке между нижним и верхним порогами, то для N+1 суммы формируют один порог определяющий заданную вероятность ложной тревоги или пропуска сигнала.
- Если максимальный сигнал N+1 сумм модулей корреляционной функции оказывается ниже порога, то принимается решение об отсутствии полезного сигнала в анализируемой области, в этом случае либо переходят к анализу другой области, либо к повторному анализу той же самой области, повторяя с самого начала всю последовательность операций.
- Если максимальный сигнал N+1 сумм модулей корреляционной функции оказывается выше порога, то принимается решение об обнаружении полезного сигнала, при этом задержка полезного сигнала определяет его местоположение на периоде Т.
В предлагаемом способе время накопления сигнала (число некогерентных накоплений) зависит от отношения сигнал/шум. Число некогерентных накоплений увеличивается при глубоких замираниях сигнала, увеличении уровня помех от соседних сот и увеличении числа пользователей в соте. Для этого максимальное значение каждой последовательности сумм модулей корреляционной функции принимаемого сигнала сравнивают с двумя порогами. При высоком отношении сигнал/шум верхний порог будет превышен при малом числе некогерентных накоплений, а при низком отношении сигнал/шум число некогерентных накоплений увеличивается. При отсутствии сигнала низкий порог не будет превышен при малом числе некогерентных накоплений, и будет анализироваться следующая точка области неопределенности. Следовательно, среднее времени поиска в каналах с федингом будет уменьшаться.
Таким образом, предлагаемый способ поиска многолучевого широкополосного сигнала по сравнению с известными техническими решениями в данной области техники позволяет сократить время поиска сигнала в каналах с федингом.
Для реализации предлагаемого способа используется устройство, блок-схема которого показана на фиг.2.
Предлагаемое устройство поиска содержит сумматор 1, блок накопления 2, согласованный фильтр 5, блок определения модуля 6, блок оценки среднеквадратичного значения шума 8, блок определения максимума последовательности сумм модулей корреляционной функции и его задержки 9, блок сравнения с верхним порогом 10, блок сравнения с нижним порогом 11, блок сравнения с промежуточным порогом 12, блок управления 13. Первый и второй входы согласованного фильтра 5 являются входами соответственно синфазной и квадратурной составляющих цифрового комплексного сигнала, первый и второй выходы согласованного фильтра 5 являются выходами синфазной и квадратурной составляющей корреляционной функции принимаемого сигнала и соединены с первым и вторым входами блока вычисления модуля 6 и первым и вторым входами блока оценки среднеквадратичного значения шума 8. Выход блока вычисления модуля 6, который является выходом последовательностей модулей корреляционной функции принимаемого сигнала, соединен с первым входом сумматора 1, второй вход сумматора 1 является входом суммы модулей корреляционной функции и соединен с выходом блока накопления 2. Выход сумматора 1 является выходом последовательности сумм модулей корреляционной функции и соединен с первым входом блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9 и с первым входом блока накопления 2. Второй вход блока накопления 2 соединен с первым выходом блока управления 13, который является выходом начальной установки блока накопления. Второй выход блока управления 13, который является выходом начальной установки блока оценки среднеквадратичного значения шума, соединен с третьим входом блока оценки среднеквадратичного значения шума 8. Четвертый вход блока оценки среднеквадратичного значения шума 8 объединен со вторым входом блока управления 13 и соединен с первым выходом блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9, который является выходом значения задержки максимума последовательности сумм модулей корреляционной функции. Второй вход блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9 соединен с третьим выходом блока управления 13, который является выходом начальной установки блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9. Четвертый выход блока управления 13, который является выходом числа накопленных в блоке накопления 2 последовательностей модулей корреляционной функции принимаемого сигнала, соединен с первым входом блока сравнения с верхним порогом 10, с первым входом блока сравнения с нижним порогом 11, с первым входом блока сравнения с промежуточным порогом 12. Вторые входы блока сравнения с верхним порогом 10, блока сравнения с нижним порогом 11, блока сравнения с промежуточным порогом 12 соединены со вторым выходом блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9, который является выходом значения максимума последовательности сумм модулей корреляционной функции. Третьи входы блока сравнения с верхним порогом 10, блока сравнения с нижним порогом 11, блока сравнения с промежуточным порогом 12 соединены с выходом блока оценки среднеквадратичного значения шума 8, который является выходом среднеквадратичного значения шума на выходе согласованного фильтра 5. Выходы блока сравнения с верхним порогом 10, блока сравнения с нижним порогом 11, блока сравнения с промежуточным порогом 12 соединены соответственно с третьим, четвертым и пятым входами блока управления 13, которые являются входами сигналов превышения верхнего, нижнего и промежуточного порогов. Первый вход блока управления 13 является входом установки блока в исходное состояние, пятый выход блока управления 13 является выходом значений задержки сигнала, а шестой выход - выход сигнала окончания поиска.
Предлагаемое устройства поиска многолучевого широкополосного сигнала работает следующим образом.
Цифровой сигнал с приемника поступает на вход согласованного фильтра 5. Последовательно с периодом Т, равным периоду повторения пилот-последовательности выполняют согласованную фильтрацию принимаемого сигнала, получая корреляционную функцию принимаемого сигнала.
Синфазная и квадратурная составляющие выходного сигнала согласованного фильтра 5 поступают на входы блока вычисления модуля 6. В этом блоке вычисляют модули значений выходного сигнала согласованного фильтра 5. То есть вычисляют модуль корреляционной функции принимаемого сигнала, получая, таким образом, последовательность модулей корреляционной функции принимаемого сигнала. Каждому периоду повторения пилот-последовательности соответствует определенная последовательность модулей корреляционной функции принимаемого сигнала.
Модули значений выходного сигнала согласованного фильтра 5 поступают на вход сумматора 1. На второй вход сумматора 1 поступают суммы модулей корреляционной функции, записанные в блоке накопления 2. В исходном состоянии, которое задается блоком управления 13, в блоке накопления 2 записаны нули. Таким образом, осуществляют последовательное суммирование модулей корреляционной функции принимаемого сигнала, получая последовательность сумм модулей корреляционной функции.
С выхода сумматора 1 отсчеты поступают на входы блока накопления 2 и блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9.
С периодом, равным периоду следования пилот-последовательности, и шагом, равным периоду дискретизации принимаемого сигнала в блоке накопления 2, накапливают модули выходного сигнала согласованного фильтра 5. Например, если период следования первичного синхросигнала равен 2560 чипов, а период дискретизации равен половине чипа, то устройство с периодом, равным 2560 чипов, накапливает в каждой из 5120 ячейках блока накопления сумму модулей выходного сигнала согласованного фильтра 5.
В блоке определения максимума последовательности сумм модулей корреляционной функции и его задержки 9 на периоде следования пилот-последовательности Т определяют максимальное значение накопленной в блоке накопления 2 последовательности сумм модулей корреляционной функции принимаемого сигнала и запоминают его временное положение. Таким образом, для каждой последовательности сумм модулей корреляционной функции принимаемого сигнала определяют максимальное значение и время его возникновения на периоде Т.
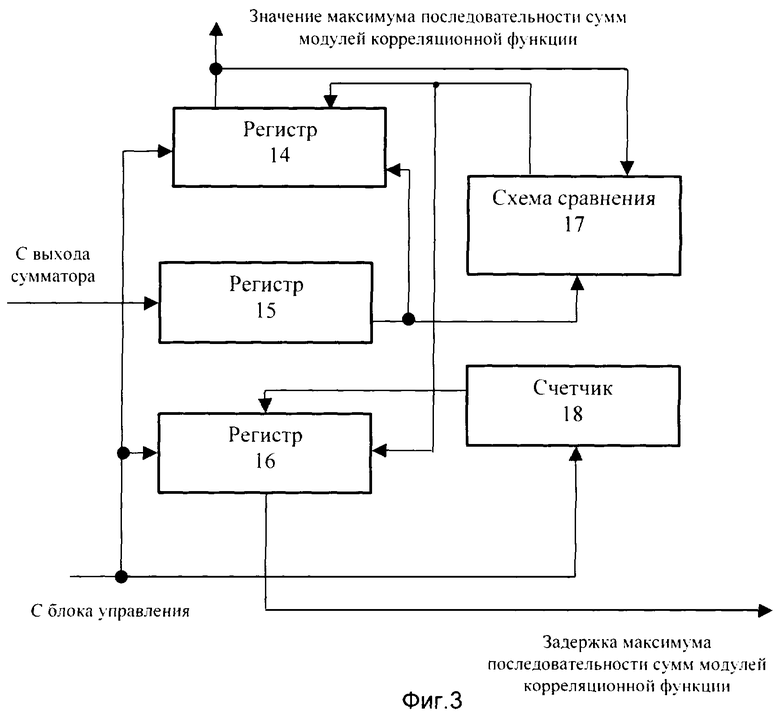
Вариант выполнения блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9 представлен на фиг.3. Такой блок можно выполнить в виде трех регистров 14, 15, 16, элемента сравнения 17 и счетчика тактовых импульсов 18 (на фиг.2 и фиг.3 тактовые импульсы не показаны). В первый регистр 14 в исходном состоянии, задаваемом блоком управления 13, записывается нулевое значение. Во второй регистр 15 записываются текущие суммы модулей корреляционной функции принимаемого сигнала. Число, записанное в счетчике 18, равно числу сумм модулей выходных значений согласованного фильтра 5, поступивших на вход блока 9. Элемент сравнения 17 сравнивает значения, записанные в регистры 14 и 15. Если текущее значение, записанное во второй регистр 15 больше, чем значение, записанное в первый регистр 14, то значение суммы модуля корреляционной функции из второго регистра 15 перезаписывается в первый регистр 14, а значение счетчика 18 записывается в третий регистр 16. Максимальное значение последовательности сумм модулей корреляционной функции с выхода первого регистра 14 поступает на выход блока 9 и далее на блоки сравнения с верхним 10, нижним 11 и промежуточным порогами 12, а его сдвиг с выхода третьего регистра 16 поступает на выход блока 9 и далее на блок оценки среднеквадратичного значения шума 8 и блок управления 13.
Блок оценки среднеквадратичного значения шума 8 можно выполнить так, как показано на фиг.4. Блок 8 работает следующим образом. Выходные значения согласованного фильтра 5 поступают через узел исключения сигнала 19 на вход узла вычисления среднего значения выходных значений согласованного фильтра 22. В узле исключения сигнала 19 максимальное значение сигнала и сдвинутые относительно него на чип или менее отсчеты приравниваются к нулю. В узле вычисления среднего значения выходных отсчетов согласованного фильтра 22, используя формулы из [В.И.Тихонов. Статистическая радиотехника. М.: Радио и связь, 1982], вычисляется среднее значение выходных значений согласованного фильтра:
где ХI,i, и XI,i синфазные и квадратурные выходные значения согласованного фильтра 5.
Затем, используя формулы из [В.И.Тихонов. Статистическая радиотехника. M.: Радио и связь, 1982], в узле вычисления среднеквадратичного отклонения 21 вычисляют среднеквадратичное значение:
Среднее значение выходных отсчетов согласованного фильтра 5 вычисляется no n комплексным выходным значениям согласованного фильтра, а среднеквадратичное значение по m комплексным значениям. Сумма n+m равна числу выходных значений согласованного фильтра 5 на периоде следования пилот-последовательности. Например, если период следования пилот последовательности равен 2560 чипов, а период дискретизации равен половине чипа, то n+m=5120.
Сигнал с блока управления 13 устанавливает в исходное состояние узел исключения сигнала 19, счетчик 20 и узел вычисления среднего значения выходных отсчетов согласованного фильтра 22. Узел вычисления среднеквадратичного значения 21 устанавливается в исходное состояние сигналом, формируемым счетчиком 20.
Тактовые импульсы формируются во всех цифровых устройствах и на фиг.4 не обозначены.
Все три блока сравнения с порогом (блоки сравнения с верхним 10, нижним 11 и промежуточным порогами 12) могут быть выполнены по единой схеме, приведенной на фиг.5. В блоке сравнения с порогом максимальное значение последовательности сумм модулей корреляционной функции сравнивают с порогом, равным произведению трех сомножителей: среднеквадратичного значения шума на выходе согласованного фильтра, корня квадратного из числа накопленных в блоке накопления 2 последовательностей модулей корреляционной функции и заранее определенной нормированной к среднеквадратичному значению шума величине порога. Заранее определенная и нормированная к среднеквадратичному значению шума величина порога формируется в формирователе порога 27, который можно реализовать на основе ПЗУ.
Если для какой-либо последовательности сумм модулей корреляционной функции принимаемого сигнала максимальное значение оказалось ниже нижнего порога, то блоком управления 13 принимается решение об отсутствии сигнала в анализируемой области. С блока управления 13 на выход устройства поступают сигнал окончания поиска и равная нулю задержка принимаемого сигнала.
Если для какой-либо последовательности сумм модулей корреляционной функции принимаемого сигнала максимальное значение оказалось выше верхнего порога, то принимается решение об обнаружении полезного сигнала. С блока управления 13 на выход устройства поступают сигнал окончания поиска и задержка принимаемого сигнала.
Если для N последовательностей модулей корреляционной функции принимаемого сигнала максимальное значение находилось в промежутке между нижним и верхним порогами, то для N+1 последовательности выполняют сравнение максимального значения с промежуточным порогом. Если максимальный сигнал оказывается ниже порога, то принимается решение об отсутствии полезного сигнала в анализируемой области. С блока управления 13 на выход устройства поступают сигнал окончания поиска и задержка принимаемого сигнала равная нулю. Если максимальный сигнал оказывается выше порога, то принимается решение об обнаружении полезного сигнала. С блока управления 13 на выход устройства поступают сигнал окончания поиска и задержка принимаемого сигнала.
Вариант выполнения блока управления 13 представлен на фиг.6.
Блок управления 13 работает следующим образом.
На вход блока управления 13 поступает сигнал, который устанавливает счетчики 28, 29, регистры 34 и 43 и триггеры 32, 36 и 41 блока 13 в исходное состояние. Этот сигнал также поступает на выход блока 13 и далее выполняет начальную установку блока накопления 2, а через схему ИЛИ 33 поступает на выход блока 13 и далее выполняет начальную установку блока оценки среднеквадратичного значения шума 8. Счетчик 28 с периодом, равным периоду повторения пилот-последовательности, формирует сигнал, который поступает на вход счетчика 29 и через схему ИЛИ 33 поступает на выход блока 13 и далее выполняет начальную установку блока оценки среднеквадратичного значения шума 8, а также через последовательный регистр 34, выполняющий роль задержки сигнала, поступает на выход блока 13 и далее выполняет начальную установку блока определения максимума последовательности сумм модулей корреляционной функции и его задержки 9.
Счетчик 29 считает накопленные в блоке накопления 2 последовательности модулей корреляционной функции принимаемого сигнала. Полученное число последовательностей поступает на схему сравнения 30 и на выход блока 13 и далее на блоки сравнения с порогами 10, 11, 12.
Если число последовательностей больше N, то схема сравнения 30 формирует сигнал, поступающий на схему И 31 и через схему ИЛИ 39 на выход блока 13, как сигнал окончания поиска. На второй вход схемы И 31 поступает сигнал превышения промежуточного порога. Если число последовательностей больше N и превышен промежуточный порог, то триггер 32 устанавливается в "единичное" состояние и его выходной сигнал через схему ИЛИ 37 поступает на узел элементов И 42. На второй вход узла И 42 поступает задержка максимума. Узел И 42 выполняет логическую операцию "И" со всеми разрядами сигнала, определяющего временную задержку максимума последовательности сумм модулей корреляционной функции. Таким образом, если число последовательности сумм больше N и превышен промежуточный порог, временная задержка максимального значения с выхода узла И 42 записывается в регистр 43.
Если число последовательностей больше N и не превышен промежуточный порог, то в регистр 43 записывается нулевое значение задержки сигнала.
Сигналы превышения верхнего и нижнего порогов через схемы И 35, НЕ 40 и И 38 поступают на входы триггера 36 и триггера 41. В случае превышения верхнего порога или не превышения нижнего порога, соответствующий триггер устанавливается в единичное состояние и его выходной сигнал через схему ИЛИ 39 поступает на выход блока 13, как признак сигнал окончания поиска.
Если превышен верхний порог, то выходной сигнал триггера 36 через схему ИЛИ 37 поступает на узел И 42. На второй вход узла И 42 поступает задержка максимума. Узел И 42 выполняет логическую операцию "И" со всеми разрядами сигнала, определяющего временную задержку максимального значения, накопленного в блоке накопления 2 сигнала. Таким образом, временная задержка максимального значения с выхода узла И 42 записывается в регистр 43.
Если не превышен нижний порог, то в регистр 43 записывается нулевое значение задержки сигнала.
Таким образом, при высоком отношении сигнал/шум верхний порог будет превышен при малом числе некогерентных накоплений, а при низком отношении сигнал/шум число некогерентных накоплений увеличивается. При отсутствии сигнала низкий порог не будет превышен при малом числе некогерентных накоплений, и будет анализироваться следующая точка области неопределенности, и среднее времени поиска в каналах с федингом будет уменьшаться.

Изобретение относится к радиотехнике, в частности к способам и устройствам поиска многолучевого широкополосного сигнала, и может быть использовано в системах сотовой радиосвязи с кодовым разделением каналов (системах CDMA). Достигаемый технический результат - сокращение времени поиска многолучевого широкополосного сигнала. В предлагаемом изобретении время накопления сигнала зависит от отношения сигнал/шум. Число некогерентных накоплений увеличивается при глубоких замираниях сигнала, увеличении уровня помех от соседних сот и увеличении числа пользователей в соте. Для этого максимальное значение каждой последовательности суммарных модулей корреляционной функции принимаемого сигнала сравнивают с двумя порогами. При высоком отношении сигнал/шум верхний порог будет превышен при малом числе некогерентных накоплений, а при низком отношении сигнал/шум число некогерентных накоплений увеличивается. При отсутствии сигнала низкий порог не будет превышен при малом числе некогерентных накоплений, и будет анализироваться следующая точка области неопределенности. Таким образом, среднее времени поиска в каналах с федингом будет уменьшаться. 2 с.п. ф-лы, 6 ил.
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2120180C1 |
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА | 2000 |
|
RU2168274C1 |
| Двигатель внутреннего сгорания | 1981 |
|
SU1041725A2 |
| Трехпозиционный регулятор температуры | 1980 |
|
SU877493A1 |
| US 5710768 A, 20.01.1998. | |||

