Изобретение относится к железнодорожному транспорту, в частности к устройствам автоматики и телемеханики, осуществляющим контроль технического и коммерческого состояния движущегося железнодорожного состава и видеоконтроль сохранности, состояния крыш и стенок вагонов, люков цистерн, разгрузочных и иных устройств, расположенных в нижней части вагона, а также крепления грузов на открытых железнодорожных подвижных единицах на экране монитора во время прохождения поезда в зоне наблюдения. Таким образом, решение направлено на повышение уровня контроля коммерческих неисправностей на железных дорогах, повышение сохранности перевозимых грузов, повышение функциональности системы.
Из уровня техники известно техническое решение RU 2682148 C1, 14.03.2019 в котором раскрыта система, которая содержит над рельсовым путем П-образную несущую конструкцию, включающую две опоры и ригель, телевизионные камеры, электронно-вычислительную машину, монитор, сканирующие лазерные дальномеры, блок формирования изображения контура вагона, блок сравнения, блок хранения информации о предельном железнодорожном габарите, блок хранения информации о форме боковых поверхностей и крыш вагонов, блок построения рельефа распределения груза по площади полувагона, блок вычисления объема груза, блок вычисления веса груза, контроллеры идентификации промежутков между вагонами и цифровой логический элемент.
Недостатком данного решения является недостаточный уровень контроля неисправностей и негабаритностей железнодорожных вагонов и грузов.
Задачей заявленного решения является внедрение автоматизированной системы коммерческого осмотра 3D Контроль (АСКО 3D Контроль) для автоматического выявления коммерческих неисправностей вагонов в поездах.
Технико-экономическим результатом является обеспечение повышенного уровня безопасности на железных дорогах, за счет: 1. Расширения функция контроля неисправностей и выхода за габарит железнодорожных вагонов или грузов; 2. Улучшения качества осмотра; 3. Повышения прогнозируемости случаев нарушения безопасности движения поездов; 4. Снижения затрат на эксплуатацию инфраструктуры и подвижного состава.
Достигается данный результат тем, что система АСКО 3D Контроль осуществляет построение трёхмерной модели подвижной железнодорожной единицы (далее 3D модель вагона), её интеллектуальную обработку, контроль соответствия полученных параметров 3D модели вагона заданным шаблонам, выявление смещений элементов вагона и груза, вычисляемых относительно уровня головки рельса, а также выявление смещений элементов вагона и груза, вычисляемых относительно данных полученных при погрузке и 3D модели вагона полученной при осмотре на предыдущей системе АСКО 3D Контроль по маршруту следования поезда. Заявленный технический результат обеспечивается входящими в состав АСКО 3D Контроль камерами для формирования видеоизображения установленными слева, справа и над рельсовым путем, тремя (и более) лазерными сканерами по одному слева и справа, один над рельсовым путем. При этом все данные с камер и сканеров передаются на ПЭВМ, а в качестве камер используются камеры линейного сканирования и/или камеры высокой четкости с системой собственного шумоподавления, причем камеры расположены, по меньшей мере, по две слева и справа от рельсового пути и по меньшей мере две камеры над рельсовым путем, причем нижние камеры слева и справа установлены на уровне 0,5 – 1,5м. от головки рельса, а в качестве лазерных сканеров могут быть использованы однолучевые сканеры либо многолучевые, также в месте установки камер и сканеров (в одной плоскости) на рельсе устанавливается тензометрический датчик счета колёс (ТДСК), а слева, справа или над рельсовым путем оптический датчик измерения скорости (ОДИС), причем данные от телекамер, сканеров и датчиков передаются по локальной вычислительной сети на входы модуля обработки сигналов, выход которого соединен с сетевым коммутатором, который передает сигналы на ПЭВМ автоматизированного рабочего места (АРМ), причем на АРМ осуществляется визуализация, обработка, хранение и архивация информации, а с помощью тензометрического датчика счета колес (ТДСК) определяется начало и конец состава, производится счет вагонов, с помощью оптического датчика измерения скорости (ОДИС) вычисляется скорость контролируемого состава, выявляется по заранее определенным критериям нарушения габаритов погрузки и подвижного состава, также сопоставляются результаты проведенного контроля, в том числе и сформированная 3D модель вагона и/или поезда и/или груза, с информацией, полученной по результатам предыдущих осмотров пути следования и данных, полученных из смежных систем осуществивших контроль ранее по маршруту следования вагона и груза, а также получают прогнозную вероятность дальнейшего изменения состояния положения груза относительно первичного результата контроля в пути следования. Дополнительно система содержит подсистему искусственного освещения, а именно два светодиодных прожектора для освещения стенок вагонов попарно установленных слева и справа от рельсового пути, а для освещения крыш вагонов - два светодиодных прожектора, расположенные над рельсовым путем. Кроме этого подсистема искусственного освещения включается посредством цифрового астрономического таймера или по приходу поезда в темное время суток. В другом варианте по результатам осмотра, с помощью собственных технических средств видеофиксации и лазерного контроля, а также обработки оператором АРМ, в автоматическом режиме формируется справка, причем справка через дополнительный сетевой коммутатор автоматически передается на рабочее АРМ пункта коммерческого осмотра (АРМ ПКО). Также предусмотрен автоматический контроль габаритов с помощью лазерных сканеров на скоростях до 80 км/ч. Дополнительно возможно взаимодействие системы осмотра со смежными автоматизированными системами посредством волоконно-оптической системы передачи данных (ВСПД). Также осуществляется контроль при вскрытии аппаратного шкафа расположенного на несущей конструкции и производится запись видеофрагмента с той телекамеры, которая запрограммирована и, в зоне просмотра которой, находится шкаф, а также подается звуковой сигнал на АРМ о данном событии и сообщение о вскрытии шкафа на экране монитора. Кроме этого система снабжена возможностью подачи звукового сигнала сиреной в створе несущей конструкции контролируемого пути.
Краткое описание чертежей:
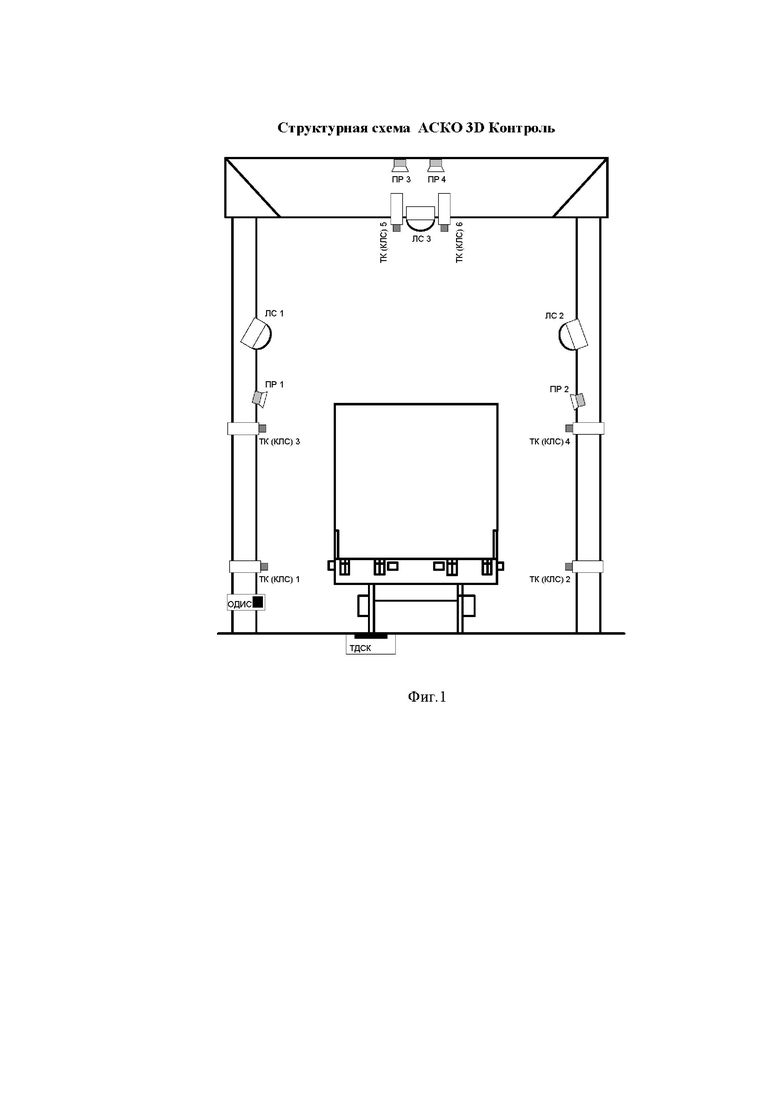
фиг.1 – Типовое размещение оборудования системы АСКО 3D Контроль, на несущей конструкции
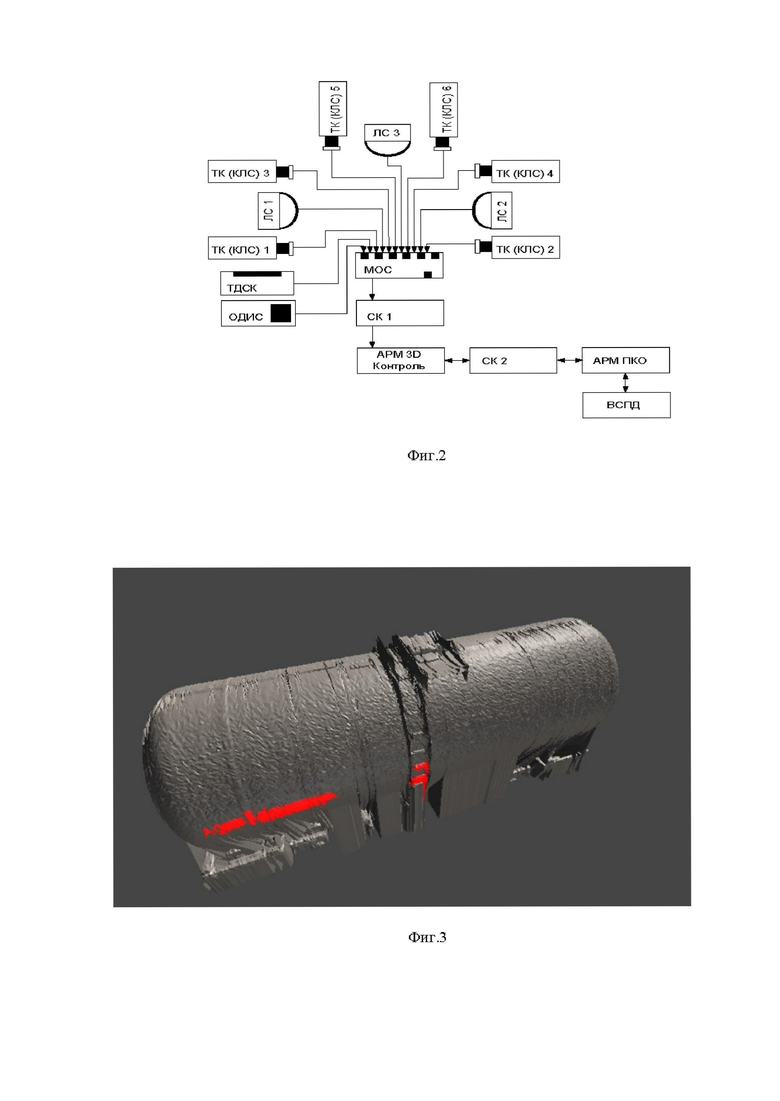
фиг.2 – структурная схема системы АСКО 3D Контроль
фиг.3 – отсканированный профиль 3D модели
На фиг.1 изображено размещение оборудования системы АСКО 3D, в состав которого входит:
ЛС 1, ЛС 2, ЛС 3 − комплект оборудования лазерного сканирования;
ТК (КЛС) 1, ТК (КЛС) 2, ТК (КЛС) 3, ТК (КЛС) 4, ТК (КЛС) 5, ТК (КЛС) 6 − комплект оборудования видеонаблюдения;
ПР 1, ПР 2, ПР 3, ПР 4 − комплект оборудования освещения;
ТДСК - тензометрический датчик счета колёс;
ОДИС - оптический датчик измерения скорости.
Комплект оборудования подсистемы видеонаблюдения включает в себя шесть сетевых камер высокого разрешения либо камер линейного сканирования:
− телекамера ТК1 - предназначена для контроля левой стенки вагона в нижней части;
− телекамера ТК2 - предназначена для контроля правой стенки вагона в нижней части;
− телекамера ТК3 - предназначена для контроля левой стенки вагона;
− телекамера ТК4 - предназначена для контроля правой стенки вагона.
− телекамера ТК5 - предназначена для контроля состояния люков цистерн;
− телекамера ТК6 - предназначена для контроля крыши вагона по всей ширине;
На фиг.2 изображена структурная схема системы АСКО 3D Контроль
МОС – модуля обработки сигналов
СК 1 – сетевой коммутатор
АРМ 3D Контроль – автоматизированное рабочее место оператора, где происходит основная обработка информации
СК 2 – дополнительный сетевой коммутатор
АРМ ПКО - автоматизированное рабочее место оператора где происходит дополнительная обработка
ВСПД - волоконно-оптической системы передачи данных.
Конструкция и работа.
Автоматизированная система коммерческого осмотра 3D контроль (АСКО 3D Контроль) предназначена для выявления в процессе движения поездов коммерческих неисправностей, угрожающих безопасности движения и сохранности перевозимых грузов путём построения 3D модели вагона, её интеллектуальной обработки, визуальный контроль, контроль соответствия полученных параметров 3D модели вагона заданным шаблонам габаритов, контроль соответствия полученных параметров 3D модели вагона заданным эталонным моделям вагонов, выявления смещений элементов вагона и груза, вычисляемых относительно уровня головки рельса, а также выявления смещений элементов вагона и груза вычисляемых относительно данных полученных при погрузке и 3D модели вагона полученной при осмотре на предыдущей системе АСКО 3D Контроль по маршруту следования поезда. В системе используются камеры высокой четкости и/или камеры линейного сканирования, формирующие изображение за счет построчного сканирования объекта съемки. Камеры (всего 6, но может быть и больше) расположены по 2 слева и справа от рельсового пути и 2 камеры расположены над рельсовым путем. Например, камеры могут быть установлены на железнодорожных мостах, в железнодорожных тоннелях или на несущей конструкции, включающей две опоры и ригель. По одной из боковых камер находятся на уровне 0,5 – 1,5м от головки рельса, предпочтительно от 0,5-1м, также возможен, вариант, 0,55-0,95м, вариант 0,6-0,9м, вариант 0,65-0,85м от головки рельса. Данные камеры обладают системой собственного шумоподавления и сверхвысоким разрешением (до 16k). Данные от телекамер передаются по локальной вычислительной сети на входы модуля обработки сигналов. Выход данного блока соединен с сетевым коммутатором, от которого сигнал поступает на ПЭВМ. Оператор в процессе прохождения контролируемого состава получает 3D модель состава, где неисправности выделены цветом. Оператор может помечать вагон с визуально замеченной коммерческой неисправностью для последующей обработки и принятия решения. В видеоокнах на экранах мониторов АРМ предусмотрена компенсация геометрических искажений видеоизображений от телекамер линейного сканирования. Информация, получаемая системой от собственных технических подсистем видеофиксации и лазерного контроля в реальном времени выводится на монитор оператора в виде мультиэкранного интерфейса отображающего видеоизображение от телевизионных камер, интерактивную 3D модель вагона и груза с выявленными неисправностями для визуального выявления коммерческих неисправностей, одновременно с этим оператор получает результат автоматической обработки информации от средств контроля в части выявления программно-техническим модулем нарушений габаритов груза и подвижного состава, смещение груза относительно схемы погрузки, смещение груза в пути следования относительно вагона, выявления неравномерности погрузки, смещения центра тяжести, остатков ранее перевозимых грузов, неснятых или ошибочных знаках опасности, несоответствии инвентарного номера вагона заявленному в натурном списке поезда, отклонении веса вагона и груза относительно заявленных в перевозочных и иных документах, проломах, прорубах, перекосах кузова вагона. Дополнительно система должна обеспечивать получение и выдачу результирующей информации оператору о сравнении сформированной 3D модели, с полученными моделями от систем, осуществивших контроль ранее по маршруту следования вагона и груза, прогнозную вероятность дальнейшего изменения состояния положения груза относительно первичного результата контроля в пути следования. Также система должна обеспечить формирование соответствующих справок, донесений, телеграмм, ведение необходимых журналов. Ведение архивов видеозаписей и 3D моделей осмотренных поездов и вагонов, создание баз данных состояний вагонов и грузов за период единичной перевозки и в течение жизненного цикла вагона. Передачу информации о результатах контроля в смежные автоматизированные системы.
Создаваемая система представляет собой, как самостоятельный комплекс фиксации информации о коммерческом осмотре вагонов и грузов, её интеллектуальной обработки и формирования отчетной документации на одной железнодорожной станции, так и линейное звено сетевой системы, состоящей из нескольких систем АСКО 3D Контроль на маршрутах следования поездов, позволяющая проводить анализ и интеллектуальную обработку результатов полученных от аналогичных систем по всему пути следования поезда/вагона/груза.
АСКО 3D Контроль включает в себя 6 телевизионных камер высокого разрешения либо камер линейного сканирования (в зависимости от местных условий работы железнодорожной станции) для визуального контроля состояния крыш и стенок вагонов, люков цистерн, разгрузочных и иных устройств, расположенных в нижней части вагона, 3-х и более однолучевых, либо многолучевых лазерных сканера (в зависимости от местных условий работы железнодорожной станции), обеспечивающих контроль габаритов погрузки и подвижного состава, выявления неравномерности груза, остатков ранее перевозимых грузов, смещений груза относительно вагона и ранее проведенных измерений, получения базы данных измерений для создания, визуализации и архивирования 3D модели, а также дальнейшей интеллектуальной обработки, системы тензометрических и оптических датчиков счёта и измерения скорости движения вагонов в зоне контроля, системы освещения на базе светодиодных прожекторов со световым потоком в зависимости от применяемых телевизионных камер высокого разрешения либо линейного сканирования. Технические средства контроля, счета вагонов, а также контроллеры включения освещения объединены в локальную сеть и после обработки формированных сигналов в модуле обработки и согласования через сетевые коммутаторы передают информацию на Автоматизированное рабочее место АРМ 3D Контроль. АРМ 3D Контроль осуществляет программную интеллектуальную обработку полученной от собственных технических средств информацию, сопоставляет результаты проведенного контроля с информацией о контролируемых поездах, вагонах и грузах полученную по результатам предыдущих осмотров пути следования и данных полученных из смежных систем из АРМ ПКО. Осуществляет визуальное отображение результатов осмотра на экране монитора и архивацию результатов контроля всех подсистем. Результирующая справка передается в АРМ ПКО, в котором происходит дополнительная интеллектуальная обработка результатов коммерческого осмотра, формирование отчетно-учетной документации, необходимых сообщений, донесений и телеграмм. Осуществляется передача результатов осмотра во внешнюю сеть передачи данных.
Для размещения контрольного оборудования АСКО 3D Контроль в месте съема информации может быть установлена типовая несущая конструкция (устанавливается над одним либо несколькими железнодорожными путями, в зависимости от местных условий железнодорожной станции и состоит из металлических или железобетонных опор, на которых размещен металлический ригель).
Для обеспечения визуального контроля вагонов и грузов на несущей конструкции располагаются шесть телевизионных камер (ТК (КЛС) 1) – ТК (КЛС) 6). По 2 камеры с каждой стороны, расположенные на опорах несущей конструкции и 2 камеры на ригеле. В системе используются камеры высокой четкости (разрешение до 4k), либо камеры линейного сканирования, формирующие изображение за счет построчного сканирования объекта съёмки. Данные камеры обладают системой собственного шумоподавления и сверхвысоким разрешением (до 16k). В зависимости от местных условий станции, преобладания определённых типов вагонов и родов контролируемых грузов, система АСКО 3D Контроль может быть реализована в различной конфигурации и включать в себя различные варианты компоновки из стандартных камер высокого разрешения и камер линейного сканирования. Данные от телекамер передаются по локальной вычислительной сети на входы модуля обработки сигналов (МОС). Выход данного блока соединен с сетевым коммутатором, от которого сигнал поступает на ПЭВМ АРМ 3D Контроль.
Для обеспечения контроля габаритов и формирования 3D моделей контролируемых вагонов и груза на опорах и ригеле несущей конструкции размещается по меньшей мере по 3 лазерных сканера, по одному на каждой опоре и один на ригеле. В зависимости от местных условий станции, преобладания определённых типов вагонов и родов контролируемых грузов, система АСКО 3D Контроль может быть реализована на однолучевых сканерах, которые сканируют пространство в плоскости перпендикулярной движению вагона и измеряют в полярной системе координат расстояния и углы до различных точек контролируемых вагонов и грузов, либо на многолучевых сканерах, которые генерируют пучок лучей, распределяемых по поверхности объекта контроля. В результате измерений многолучевым сканером получается трехмерное облако точек, с большей точностью описывающих поверхность вагона и груза. Данные от сканеров (ЛС 1, ЛС 2 и ЛС 3) передаются по локальной вычислительной сети на входы модуля обработки сигналов (МОС). Выход данного блока соединен с сетевым коммутатором, от которого сигнал поступает на ПЭВМ АРМ 3D Контроль.
В месте установки телевизионных камер и сканеров (в одной плоскости) на рельсе устанавливается тензометрический датчик счета колёс (ТДСК), а на несущей конструкции оптический датчик измерения скорости (ОДИС). Сигналы от данных датчиков передаются по локальной вычислительной сети на входы модуля обработки сигналов (МОС) и далее через сетевой коммутатор на ПЭВМ АРМ 3D Контроль.
В момент входа состава в рабочую зону системы, от первой оси первой тележки состава, срабатывает тензометрический датчик счета колес (ТДСК), сигнал от которого поступает на вход модуля обработки сигналов (МОС), где формируется электрический импульс о начале состава, который через сетевой коммутатор (СК 1) запускает запись состава на автоматизированном рабочем месте АРМ 3D Контроль. В это же время видеосигналы от телевизионных камер (ТК (КЛС) 1) – ТК (КЛС) 6), сканеров (ЛС 1, ЛС 2 и ЛС 3) и оптического датчика измерения скорости (ОДИС), также передаются по локальной вычислительной сети на входы модуля обработки сигналов (МОС), где производится их предварительная обработка и синхронизация, далее через сетевой коммутатор (СК 1) поступают на автоматизированное рабочее место АРМ 3D Контроль.
Контролируемый состав, при прохождении рабочей зоны системы, визуализируется на средстве отображения - мониторе АРМ 3D Контроль, на который выводится информация от выбранных оператором для просмотра телевизионных камер (ТК (КЛС) 1) – ТК (КЛС) 6) и сканеров (ЛС 1, ЛС 2 и ЛС 3). Оператор в процессе прохождения контролируемого состава может помечать вагон с визуально замеченной, на средстве отображения, коммерческой неисправностью, для последующей обработки и принятия решения.
АРМ 3D Контроль, осуществляет визуализацию и обработку, хранение и архивацию, информации, с помощью тензометрического датчика счета колес (ТДСК) определяет начало и конец состава, производит счет вагонов, с помощью оптического датчика измерения скорости (ОДИС) вычисляет скорость контролируемого состава, выявляет по заранее определенным критериям нарушения габаритов погрузки и подвижного состава, сопоставляет результаты проведенного контроля с информацией о контролируемых поездах, вагонах и грузах, с информацией полученной по результатам предыдущих осмотров пути следования и данных полученных из смежных систем из АРМ ПКО.
По результатам осмотра, с помощью собственных технических средств видеофиксации и лазерного контроля, а также обработки оператором АРМ 3D Контроль, в автоматическом режиме формируется справка об обнаруженных коммерческих неисправностях. Сформированная справка, через сетевой коммутатор (СК 2), автоматически передается на рабочее АРМ ПКО. Посредством АРМ ПКО производится формирование отчетно-учетной документации: справок, донесений, телеграмм, ведение необходимых журналов.
Взаимодействие системы АСКО 3D Контроль со смежными автоматизированными системами производится посредством волоконно-оптической системы передачи данных (ВСПД).
Основные функциональные возможности системы:
− визуальный контроль с помощью телевизионных камер высокого разрешения либо посредством камер линейного сканирования (в зависимости от местных условий работы железнодорожной станции) состояния крыш и стенок вагонов, люков цистерн, разгрузочных и иных устройств, расположенных в нижней части вагона, а также крепления грузов на открытых железнодорожных подвижных единицах на экране монитора во время прохождения поезда в зоне наблюдения;
− вывод на экран монитора автоматизированного рабочего места оператора пункта коммерческого осмотра (далее - АРМ 3D Контроль) видеоизображений проходящего поезда в режиме ПОЛИЭКРАН с телекамер в режиме реального времени, а после прохождения зоны контроля из архива;
− вывод на экран монитора АРМ 3D Контроль 3D модели контролируемого вагона;
− сравнение 3D моделей формируемых последовательно расположенными по маршруту следования вагона системами АСКО 3D Контроль. Выявление динамики нарушения габарита погрузки, подвижного состава и фактов смещения груза;
− вывод на экран монитора АРМ 3D Контроль разностной модели, отображающей смещение элементов вагона и груза, полученных путем сравнения с моделями построенными системами АСКО 3D Контроль ранее по маршруту следования поезда;
− вывод на экран монитора АРМ 3D Контроль предупреждающих сообщений в случае выявления нарушения габарита погрузки, подвижного состава и фактов смещения груза;
− включение искусственного освещения в темное время суток и выключение при наступлении светлого времени суток;
− регистрация видеоизображений с шести телекамер на накопитель на жестких магнитных дисках (далее – НЖМД) специализированного системного блока АРМ 3D Контроль при прохождении поезда в зоне наблюдения;
− ведение архива видеоизображений; протоколирование данных о проходящих поездах в журнале событий; запись информации на внешние носители (встроенными средствами ОС Windows) видеоизображений фрагментов поезда с информацией о вагонах и негабаритностях.
− возможность выбора телекамеры для полноэкранного просмотра; просмотр видеоархива на экране монитора АРМ 3D Контроль, в том числе одновременно с записью проходящего поезда; воспроизведение видеоизображения с произвольной скоростью в прямом и обратном направлении; покадровый просмотр и режим СТОП-КАДРА; масштабирование произвольных областей в режиме СТОП-КАДРА;
− автоматический контроль габаритов с помощью лазерных сканеров на скоростях до 80 км/ч;
− автоматическое определение перечня контролируемых габаритов исходя из данных о типе и конструкции вагона, полученного из соответствующей базы данных;
− наглядное представление информации о негабаритности на экране монитора АРМ 3D Контроль путем локализации участков негабаритности и их отображения на трехмерной модели вагона;
− автоматическое выявление остатков грузов и посторонних предметов в открытом железнодорожном подвижном составе;
− выявление неравномерности погрузки однородного груза на открытом железнодорожном подвижном составе;
− автоматическое измерение скорости поезда в процессе движения;
− звуковая индикация начала поезда и вагонов с негабаритностями;
− прием информации о поезде (натурного листа) из системы передачи данных станции на автоматизированное рабочее место пункта коммерческого осмотра (далее АРМ ПКО);
− считывание из натурного листа и индикация на экране монитора АРМ 3D Контроль инвентарных номеров проходящих вагонов;
− компенсация геометрических искажений видеоизображений;
− передача покадровых изображений из видеоархива АРМ 3D Контроль в автоматизированную систему коммерческого мониторинга (по запросу из АСКМ);
− создание на АРМ 3D Контроль справки о поезде, в которой отображается вся информация о принятом поезде; вывод на печать справки о коммерческих неисправностях вагонов; вывод на печать покадровых изображений и изображений 3D моделей из архива АРМ 3D Контроль;
− формирование и отправка видеокадра из архива АРМ 3D Контроль с идентификацией станции, даты и времени прохождения поезда, номера поезда и вагона по электронной почте;
− контроль состояния технических устройств системы и передача данных с заданной периодичностью в систему ЕАСАПР для обеспечения своевременного обслуживания и предупреждения рисков возникновения неисправности системы.
− дистанционное включение (из помещения оператора) звуковой сирены;
− формирование запроса и передача/получение ответа на соответствующий запрос, содержащий покадровые изображения и двухмерные проекции 3D моделей от систем осуществивших осмотр по маршруту движения поезда;
− создание архива покадровых изображений и двухмерных проекций 3D моделей вагонов с привязкой к их инвентарному номеру в течении одной перевозки;
− создание архива покадровых изображений и двухмерных проекций 3D моделей вагонов с привязкой к их инвентарному номеру. Накопление информации о состоянии и оформленных выявленных и устраненных коммерческих неисправностях в течении жизненного цикла вагона.
Система включает в себя: автоматизированное рабочее место оператора пункта коммерческого осмотра поездов и вагонов АРМ 3D Контроль и автоматизированное рабочее место АРМ ПКО; комплект оборудования лазерного сканирования; комплект оборудования видеонаблюдения; комплект оборудования освещения; комплект оборудования подсистемы оповещения; комплект оборудования для передачи сигналов; комплект для монтажа; комплект ЗИП (запасных изделий и принадлежностей). АРМ 3D Контроль предназначено для визуального телевизионного контроля состояния крыш и бортов вагонов поезда, люков цистерн, а также крепления грузов на открытых вагонах на экране монитора во время прохождения поезда в зоне наблюдения; для автоматического контроля габаритов в процессе движения поезда; для протоколирования данных о проходящем составе; для создания архивов, в том числе видеоархивов, архивов 3D моделей, а также для печати протоколов; для создания копий 3D моделей и видеофрагментов состава на внешних носителях; для включения звукового сигнала.
АРМ ПКО предназначено для получения из СПД натурного листа и передачи данных на АРМ 3D Контроль; получения с АРМ 3D Контроль справки о негабаритностях; формирование отчетно-учетной документации; печать отчетных документов на принтере АРМ 3D Контроль; формирование уточненного натурного листа и передачу его в СПД.
Комплект оборудования подсистемы лазерного сканирования включает в себя:
- три (и более) лазерных сканера, предназначенные для формирования профилей вагонов (грузов). Сканеры контролируют пространство, образуя плоскость сканирования перпендикулярно направлению движения поезда
− датчик колёс, расположенный с внутренней стороны рельса, и предназначенный для определения начала поезда, определения направления движения, счета вагонов и
определения скорости поезда;
− оптические датчики, предназначенные для определения наличия поезда в створе габаритных ворот.
Комплект оборудования подсистемы видеонаблюдения включает в себя шесть сетевых камер высокого разрешения либо камер линейного сканирования, причем телекамеры устанавливаются в защитные контейнеры-термостаты.
Комплект оборудования подсистемы освещения предназначен для создания достаточной освещенности стенок и крыши вагонов в темное время суток с целью сохранения эффективности функционирования подсистемы видеонаблюдения. Подсистема искусственного освещения построена таким образом, чтобы в темное время суток обеспечивалась различимость деталей бортов и крыш вагонов, а также размещенных на них грузов на экране монитора АРМ 3D Контроль и могла осуществляться видеорегистрация проходящего поезда.
В качестве источников света используются светодиодные прожекторы, располагаемые следующим образом:
− для освещения стенок вагонов - попарно слева и справа от рельсового пути;
− для освещения крыш вагонов - два светодиодных прожектора, расположенные над рельсовым путем.
Светодиодные прожекторы могут быть расположены, например, на несущей конструкции, включающей две опоры и ригель.
Комплект оборудования подсистемы оповещения предназначен для дистанционной подачи сигналов предупреждения в зону несущей конструкции системы с помощью звуковой сирены, с целью предупреждения вандализма. Сирена располагается в створе габаритных ворот.
Функционирование системы
Система АСКО ПВ 3D Контроль базируется на комплексе аппаратно-программных средств автоматизированных рабочих мест пункта коммерческого осмотра, который включает в себя АРМ 3D Контроль с установленным программным обеспечением и АРМ ПКО.
Сигналы в цифровом виде от шести телекамер передаются по сети Ethernet для отображения на экране монитора АРМ 3D Контроль.
При получении информации о подходе поезда к зоне контроля оператор вводит с клавиатуры ПЭВМ АРМ 3D Контроль номер принимаемого поезда и количество локомотивов в нём, а также порядок их следования: при следовании локомотивов в хвосте поезда вводится "0", а в голове поезда – количество локомотивов от одного до четырех. Введенная оператором информация передается в блок согласования который загружает внутренний счетчик вагонов и начинает опрос лазерных сканеров.
При пересечении поездом места установки датчика колёс формируются электрические сигналы, которые поступают в блок контроля и обработки где формируется сигнал начала обработки и передает его в АРМ 3D Контроль, при этом начинается процесс записи информации на НЖМД системного блока АРМ 3D Контроль. Блок контроля и обработки анализируя сигналы от датчика колёс, ведет порядковый счет проходящих вагонов поезда и вычисляет его скорость движения.
С помощью оптических датчиков формируется сигнал об обнаружении поезда в зоне наблюдения. В случае остановки (замедления) поезда с датчика продолжает поступать сигнал о наличии вагона в зоне наблюдения, а процесс записи информации продолжается с уменьшенной скоростью. При возобновлении движения поезда счет вагонов продолжится.
Лазерные сканеры контролируют пространство в створе габаритных ворот, образуя плоскость сканирования перпендикулярно направлению движения поезда. По мере прохождения состава через плоскость сканирования формируется массив поперечных профилей, каждый из которых сравнивается с шаблонами габаритов погрузки. Выход отсканированного профиля за пределы шаблона фиксируется как негабаритность и отображается на 3D модели закрашенными участками (красным цветом), как показано на фиг. 3.
В трех видеоокнах (или четырех, в зависимости от конфигурирования) на экране монитора АРМ 3D Контроль отображаются видеоизображения проходящего поезда, поступающие от телевизионных камер высокого разрешения либо камер линейного сканирования (в зависимости от местных условий работы железнодорожной станции), а на панели отображения зон негабарита отображается информация от лазерных сканеров в виде контура текущего среза вагона, на которых выявленные негабаритности отображаются красным цветом. В видеоокнах предусмотрена компенсация геометрических искажений изображений от телекамер. Факт негабаритности сопровождается подачей звукового сигнала и регистрируется в архиве, размещенном на жёстком диске системного блока АРМ 3D Контроль с фиксацией порядкового номера вагона. При необходимости, оператор может в режиме воспроизведения информации от выбранной телекамеры нажатием на клавиатуре АРМ 3D Контроль определенной клавиши произвести маркирование кадра с изображением вагона с замеченной неисправностью.
После прохождения поезда оператор может просмотреть записанную информацию. Воспроизведение изображения возможно с произвольной скоростью в прямом и обратном направлении. В случае выявления кадра с неисправным вагоном оператор включает режим СТОП-КАДР и, при необходимости, печатает формированное изображение (твердую копию) на принтере или сохраняет данные на внешнем носителе. В режиме СТОП-КАДР оператор может масштабировать произвольные области изображения. При просмотре архивных записей можно сформировать трёхмерную модель вагона, полученную в результате сращивания поперечных отсканированных профилей вагона.
При вскрытии аппаратного шкафа расположенного на несущей конструкции производится запись видеофрагмента с той телекамеры, которая запрограммирована и, в зоне просмотра которой, находится шкаф. При этом оператор информируется о данном событии звуковым сигналом и сообщением о вскрытии шкафа на экране монитора.
Информационный обмен между АРМ ПКО и АРМ 3D Контроль осуществляется по локальной вычислительной сети на базе сетевого коммутатора. Подача звукового сигнала сиреной в створе несущей конструкции контролируемого пути производится по команде оператора. Включение освещения в створе ворот может осуществляться в автоматическом или в ручном режиме.
Автоматически освещение включается в двух вариантах: с помощью цифрового астрономического таймера или по приходу поезда в темное время суток. С помощью цифрового астрономического таймера освещение включается с наступлением темного времени суток и выключается с наступлением светлого времени суток. Если запрограммировано включение освещения по приходу поезда, то оно включится только в темное время суток и при пресечении локомотивом створа несущей конструкции, а выключится освещение после проезда последнего вагона поезда. В темное время суток при наличии поезда в створе несущей конструкции или при сработавшем цифровом астрономическом таймере оператор не имеет возможности принудительного выключения освещения.
Для исключения запотевания оптических окон контейнеров телекамер, появления конденсата аппаратного шкафа, а также снижения температуры в них ниже допустимой, включение/выключение обогрева при понижении/повышении температуры внутри их корпусов происходит автоматически с помощью термодатчиков.
Информационный обмен между АРМ 3D Контроль и АРМ ПКО осуществляется по локальной вычислительной сети. В АРМ 3D Контроль из АРМ ПКО передаются сообщения о прибывшем поезде, полученные из натурного листа (порядковый и инвентарный номера вагонов). В АРМ ПКО из АРМ 3D Контроль передаются сообщения об осмотре прибывшего поезда и обнаруженных коммерческих браках.
В случае совпадения данных полученного сообщения, отображаемых в окнах индикации порядкового и инвентарных номеров, и видеоданных программного обеспечения АРМ 3D Контроль, анализируемых оператором путем визуального контроля, данные, полученные техническими средствами, передаются по локальной сети в АРМ ПКО, где производится формирование отчетно-учетной документации.
В случае несоответствия инвентарных номеров, полученных из сообщения, и инвентарных номеров вагонов, отображаемых в видеоокнах монитора АРМ 3D Контроль и оцениваемых оператором визуально, в базе данных АРМ 3D Контроль соответствующие вагоны маркируются оператором для оперативного доступа к изображению конкретного вагона и корректировке инвентарного номера вагона вручную.
При доступе оператора к маркированным вагонам для корректировки вручную инвентарного номера вагона производится проверка допустимости вводимой информации.
АРМ ПКО обеспечивает автоматический прием данных из АРМ 3D Контроль, и на основе этих данных оператор формирует уточненный натурный лист (в части соответствия количества вагонов и инвентарных номеров в составе поезда) и передает его в сеть передачи данных станции.
Применение системы АСКО 3D Контроль для автоматического выявления коммерческих неисправностей вагонов в поездах позволяет повысить обеспечение безопасности на железных дорогах, за счет повышения уровня контроля неисправностей и контроля выхода за габарит железнодорожных вагонов или грузов, что позволяет повысить качество осмотра и улучшить прогнозируемость случаев нарушения безопасности движения поездов, а также создать безопасные условия труда и улучшить охрану труда работников.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА КОММЕРЧЕСКИМИ НЕИСПРАВНОСТЯМИ НА ПОДВИЖНОМ СОСТАВЕ | 2003 |
|
RU2252886C2 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНО-ГАБАРИТНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2021 |
|
RU2764816C1 |
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| СПОСОБ И СИСТЕМА КОМПЛЕКСНОГО ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ, СОХРАННОСТИ И ГАБАРИТНОСТИ ГРУЗОВ, ПЕРЕВОЗИМЫХ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2006 |
|
RU2317907C2 |
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
Изобретение относится к устройству для определения габаритности перевозимых грузов. Автоматизированная система коммерческого осмотра (АСКО) для автоматического выявления коммерческих неисправностей вагонов в поездах путём построения 3D модели вагона, её интеллектуальной обработки, визуального контроля. АСКО содержит камеры, установленные слева, справа и над рельсовым путем, лазерные сканеры, по одному слева и справа, один над рельсовым путем. Также в месте установки камер и сканеров на рельсе устанавливается тензометрический датчик счета колёс, а слева, справа или над рельсовым путем оптический датчик измерения скорости. Данные от камер, сканеров и датчиков передаются по локальной вычислительной сети на входы модуля обработки сигналов, выход которого соединен с сетевым коммутатором, который передает сигналы на ПЭВМ автоматизированного рабочего места (АРМ). На АРМ осуществляется визуализация, обработка, хранение и архивация информации, также в АРМ сопоставляются результаты проведенного контроля с информацией, полученной по результатам предыдущих осмотров пути следования, а также получают прогнозную вероятность дальнейшего изменения состояния положения груза. Технический результат заключается в повышении безопасности на железных дорогах. 9 з.п. ф-лы, 3 ил.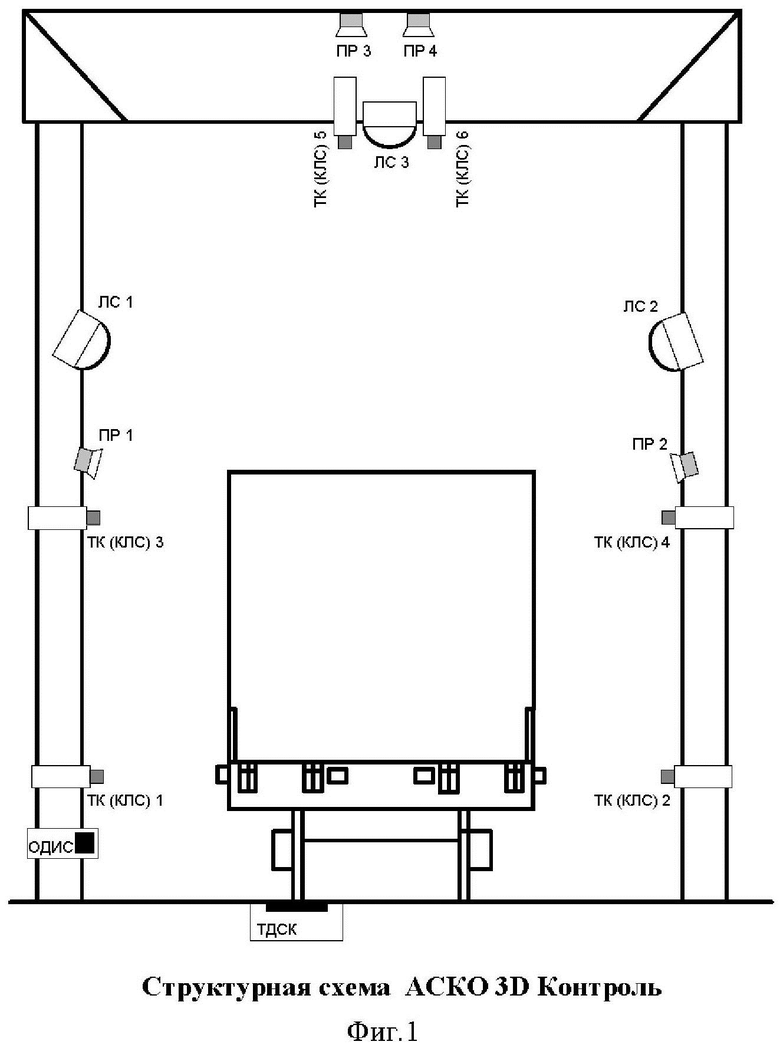
1. Автоматизированная система коммерческого осмотра (АСКО) для автоматического выявления коммерческих неисправностей вагонов в поездах, угрожающих безопасности движения и сохранности перевозимых грузов, путём построения 3D модели вагона, её интеллектуальной обработки, визуального контроля, контроля соответствия полученных параметров 3D модели вагона заданным шаблонам габаритов, контроля соответствия полученных параметров 3D модели вагона заданным эталонным моделям вагонов, выявления смещений элементов вагона и груза, вычисляемых относительно уровня головки рельса, а также выявления смещений элементов вагона и груза, вычисляемых относительно данных, полученных при погрузке, и 3D модели вагона, полученной при осмотре на предыдущей системе АСКО 3D Контроль по маршруту следования поезда; в состав АСКО 3D Контроль входят камеры для формирования видеоизображения, установленные слева, справа и над рельсовым путем, по меньшей мере, три лазерных сканера, по одному слева и справа, один над рельсовым путем, при этом все данные с камер и сканеров передаются на ПЭВМ, а в качестве камер используются камеры линейного сканирования и/или камеры высокой четкости с системой собственного шумоподавления, причем камеры расположены по меньшей мере по две слева и справа от рельсового пути и по меньшей мере две камеры над рельсовым путем, причем нижние камеры слева и справа установлены на уровне 0,5–1,5 м от головки рельса, а в качестве лазерных сканеров могут быть использованы однолучевые сканеры либо многолучевые, также в месте установки камер и сканеров на рельсе устанавливается тензометрический датчик счета колёс (ТДСК), а слева, справа или над рельсовым путем оптический датчик измерения скорости (ОДИС), данные от телекамер, сканеров и датчиков передаются по локальной вычислительной сети на входы модуля обработки сигналов (МОС), выход которого соединен с сетевым коммутатором, который передает сигналы на ПЭВМ автоматизированного рабочего места (АРМ); на АРМ осуществляется визуализация, обработка, хранение и архивация информации, а с помощью тензометрического датчика счета колес (ТДСК) определяется начало и конец состава, производится счет вагонов, с помощью оптического датчика измерения скорости (ОДИС) вычисляется скорость контролируемого состава, выявляются по заранее определенным критериям нарушения габаритов погрузки и подвижного состава, также в АРМ сопоставляются результаты проведенного контроля, в том числе и сформированная 3D модель вагона, и/или поезда, и/или груза, с информацией, полученной по результатам предыдущих осмотров пути следования и данных, полученных из смежных систем, осуществивших контроль ранее по маршруту следования вагона и груза, а также получают прогнозную вероятность дальнейшего изменения состояния положения груза относительно первичного результата контроля в пути следования.
2. Автоматизированная система по п.1, отличающаяся тем, что дополнительно система содержит подсистему лазерного сканирования, обеспечивающую построение 3D модели вагона.
3. Автоматизированная система по п.1 или 2, отличающаяся тем, что по результату контроля обеспечивается построение 3D модели вагона, её интеллектуальная обработка, визуальный контроль, контроль соответствия полученных параметров 3D модели вагона заданным шаблонам габаритов, контроль соответствия полученных параметров 3D модели вагона заданным эталонным моделям вагонов, выявление смещений элементов вагона и груза, вычисляемых относительно уровня головки рельса, а также выявление смещений элементов вагона и груза, вычисляемых относительно данных, полученных при погрузке, и 3D модели вагона, полученной при осмотре на предыдущей системе АСКО 3D Контроль по маршруту следования поезда.
4. Автоматизированная система п.1, отличающаяся тем, что дополнительно система содержит подсистему искусственного освещения, а именно два светодиодных прожектора для освещения стенок вагонов, попарно установленных слева и справа от рельсового пути, а для освещения крыш вагонов - два светодиодных прожектора, расположенных над рельсовым путем.
5. Автоматизированная система по п.4, отличающаяся тем, что подсистема искусственного освещения включается посредством цифрового астрономического таймера или по приходу поезда в темное время суток.
6. Автоматизированная система по п.1 или 3, отличающаяся тем, что по результатам осмотра, с помощью собственных технических средств видеофиксации и лазерного контроля, а также обработки оператором АРМ, в автоматическом режиме формируется справка, причем справка через дополнительный сетевой коммутатор автоматически передается на рабочее АРМ пункта коммерческого осмотра (АРМ ПКО).
7. Автоматизированная система по п.1 или 3, отличающаяся тем, что автоматический контроль габаритов с помощью лазерных сканеров осуществляется на скоростях до 80 км/ч.
8. Автоматизированная система по п.1 или 3, отличающаяся тем, что взаимодействие системы осмотра со смежными автоматизированными системами производится посредством волоконно-оптической системы передачи данных (ВСПД).
9. Автоматизированная система по п.1 или 3, отличающаяся тем, что осуществляется контроль при вскрытии аппаратного шкафа, расположенного на несущей конструкции, и производится запись видеофрагмента с той телекамеры, которая запрограммирована и в зоне просмотра которой находится шкаф, а также подается звуковой сигнал на АРМ о данном событии и сообщение о вскрытии шкафа на экране монитора.
10. Автоматизированная система п.7, отличающаяся тем, что система снабжена возможностью подачи звукового сигнала сиреной в створе несущей конструкции контролируемого пути.
| Автоматизированная система коммерческого осмотра поездов и вагонов | 2018 |
|
RU2682148C1 |
| ПАЯЛЬНИК | 1927 |
|
SU8682A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА КОММЕРЧЕСКИМИ НЕИСПРАВНОСТЯМИ НА ПОДВИЖНОМ СОСТАВЕ | 2003 |
|
RU2252886C2 |
| US 8150105 B2, 03.04.2012 | |||
| CN 103723161 A, 16.04.2014. | |||

